
High-adaption locomotion with stable robot body for planetary exploration robot carrying potential instruments on unstructured terrain
2021-06-04 07:29KangXUShoukunWANGJunzhengWANGXiuwenWANGZhihuaCHENJingeSI
CHINESE JOURNAL OF AERONAUTICS 2021年5期
Kang XU, Shoukun WANG,*, Junzheng WANG, Xiuwen WANG,Zhihua CHEN, Jinge SI
a School of Automation, Beijing Institute of Technology, Beijing 100081, China
b Key Laboratory of Intelligent Control and Decision of Complex System, Beijing Institute of Technology, Beijing 100081, China
c Key Laboratory Ministry of Industry and Information Technology, Beijing Institute of Technology, Beijing 100081, China
KEYWORDS Attitude control;Gait generation;High-adaption locomotion;Obstacle avoidance;Planetary exploration robot
Abstract There is a strong demand for Planetary Exploration Mobile robots (PEMRs) that have the capability of the traversability, stability, efficiency and high load while tackling the specialized tasks on planet surface. In this paper, an electric parallel wheel-legged hexapod robot which has high-adaption locomotion on the unstructured terrain is presented.Also,the hybrid control framework, which enables robot to stably carry the heavy loads as well as to traverse the uneven terrain by utilizing both legged and wheeled locomotion,is also proposed.Based on this framework,robot controls the multiple DOF leg for performing high-adaption locomotion to negotiate obstacles via Gait Generator(GG).Additionally,by using Whole-Body Control(WBC)of framework,robot has the capability of flexibly accommodating the uneven terrain by Attitude Control(AC)kinematically adjusting the length of legs like an active suspension system,and by Force/torque Balance Control(FBC)equally distributing the Ground Reaction Force(GRF)to maintain a stable body.The simulation and experiment are employed to validate the proposed framework with the physical system in the planetary analog environments. Particularly, to smoothly demonstrate the performance of robot transporting heavy loads, the experiment of carrying 3-person load of about 240 kg is deployed.
1. Introduction
For the further scientific exploration of planets (e.g., moon and Mars), many types of Planetary Exploration Mobile Robots (PEMRs) are deployed on the planetary surface to undergo various exploration missions.1-3These robots are usually used as a carrying platform to transport the instruments with multiple locations of scientific interest like rocks and crevasses instead of just landing location.4For example,on lunar and Martian surface, however, the planetary surfaces are covered with steep slopes and loose soil,5which places higher requirements on the traversability, stability and even load capacity of PEMRs motion.
In terms of constructed planetary exploration robots including wheeled and legged robots, the wheeled rover has the advantage of speed and efficiency over other robots. In particular for the wheeled hexapod robots, featuring as better stability and flexibility,are widely applied in planetary investigation. The cascade-based PEMRs, such as Rocky 7,6Spirit,7Opportunity,8CAST-HIT,9and MR-2,10were employed on lunar or Martian surface to achieve their scientific goals.These rovers which adapt rocker mechanism structure can always keep contact with ground so that getting a relative stability.The better performance of them on stability and mobility facilitates the development of planetary exploration. But this kind of robots is not suitable for high-speed driving and taking high heavy loads due to structural rigidity and strength limitations.11
Legged robot has the advantage of obstacle-negotiation flexibility on the challenging terrain, compared to the wheeled robot. An active compliant hexapod legged robot DLR Drawler12and a spider-like robot HITCR II13are developed to stably walk over the irregular terrains.The parallel hexapod robot Octopus II14is capable of walking over the high steep steps or even loose-sand ground while taking the loads. The capability of traversability and stability of legged robots offers a possibility to the further planetary exploration. But the limitation of motion efficiency and speed is inevitable for them.
Wheel-legged robot that combines the best of both worlds(i.e.,wheeled and legged robot)into a system seems to address the problems in terms of the advantages on traversability, stability and efficiency. For instance, a Mars analog multi-mode traverse hybrid rover (MAMMOTH)15,16and a planetary exploration rover SherpaTT17are applied on a planetary analog surface to actively conform to the terrain for increasing the traversability and efficiency. Additionally, an electric parallel wheel-legged robot is developed to walk and drive over step with stability and efficiency.18-20But for these wheel-legged prototypes,few researches disclose the load capacity of robots apart from traversability, stability and efficiency as it is a very significant capability to PEMRs. Thus, it is necessary for a PEMR to be capable of negotiating the obstacles with stability and efficiency as well as taking the heavy loads on the challenging terrain.
To this end,an electric parallel wheel-legged hexapod robot is proposed, which not only has multiple obstacle-negotiation locomotion with efficiency, but also maintains a stable pose when bearing the loads. In this paper, the main contributions are highlighted as follows:
(1) A novel parallel wheel-legged hexapod robot is developed,which can traverse the challenging terrain via multiple locomotion while keeping a leveled body.
(2) The hybrid control framework of this hexapod robot is proposed so that utilizing the proposed Gait Generator(GG) and Whole-Body Control (WBC) enables the robot to have the high-adaptation locomotion and the ability to maintain stability in a variety of environments.
(3) The effectiveness and feasibility of the proposed robot and control framework are validated by simulation and experiment. Especially, the experiment of tackling the heavy-duty task,namely,carrying 3 persons of about 240 kg, is conducted in outdoor environment.
The rest of this paper is organized as follows. In Section 2,the wheel-legged robot mechanism and the system model of the robot are presented. The control framework consisting of GG and WBC is demonstrated in Section 3.In Section 4,a series of simulations and experiments are carried out to further validate the hybrid control framework with the physical system in indoor and outdoor experiments. Finally, conclusions are made to summarize the main work of this paper in Section 5.
2. Robot system composition and modeling
2.1. Robot system
An electric parallel wheel-legged hexapod robot, called BITNAZA-II, is presented in Fig. 1. This robot can be split into 6 wheel-legged mechanisms, environment awareness system and battery management system. As for the wheel-legged mechanism, it is equipped with 6 six-degree-of-freedom (6-DOF) parallel platforms as legs that tightly integrate additional DOF wheels. The main performance parameters of robot are listed in Table 1.
BIT-NAZA-II has various sensors including binocular CCD, LiDAR, GPS, Integrated Navigation System (INS),force/torque sensor and IMU, which are depicted as Fig. 2.The host computer of overall control system is an industrial computer that runs ROS.
The external environment information is obtained by sensors (e.g., binocular CCD, LiDAR) and processed by host computer. The body posture (roll, pitch and yaw) is measured by IMU via UART. The information of obstacle and road is transmitted to the host computer via an Ethernet connection.The command from user or remote-control unit is transmitted to the 6 controllers of parallel leg-wheel mechanisms through the UDP. The main CPU is PC/104 by SBS, and every motor has its own encoder.
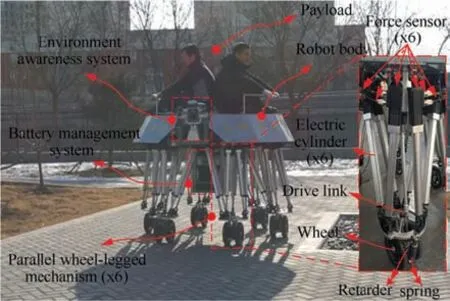
Fig. 1 Electric parallel wheel-legged hexapod robot (BITNAZA-II).
