
水下浮游爬行式机器人结构设计与研究
2021-06-04 02:20:48翟旭强张俊俊王皓冉李永龙2李佳龙
制造业自动化 2021年5期
翟旭强,张俊俊,王皓冉,李永龙2,,李佳龙
(1.西南科技大学 制造科学与工程学院,绵阳 621010;2.西南科技大学 特殊环境机器人四川省重点实验室,绵阳 621010;3.清华四川能源互联网研究院,成都 610000)
0 引言
有缆遥控水下机器人(Remote Operated Vehicle,ROV)越来越多地应用于海洋探测、水库大坝检测、水产养殖、船体码头检查、水下考古等领域,根据运动方式的不同,ROV可以分为浮游式、爬行式和拖曳式[1]。浮游式ROV最为常见,可实现多自由度灵活运动,但是在对水下底板执行取样、巡检、探测等任务时,保持悬停和姿态稳定比较困难。爬行式ROV可以在水下紧贴底板进行作业但收放困难。因此,结合浮游式ROV灵活性和爬行式ROV稳定性的优势,设计开发具备浮游和爬行功能的复合式水下ROV,具备一定的应用价值和研究意义。
Bo等[2]设计了浮游爬行式ROV,通过浮游功能进行水下电缆的搜索、观测和检测,采用爬行功能来实现电缆的埋设和维护。Wood等[3]设计了双模式ROV来进行水下考古,并对机器人框架进行了有限元仿真以保证其强度满足要求,设计浮力升降系统来调整机器人水下的浮力。Ferreira等[4]设计双模式ROV,采用推进器来施加垂直于船体表面的力,从而紧贴在船体上爬行。Mori等[5]研究具备浮游、底板爬行和爬侧壁三种功能的水下机器人,并且进行了浮游越过障碍物和由爬行转换为爬壁的姿态控制研究。常路等[6]设计了双模式水下ROV,通过切换模块在浮游爬行两个模式之间进行切换。以上水下浮游爬行式ROV的研究主要集中在浮游姿态控制上,而对水下爬行性能的研究较少。Inoue等[7,8]对水下履带式机器人在平坦地形的行驶进行了行驶稳定性研究,并且在小型的浮游爬行式ROV上使用四个推进器来辅助增加水下质量,调整水下质心,以保证其稳定运行。但是仅对水平地面的运动进行了研究,未对爬坡等工况进行分析。
