链式STATCOM载波移相调制开关频率的优化方法
2021-06-09 07:45南昌工程学院南昌市高压大功率电力电子技术重点实验室机械工程学院江西南昌330099
南昌工程学院学报 2021年6期
(南昌工程学院 1.南昌市高压大功率电力电子技术重点实验室;2.机械工程学院,江西 南昌 330099)
链式STATCOM是一种基于大功率换流技术的静止无功补偿装置。它采用了多个单相逆变桥级联的结构形式[1],可以通过吸收或发出连续调节的无功功率来稳定连接点处的电压,提高系统的负荷能力。除此之外,链式STATCOM还有着原理简单、控制方便、易于模块化、容易实现冗余容错等诸多明显优点,在工业中的应用十分广泛[2-3]。
调制技术是链式STATCOM研究的关键技术之一,而开关频率是影响调制效果的关键因素,选择合适的开关频率有利于达到最好的调制效果,使系统的各项指标满足工业要求。对于链式STATCOM系统,目前最为常用的调制手段是单极性倍频载波移相调制策略,张祥虎[4]等从原理层面分析了载波移相调制方式,通过与其他调制方法的对比,验证了这种调制方法的优越性。Zhang[5]等提出了一种基于VF的PWM算法。Xu[6]等根据载波移相调制策略的等效开关频率高、开关损耗小的优点提出了多电平控制策略。She[7]讨论了载波移相调制对链式STATCOM系统的影响。然而,现有文献并没有给出开关频率与调制效果之间定量的分析过程,无法为开关频率的最优设计提供指导。
因此,在现有研究基础上提出了一种基于载波移相调制的链式STATCOM的开关频率的优化方法。通过建立开关频率与链式STATCOM的相关参数之间的数学模型,分析开关频率对调制效果的影响,得出最合适的开关频率。
1 链式STATCOM的电路结构