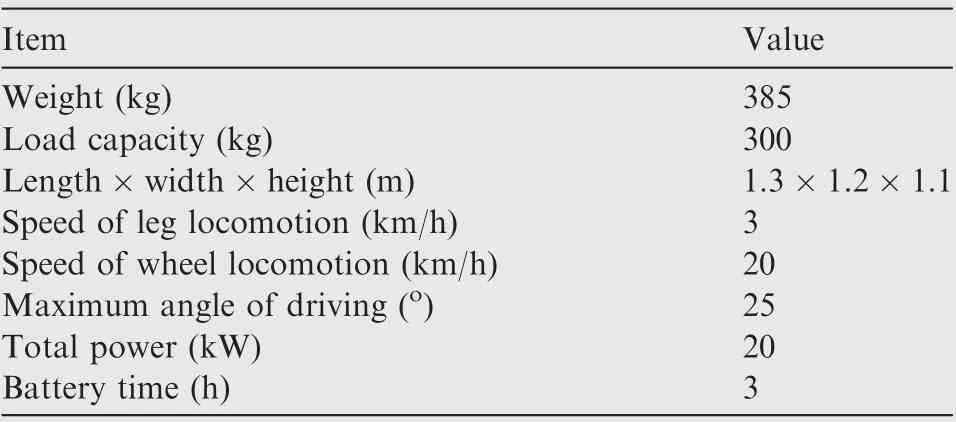
Table 1 Main parameters of BIT-NAZA-II.
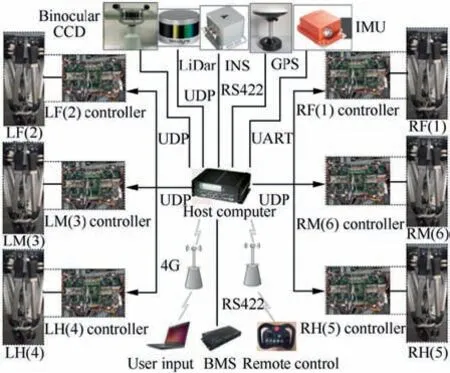
Fig. 2 Control system composition of robot.
2.2. Robot modeling
The wheel-legged robot can be modeled as a floating-based multibody system21,22with a generalized coordinate vector q,which is defined as
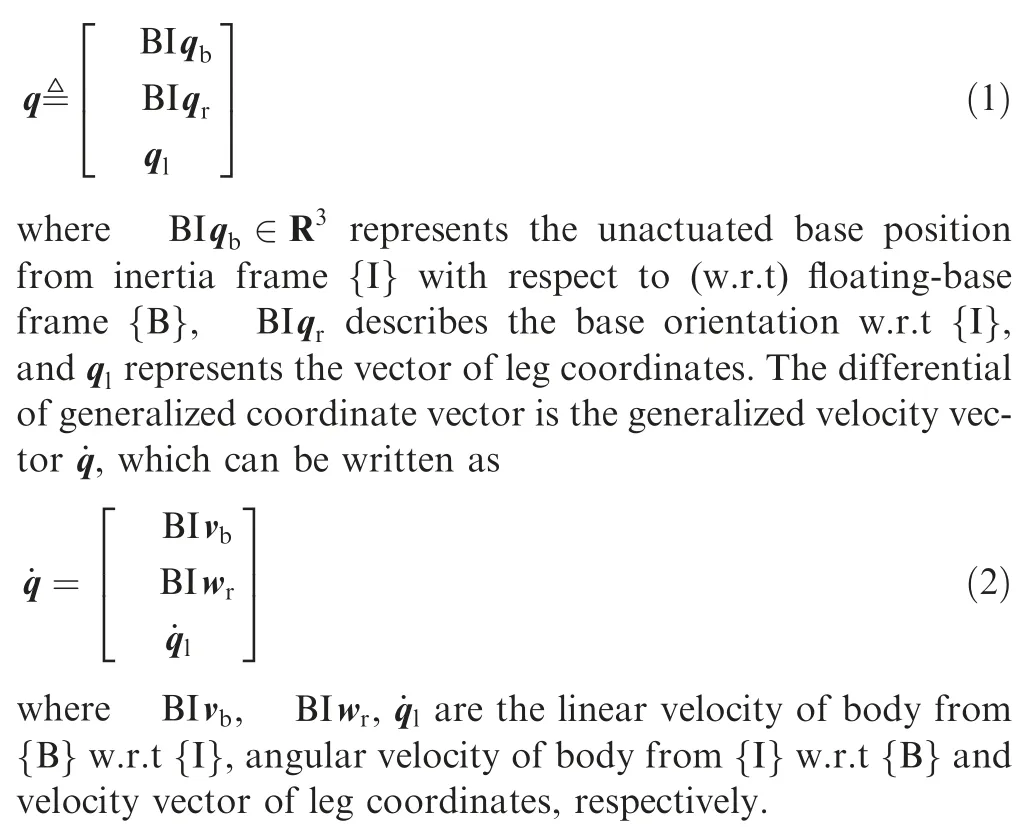
The kinematic of robot body can be represented by q and the leg lengths ξ. Based on these parameters, a random position of robot body P,BrP, and the origin point OBin {B },rOB, can be described as

where RBIrepresents the rotation matrix from {I } to {B }.Thus, the velocity of P is written as

where angular velocity of body BIwris equal to J(qr) BIwr,J is the rotation parameterization dependent mapping matrix from generalized rotational velocity BIwrto angular velocity of the body.
The dynamics equation of robot can be written as
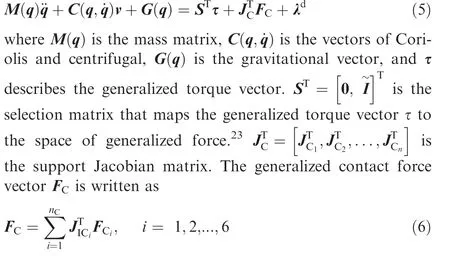
As an extra-planetary exploration robot, the capability of carrying load is necessary. However, it may lead to robot’s trunk instability. The external loads are considered as the external disturbance λdacting on the robot body, which can be expressed as

These disturbances from the loads are not directly influenced on the legs. It is a coupling effect on the legs through the robot body.18
3. Hybrid control framework of wheel-legged hexapod robot
For stably traversing the irregular terrain, the hybrid control framework for the wheel-legged robot is employed to tackle the challenging tasks as well as maintain a level posture to avoid damaging payload. The framework of BIT-NAZA-II is illustrated as Fig. 3.
This framework is designed to autonomously conduct the high-adaption locomotion for accommodating the challenging terrain via GG, WBC and Wheel Control (WC). As for the GG,Central Pattern Generator(CPG)is used to generate various gaits based on the oscillator rather than predefining the gait library. WBC is composed of AC, FBC and Center-ofmass Height Control (CHC), which inputs the quantity of leg-adaption command to adjust the body posture. The detail of framework is demonstrated as follows.
