
并网变换器电流重构模型预测容错控制
2021-06-05 09:13尚姝钰赵亚谦吕恒志李琰琰
电源学报 2021年3期
尚姝钰,赵亚谦,吕恒志,李琰琰,金 楠
(1.平顶山工业职业技术学院机械工程学院,平顶山 467001;2.郑州轻工业大学电气信息工程学院,郑州 450002)
近年来环境问题越来越得到人们的关注,而使用清洁新能源能有效改善环境。随着新能源并网的需要,并网变换器得到了广泛研究[1-5]。并网变换器的性能在新能源并网中起到至关重要的作用[3],当并网变换器出现故障时,就会影响到整个并网系统的运行,所以电力电子变换器的可靠性问题逐步成为研究热点,传统三相六开关并网变换器故障后重构为三相四开关TPFS(three-phase four-switch)容错结构,保障并网变换器桥臂开关故障后的容错运行[5]。
对于并网变换器的控制,传统控制方法包括线性PI 控制、无差拍控制等[6-8]。PI 控制对并网变换器的控制性能取决于PI 调节器的比例系数设计,但是比例系数没有成熟的计算方法;无差拍控制结构简单,但对于数学模型精度要求较高。为了进一步提高并网变换器的性能,近年来,非线性控制方法如模型预测控制由于控制策略简单、良好的鲁棒性、不使用脉冲宽度调制PWM(pulse width modulation)波调制等优点,得到了广泛研究与应用[9-13]。模型预测控制的主要特点是使用系统模型预测控制变量的未来变化。根据预先定义的最优化准则确定最优的操作方式[14]。
对于并网变换器来说,通常使用2 个电流传感器在网侧测量两相电流,然后计算出第三相电流。模型预测控制通过三相电流与电压的关系预测出下一周期最优的开关信号,控制并网变换器运行。但是当传感器出现故障时,电流信号缺失会导致控制策略失效,使得并网变换器无法正常运行[15]。针对电流传感器失效问题,文献[16]提出了交流电流间接计算技术,通过电流关系推算出三相电流,参与PWM 控制;文献[17]提出了一种利用直流电流重构三相电流的策略,使用直流侧电流传感器控制三相电压源PWM 整流器,但是需要改变接线方式。
对于桥臂与传感器双重故障下的并网变换器,本文提出一种基于电流重构的模型预测容错控制方法,实现容错并网运行。采样直流侧电流和故障相电流,并根据电压和电流关系计算出网侧三相输出电流。将重构后的电流用于容错并网变换器的模型预测控制,提高并网系统的容错能力。通过实验与仿真验证所提控制策略的有效性。
1 并网变换器容错建模
1.1 并网变换器容错结构
传统电力电子并网变换器具有三相六开关TPSS(three-phase six-switch)结构,考虑开关器件在电流冲击或尖峰电压下会出现故障,为维持桥臂故障下的容错运行,本文建立并网变换器容错拓扑结构如图1 所示。三相输出线路通过控制开关连接至直流侧电容中点,各个桥臂串联熔断器。当某相开关器件发生故障时,熔断器断开相应支路,控制开关接通故障相至直流电容侧中点,由电容电压构成虚拟桥臂,维持运行。假设并网变换器B 相桥臂故障,重构的三相四开关TPFS 结构如图2 所示,B 相输出连接至直流侧电容中点,通过控制剩余A、C相桥臂开关状态对变换器进行容错控制。

图1 并网变换器容错结构Fig.1 Fault-tolerant structure of grid-connected converter
1.2 并网变换器容错结构建模分析
对于并网变换器的容错结构,当B 相开关桥臂故障时,根据重构的TPFS 结构(图2),A、C 两相的开关状态信号Sm(m=a,c)控制如下

图2 重构的三相四开关结构Fig.2 Reconstruction of TPFS structure

A、C 两相开关有(0 0)、(0 1)、(1 0)、(1 1)4 种开关状态,B 相桥臂通过控制开关连接至直流电容侧中点,得到并网变换器相电压与开关状态的关系

式中:Van、Vbn、Vcn分别为输出相电压;Vdc为直流侧电压;Sa、Sc为A、C 两相开关状态。
并网变换器输出的空间电压矢量为

式中,a 为空间旋转因子。
利用Clark 坐标变换,得

则并网变换器容错模式在αβ 两相静止坐标系下的电压矢量与开关状态之间的关系如表1 所示,对应的电压矢量如图3 所示,由图可知,TPFS 结构输出4 个长度不等且非对称的空间电压矢量,控制难度加大。

