
位置伺服系统在射线检测中的应用
2021-06-11 04:07李子津高连杰
河南化工 2021年5期
李子津,高连杰
(洛阳欣隆工程检测有限公司,河南 洛阳 471012)
位置伺服系统也被称为位置随动系统,系统的输出量(或者是被控量)为空间位移,当给定量(位置命令)发生随机变化时,系统的输出量可以精确地跟踪给定量的变化并能复现给定量[1]。
1 位置伺服系统的应用
位置伺服系统是应用领域非常广泛的一类系统,遍及国民经济的各个工业部门,应用例子不胜枚举。例如:机械加工过程中,机床的定位控制和加工轨迹控制是位置伺服系统的典型实例,仿型铣床的跟踪控制,坐标镗床的定位控制以及数控机床轨迹控制;冶金工业中,轧钢机压下装置以及其他辅助设备的控制;雷达、天线或电子望远镜对目标的定位和巡航进行控制;各类飞行器的姿态、各种交通运输系统路线的设定和控制,都是位置伺服系统的实际应用。它的应用从国防、工业生产、交通运输乃至家庭生活的每一个方面。
位置伺服系统可以很好地应用在射线检测工作中。通过简单的PID控制算法以及参数的工程整定法都能有效地达到位置的跟随,可以对位置伺服系统输出的指令进行控制,并且可以通过数据对被控制对象的变化量进行监控。控制方式上伺服系统是一个闭环控制的程序,这种控制方式,可以简单地分为以下两种类型。第一种是通过控制误差来实现,由前向通道和反馈通道两个部分组成,见图1。第二种是复合控制系统(误差和扰动),将负反馈和前馈相结合。也称为“开环-闭环”控制系统,见图2。
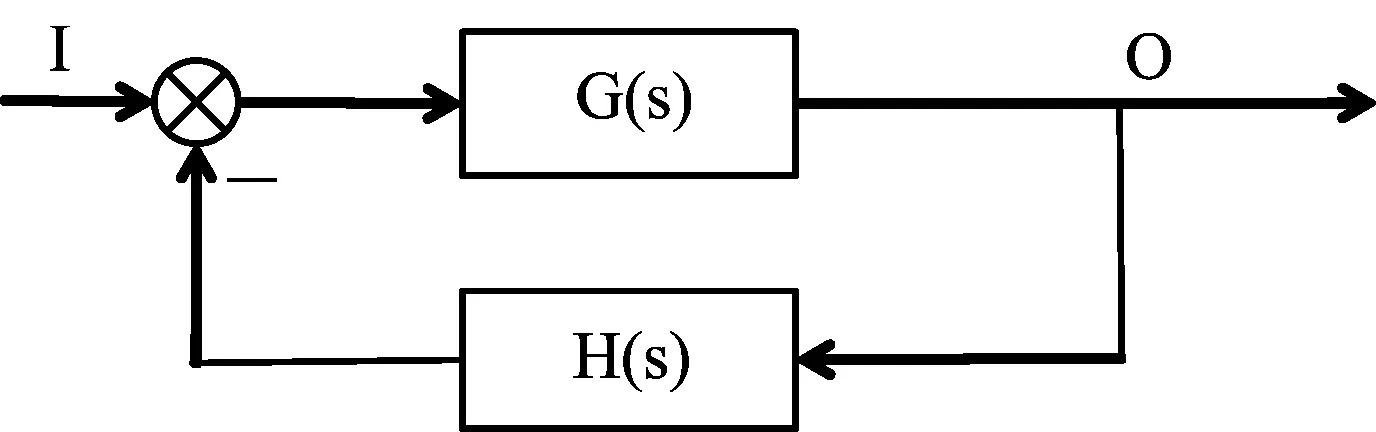
图1 误差控制系统
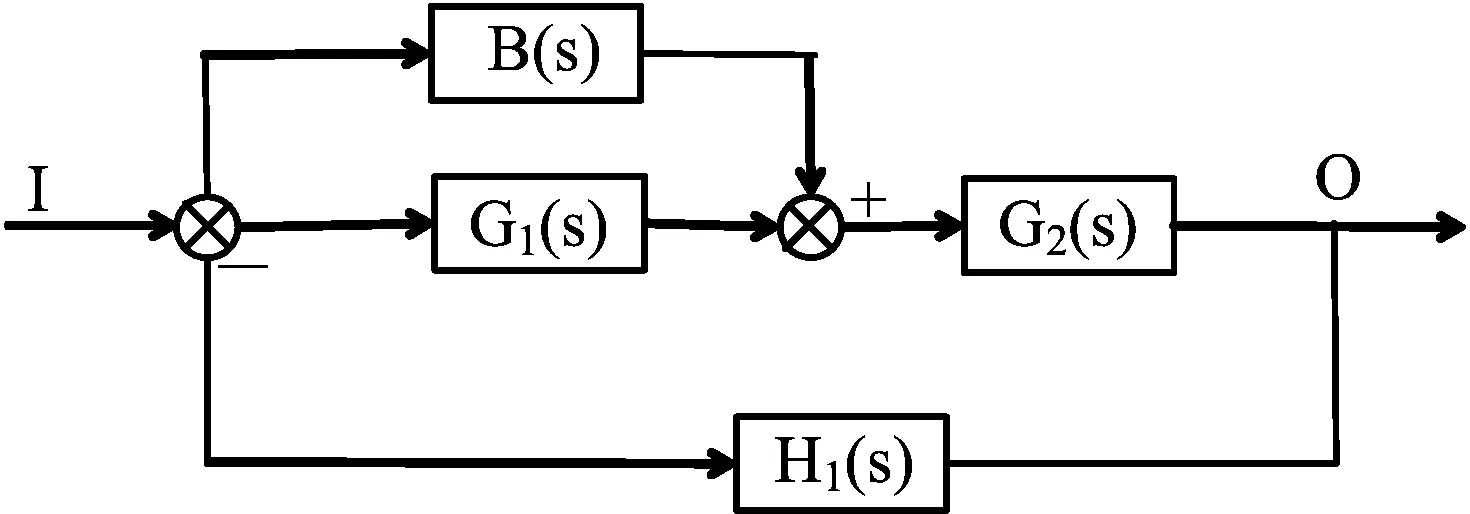
图2 复合控制系统
这种复合控制形式的伺服系统引入前馈环节之后,可以有效地提高系统的精度并缩短响应时间,但对闭环环节的稳定性并不产生扰动。