3.1. Gait generator based on CPG
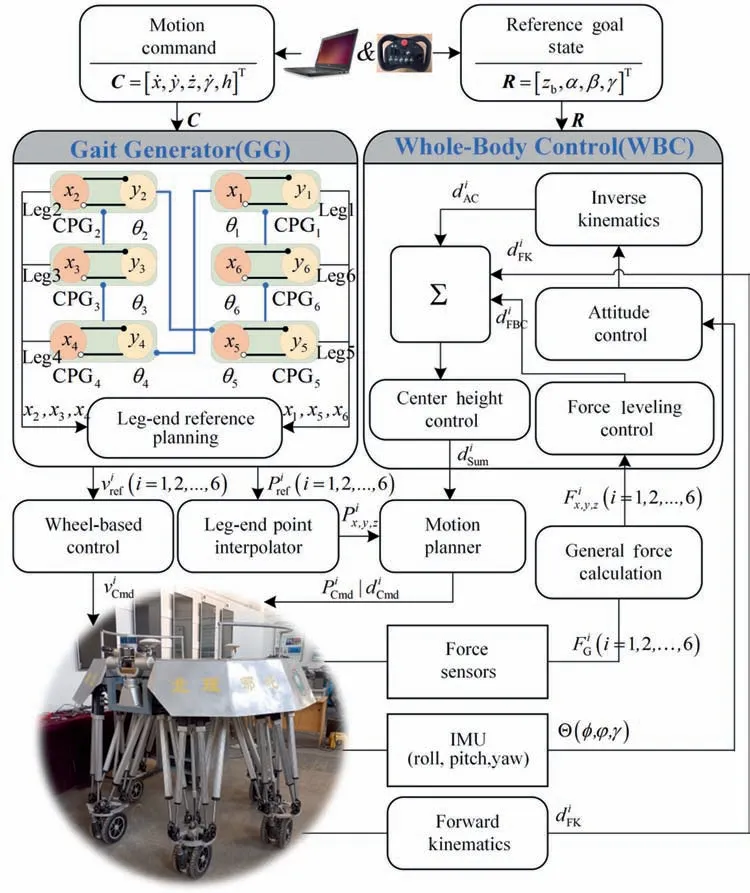
Fig. 3 Control framework of wheel-legged robot.
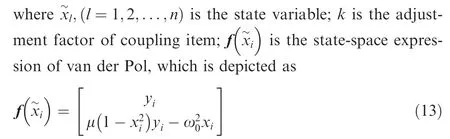
The gait is a rhythmic motion similar to biological gait. The proposed GG provides a devised gait based on CPG.24The CPG can output periodic oscillating signals and map it to various stages of gait, thus generating rhythmic locomotion. A complete cycle of output signal from CPG corresponds to the gait cycle of the flight and touching down movement, that is,the rising period of the oscillating signal is mapped to the flight phase of the gait,and the falling period is mapped to the stance phase of the gait.25The state-space formulation of CPG can be written as

where xiand yiare the state variable of CPGi, μ is a scalar coefficient that satisfies 0 <μ ≤1, and ω0is the natural frequency. The limit-cycle equation of Eq. (8) is

where α0iand φiare the initial phase value of CPGi, and desired phase difference of CPGiand CPGj, respectively.The following expression from Eq. (9) can be written as

where R(φi) is a planar rotation matrix between CPGiand CPGj, which is defined as

Combining Eq.(8)and Eq.(9),the model of loop-CPG network can be shown as
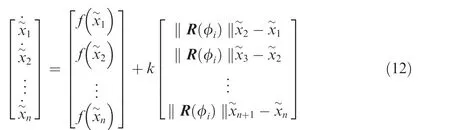
The phase sequence of the gait can be changed by adjusting the phase difference between the periodic oscillators, and the duty ratio of the gait is changed by adjusting the waveform of the CPG output signal so that the speed of robot is changed.As for the wheel-legged hexapod robot, a loop-CPG network composed of 6 CPGs is designed to generate the gait command instead of selecting the gait from the predefined gait library.A series of signals output by the CPGs have the same amplitude but different phases. By adjusting the phase difference of the output signals,the phase difference of each leg gait is obtained,and then various gaits required by the robot are generated.
3.2. Whole-body control
Maintaining a stable body while traversing the challenging terrain is of priority for carrying the precious load. WBC is employed to eliminate the external disturbance caused by terrain geometry,and to balance the robot posture based on sensing the GRF(i=1,2,...,6) and attitude data Θ(φ,φ,γ).This submodule mainly consists of AC, FBC and CHC.
3.2.1. Attitude control
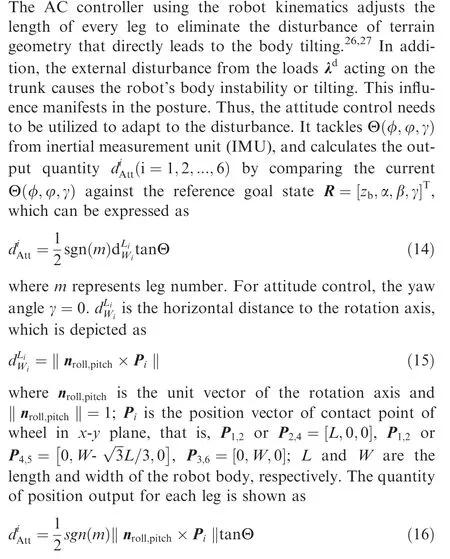
where m is a weight variable in terms of the leg. The pastural controller focuses on the two orientation, namely roll and pitch. When robot adapts the roll angle, m=-1 for left fore,left middle, left hide leg which are respectively signed No. 2,No.3,No.4,and m=1 for right fore,right hide,right middle leg that are signed No. 1, No. 5, No. 6, respectively. As for pitch adjustment, m=1 for legs RF (No. 1), LF (No. 2) and m=-1 for legs LH (No. 4), RH (No. 5). LM (No. 3) and RM (No. 6) are not able to adjust on the pitch orientation.17
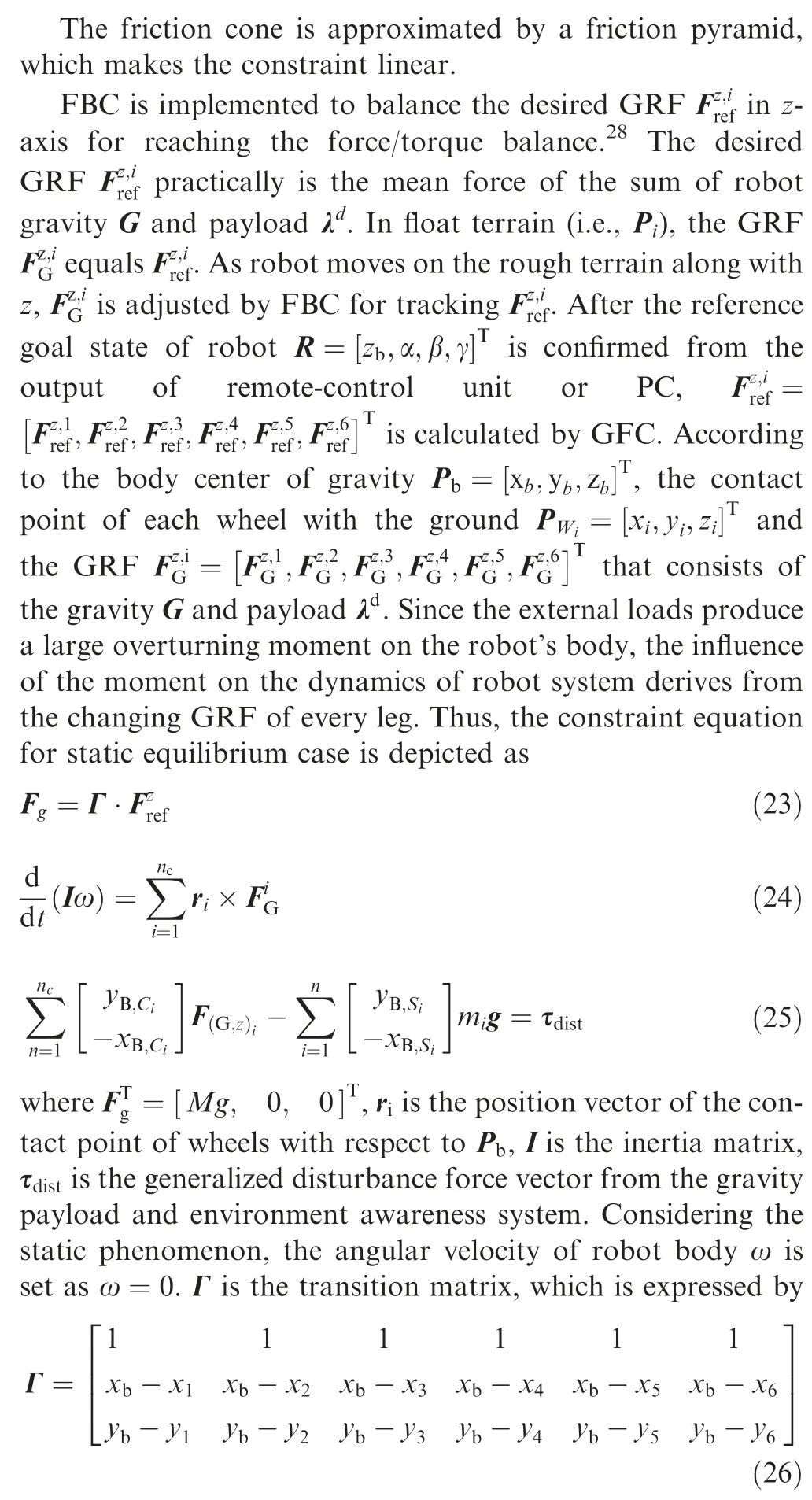
3.2.2. Force/torque balancing control