表1 三相四开关电压矢量Tab.1 Voltage vectors of TPFS converter

图3 B 相故障下三相四开关空间矢量Fig.3 TPFS space vector under phase-B fault
1.3 并网变换器容错结构预测功率模型
由图2 所示的TPFS 结构和基尔霍夫电压定律,可得到三相四开关表达式为

式中:im、Vmn、em分别为m 相电流、相电压和电网电压;L 和R 分别为滤波电感和线路电阻。
经过坐标变换得到αβ 两相静止坐标下的状态方程

将式(6)离散化,得到下一采样时刻的电流为
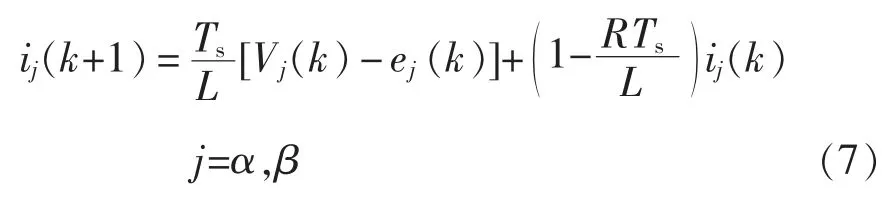
式中,Ts为采样周期。
根据瞬时功率理论,有功功率和无功功率为

将式(7)代入式(8),利用采样的上一时刻功率计算得到下一时刻预测功率,有

式中:P(k+1)和Q(k+1)分别为预测得到的k+1 时刻的有功功率和无功功率;P(k)和Q(k)分别为当前k 时刻计算的有功功率和无功功率。
2 基于电流重构的模型预测功率容错控制
2.1 基于三相四开关容错结构的相电流重构方法
当并网变换器发生桥臂故障时,并网变换器由传统的三相六开关结构重构为三相四开关结构进行容错控制,电流传感器用于测量交流和直流电流信号。并网变换器2 个交流电流传感器位置如图4 所示。
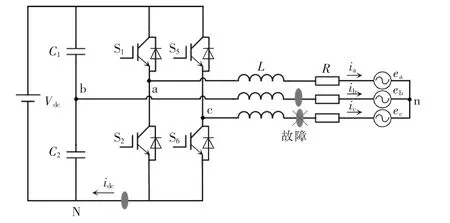
图4 三相四开关变换器C 相传感器故障Fig.4 Phase-C sensor fault of TPFS converter
图4 中B 相桥臂故障,C 相电流传感器失效,通过晶闸管Tb将B 相线路接至两直流电容侧中点继续构成回路。在B 相桥臂故障下,根据4 种不同开关状态(0 0)、(0 1)、(1 0)、(1 1),依次得出4 种开关状态下的容错结构与电流状态,如图5 所示。

图5 4 种开关状态下的容错结构Fig.5 Fault-tolerant structures in four switching states
图5(a)为开关状态V1(0 0)下,2 个下桥臂导通,2 个上桥臂截止,而故障相电流ib通过直流电容C1和B、C 相下桥臂形成通路,故直流侧电流idc和故障相电流ib相等,C 相电流ic(k+1)采用上一时刻的重构电流ic(k),再通过基尔霍夫电流定律计算出A 相电流为-idc-ic。
图5(b)为开关状态V2(0 1)下,A 相下桥臂导通配合C 相上桥臂导通,直流侧电流idc和A 相电流流向相反,所以A 相电流为-idc,根据采样的故障相电流ibn,由基尔霍夫电流定律重构出C 相电流为idc-ibn。
图5(c)为开关状态V3(1 0)下,A 相上桥臂导通配合C 相下桥臂导通,直流侧电流idc和C 相电流ic相反,C 相电流为-idc,根据采样的故障相电流ibn重构出A 相电流为idc-ibn。
图5(d)为开关状态V4(1 1)下,2 个上桥臂导通,下桥臂截止,故直流侧电流idc为0,采样故障相电流ibn和C 相上一时刻重构电流ic(k)重构出A相电流为-ibn-ic。重构后的三相电流如表2 所示。

