
基于形态学运算和图像融合的疵病图像分割算法
2021-05-11 09:11侯劲尧高爱华刘卫国闫丽荣李文瑾
探测与控制学报 2021年5期
侯劲尧,高爱华,刘卫国,闫丽荣,李文瑾
(西安工业大学,陕西 西安 710021)
0 引言
在高反射镜检测过程中,受到照明光源不均匀、离焦以及被检物体表面对光线的吸收率与反射率不同等因素的影响,图像背景会出现不均匀现象,这对后续图像的分割和提取会造成严重影响[1-3]。图像分割是疵病检测过程中必不可少的环节,其提取结果的优劣会影响图像特征提取和图像识别过程,继而影响表面疵病测量的精确度。对于高反镜表面疵病,其图像中所包含的疵病信息量较少、背景光不均匀以及空气中灰尘所产生的散射光噪声会导致图像的过分割现象,而采用传统的分割方法难以有效地获取疵病的信息[4]。本文针对此问题,提出基于形态学运算和图像融合的疵病图像分割算法。该方法可解决高反射表面疵病图像过分割的问题,提高疵病识别的精确度。
1 疵病图像分割算法
图像分割是分析和检测疵病中必不可少的环节,其分割的结果对于疵病尺寸信息的影响很大,在疵病图像的处理环节中,将疵病信息从整幅疵病图像中分离出来,才有利于完成后续疵病的识别和提取。
在一幅疵病的灰度图像中,一般包含疵病目标、背景和噪声,而疵病目标和噪声分别占据不同的灰度级。最常用的提取方法就是通过阈值的方法实现对图像的分割,如式(1)所示:

(1)
此时疵病图像就分割为像素为1的目标疵病和像素为0的背景两个部分,可更直观地获得疵病的信息。
但在疵病采集的过程中,因背景光照明不均匀、离焦等外界环境的影响很容易造成疵病图像采集不清晰、不均匀的现象。如图1(a)所示,为通过显微散射法采集到的高反镜表面疵病图像,其背景光跟一些较弱的疵病灰度值十分接近,而此时阈值T选取就比较困难,因此本文采取Otsu算法来获取阈值。Otsu算法是一种自动阈值的检测方法,在图像的一维直方图的基础之上,满足分类的各组之间方差最大,各组之内方差最小的情况时为最佳阈值。
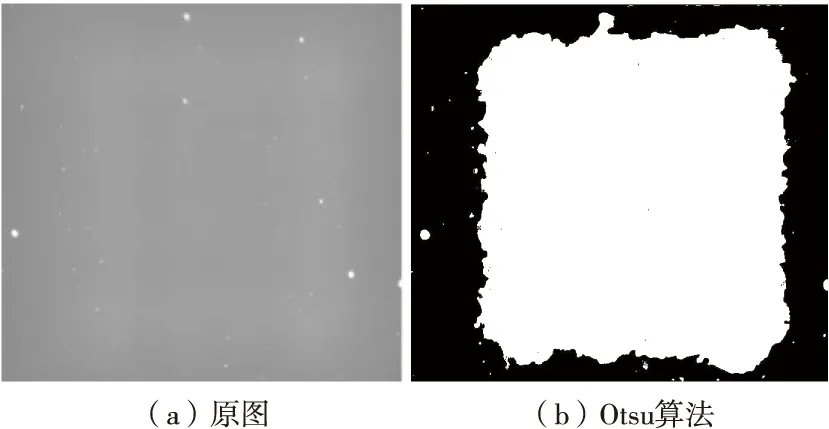
图1 Otsu算法处理结果Fig.1 Processing results of Otsu algorithm
在高反射镜疵病图像,常见的疵病为点状疵病,图像中疵病信息所占像素比背景所占像素要少很多,且因光照原因导致疵病亮暗分布不均匀,部分光照较弱的疵病很容易被划分为背景,图1(b)为Otsu阈值处理后的疵病图,会出现严重的过分割现象。仅利用传统的图像分割算法无法有效地处理高反射镜疵病图像。
2 基于形态学运算和图像融合的分割算法
本文提出一种基于形态学运算和图像融合的分割算法,能更好地分割疵病,算法流程如图2所示。首先利用形态学算法对获取的疵病图像校正,接着利用Canny算子来获取疵病图像的边缘轮廓,根据轮廓跟踪定位并提取图像中的疵病信息,将提取的疵病图像与原疵病图像分解成基础层和细节层,按照一定比例融合细节层和基础层,最后重建图像,对重建后的图像进行迭代法阈值处理。