链式STATCOM装置的结构有两种接线形式,分别是三角形结构和星形结构,其中三角形结构没有中性点,而星形结构有中性点。以星形链式STATCOM为例,其电路原理图如图1所示。
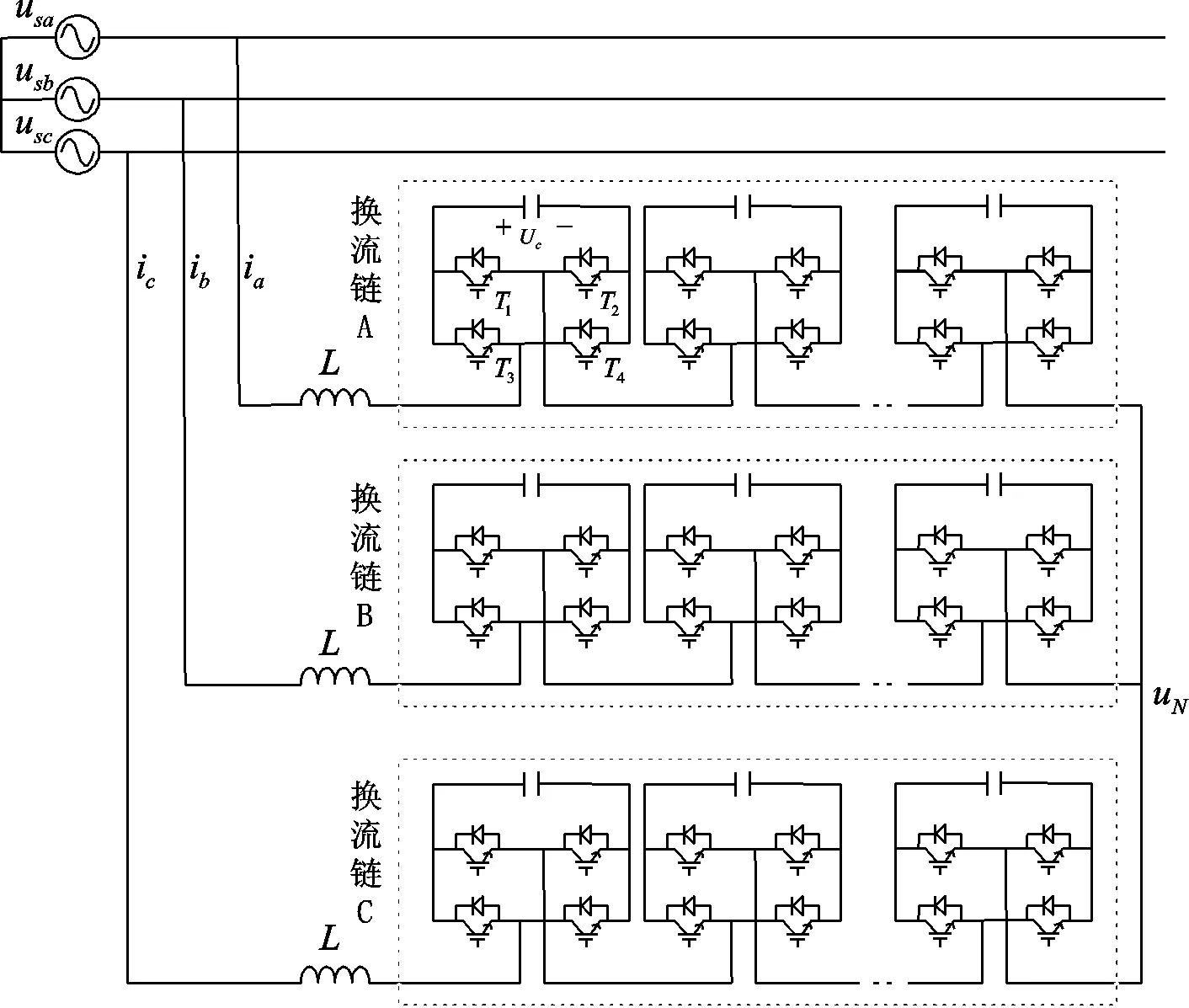
图1 星形链式STATCOM电路原理图
由图1可知,链式STATCOM每一相都由N个功率单元(电压源逆变器)级联而成,这些功率单元组成一个换流链,然后通过连接电抗器接入系统。
链式STATCOM的优点之一是可以实现模块化设计,这是由于无论是星形结构还是三角形结构,其所用的功率单元的结构完全相同。在实际应用中,将这些完全相同的功率单元串联起来,可以提高设备的电压等级,功率模块结构为电压源逆变H桥,其可以产生3电平输出:当同时导通T1和T4时,该模块可输出一个为Uc的正电平;当同时导通T2和T3时,可输出一个-Uc的负电平;当同时导通T1和T2或T3和T4时,则输出零电平。
将N个功率单元串联形成换流链时,N个H桥单元输出电压经过叠加可得到2N+1级的阶梯电压波形[8-9],实现多电平输出。
2 开关频率与链式STATCOM性能的关系
2.1 开关频率与模块数之间的关系
为了讨论开关频率与模块数之间的关系,首先讨论在一个控制周期内系统的变化。由于三相系统的对称性,只需要讨论一相便可以推广到其他相,以图1所示的星形链式STATCOM为例,对于三相对称系统来说,uN=0,以下讨论以此为前提。以图1中的换流链A为例,设m为调制比,N为单相模块数,ω为调制波角频率,其调制波可定义为
(1)

(2)
式中f为电网基波频率,fctrl为控制器控制频率。

(3)
则有
2mNπ(f/fctrl)sin(2πf/fctrl)=1.
(4)
在实际工程中,一般有fctrl≫2πf,则有
sin(2πf/fctrl)≈2πf/fctrl.
(5)
将其代入式(4)中可得
4mNπ2f2/fctrl=1.
