基于SolidWorks的无人机起降平台设计*
2021-04-29 03:22刘新超林振霞郁梦婷孙维浩赵军帅王凯任成昊王虓
科技与创新 2021年8期
刘新超,林振霞,郁梦婷,孙维浩,赵军帅,王凯,任成昊,王虓
基于SolidWorks的无人机起降平台设计*
刘新超,林振霞,郁梦婷,孙维浩,赵军帅,王凯,任成昊,王虓
(山东理工大学,山东 淄博 255000)
利用SoildWorks设计一种无人机起降平台,通过软件三维建模功能建立各零部件模型和装配体模型。平台通过位置可调节式无人机承接平台结构和电池更换结构为基础,通过电路辅助,实现对无人机的承接,并通过容差式推送仓与机械夹,对无人机更换电池,从而实现无人机的长时间续航。
SolidWorks;三维建模;无人机起降平台;续航力
1 引言
1.1 软件简介
SoildWorks是基于Windows操作系统推出的一套三维机械零件设计自动化软件。通过SolidWorks将三维零件进行装配,可动态查看装配体所有方向自由运动,并可以对零部件进行动态的干涉和间隙检查。SoildWorks凭借功能强大、参数特征造型、适配附件多的特点成为工业设计领域最常用的软件。本文将应用SolidWorks软件,对无人机起降平台进行零件设计、装配、干涉检查和运动仿真分析。
1.2 设计背景
随着无人机持有量逐渐增多、应用领域的不断扩大,人工降落误操作带来的坠机事故也时有发生。据统计,2019年至今山东省内超过60%的无人机坠机事故发生在起飞和降落阶段。当无人机预降落时,由于风力与仪器等因素影响,无人机的姿态和位置信息发生偏移,并且野外路面情况复杂,无法为无人机的降落提供理想场地。同时无人机自身负重及传感器作用电量损耗大而导致需频繁性降落进行电池更换。