伺服系统结构图如图3所示。在实际运行当中的伺服系统拥有测量元件,用来对输出量进行测量,并产生反馈信号,可以对被控制对象的扰动进行监控。伺服系统有变换放大和校正装置,保证输入信号的品质;有执行环节,用于对被控对象执行操作;除此之外,一般还有信号转换电路和其他补偿装置。这些装置只是伺服系统中必要的基本环节,同时这些环节的辅助部分同样应该有相应的保护装置及控制环节等。各个部分相互配合、相辅相成,伺服系统便可以正常地完成任务。
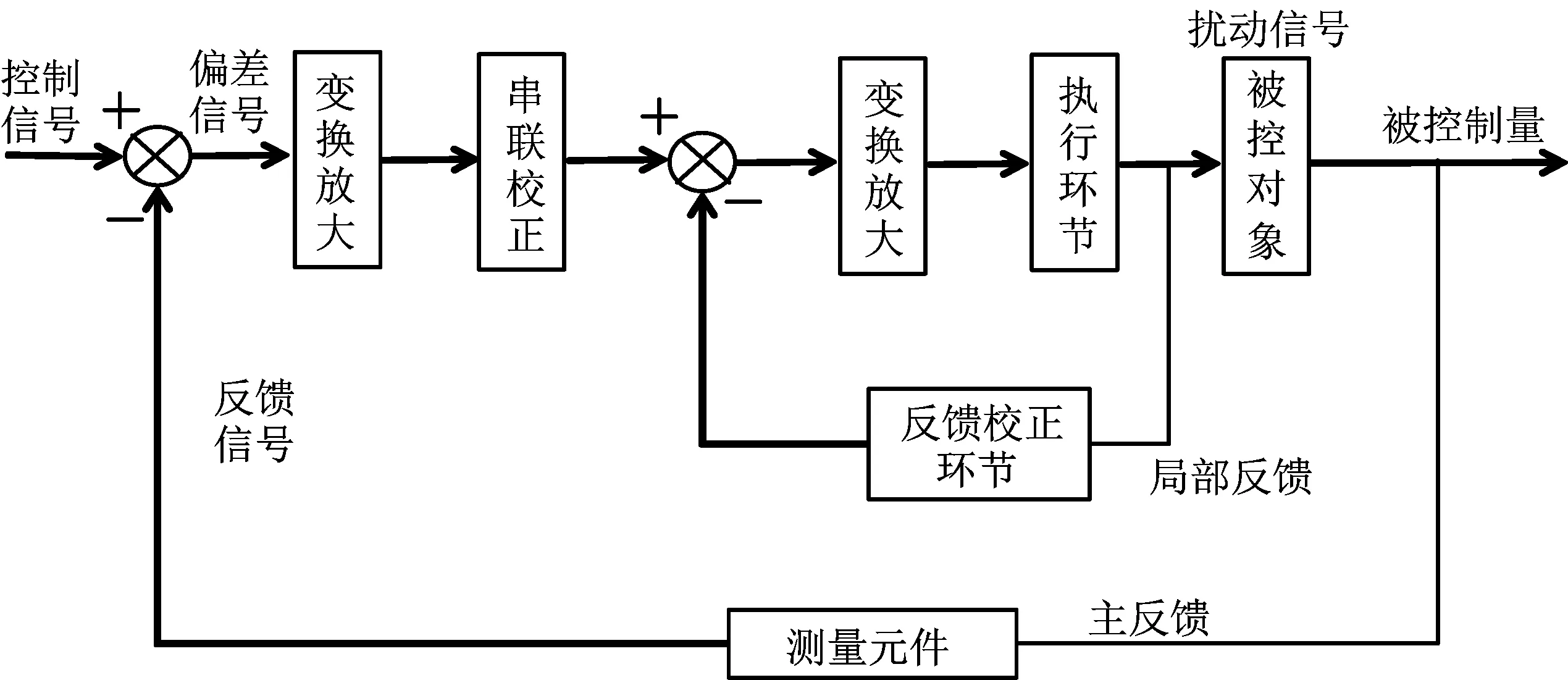
图3 伺服系统结构图
2 PID调节器
位置伺服系统的运动控制算法对位置伺服系统的运行起到非常重要的作用。将偏差的比例(P)、积分(I)、微分(D)用来进行控制的调节器称为PID调节器,是连续运行的系统中被广泛运用的一种调节器。PID调节器参数容易调整,在工业应用中,系统的参数需要不断地调整,如果通过运行控制理论对数据进行分析整合,要耗费较大的代价,且往往无法达到预期效果,所以采用PID调节器是一个较为方便的解决方法,可对相关参数进行整定。
PID调节器是通过PID算法完成对参数调节的线性调节器,是通过设定值r与实际输出值y进行对比并形成差值(e=r-y),通过比例(P)、积分(I)、微分(D)进行线性组合,构成对控制对象反馈的控制信号,所以称为PID调节器。
在实际应用中,可以根据被控制对象的特性和控制需求,取一部分环节构成控制器也是可以完成相关控制工作。例如,比例(P)调节器、比例积分(PI)调节器、比例微分(PD)调节器等。
在射线检测的应用中,可以通过整定比例部分,快速地得到被控对象的变化值,但是可能会存在反馈静差值较大的情况,对检测结果的准确性有较大的影响。加入积分环节,可以消除静差,同时保持系统的良好动态性能。为了保证良好的动态性能,微分环节的加入是控制动态性能的关键,使得在完成检测结果的同时,提高调整控制的灵敏度和稳定性。