表2 重构三相电流Tab.2 Reconstructed three-phase currents
根据并网变换器容错结构模型和相电流重构方法可知,当某相桥臂故障时利用熔断器断开故障桥臂,将故障相连接至直流电容侧中点,其余两相桥臂正常工作,使得三相六开关结构变成三相四开关结构继续运行,保证桥臂故障后的容错运行。当某相电流传感器故障情况下,根据容错结构下直流电流与输出电流关系,由直流侧电流传感器测量的母线电流idc和未故障相电流进行电流重构,再利用重构电流进行容错控制。因此,电流重构是根据桥臂故障容错结构和交直流电流关系得到的,只有当桥臂故障和传感器故障同时发生时才能进行有效控制,即容错控制具有唯一性。
2.2 基于电流重构的模型预测容错控制
传统模型预测功率控制所使用的电流为网侧两相电流(计算出的第三相电流),需要在网侧两相分别安装电流传感器。当某相传感器故障时,为了维持传感器故障下继续运行,本文采用重构电流继续进行模型预测控制。当网侧电流传感器故障时,用图5 所示的电流重构方法,重构出三相电流,继续对并网变换器进行控制,见图4。
基于电流重构的模型预测容错控制结构如图6 所示,网侧采集的交流电压ea、eb、ec和计算重构后的三相电流ia、ib、ic经Clark变换得到交流电压eα、eβ和交流电流iα、iβ作为预测函数式(9)的输入,Vdc为直流侧电压,Vα、Vβ为电压矢量经过Clark 变换下得到的电压,选取代价函数为

式中:P(k+1)和Q(k+1)分别为预测函数的有功功率和无功功率;P*和Q*分别为给定的有功功率和无功功率的参考值。
依次把4 种开关状态所对应的参数代入式(10),得到代价函数最小值所对应的开关状态应用到下一周期。
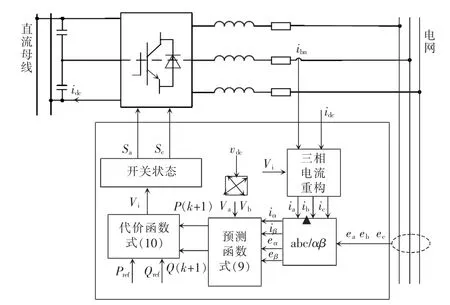
图6 基于电流重构的模型预测容错控制结构Fig.6 Model predictive fault-tolerant control structure based on current reconstruction
3 仿真结果
为了验证所提的基于电流重构模型预测控制容错变换器的有效性,在Matlab/Simulink 环境下进行了仿真,系统参数如表3 所示。

表3 仿真与实验参数Tab.3 Simulation and experimental parameters
3.1 稳态仿真
图7 为变换器在B 相故障情况下,给定功率Pref=1 kW、Qref=0 var 时,重构电流iar、icr与电网侧输出电流ia、ic及其差值wa、wc的仿真波形。

图7 重构电流与实际输出电流Fig.7 Reconstruction currents and actual output currents
图7(a)中,ia是A 相输出侧的电流,iar是通过重构算法得到的A 相重构电流,可以看出,A 相电流重构效果良好,与实际电流基本重合,重构电流与输出电流的差值wa幅值不超过0.3 A,重构电流iar接近ia,图7(b)中C 相重构电流icr与实际电流ic基本重合,其误差wc幅值低于0.5 A。
图8 为变换器在B 相故障的情况下,给定功率Pref=1 kW、Qref=0 var 时的稳态仿真波形,其中图8(a)是容错变换器电网侧输出电流ia、ib、ic的仿真波形,图8(b)是容错变换器三相重构电流iar、ibr、icr的仿真波形。结果表明,并网电流重构效果良好,电流总谐波失真THD(total harmonic distortion)为1.94%。重构电流与输出电流相比,THD 略有上升,电流THD为2.04%,重构电流的控制效果良好。

图8 B 相故障时稳态仿真结果Fig.8 Steady simulation results under phase-B fault
3.2 动态仿真
为验证容错变换器的动态性能,给定初始功率Pref=1.2 kW、Qref=0 var,0.5 s 时改变给定有功功率Pref=0.8 kW,B 相故障时动态仿真结果如图9 所示。当Pref=1.2 kW 时,并网电流波 形良好,THD 为1.6%;0.5 s 时有功功率Pref跳变至0.8 kW,电流快速稳定,THD 为2.4%;输出功率变化平稳。仿真结果表明,并网变换器动态性能良好,验证了控制策略的有效性。