(6)
因此有
(7)
(8)
由此可以求得临界控制频率f2为
f2=2πfmN
(9)
在实际应用中,控制频率通常满足f1 (10) 设备的开关损耗是开关管开通与关断过程中产生的损耗。链式STATCOM的开关管为IGBT,其开关损耗包括IGBT及其反并联二极管的损耗。 以FS450R17KE3、FF200R17KE4、FZ600R17KE4型IGBT为例,通过开关损耗监控软件,可以测得在不同开关频率下的开关管平均损耗,将其绘制成开关管的平均损耗与开关频率的曲线,如图2所示。 图2 开关频率与IGBT平均损耗关系曲线 由图2可知,开关频率与开关管平均损耗正相关。本文将以损耗与性能相对平衡的FZ600R17KE4型IGBT为例进行下一步研究,通过二次拟合可得其损耗曲线函数为 (11) 在实际系统中,往往存在延时,一般情况下系统的延时近似于一个开关周期。换流链采用了基于DQ解耦的恒电流控制[10],其闭环控制简化框图如图3所示。 图3 链式STATCOM闭环控制框图 在控制系统中,延时环节的传递函数为e-sTk,其中Tk为开关周期,而在实际工程中Tk一般很小,因此延时环节e-sTk≈1/(1+sTk)。根据文献[11]可知恒电流控制系统结构可等效为如图4所示。 图4 恒电流控制系统等效控制框图 可得到相应的开环传递函数为 Gi(s)=KPWMGPI(s)Gdelay(s)Gr(s). (12) 其中 GPI(s)=Kp+Ki/s≈Kp, 则有 (13) 此处定义K=KPWM·Kp/L. 可得其幅相特性 (14) 可以求得截止频率ωc和穿越频率ωx分别为 (15) 则进一步可得幅值裕度和相角裕度 (16) 根据式(16)可知,系统的幅值裕度趋于无穷,相角裕度与系统开环增益和开关周期相关,选择合适的PI参数,可以保证系统稳定,且若保持其它参数不变,当Tk增大时,会导致相位裕度减小,即当开关频率增大时系统的稳定性会变差。 本文以容量为4Mvar,母线电压为11kV的链式STATCOM为例来验证所提开关频率的优化方法。相关参数如表1。 式(10)得出了开关频率与模块数之间的关系,代入相关数据可求得: 218Hz (17) 式(11)得出了开关频率与平均损耗的函数关系式。