移动三维激光扫描技术在地铁隧道病害检测中的应用
2021-05-11 08:15:16孟庆年张洪德王智胡玉祥尹相宝
城市勘测 2021年2期
孟庆年,张洪德,王智,胡玉祥,尹相宝
(1.青岛市勘察测绘研究院,山东 青岛 266032; 2.青岛市地下空间地理信息工程研究中心,山东 青岛 266032;3.山东省海岸带调查监测工程技术协同创新中心,山东 青岛 266032)
1 概 述
地铁工程作为“百年工程”需要运行多年,但随着使用时间的增长,地铁隧道在所难免地会出现一些病害。常见的病害有渗漏水、裂缝、错台、侵界等,这些病害的存在会对地铁隧道的使用寿命产生不好的影响[1,2]。因此,需要定期对隧道的病害进行检测,并进行相应的修复。
对于裂缝、渗漏水、错台等大部分病害,常规的测量方法是人工巡检,在隧道病害处附近做标记,并对里程等情况进行记录。对于侵界等病害,通常采用全站仪进行测量,并与车辆轮廓进行对比。这些方法费时费力,且采集信息有限,不能很好地满足使用需求。针对这些问题,使用自主研发的移动式三维激光扫描系统对隧道进行扫描,并对扫描效果进行分析。根据对实例的分析,移动式三维激光扫描技术能够对地铁隧道病害很好地进行检测。
2 移动式三维激光扫描技术
三维激光扫描技术又被称为“实景复刻技术”,能够很好地反映现场的实际情况,是继GNSS技术之后,测绘领域的又一项技术革新。三维激光扫描仪具有非接触式测量、扫描作业快、获取信息量大、实时性强以及自动化程度高等特点,非常适合进行地铁隧道病害检测[3,4]。使用三维激光扫描仪可以对裂缝、渗漏水、漏泥、错台以及设备侵界等病害进行检测,还可以对隧道内设备、管道位置进行测量,测量内容非常丰富,这是常规手段所达不到的。
使用架站式三维激光扫描仪可以很好地获取扫描区域的详细数据,但是由于需要逐站测量,测量效率依旧偏低。针对这种情况,采用一种自主研发的移动式三维激光扫描系统进行测量,通过轨道车与三维激光扫描仪之间的协同作业,实现对地铁隧道的扫描测量。相比于架站式三维激光扫描仪,移动式三维激光扫描系统的测量效率更高。根据对隧道扫描结果的分析,结合现场巡检记录,移动式三维激光扫描系统可以较好实现对隧道的病害检测。
2.1 外业数据采集
针对架站式三维激光扫描仪测量效率不高的情况,采用一种自主研发的移动式三维激光扫描系统进行测量(如图1所示)。通过整合Leica P40三维激光扫描仪、非接触式里程计、轨距测量仪等多种传感器,可以获取高质量的三维点云数据以及影像数据。通过人工设置速度,可以实现小车自动运行,省时省力。

图1 移动式三维激光扫描系统现场作业
2.2 内业数据预处理
使用移动式三维激光扫描系统获取的点云数据无法直接使用,通过将轨道车里程、时间等信息与Leica P40三维激光扫描仪的测量数据进行匹配,可以初步获得无里程信息的数据。在生成的正射预览图上做里程标注,并以此进行里程校正。对于矿山法区间,标注位置为明显的、等距的接缝处。对于盾构/TBM区间,标注位置为KP块左下角(如图2所示)。进行里程校正,即可以得到带里程信息的正射影响数据以及点云数据。最终生成的点云数据以里程为基准,从南至北排列,里程、环号递增。

图2 盾构/TBM区间正射影像数据里程校正
3 病害分析
3.1 隧道裂缝、渗漏水检测
裂缝和渗漏水地铁隧道最常见的病害,是地铁病害检测的重要内容。相比于常规的人工巡检方法,三维激光扫描仪可以更加直观准确反映出裂缝、渗漏水的里程、长度等信息(如图3所示)。为了提高内业数据的处理效率,外业扫描时可在裂缝和渗漏水点处做上标记。