The wheel-legged hexapod robot is a large inertia rover whose every leg approaches the weight of 75 kg, which means that it is hard to perform a dynamic gait when the leg locomotion is conducted in terms of body stability.In addition,for the transportation of vulnerable load, the unstable behavior of robot body with dynamic gaits may cause the damage of transporting objectives. Due to the redundant system for hexapod robot, the static gaits are generated by GG and only static physical phenomenon is considered.
Touch-down detection:Touch-down detection is a key step for robot to react for the external terrain so that the body tilting, even the mechanism damage, can be avoided. According to the coordinate system, it is assumed that Fx,Fyand Fzrepresent the force component of the robot’s foot-end on x-, yand z-axis, respectively. The resultant force F = Fx+Fy+Fz. Therefore, the static balance equation of foot-end can be expressed as
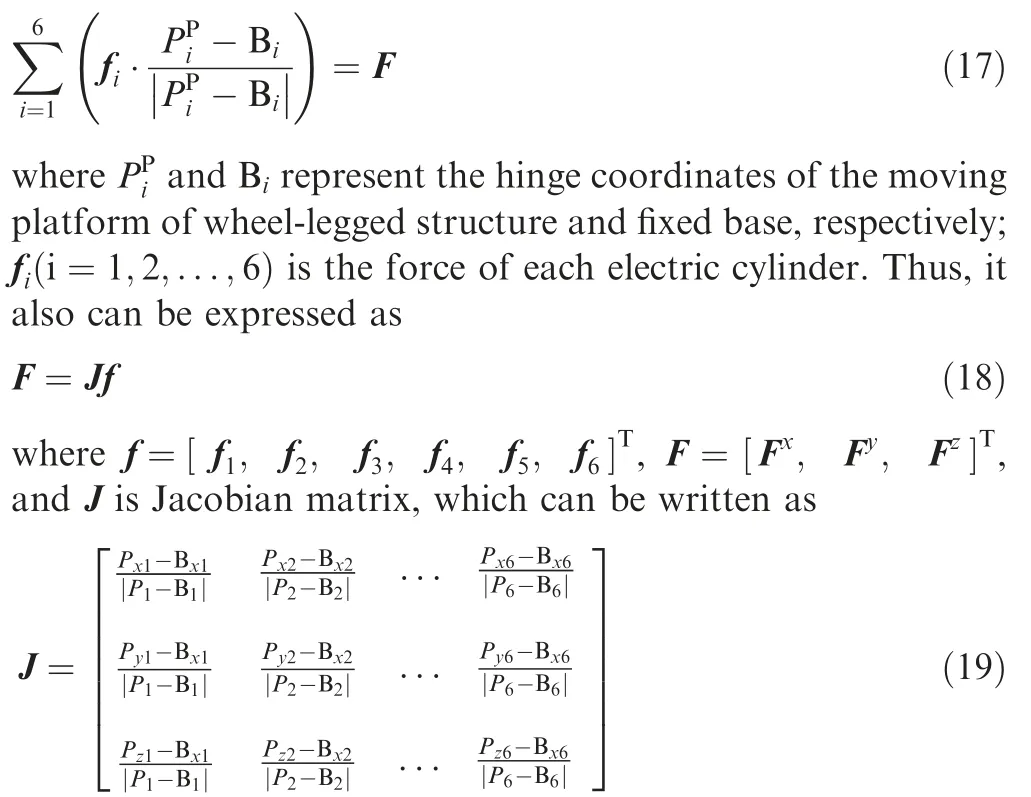
Since the grounding sensing only detects the generalized force in the z-axis direction of the foot-end, Eq. (18) can be expressed as
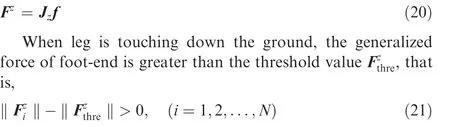
Then the touch-down action is stopped and switched to swinging action,which means that the external contact disturbance caused by complex terrain is adapted through Eq. (21).
Contact constraints: To ensure no slippage of contact points, the tangential forces are constrained to keep inside the Coulomb friction cone that is defined by the terrain friction coefficient μ. The constraint can be expressed as

The equation also can be expressed as

where C+is the Moore-Penrose pseudoinverse for matrices with independent column. It can be written as
3.2.3. Center-of-mass height control
The operation space of robot usually relies on the least operation space of the actuator. As for the 6-DOF structure robot,the operation space of every leg directly determines the whole operation space of robot.When robot performs the leg-based,wheel-based or hybrid locomotion with postural adjustment,the operation space of every leg tends to be small as control error reduces the operation space. Due to the present of the influence of the external load disturbance on center-of-mass of robot, the center adjustment is controlled to the desired height to improve the walking ability of robot.In this submodule, the robot’s center height is controlled via CHC to expand the operation space of whole robot.29
Algorithm 1. Input (di FK,di AC,di FBC,HRefb ) and output di Sum.1. Obtain the postural command quantity of AC di AC.2. Obtain the output quantity from FBC di FBC.3. Obtain the command quantity of FK di FK.4. di Tem is obtained from Eq. (29).5. dAve is obtained from Eq. (30).6. di Sum =di Tem-dAve according to reference height of center of mass HRef b .7. return di Sum(i=1,2,...,6)
4. Simulation and experiment
4.1. Simulation
The above-described GG and WBC methods are implemented and tested using the V-Rep simulation environment together with MATLAB programming. The terrains are configured by adding the variable steps, bumpy slopes, soft soil, basalt and rubble,which aim to resemble some of the most real planetary surfaces for verifying the performance of robot.