3 射线检测中的应用
射线检测中,现场人员拍摄底片,根据工艺完成透照角度时,射线机的摆放角度和被检工件摆放角度的调整,往往会耗费大量的时间和人力,然而通过PID控制器对射线机和被检工件位置的调整,可以更精确、迅速地调整到合适的角度,以达到工艺制定的要求;并可以通过将遮挡、散射等影响检测结果的因素设置为扰动信号,通过PID控制器的放大和反馈环节,通过反馈环节得到的数据对控制信号的参数进行负反馈调节,根据对底片呈现的图像要求,对角度进行细微的调整,得到最佳的透照角度,形成数据记录,可以减少补片量,从而降低工作成本,提高工作效率。
4 结论
射线检测可以很好地利用位置伺服系统来完成对检测结果成像的优化,通过PID控制器来实现对控制对象调整的高效性、精确性和稳定性。位置伺服系统由简单有效的PID控制器来完成位置伺服的工作,不仅可以更高效地完成检测工作,而且极大地降低了射线检测工作的检测成本,同时可以自动化生成反馈数据,对检测工作的优化提供数据分析。位置伺服系统和PID算法的引入,不仅提高了检测工作效率,更为检测工作流程化、信息化、自动化奠定基础,有利于建立智能化工厂,为成为行业的领跑者提供有力支持。
猜你喜欢
数学小灵通·3-4年级(2022年10期)2022-10-25
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
宇航计测技术(2018年3期)2018-09-08
初中生世界·七年级(2016年2期)2016-03-03
北京航空航天大学学报(2016年4期)2016-02-27
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2014年6期)2014-02-27
汽车与新动力(2014年2期)2014-02-27