本文设计的机器人为“浮游式+爬行式”双模式ROV,可以实现水下底板连续爬行与水中六自由度浮游作业。机器人水下质量小,履带接地长度短、水下质心较高,行进中受到水动力的作用,底板爬行时存在倾翻的风险。对重心与浮心的可行域进行仿真和验证,保证ROV行驶的稳定性是设计的重点。本文对机器人直行、上下斜坡的典型工况进行了稳定性分析和动力学仿真研究,并通过实验验证了结构设计的合理性。
1 ROV结构设计
1.1 整机构型
ROV由主控装置、浮游装置、检测装置、前置摄像装置、爬行装置等组成,整体结构如图1所示。
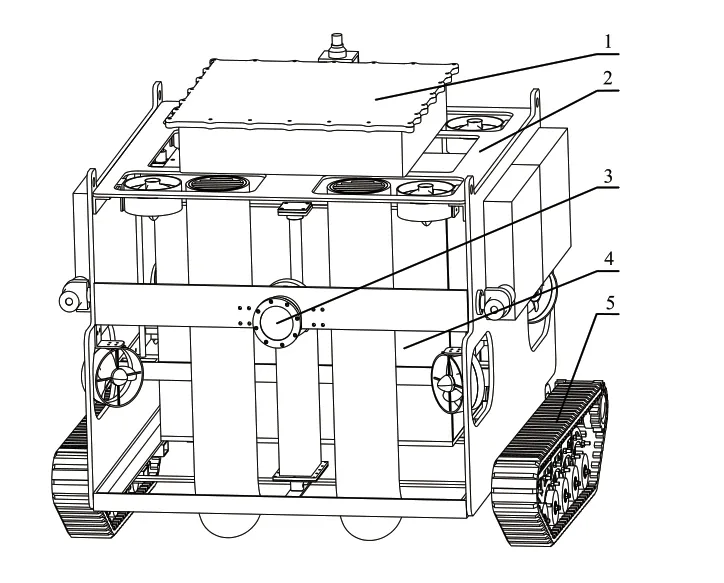
图1 机器人整机结构
机器人采用有缆供电通讯的方式,操作人员在母船上通过电缆对机器人传递信息,进行遥控操作。主控箱安装在机器人正上方以方便箱体的安装、接线和箱体安装完成后的气密性测试。浮游装置采用框架式结构,搭载推进器使得机器人可以浮游运动。使用履带式底盘作为爬行部件,履带底盘安装在车体两侧,履带之间有较大的间距保证了机器人行驶和转向时的侧向的稳定性。前置探照装置由水下相机和补光灯组成,可以采集得到前方的路况图像。检测装置是在装满清水的透明水箱中安装水下高清相机和补光灯,相机朝机器人正下方进行拍摄,采集底板的图像。
1.2 爬行装置设计
爬行装置如图2所示,采用履带式底盘作为行走机构,牵引性能良好,对地压力小,有较强的地形适应性且不容易打滑。爬行装置由两组履带模块和传动模块,以及安装架组成,履带模块由履带机架、驱动轮、张紧轮、负重轮、张紧装置等组成,采用克里斯蒂悬挂系统,降低对车身的振动。

图2 爬行装置
履带传动装置如图3所示,直流减速电机为履带底盘提供动力,通过电机外壳与机架固定,电机外壳与端盖之间采用O型圈实现静密封。水下执行装置需要着重考虑动力系统的密封性,从而实现机构的连续稳定运行[9]。本传动系统中主要考虑电机输出轴的动密封,直接对电机轴密封难度较大,因此对传动轴进行机械密封,传动轴与电机轴通过联轴器联接。法兰轴连接履带主动轮,法兰轴与传动轴通过销钉联接。