由于在实际工程中,一般要求开关损耗低于总功率的1%,在4 Mvar的链式STATCOM中开关损耗应低于40 000 W。每相有12个基本功率模块,每个模块中有4个开关管,则一共有144个开关管,因此每个开关管的损耗应低于40000/144=277.8 W,即ploss-av<277.8 W,则根据函数关系式可得 fk<1180.1 Hz, (18) 式(16)得出了链式STATCOM系统的幅值裕度和相角裕度,在电压等级为11 kV的链式STATCOM中,Kpwm=10 200,PI参数一般为Kp=0.0006,Ki=0.006。工业上一般要求Gm≥6 dB,Pm≥30°,代入相关数据可得 fk≥353 Hz. (19) 结合式(17)~(19),可得在容量为4 Mvar,母线电压为11 kV的链式STATCOM系统中开关频率应满足 353 Hz≤fk<754 Hz. (20) 为了验证本文提出的链式STATCOM开关频率优化方案,利用MATLAB/Simulink搭建了一个基于CPS-SPWM调制的链式STATCOM仿真系统。仿真中各参数见表1。 表1 4Mvar链式STATCOM相关参数 仿真条件为:星型链式STATCOM的电网输入电压为10 kV,在0.01 s时投入STATCOM。仿真时间设置为1 s,分别测试开关频率为100 Hz、500 Hz、9 000 Hz的输出情况,直流侧平均电压仿真结果如图5所示。 图5 不同开关频率下的直流侧平均电压 由图5可知,当开关频率过小时,系统将变得不稳定,这验证了前文所分析的内容,当开关频率满足条件时,系统将保持稳定。应该注意的是,开关频率的增大将会导致系统的开关损耗的增加。 换流链电流和A相电容电压仿真结果如图6所示。 图6(a)~(b)分别为开关频率为100Hz情况下的换流链电流和A相各子模块的电容电压,此开关频率为本文所讨论的不稳定的情况,仿真结果验证了这一点;图6(c)和图6(d)分别为开关频率为500Hz情况下的换流链电流和A相各子模块的电容电压,此时换流链电流的谐波畸变率为0.94%,电容电压波动率为6.1%;图6(e)和图6(f)分别为开关频率为900Hz情况下的换流链电流和A相各子模块的电容电压,此时换流链电流的谐波畸变率为1.2%,电容电压波动率为5.7%。