4.1.1. Walking over the steps
Because of the presence of large obstacles while robot handles the harsh transportation task,the capability of legged locomotion while undertaking the heavy load of 100 kg(orange object on base) needs to be verified. Thus, the configured steps that maximum height 0.15 m and the slopes that maximum height of 0.12 m and maximum climbing angle of 15 degree are set in this scenario.The numerical results of walking over the steps are illustrated in Figs. 4-6.
The step-based terrain is designed to simulate the steep hump.As shown in Fig.4,the hexapod wheel-legged robot traverses the steep steps with the tripod gait along with the time,which shows that it is capable of overcoming the challenging terrain. In particular, keeping a stable pose and avoiding load damage are also the key for transporting the precious payload.In this scenario,robot walks over the uneven terrain as well as performs the stable body with FBC and AC methods. The results in attitude and force are shown in Fig. 5 and Fig. 6.
During the entire process of walking, the postural angles,i.e., roll and pitch (see Fig. 5) are maintained between -1oand 1o, which shows the ability of robot to adapt to terrain.In the process of touch-down locomotion, the threshold value‖‖=800 N is used, which means that the swinging leg touching the ground is stopped when the GRF approaches to 800 N. The peak force in the stance or flight process (see Fig.6(a)and(b))is rapidly eliminated and adjusted to desired force by FBC.
4.1.2. Driving over the slopes
Driving locomotion on extra-planetary task can efficiently improve the speed of carrying objectives, compared to pure legged locomotion. Meanwhile, the trunk stability of driving is also necessary to the robot. To validate the performance on the bump, the simulation of driving over the slopes with the load of 100 kg (orange object on base) is carried out.The terrain consisting of the several bumps, such as tilting angle of 13oand 15o,is configured for verification.The sequential scenes of this scenario are depicted in Fig. 7.
In this scenario, the maximum tilting angle of bump is 15o,and the bumps are set to confirm all the wheels encountering the dump, which aims to test the ability of adapting the legs to terrain.
In bump-based scenario, the roll and pitch angles of robot body are maintained from-0.5oto 0.5o,where the peak angle does not occur ,which is shown in Fig. 8. As for the contact constraints, Eq. (22) is always satisfied when driving over the bumps. The wheels drive up and down the bumps, which causes the change of pitch and roll angle. But using the FBC and AC methods, the high pitch or roll is adjusted sharply to the zero. Also, the GRF of each leg (LF, LH, RM, LM,RH and RF) acting on the robot body are balanced to the desired forces by FBC, which is shown in Fig. 9.
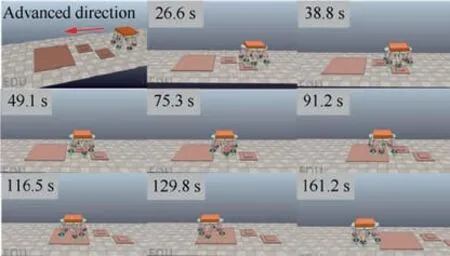
Fig. 4 Robot walks over the terrain with tripod gait.
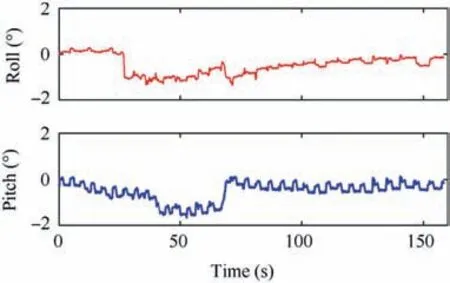
Fig. 5 Attitude angles of robot body.
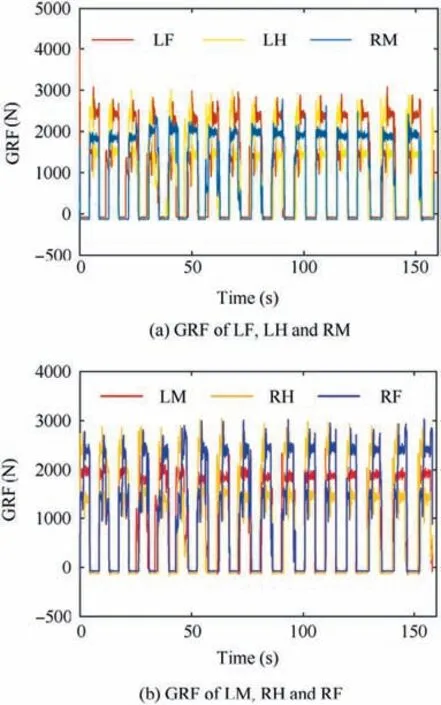
Fig.6 Result data of forces acting on robot body when walking over the steps.

Fig. 7 Robot drives over the variety of bumps.
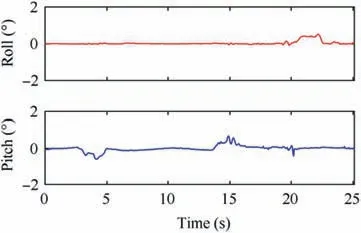
Fig. 8 Attitude angles of robot body when driving over the bumps.
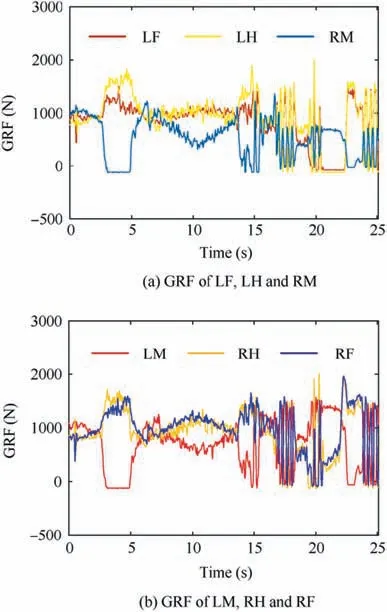
Fig. 9 Result data of forces acting on robot body while driving over the bumps.
4.1.3. Walking on analog star surface
To further demonstrate the performance of parallel wheellegged hexapod robot on extra-planetary exploration, the numerical validation with the analog star surface that is composed of soft soil, basalt and rubble is employed. In this scenario, not only the low-stiffness and complex terrains are configured, but a KUKA manipulator is carried, which is mounted on the robot’s trunk to verify the stable performance of robot. A series of snapshots are shown in Fig. 10.
From experimental scenario, the soft soil (brown terrain),basalt (strip obstacles) and rubble are deployed to simulate the true star surface.Additionally,as an extra-planetary robot,the potential loads, such as manipulator, precious instrument or even the wounded that needs to be carried and avoid secondary harm during transportation, are installed and verify the stability performance to handle the harsh exploration tasks. The robot successfully walks over the devised terrain from the snapshots.