图2 疵病分割算法流程图Fig.2 Defect segmentation algorithm flow chart
2.1 数字形态学处理
通过对疵病图像的阈值处理,可以发现一般的阈值方法无法有效地将目标疵病信息和背景信息分割出来,因此需要采用数学形态学的相关算法来解决这些问题[5]。
通过闭、开运算,首先对目标图像内部区域中存在的小孔洞进行了填充,同时在几乎不改变目标区域的前提下对该目标区域的边界进行平滑,去除了边缘的毛刺像素点的干扰,分开了细微之处的连接,并且通过形态学处理疵病图像,增强了目标疵病的特征,便于后续对疵病连通区域的像素标记和位置提取。
如图3所示,疵病图像在经过形态学的开闭运算后疵病周围因灰尘带来的细小噪点信息被很好地抑制,图像的不均匀性得到较好的改善。但可能存在部分疵病间断桥的误连接,从而改变了疵病原本的信息,造成检测的误差。通过形态学处理可以完整地获取疵病的位置信息,在对原图中该区域内的疵病进行处理,可以在不改变疵病原本形态的情况下,提取到疵病信息,提高检测的精度。

图3 形态学闭开运算Fig.3 Closed and open operations of morphology
2.2 边缘提取和疵病定位
采用暗场显微散射获得的疵病图像,存在光散射的地方为疵病呈亮像,不存在的地方则为暗背景,在疵病的边界处存在明显的分割,采用边缘提取的方法可以很好地获取疵病的边缘轮廓信息[6-7],本文采用Canny算子提取疵病边缘轮廓。
Canny边缘检测方法使用两种不同的阈值分别检测强边缘和弱边缘,并且仅当弱边缘与强边缘相连时才将弱边缘包含在输出图像中,因此这种方法容易检测出真正的弱边缘,且具有较强地抑制噪声能力。
在获取疵病的边缘轮廓后,通过轮廓跟踪标记并定位疵病信息,如图4所示分别为划痕和麻点疵病信息的定位。

图4 疵病图像的定位Fig.4 Localization of defect images
2.3 疵病图像的融合
将提取到的疵病图像与原图像分解成细节层和基础层,采用均值滤波器分解可以获取基础层[8],如式(2)所示,I1(x,y)和I2(x,y)为提取的疵病图像和原疵病图像,h为均值滤波器,φ1(x,y)、φ2(x,y)为分解后的基础层信息。
(2)
用原图信息减去基础层得到细节层φ1(x,y)、φ2(x,y),如式(3)所示:
(3)
按照一定比例融合细节层如式(4)所示,因疵病信息在整幅图像中所占的比例较少,本文按照A=0.8和B=0.2的比例融合细节层。
φ=Aφ1(x,y)+B2φ(x,y),(A+B=1)
(4)
最后,将融合的细节层和原图的基础层重建,如式(5)所示:
γ(x,y)=φ(x,y)+φ(x,y)
(5)
重建图像如图5所示,将提取到的疵病信息和原图融合,在不改变疵病大小的情况下,增强了疵病的信息,能有效地计算图像分割的阈值T,便于疵病图像的分割处理。

图5 重建图像Fig.5 Reconstruction of image
2.4 基于形态学运算和图像融合的分割算法
本文的算法可分为以下几个步骤:
1) 对获取的疵病图像灰度处理,观察疵病的形状,选择合适的结构元素对疵病进行形态学闭开运算,移除较暗的斑点和枝干标记;
2) 通过Canny算子对形态学校正后的图像处理,获取疵病的边缘轮廓;
3) 通过轮廓跟踪定位疵病,获取目标区域的位置信息并提取;
4) 基于双尺度分解的融合方法,将提取的目标区域图像与原图融合,获取融合后的图像;
5) 最后融合后的图像进行Otsu阈值处理。
该方法利用形态学处理校正疵病,更完善地保存了疵病信息,通过Canny边缘算子和轮廓跟踪,较大程度地定位疵病的区域,再基于双尺度分解的方式将提取的疵病图像与原疵病图像融合,最后再对融合后的疵病图像进行阈值处理。较大程度解决了因环境光而造成图像灰度不均匀现象,能有效地提取疵病目标,本文算法处理结果如图6所示。

图6 本文算法处理结果Fig.6 Algorithm processing results in this paper
根据Rayleigh-Rice矢量微扰理论,可以得到均方根表面粗糙度σ与TIS的关系为,如式(6)所示:
(6)

高反射镜背向散射率的检测要求为总积分散射率在10~100 ppm,即1×10-6≤TIS≤1×10-5,0.2 nm≤σ≤0.7 nm,通过对表面粗糙度的定义,可获得疵病的阈值范围为3.8~8.3 μm,目前通过目视法25倍显微镜放大,能够检测到的麻点为4.4 μm,因此综合考虑,直径大于4 μm,面积大于50 μm的为所检测的目标。
通过图6可以看出,该算法不仅抑制了因空气中灰尘所产生的噪点,还解决了因背景不均匀带来的图像过分割问题,能有效地将图像中的麻点信息和背景分割。为确定实际物体与图像上物体对应的比例关系,如式(7)所示,其中,K为转换系数,L为实际尺寸,P为测得的像素值,本系统中K=0.83,为满足实际检测需求,通过最小外接矩形的方法提取图中直径大于4 μm作为检测目标,如图7所示,共检测出7个疵病,其参数如表1所示。