1.3 解决思路
利用SolidWorks设计一款无人机起降平台,通过多尺度目标全景摄像头观测与人工遥控承接平台辅助升降,借自动更换电池设计对无人机进行电池更换,从而向野外作业的无人机提供平坦降落面以及有效解决电池续航力问题。
2 设计原理
2.1 机械设计
本文以大疆悟INSPIRE2系列为研究对象进行研究设计。为实现无人机安全承接与电池更换等功能,主要从位置可调节式无人机承接平台结构与电池更换结构两大设计出发。
大疆悟INSPIRE2型号无人机相关参数如表1所示。
表1 大疆悟INSPIRE2型号无人机相关参数
飞行器型号最大起飞质量/g轴距/mm桨距/mm最大下降速度/(m·s-1)最大可承受风速/(m·s-1)电池整体质量/g电池型号 大疆悟INSPIRE24 000 605(不含桨,降落模式)127 4 10 515 TB50
由以上参数与官方资料可得,在不安装螺旋桨的情况下轴距为605 mm、长42.7 cm、高31.7 cm、宽42.5 cm。对此以半径为30 cm的圆形平面为承接面。同时为了稳定无人机,增设2个机械夹,以便对降落下的无人机的位置进行固定。机械夹由1个舵机、1个底盘、2个半齿轮、2个夹子和4个杠杆组成。舵机逆时针转动带动2个齿轮逆时针旋转,起紧夹作用,而舵机顺时针转动带动2个齿轮顺时针旋转,起松夹作用。
机械夹模型如图1所示。
因无人机最大质量为4 000 g,所以需采用太空铝铸件做支柱。通过支柱,使承接面与承接平台运动结构连接。承接面与连接支柱模型如图2所示。
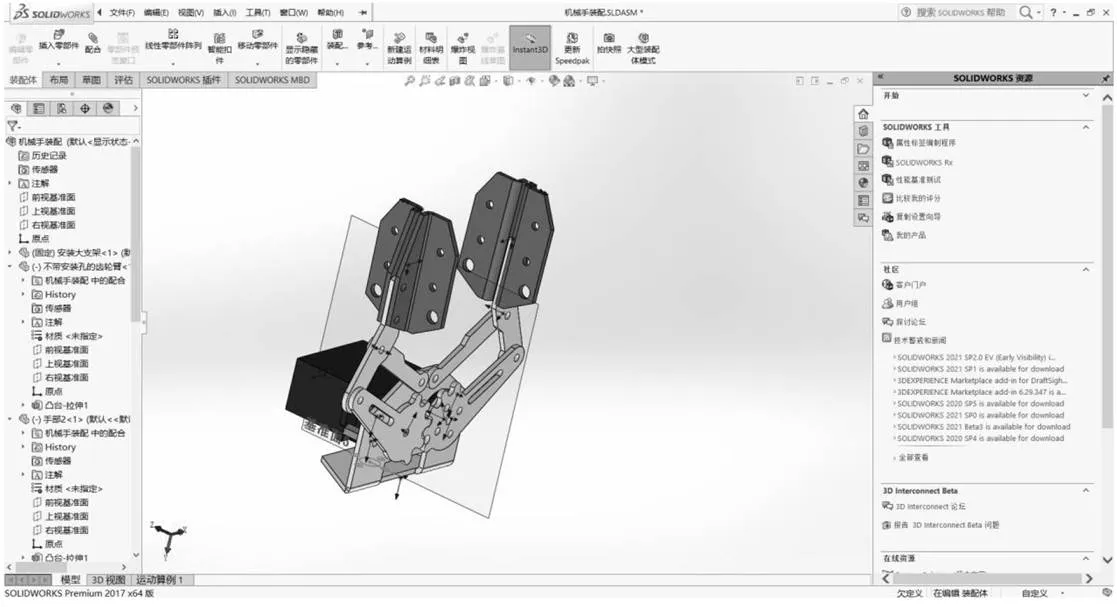
图1 机械夹模型图
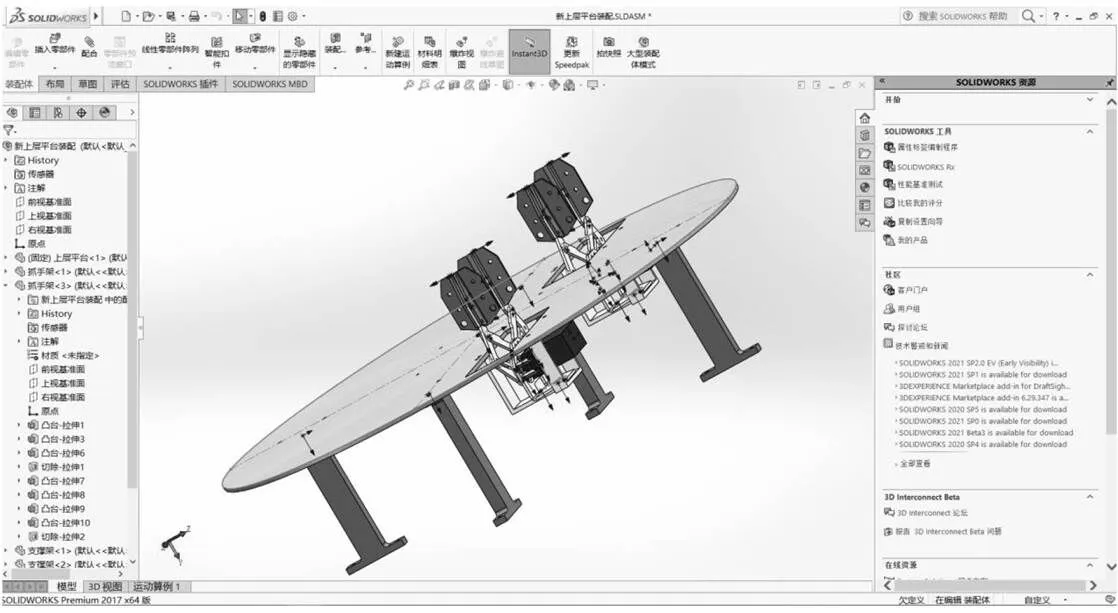