可见在各开关频率下,换流链电流都趋于稳定,且谐波畸变率都符合工业要求,但可以看出,在本文所提优化开关频率区间内,其换流链电流的谐波畸变率要比其他两种情况要低;而对于电容电压,随着开关频率的增大,电容电压波动率随之降低,另外,其稳定情况有明显改善,证明了随着开关频率的增大,系统的稳定性也随之增强。 图6 仿真结果 为进一步验证所提开关频率优化方法,搭建母线电压为11kV,容量为4Mvar的链式STATCOM实验平台,实验装置如图7所示。将开关频率设置为本文得出的开关频率区间。为不失一般性,这里将开关频率选择为500Hz,利用示波器采集换流链电流和电容电压,其波形如图8所示。 图7 链式STATCOM实验设备 图8 链式STATCOM的实验波形 图8中波形1为系统稳态时的功率模块交流侧电压稳态时的输出波形,可见实验所得数据为实验设备稳态时的输出,其有效值为701V;波形2为稳态时的直流侧平均电压,其平均值为1 090V;波形3和波形4分别为A相遇B相的输出电流,其有效值为211A,对应的峰值为300A,可见仿真结果与实验结果一致。 本文分析了采用载波移相调制技术的链式STATCOM的开关频率与单相模块数、开关损耗、系统稳定性之间的关系,并以母线电压为11kV,容量为4Mvar的链式STATCOM为例,根据工业需求确定了相应的开关频率的范围,区分这些范围的并集,得到最佳开关频率范围,实现开关频率的优化。 分析表明,随着开关频率的增大,系统稳定性也越好,但是相应的开关损耗和延时都有所增加。本文通过建立链式STATCOM相关参数与开关频率之间的数学模型,可以得到合适的开关频率要求,从而达到兼顾各参数性能的目的。2.2 开关频率与开关损耗之间的关系
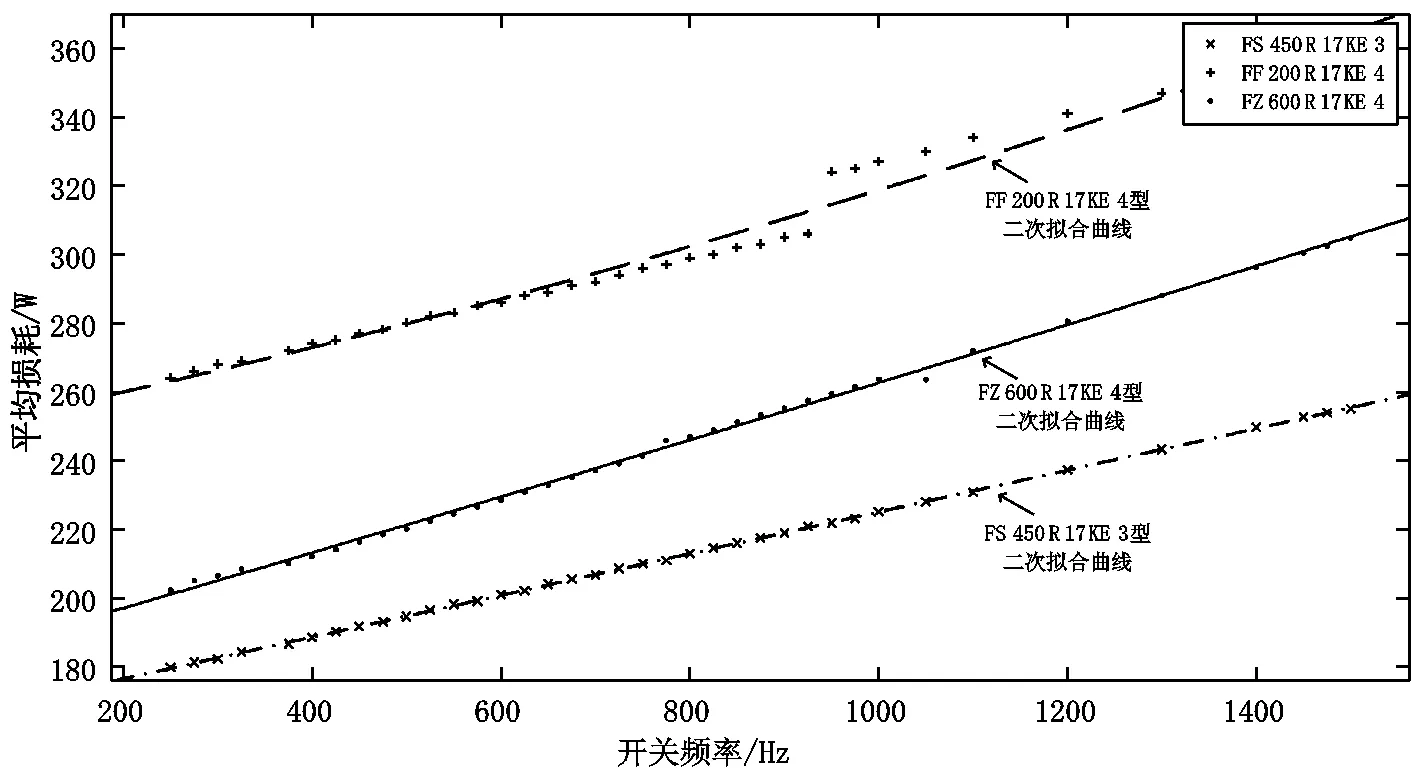
2.3 开关频率与稳定性之间的关系

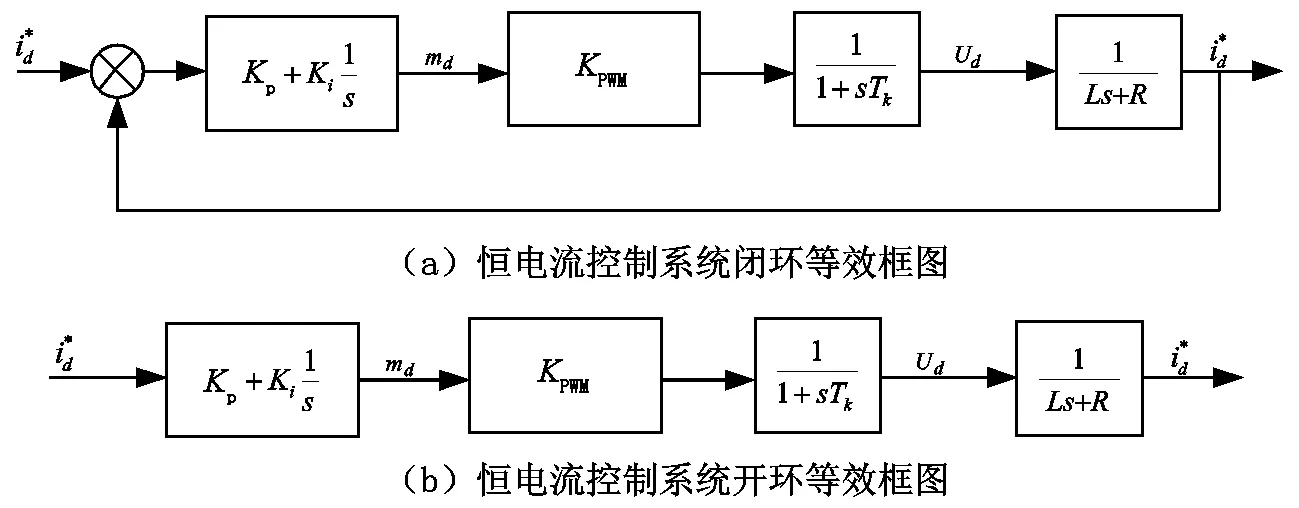
Gr(s)=1/(Ls+R)≈1/Ls,
Gdelay(s)=1/(1+sTk).