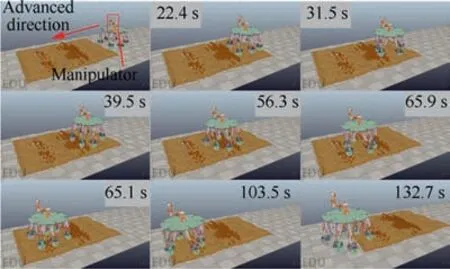
Fig. 10 Robot walks on analog star surface which consists of soft soil, basalt and rubble terrain.
From Fig. 11, the roll information while walking over the terrain is maintained between -3oand 1o, and the pitch angle is kept from-2oto 2o.The postural fluctuation in this scenario is higher than in terrains of Section 4.1.1 and 4.1.2, which is due to the low-stiffness terrain such as soft soil causing high contact uncertainty, compared to high-stiffness environment.
Also, the GRF of each leg are maintained in the range of 1000 - 2000 N,which is shown in Fig.12.The threshold value‖‖=800 N.Although the peak force occurs in the legged locomotion and the force value tends to a higher quantity owing to contacting with rubber, the adaption is rapidly tackled by FBC to the desired value.
4.2. Experiment
To verify the proposed control framework, a series of experiments for the electric parallel wheel-legged hexapod robot moving on the challenging terrain are carried out. The terrain environment consisting of steps, slopes, soft and gravel floor are designed to resemble the true terrain.The results in attitude control of robot body and force/torque control of each leg acting on body are compared with only AC method as well as with only FBC.
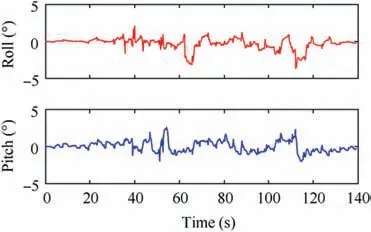
Fig. 11 Attitude angles of robot body when walking on analog star surface.
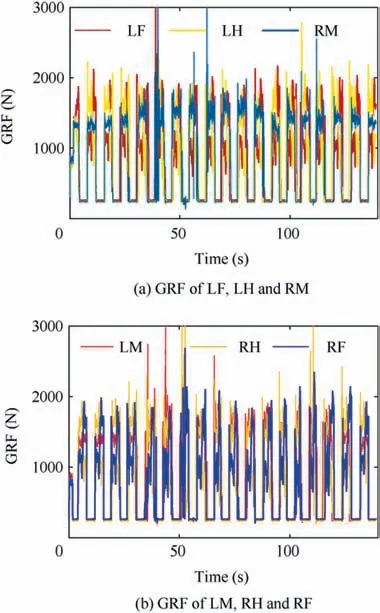
Fig.12 Result data of forces acting on robot body while walking on the analog star surface.
In this setup, the indoor experiment and outdoor experiment are conducted, which mainly cover the devise characters of terrains such as high step wheel-based locomotion failing to driving, titling slope of titling angle 15 degree, soft and gravel surface. An Inertial Measurement Unit (IMU) with an integrated Kalman filter is used to estimate the body orientation(i.e., roll, pitch and yaw). The 36 force sensors are installed on the electric cylinders, thus sensing the variety of terrain geometry and providing the GRF data.
4.2.1. Indoor experiments
When robot performs a tripod gait,three legs of robot as a group cycles periodically between the two stages of flight and stance. Owing to the disturbance of terrain geometry, the touch-down point of each legs does not lie in the single plane.Thus, the shift of Center of Gravity (COG) and the unevenly distributed loads are caused. These lead to the fluctuation of postural angles and robot body titling. The postural fluctuation (see Fig. 14) corresponds to the peak force in Fig. 15(a)and (b). But the peak angles and force from Fig. 14 and Fig. 15 are sharply reduced by WBC adapting the legs to the terrain and balancing the force distribution, which means that the FBC can efficiently adjust the force distribution when footend contacts uncertainty.As for only AC or FBC method,the orientation of robot body causes a high fluctuation, such as roll angle changing from -3oto 3o, and pitch angle changing from-5oto 4o.In addition,the posture peak appears multiple times by using AC or FBC during the process of walking over the terrain, compared to using WBC. It offers the possibility for the robot to walk over the large obstacle in the true application, even in the planetary surface.
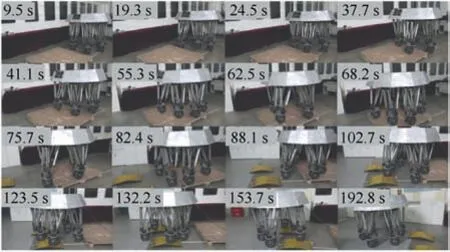
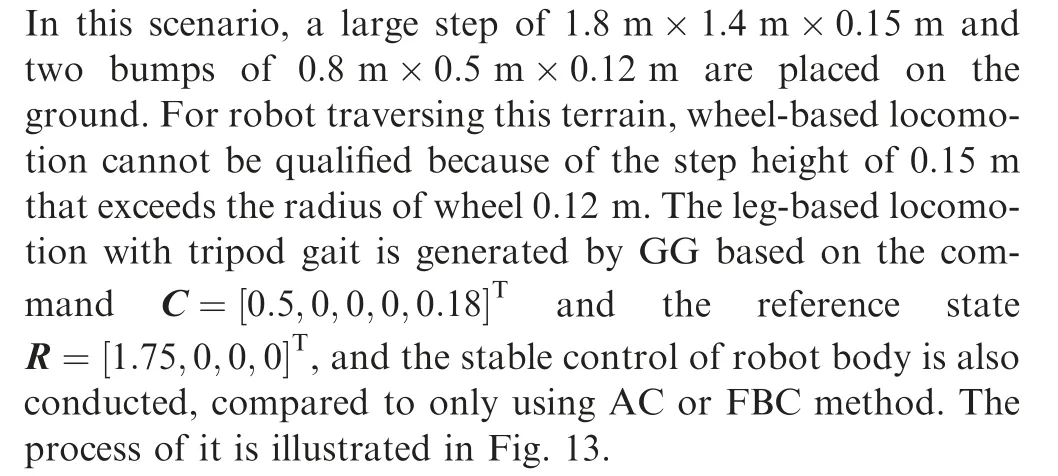
Fig. 13 Robot traverses step- and bump-based uneven terrain with tripod gait.
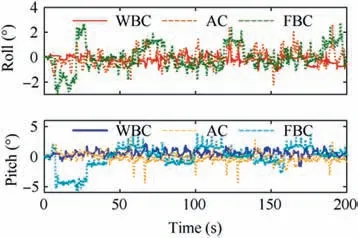
Fig. 14 Orientation of robot body while walking over step- and bump-based terrain by using WBC, AC and FBC.