图3 履带传动装置
1.3 浮游装置设计
浮游装置由主体、推进器、浮力块等组成。机器人主体为比强度较高的碳纤维板,采取框架式结构并做适当切除,以避免遮挡推进器的流场,主体上设计4个吊耳以方便吊放。采用定向推进器作为浮游运动的动力来源,八个推进器的配合使得机器人能在水下三维空间中实现进退、横移、浮潜、横摇、纵摇、艏摇的六自由度运动[10]。通过调整浮力块来改变水下浮力和浮力中心。

图4 浮游装置
ROV具备浮游功能,可以在水下任意位置升降,方便机器人收放;在遇到不可爬行越过的障碍物时,可以直接上浮然后“飞”过障碍物。
2 机器人爬行稳定性分析
机器人在水下水平地面和斜坡上运动时受到自身重力G、浮力B、支持力N以及水动力Rw的作用。假设G、B、N、Rw为点作用力,运动时履带为刚性,与地面接触部分形状固定。机器人左右两侧对称,可简化为平面问题,此时机器人受力如图5所示。
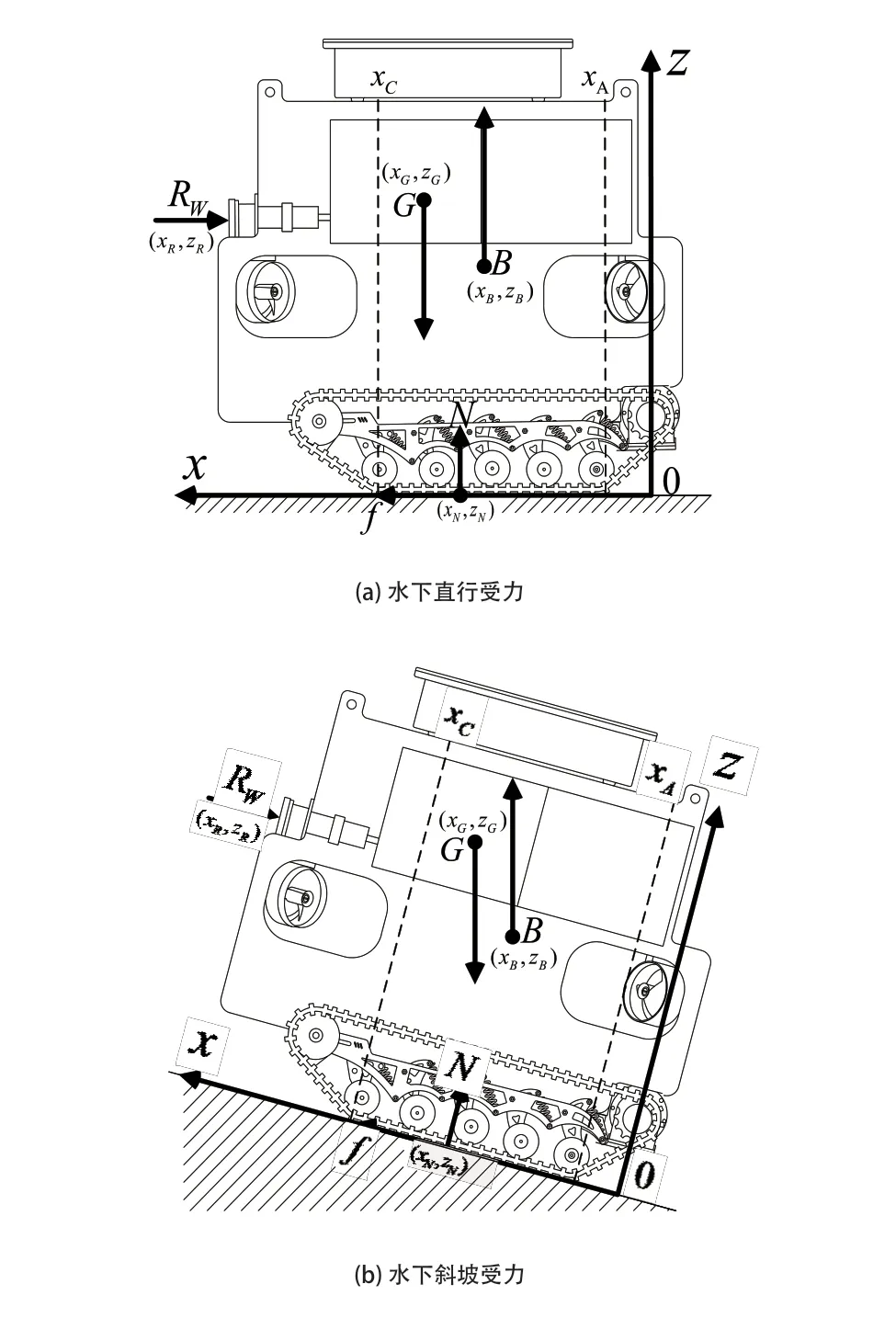
图5 机器人直行和斜坡工况受力
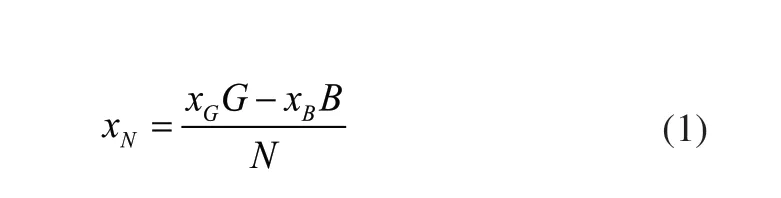
根据力矩平衡原理,以原点为计算点,机器人静止时,水下支持力的等效作用点横坐标为:
机器人保持平衡需要满足支持力作用点横坐标xN与履带地面接触接触范围(xA,xC)之间的关系为:

水的密度远大于空气密度而且迎水面积较大,水动力对机器人爬行性能的影响不可忽略[11],运动时,水动力的大小为:

其中:ρ是水密度;Ks是水阻力系数;Aw是水阻力面积;vw和vm分别是机器人水下行驶速度和水流速度;Km是附加质量系数;Vm是机器人体积;aw和am分别是机器人行驶加速度和水流加速度。
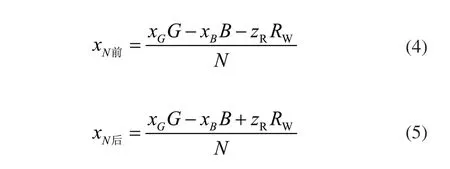
机器人匀速向前和向后运动时,水下支持力作用点的横坐标分别为:
式(2)、式(4)、式(5)联立,水下直行时,机器人平衡条件为:

机器人向上、下爬坡时,水下支持力作用点的横坐标分别为:
结合式(2),此时zB与xB的关系为:
假设水阻力作用在机器人正前方投影平面的面心上;RW1为运行中所受的最大水阻力;RW2为运行中所受的最小水阻力。
机器人左右对称,通过调整浮力块的位置,调整浮心的x轴和z轴坐标位置。采用悬挂法通过力矩平衡原理进行的x轴和z轴的重心测量和浮心的调整[7]。机器人质量、浮力、重心坐标等相关参数如表1所示。
表1 机器人设计参数
机器人在水下处于负浮力状态,因而它能贴水底爬行。机器人的质量、质心、浮力、浮心和水阻力等会影响其运动姿态。采用CFD方法计算Ks和Km,当机器人以速度为0.07m/s,加速度为0.1m/s2时其水动力最大,为4.35N。机器人运动指标如表2所示。
表2 机器人运动参数
根据式(6)的水下直行的平衡条件,浮心横坐标xB与质心横坐标xG的关系如图6(a)所示。其中A区域为xG的可行域,在此范围内支持力在履带底部的接地面上,机器人能平稳运动。
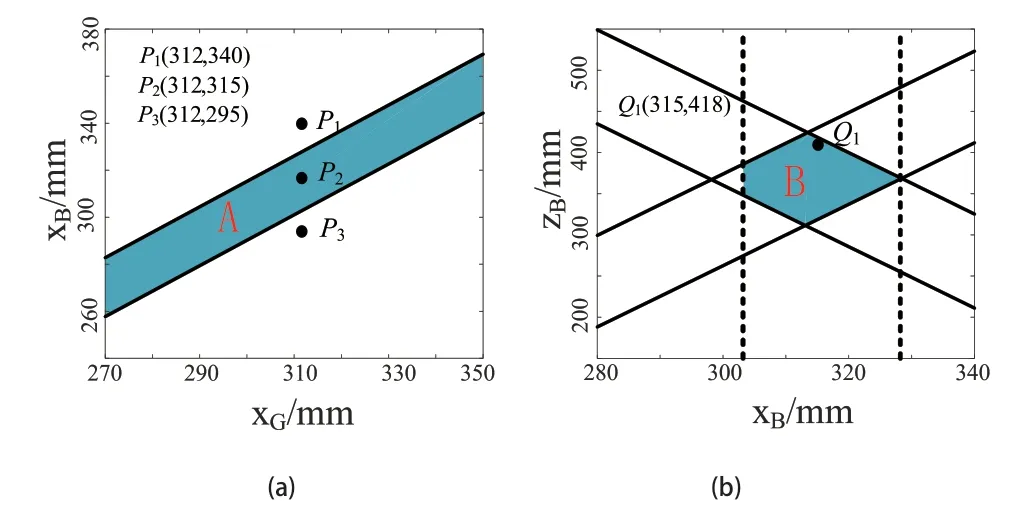
图6 直行和斜坡爬行稳定域
根据式(8)和式(9),当机器人向上或者向下通过倾角为15°斜坡时,在给定质心坐标(312,375)下,浮心横坐标xB与浮心纵坐标ZB的关系如图6(b)所示,其中B区域为浮心可行域。
3 多体动力学建模仿真
3.1 动力学建模
水下机器人履带系统的结构较复杂,自由度多。为提高求解速度,根据机器人结构参数,使用Recurdyn/LM模块构建履带系统。使用SolidWorks构建车体的三维模型,将车体三维模型导入Recurdyn中并定义车体和履带系统的约束关系[12]。机器人多体动力学模型如图7所示。

图7 机器人多体动力学模型
3.2 运动仿真
进行水下机器人在底板的直行、爬坡等典型工况的动力学仿真。设置地面为典型黏性土,采用translation力来定义垂直向上的浮力和与运动方向相反的水阻力。采用STEP函数定义驱动轮的转速为0.07m/s。选取水平地面运动,向上爬15度斜坡,向下爬15度斜坡三种典型工况对机器人进行仿真分析。机器人在水下水平地面运动时,同一速度不同浮力中的质心高度和运动所需的驱动力矩变化情况如图8所示。