3 计算与验证
3.1 计算
3.2 仿真验证
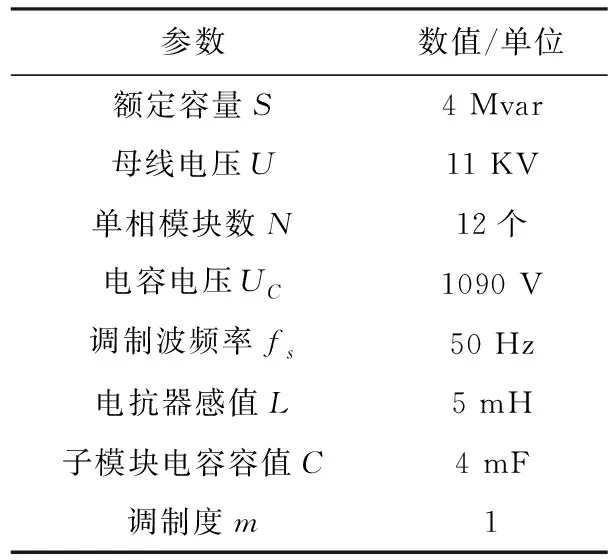
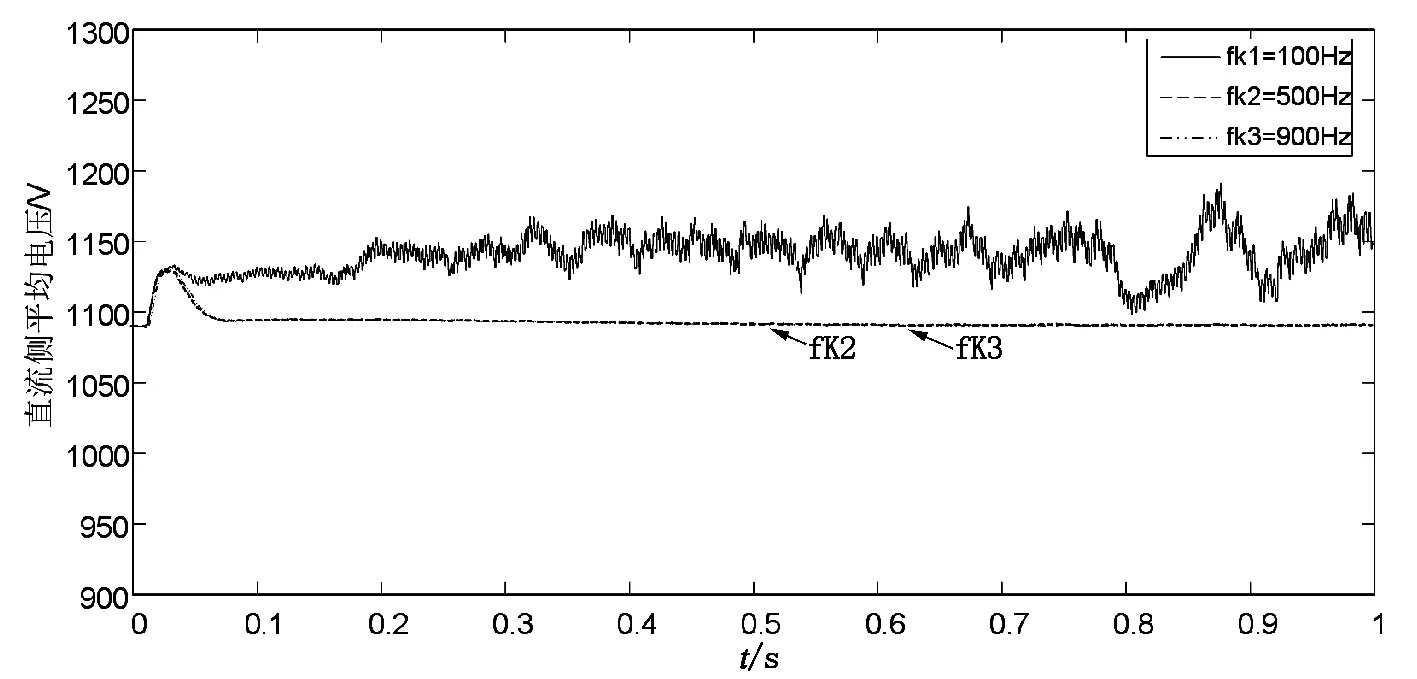

3.3 实验验证

4 结束语
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30心理学报(2022年7期)2022-07-09山东体育学院学报(2022年1期)2022-04-15中国舰船研究(2022年1期)2022-03-19防爆电机(2021年5期)2021-11-04皮肤病与性病(2021年3期)2021-07-30西安工程大学学报(2021年1期)2021-04-06科学导报·科学工程与电力(2019年22期)2019-10-21家庭影院技术(2018年9期)2018-11-02宇航总体技术(2018年5期)2018-10-15