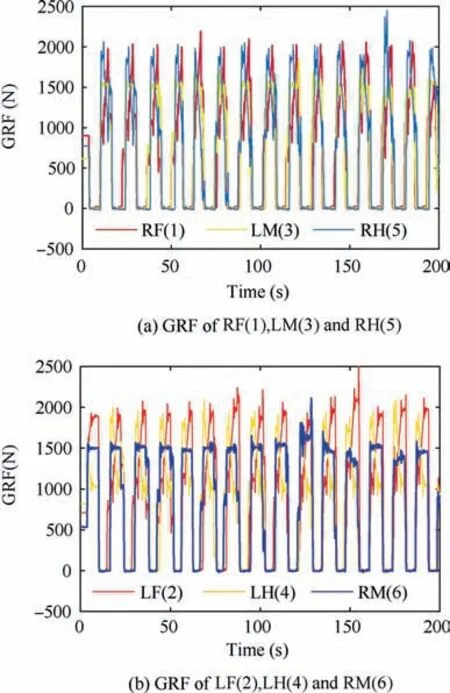
Fig.15 GRF acting on robot body while walking over step-and bump-based terrain.
Driving over the undulating ground is also deployed to test the performance of robot with the proposed framework due to the efficiency of driving locomotion. In this scenario, two bumps of 0.8 m×0.5 m×0.12 m are placed on the left and right sides, which satisfied the encounter of all wheels. The detailed scene is shown in Fig. 16.
In this scenario,the speed of robot is 0.5 m/s.From Fig.16 and Fig. 17, LF(2) firstly encounters the bump. If not actively adapting, the pitch and roll angles will be beyond zero and body tilting will occur while driving up it. It can be seen at 11.2 s from Fig. 17. However, the tendency of body tilting is blocked and reduced by WBC at 14.0 s. And the whole roll and pitch are maintained between -2oand 2oby using WBC. However, using pure AC method, the orientation of robot body causes a high vibration to almost 4oin roll angle.More than that, the roll and pitch angle tend to a high value,which means that robot fails to drive over the terrain by only using FBC.
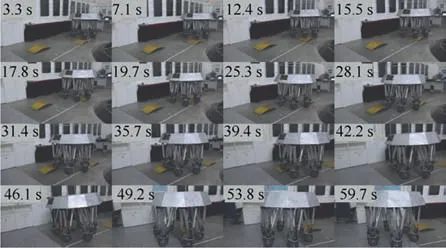
Fig. 16 Robot drives over bump-based terrain.
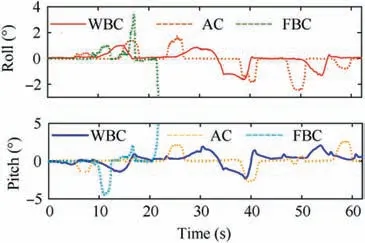
Fig. 17 Orientation of robot body while driving over bumpbased terrain by using WBC, AC and FBC.
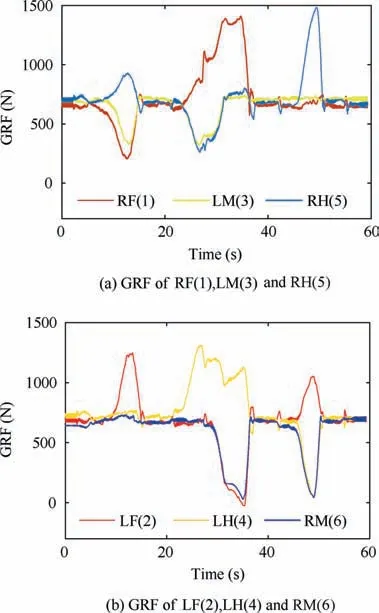
Fig. 18 GRF acting on robot body while driving over bumpbased terrain.
The GRF of every leg also implies the change of terrain geometry, which is shown in Fig. 18 (a) and 18(b). At 11.2 s,the GRF of LF(2) is increasing. It means that LF(2) drives up the dump. By using WBC method, the forces of load are distributed equably. In particular, robot will slow down the speed to reduce the impact on the ground when it senses the obstacles based on the leg force/torque data. Similarly, the speed reverts to the commanded value after the adjustment of WBC finished.
4.2.2. Outdoor experiments
To validate the performance of robot with the proposed control framework, a series of outdoor experiments are also conducted, which focus on entirely true terrains, including a wasteland consisting of a step of 0.12 m and a soft-soil land.The details are presented as follows.

Fig. 19 Robot walks over outdoor wasteland.
Robot switches the locomotion from wheel-based locomotion to the leg-based locomotion due to encountering the unnegotiated step (see Fig. 19-1). At this moment, the control unit inputs a height command and then robot can be able to walk over the terrain.The lifting height of a leg is greater than 2 cm, which aims to increase the control margin and avoid touching the step. From Figs. 19-2, 19-3, 19-4 and 19-5, the legs in these pictures undergo the change from hard flat ground to the soft uneven ground.The transformation can lead to the change of GRF when legs touch down the ground and robot body tilts. It is obviously shown in Fig. 20 where the peak angle occurs. However, these peak angles sharply are eliminated by WBC adapting the posture and equally distributing the force of loads (Fig. 21). The roll and pitch of robot body are always around ±1.2oalong with the time.
After walking over the step, robot encounters the soft-soil land and switches to driving over it due to the efficiency of driven locomotion(Fig.22),which is an important feature for the planetary exploration robot for rapidly arriving at the target destination. But the robot body would jolt or tilt if there is no postural adjustment.For electric parallel wheel-legged hexapod robot,the AC and FBC are employed to adapt the robot to the rough terrain and keep a horizontal posture.
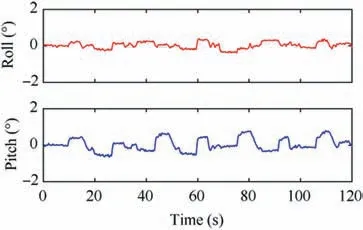
Fig. 20 Orientation of robot body while waking over outdoor wasteland.
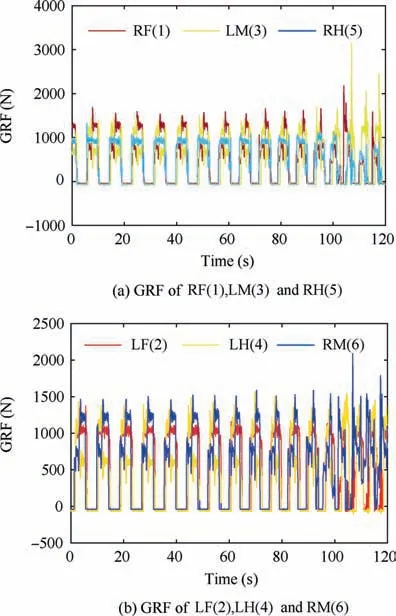
Fig. 21 GRF acting on robot body while walking over outdoor wasteland.
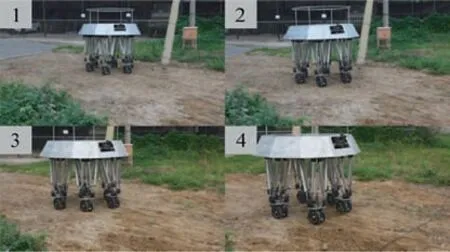
Fig. 22 Robot drives over soft-soil terrain.
From Fig.22-1 to 22-4,robot drives on the soft-soil surface and the robot body always is kept a leveled body.The roll and pitch fluctuate from-1.5oto 1.5oas shown in Fig.23,and the relative peak angle will rapidly be adjusted to a minor value during the entire maneuver.