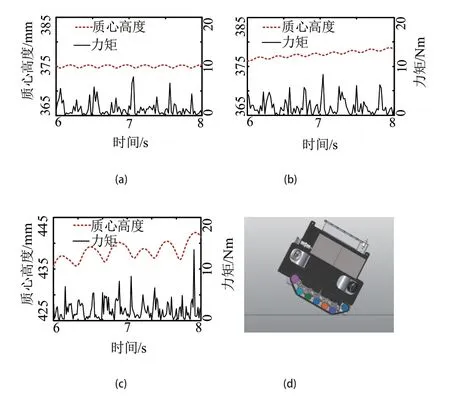
图8 水平运动质心高度和驱动力矩
质心横坐标xG为312mm时,选取浮心横坐标xB分别为315mm,295mm和340mm(图6(a)中点P2,P1,P3)进行仿真,仿真结果分别如图9(a)~图9(c)所示。仿真开始时,由于机器人离地10mm,其落下后有一定的振动,取6~8秒振动结束后进行分析。图8(a)为机器人质心横坐标xG为315mm即在浮心稳定区间时的仿真结果,其质心高度zG稳定在375mm附近,机器人不会向前或者向后倾翻。图8(b)和图8(c)为浮心横坐标xB分别为295mm和340mm即在稳定区间以外时的仿真结果,此时质心高度呈明显上升趋势,仿真中发现机器人单轮着地,与地面的接触情况如图8(d)所示,机器人俯仰角变大,存在倾翻的危险。
选取图6(b)中稳定区间内,机器人浮心坐标Q(315,418)进行爬坡分析。机器人向上爬15度斜坡时,质心高度与力矩变化情况如图9(a)所示。机器人向下爬15度斜坡时,质心高度与力矩变化情况如图9(b)所示。两种工况下俯仰角的变化都很小,机器人均可正常稳定爬行。
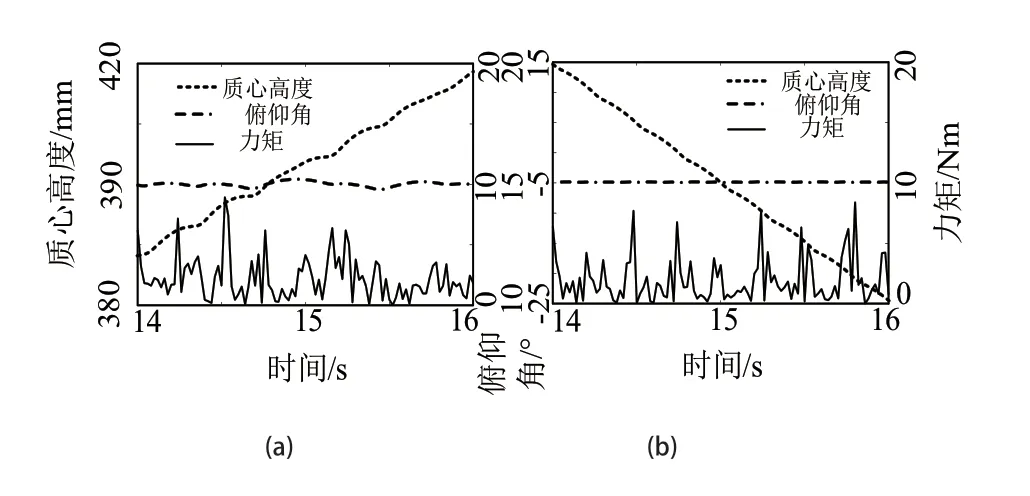
图9 机器人上下斜坡仿真
4 样机实验
机器人样机水下场景如图10(a)所示,水下爬行的实验如图11(b)所示。实验场地为2m×5m的水池,实验时水深为1.3m。
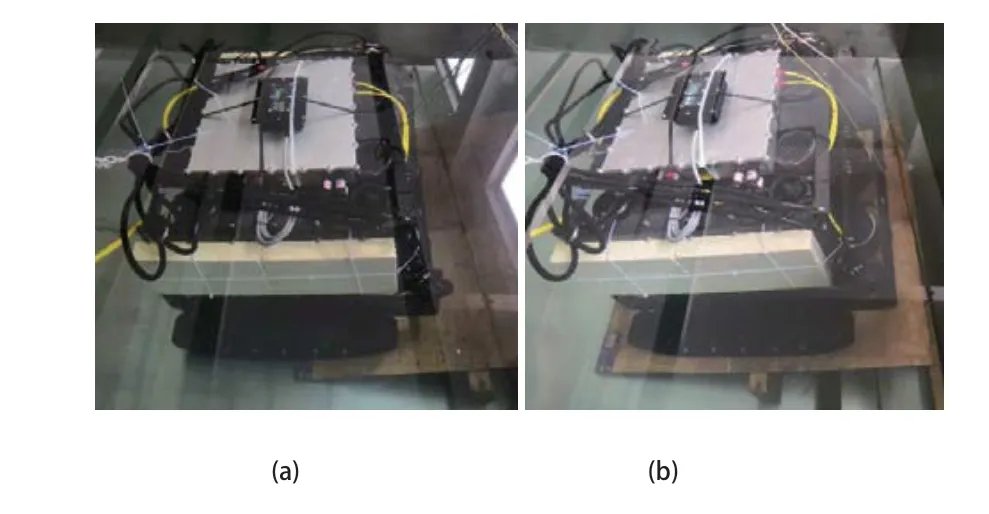
图10 水下样机实物与爬坡实验
机器人在水池底板上爬行,底板有平地和18.3°斜坡两种地形。机器人在水下底板上以最大速度向前行驶,采用惯性测量单元IMU采集机器人运动时的角度和加速度信息。此时前进方向加速度和俯仰角变化情况如图11所示。
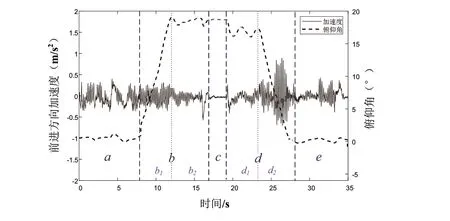
图11 爬坡时加速度和俯仰角变化