图9 B 相故障时动态仿真结果Fig.9 Dynamic simulation results under phase-B fault
4 实验验证
为了验证所提基于电流重构模型预测控制容错变换器的有效性,搭建了一套三相并网变换器实验平台,如图10 所示。实验设备主要包括:可调直流电源APL-II、可编程交流电源AMETEKMX-30 和由TMS320 F28335 控制的变换器硬件实验台。实验参数如表3 所示。
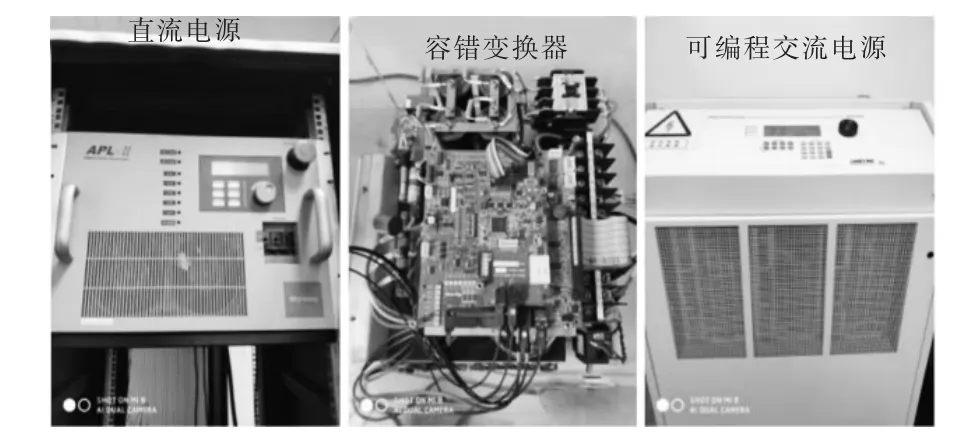
图10 三相四开关容错变换器实验平台Fig.10 Experimental platform of TPFS fault-tolerant converter
4.1 稳态实验
在B 相故障情况下,图11 给出了基于电流重构容错并网变换器模型预测控制下重构电流与电网输出电流的关系,图11(a)中的ia是A 相输出侧的电流,iar是通过重构算法得到的A 相重构电流,图中表明,A 相电流重构效果良好,重构电流与采样电流基本重合,重构电流iar接近ia。图11(b)中C相重构电流icr接近并网电流ic,重构电流与实际输出电流误差较小,表明重构电流接近实际电流,验证了电流重构方法的有效性。
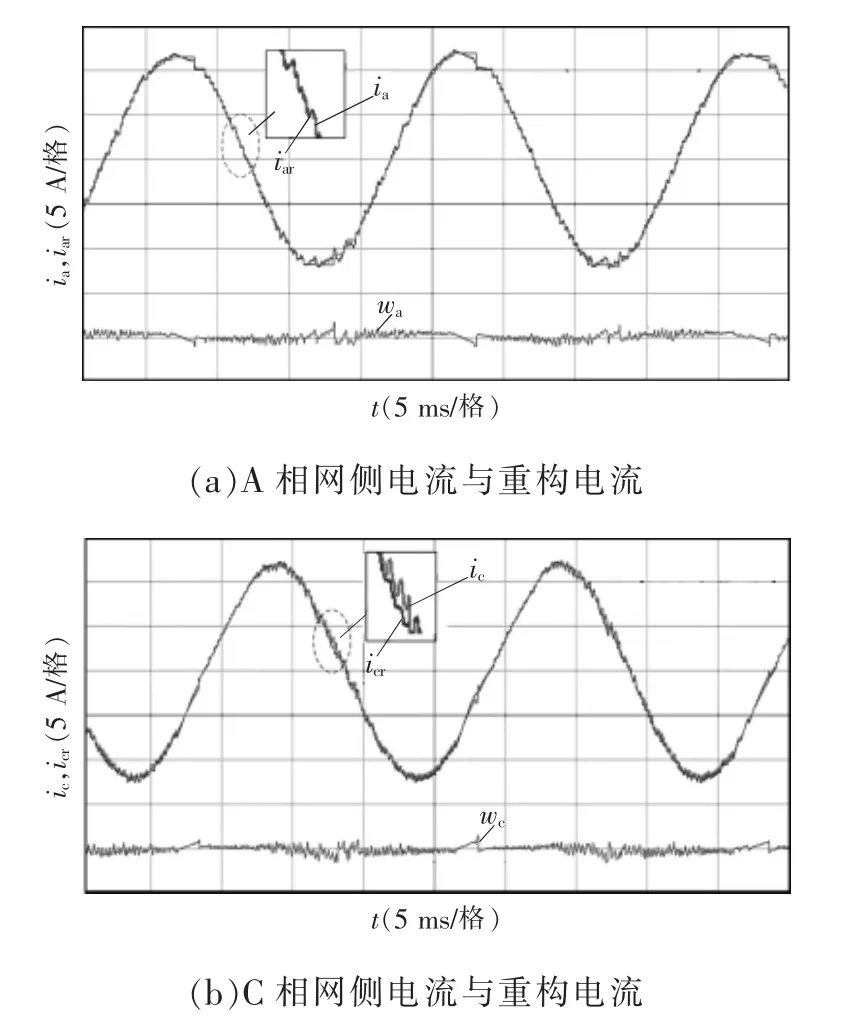
图11 A 相与C 相重构电流与实际电流Fig.11 Reconstruction currents and actual currents in phases-A and phases-C
给定有功功率Pref=1 kW、无功功率Qref=0 var 时,容错变换器处于稳态工作情况,三相并网电流与输出功率实验波形如图12 所示。图中电网侧输出电流ia、ib、ic正弦度良好,电流THD 为3.5%,满足并网要求,输出功率平稳,能够保证容错状态下系统的连续运行,验证了所提出的基于电流重构模型预测方法的良好稳态效果。
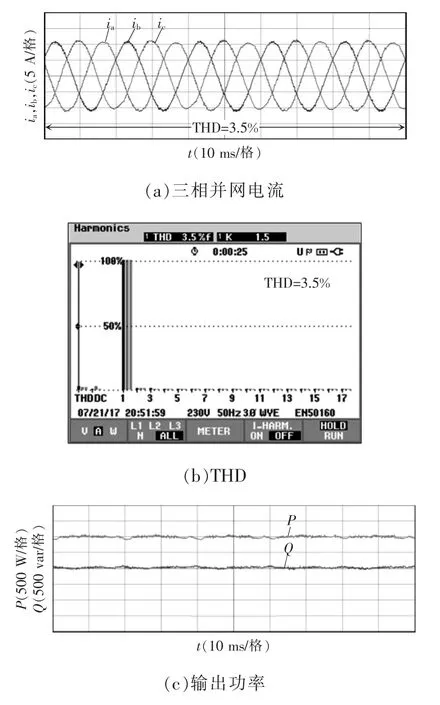
图12 B 相故障时稳态实验结果Fig.12 Steady experimental results under phase-B fault
4.2 动态实验
为了进一步验证本文所提方法的动态性能,进行如下动态实验:改变其参考有功功率,给定初始功率Pref=1 200 W、Qref=0 var,有功功率跳变至Pref=800 W。B 相故障时的动态实验波形如图13 所示。三相并网电流正弦度良好,无冲击与严重畸变,THD 由2.9%升至6.4%,有功功率与无功功率快速跟踪参考值。实验结果表明,容错变换器动态性能良好,进一步验证了控制策略的有效性。