图7 筛选后的疵病图像Fig.7 Images of selected defects

表1 检测出的疵病信息Tab.1 Information on detected defects
(7)
3 实验结果及分析
为验证本文算法的精确性,用标定板来代替划痕疵病,如图8所示,图像整体大小为141 pixel×138 pixel,每个棋盘格大小为30 pixel×30 pixel。通过对实际尺寸和像素的比例换算,可得棋盘格实际大小为25 μm×25 μm,选取了不同清晰度下的10幅图像进行处理,并提取其长度、宽度、面积等信息。选取能量梯度函数(EOG)来评级图像的清晰度,其反映了图像灰度之间的变换大小,EOG越大图像越清晰,EOG越小图像越模糊。图9为10幅图像清晰度的变化曲线图。图10为EOG为7.5×106的情况下,标准划痕图像分别以Otsu算法和本文算法处理的结果对比图。表2为两算法处理结果,可以看出Otsu算法处理清晰度较差的图片时,其边缘毛刺处理结果较差,其与实际结果相差6~12 μm,而本文算法较好地提取了目标疵病并完善了图像细节,能完整地保留疵病信息。
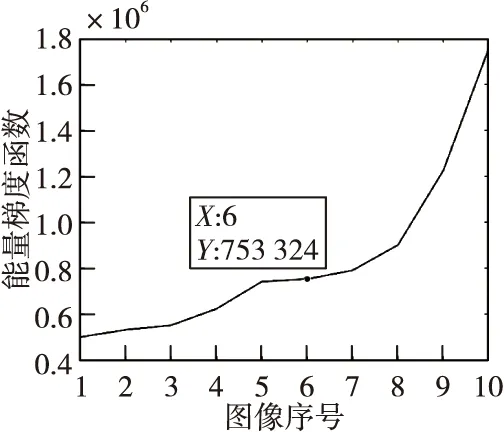
图9 10幅图像EOG变化曲线图Fig.9 EOG curve of 10 images

图10 标准板图像Otsu算法和本文算法对比结果Fig.10 Comparison results of standard board image Otsu algorithm and the algorithm in this paper
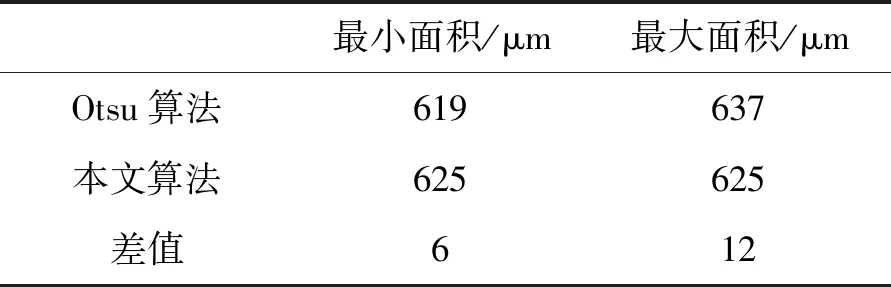
表2 Otsu算法和本文算法对比结果Tab.2 Comparison results of Otsu algorithm and the algorithm in this paper
表3是使用本文算法对不同清晰度下的标准板图像的处理结果。

表3 10幅标准板图像分割结果Tab.3 10 Segmentation results of 10 standard plate images
由表3可以看出当标定板图像的能量梯度函数E>7.5×105时,本文算法识别的精度与标准板实际尺寸一致;当5.0×106 本文提出基于形态学运算和图像融合的疵病图像分割算法。该算法利用形态学的方法对疵病校正,完善了疵病信息,避免疵病图像在采集过程中光照不均匀的问题,并通过边缘算子和轮廓跟踪的方法定位和提取疵病的目标区域;再将提取的疵病图像与原疵病图像融合完整地保存了疵病信息;最后通过对融合后的图像进行分割处理来提取目标疵病。仿真结果表明,本文算法能满足实际检测要求,有效地完成了对疵病图像分割,提高了后续疵病的识别和特征提取的准确性,在光学元件疵病检测领域具有较好的应用前景。4 结论
猜你喜欢
中国药学药品知识仓库(2022年9期)2022-05-23
齐鲁艺苑(2022年1期)2022-04-19
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
智能计算机与应用(2020年4期)2020-08-31
通信产业报(2016年44期)2017-03-13
科技视界(2016年26期)2016-12-17
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13