Further, the experimental trial is conducted, where robot with three persons of 240 kg walks over the sand-gravel terrain, which is shown in (Figs. 24 and 25).
To smoothly show the performance of high-adaption locomotion with a stable body, the extended experiments are carried out, which are shown in Fig. 26. The robot can be able to reconfigure the legs to negotiate or avoid the obstacles. In Fig. 26-1, under the load of 3 persons of about 240 kg, robot conducts the turn-around locomotion, and LF(2), RF(1), LH(4) and RH(5) rotate 60oaround respective rotation axis. In Fig. 26-2, robot shows the height-changing locomotion and track-changing locomotion with 2 persons of about 160 kg,which aims to expand the space of traversability, which is a key advantage, compared to other extra-planetary rovers. In Figs.26-3 and 26-4,robot negotiates the obstacles with respective locomotion with stable value of GRF (Fig. 27).
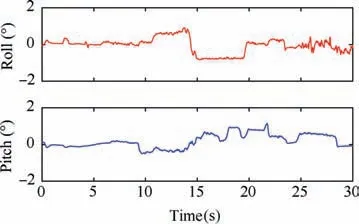
Fig. 23 Orientation of robot body while driving over soft-soil terrain.

Fig. 24 Robot with 3 persons of 240 kg drives over sand-gravel terrain.
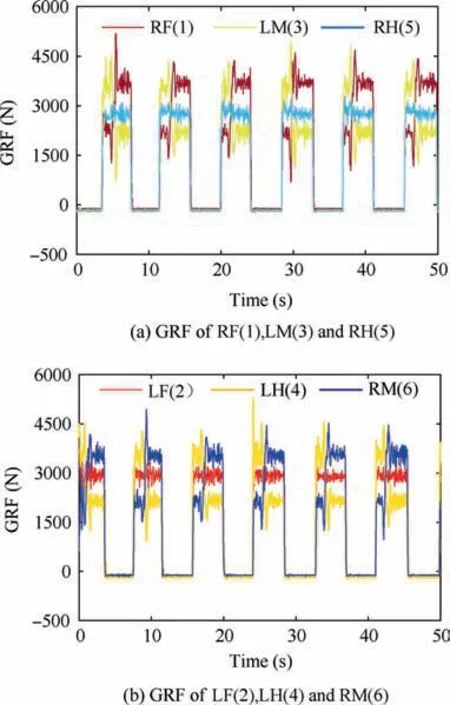
Fig. 25 GRF acting on robot body while walking over sandgravel terrain.

Fig. 26 High adaption locomotion, transability and bearing load performance.
The wheel-legged robot with the proposed control framework of this study not only has a capability of negotiating the obstacles, but can maintain a leveled robot body. The robot performance under the indoor and outdoor conditions,even under the condition of bearing three persons of about 240 kg, is validated. The GRF that acts on robot body while running track-changing locomotion with 2 persons is shown in Fig.28.The performance of a series of numerical simulation and experiment offers a possibility to be applied to stably transporting the precious objectives or even heavy loads,including manipulator,and humans on extra-planetary surface(Fig. 28).
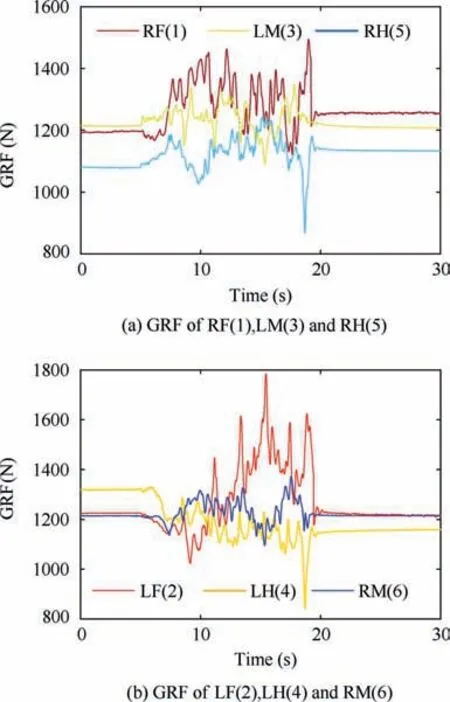
Fig. 27 GRF acting on robot body while running heightchanging locomotion.
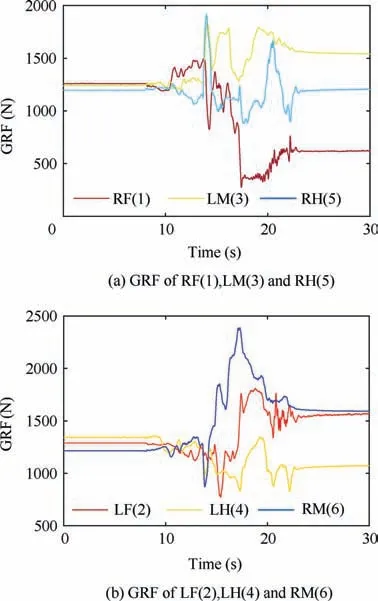
Fig. 28 GRF acting on robot body while running trackchanging locomotion with 2 persons.
5. Conclusions
The wheel-legged robot that has capability of stably carrying the precious objectives to avoid damaging the loads while negotiating the obstacles offers the possibility to be applied to planetary exploration. In this study, an electric parallel wheel-legged hexapod robot with a novel control framework is proposed for walking or driving over the challenging terrains. The main conclusions are drawn as follows.
(1) A novel electric parallel wheel-legged hexapod robot with hybrid control framework is proposed for walking or driving over the unstructured terrains by using multiobstacle-negotiation locomotion.
(2) Furthermore, based on the proposed control framework, the WBC including AC and FBC method is employed for the robot to maintain a stable body by adjusting the length of legs and by equally distributing the GRF. The resulting postural angles and forces are controlled to the desired value.
(3) The experimental results disclose the performance of the high-adaption locomotion,stability and efficiency.Especially, the experiment of moving on the rough terrain with the 3-person load of about 240 kg is successfully conducted. This performance of the proposed robot offers a possibility to be used as a PEMR to transport instrument missions on the planetary surface.
However, the limitations also emerge such as heavy weight of robot that restricts dynamic locomotion. In addition, the robot’s wheel needs to be devised for a larger contact surface so that there is greater contact friction. In future investigations, motion planning of a wheel-legged robot by identifying the unknown terrain and integrating an environment awareness system will be exploited,and the decision-making method with autonomously negotiating obstacles also should be investigated.
Acknowledgements
This study was supported by the National Natural Science Foundation of China (No. 61773060) and National Key Research and Development Project: Design and optimization of small, multi-functional and highly mobile rescue robot system for major natural disasters.
 CHINESE JOURNAL OF AERONAUTICS2021年5期
CHINESE JOURNAL OF AERONAUTICS2021年5期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Ferrofluid moving thin films for active flow control
- Preliminary study on heat flux measurement data of TT-0 flight test
- An analysis and enhanced proposal of atmospheric boundary layer wind modelling techniques for automation of air traffic management
- Jet sweeping angle control by fluidic oscillators with master-slave designs
- Hot deformation behavior and microstructure evolution of the laser solid formed TC4 titanium alloy
- Electrochemical trepanning with an auxiliary electrode