图13 B 相故障时动态实验结果Fig.13 Dynamic experimental results under phase-B fault
5 结语
针对三相四开关容错变换器,提出一种基于电流重构的模型预测功率控制策略。通过建立容错三相并网变换器在αβ 两相静止坐标下电压状态方程,得到了功率预测表达式。当变换器发生桥臂故障且交流传感器失效时,利用电压矢量与电流关系,重构三相电流,参与容错变换器的模型预测控制。稳态和动态的仿真与实验的结果表明,当B 相桥臂故障和C 相电流传感器故障情况下,有功功率Pref=1 kW、无功功率Qref=0 var 时,变换器稳态工作情况下重构的电流与采样的电流误差不超过0.5 A,电流THD 为3.5%。当参考功率发生变化,即变换器动态工作情况下电流也能快速跟踪功率的变化。因此在本文提出的基于电流重构模型预测功率控制下,并网变换器能够实现开关桥臂与电流传感器双重故障下的容错连续运行,并具有良好的稳态和动态性能。
猜你喜欢
科技创新导报(2022年17期)2022-09-22
微电机(2022年1期)2022-03-21
防爆电机(2020年5期)2020-12-14
哈尔滨铁道科技(2020年4期)2020-07-22
中国实用神经疾病杂志(2018年9期)2018-05-25
电气传动(2015年4期)2015-07-11
电测与仪表(2015年12期)2015-04-09
电源学报(2015年6期)2015-02-18
中国医药导报(2015年20期)2015-01-11
电测与仪表(2014年21期)2014-04-04