图3 三维激光扫描仪识别裂缝、渗漏水
移动式三维激光扫描系统在数据采集过程中是移动的,采集的效率更高,通过生成正射影像的方式进行检测。移动式三维激光扫描系统适合于对长距离隧道进行扫描测量,能够快速实现对隧道较大裂缝、渗漏水的检测。
3.2 错台检测
盾构或TBM隧道通过管片进行连接,由于受力不均匀,两环片间就会发生错台(如图4所示)。错台的存在会造成管片的破损以及渗漏水,会对隧道的结构安全以及使用年限造成影响[5]。

图4 错台三维点云图
以里程标注线为中心,向大、小里程方向截取断面点云,即两相邻管片交接处点云切片。管片错台的计算步骤如下:
(1)管片数据去噪
在实际作业当中,使用三维激光扫描仪获取的点云数据往往会包含一些噪声数据(例如测量人员、管线、疏散通道等等),这些噪声数据的存在会对错台计算、管片半径计算等造成较大影响。根据隧道点云数据特性,采用一种基于随机抽样一致性算法(RANSAC)的空间圆拟合方法(公式1、2)进行噪声数据剔除[6]。RANSAC算法通过使用少量的点云数据计算出圆球参数,使用剩余的点云数据对模型进行验证。通过足够次数的迭代运算,计算得到准确的圆球参数。
设球面的方程为:
(x-a0)2+(y-b0)2+(z-c0)2=R2
(1)
式中:a0、b0、c0—球心坐标;
x、y、z—管片切片点云数据坐标;
R—圆球半径;
设过球心空间平面的方程为:
aa0+bb0+cc0=1
(2)
式中:a0、b0、c0—球心坐标;
a、b、c—平面方程参数;
以式(2)为条件方程,使用附有条件的间接平差方法计算得到管片切片点云的中心坐标以及半径。计算管片切片点云数据与球心坐标之间的距离,与球心半径进行对比,剔除较差较大的点,即可完成噪声点的剔除(如图5所示)。
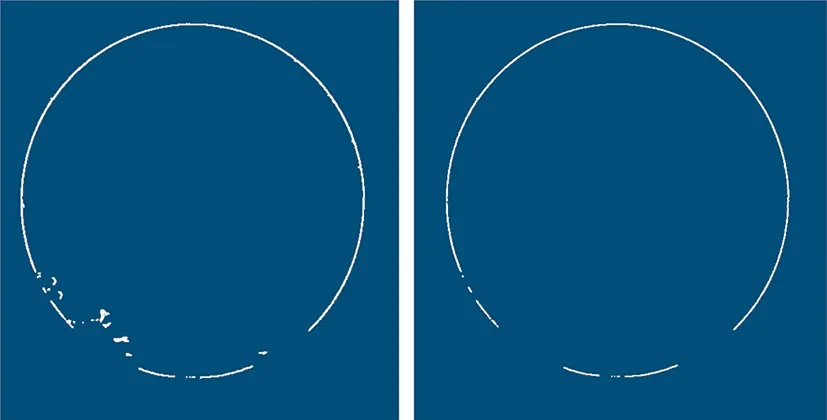
图5 管片切片点云噪声点剔除
(2)错台量计算
对盾构/TBM管片的KP块左下角进行标注,根据盾构管片的规格(如图6所示),即可以推算得到相邻环片间的交接位置以及同一环不同管片间的交接位置。以此作为依据,即可以在点云上获取相邻管片间的点云切片。

图6 管片拼装关系图
参考迭代最近点算法(ICP算法),以一份切片点云作为参考点云,另一份切片点云作为目标点云,计算两片点云之间点与点的最近距离,最终可以得到错台量的详细情况,如表1、表2所示。

同一环不同管片间错台量详细报表 表1

相邻环片间错台量详细报表 表2
3.3 限界检测
地铁隧道内经常会进行各种施工,例如设备安装等,部分施工存在着侵界的隐患。为了保证列车的安全通行,需要对区间隧道以及设备的限界进行测量,对侵界隐患进行排查。常规的测量方法是使用全站仪进行测量,但是这种测量方法是基于“点”的,作业效率不高且容易漏测。针对这些问题,使用移动式三维激光扫描系统对隧道进行限界检测。
首先,获取地铁列车的断面设计图,进行离散化后获得列车的设计断面点云,通过设置起止里程即可得到列车的限界轮廓模型[7](如图7所示)。