a阶段机器人在水下平地向前爬行;b阶段机器人以最大速度向上爬18.3°的斜坡,其中b1阶段为机器人从底盘前端接触斜坡到底盘完全爬上斜坡的过程,此时机器人的俯仰角从0°提升到18.3°,b2阶段机器人完全在斜坡上从运动到静止,此时其倾角和加速度存在小范围波动;c阶段机器人在斜坡上静止;d阶段机器人从静止加速,后退爬下斜坡,其中d1阶段在斜坡上由静止加速到最大速度行驶,机器人产生震荡,d2阶段机器人逐渐脱离斜面,此时俯仰角不断变小;e阶段为机器人在水下平地上以最大速度行驶。机器人顺利完成平地直行、上下斜坡的运动且运动中无倾翻。
5 结语
1)设计了一款“浮游式+爬行式”双模式水下巡检机器人。机器人可以通过履带底盘在水下底板进行连续爬行作业,并且具备浮游功能,可以在水中六自由度游动。
2)基于力矩平衡原理研究质心和浮心对机器人水下直行和爬坡性能的影响,并求出满足两种运动的车体浮心可行域。针对运动需求和特性,使用动力学仿真软件Recurdyn对机器人进行典型工况下的运动仿真分析。通过仿真可以观察到机器人质心和俯仰角的变化情况,平地直行和上下斜坡两种工况下,在浮心可行域内机器人平稳运行。
3)开展样机测试,试验表明:在浮心稳定区间内,机器人平地直行稳定无倾翻迹象;机器人能爬18.3°斜坡并稳定运行,满足设计指标。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
初中生学习指导·中考版(2022年3期)2022-03-25 16:05:28
中国石油石化(2021年8期)2021-03-30 12:39:14
潍坊学院学报(2020年2期)2021-01-18 07:02:00
新课程·上旬(2020年36期)2020-12-29 12:05:39
中学生数理化·七年级数学人教版(2020年4期)2020-08-10 09:24:30
石油化工建设(2019年6期)2020-01-16 08:03:42
流行色(2019年10期)2019-12-06 08:13:26
环境科技(2016年2期)2016-11-08 12:18:22
橡胶工业(2015年4期)2015-02-23 23:29:38