图7 列车轮廓模型设计
然后将实测点云数据与列车的限界轮廓模型进行套合并展开,根据实测点云与列车的限界轮廓模型之间的距离设置色阶,可以从颜色直接检查整体侵界情况(如图8(a)所示)。还可以对局部区域做切片,对具体侵界情况进行分析(如图8(b)所示)。

图8 限界分析图
4 实例分析
4.1 实例一:获取区间裂缝、渗漏水信息
为获取某区间隧道部分区域的渗漏水、裂缝情况,使用移动式三维激光扫描系统对区间隧道进行扫描作业。使用移动式三维激光扫描系统进行作业,设置速度为 0.5 m/s,外业耗时 20 min,共生成正射影像(如图9所示)6幅。

图9 移动式三维激光扫描正射影像图
对里程进行标注校正后,对影像进行调绘,可以实现对裂缝、渗漏水的识别(如图10所示),共发现较大裂缝6处、渗漏水3处(如表3所示)。根据影像识别出的裂缝以及渗漏水,均能在现场指定里程位置处找到,准确率高。

图10 裂缝、渗漏水识别

裂缝、渗漏水尺寸表 表3
4.2 实例二:获取限界、管片错台信息
为获取某区间隧道的限界、管片错台情况,使用移动式三维激光扫描系统对某区间进行扫描作业。对某盾构区间使用移动式三维激光扫描系统进行测量,设置速度为 0.75 m/s,外业耗时 40 min,共生成正射影像(如图11所示)14幅。对里程进行标注校正后,生成点云数据(如图12所示)。
对生成的点云数据与列车的限界轮廓模型进行整体限界分析(展开图如图13所示),检测区间共 848 m,无侵界情况发生。使用全站仪对区间限界进行抽测,无侵界情况发生。

图12 移动式三维激光扫描点云数据预览图

图13 移动式三维激光扫描整体限界分析展开图
对区间564环的错台情况进行检测,并生成详细报表。对相邻环片间错台量进行计算(部分数据如表4所示),其中最大错台位于169-170环,错台量为 15.3 mm,错台弧长 3.44 m。对同一环不同管片间错台量进行计算(部分数据如表5所示),最大错台量位于374环,错台量为 6.9 mm。

相邻环片间错台量汇总表 表4

同一环不同管片间错台量汇总表 表5

续表5
根据对实例的应用,移动式三维激光扫描系统可以快速、准确获取隧道的错台以及侵界情况。
5 结 论
为了保障地铁的安全运行,需要定期对地铁隧道的病害情况进行检测。目前常规的检测手段存在效率低下、自动化程度低以及采集信息有限等问题。为了解决这些问题,引入三维激光扫描技术进行地铁隧道病害检测。使用自主研发的移动三维激光扫描系统对地铁隧道进行扫描测量,通过对扫描数据的调绘处理,三维激光扫描技术能够很好实现对隧道裂缝、渗漏水、错台以及设备侵界的检测,同时还能对其他10余种病害进行检测,还能对隧道内设备、管道的位置进行测量。根据对实例的应用分析,移动三维激光扫描系统可以快速、准确地实现对隧道的病害检测。
猜你喜欢
四川建筑(2022年5期)2022-11-09 12:57:44
安防科技(2021年2期)2021-11-30 23:51:10
中国科技纵横(2018年8期)2018-06-20 07:42:06
科学与财富(2017年19期)2017-07-19 22:42:54
贵阳学院学报(自然科学版)(2016年4期)2016-08-31 11:57:26
肿瘤预防与治疗(2015年1期)2015-09-26 07:26:23
铁路通信信号工程技术(2015年4期)2015-02-28 16:59:01
城市轨道交通研究(2015年5期)2015-02-27 11:01:55
水电站机电技术(2014年1期)2014-09-26 11:59:53
中国交通信息化(2014年3期)2014-06-05 03:07:18