图2 承接面与连接支柱模型图
因无人机自动降落过程受风力与仪器的影响,会发生位置偏移,对此需使用位置可调节式无人机承接平台进行实时承接。
位置可调节式无人机承接平台设计如下:选用大疆M3508 P19直流无刷电机作为驱动电机,通过C620无刷电机调速器控制转动。将3508电机a水平放置带动平台轴方向移动,3508电机b竖直放置带动平台轴方向移动,运行方式简单且稳定。承接平台通过3508电机的转动,可以很容易地进行方向控制和跟踪,3508电机根据控制终端指令,快速执行运动。承接平台运动结构如图3所示。
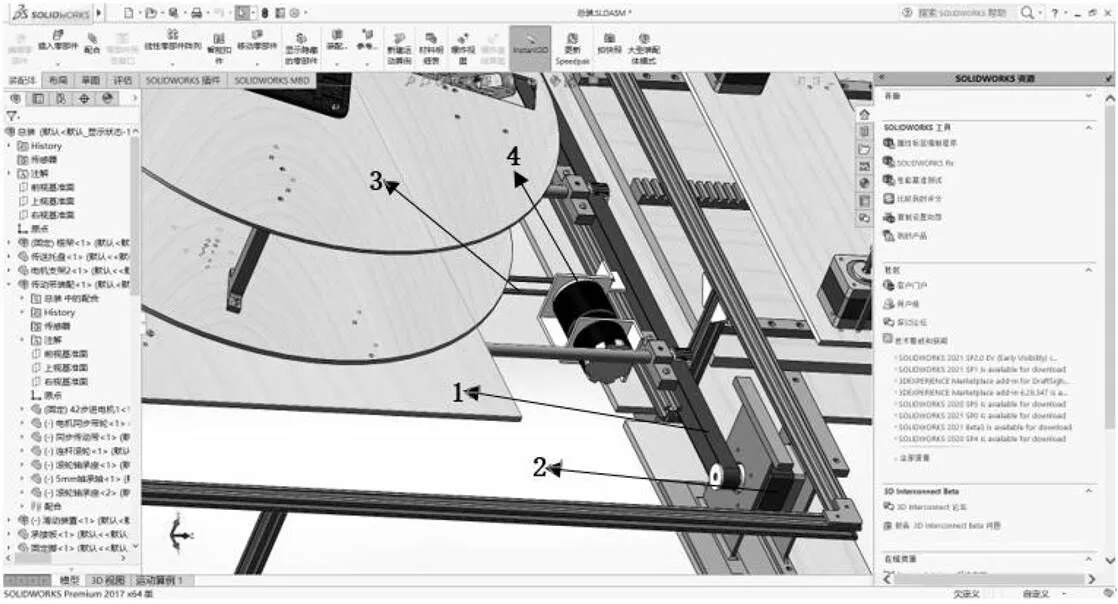
1—x轴联动履带;2—x轴驱动电机;3—y轴联动履带;4—y轴驱动电机。
具体运动方案如下。
以承接平台为原点建立-二维平面坐标系,如图4所示。因无人机降落过程受风力、仪器等影响发生偏移,执行人员通过承接平台上的摄像头反馈的视频中无人机飞行位置对承接平台进行遥控,调整承接平台位置,以实现无人机安全降落至承接平台表面。例如,当无人机位于承接平台左上方时,承接平台先以轴方向移动至与无人机同一纵轴方位,再以轴方向移动至无人机正下方。
由长100 cm、宽100 cm的太空铝框架做可调节式无人机承接平台整体高度支撑。可调节式无人机承接平台结构模型如图5所示。
针对机械滑轨滑动存在误差问题,改变现有对接仓结构设计,将直面式对接设计优化为曲面式对接仓。经初代产品的大量实物实验,发现电池在取送过程中仍存在对接误差(因机械带动式移动),而实物要求机械夹必须与无人机电池仓位置完美匹合,为解决以上问题,运用下面一种新的连接方法。
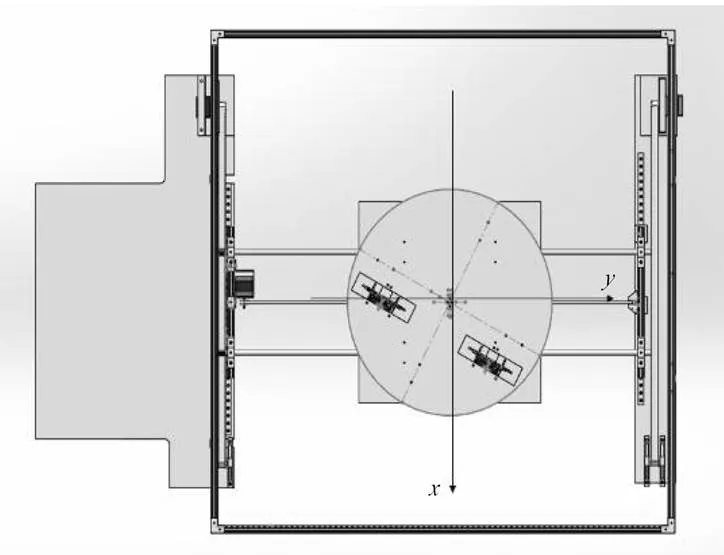
图4 承接平台二维坐标建立
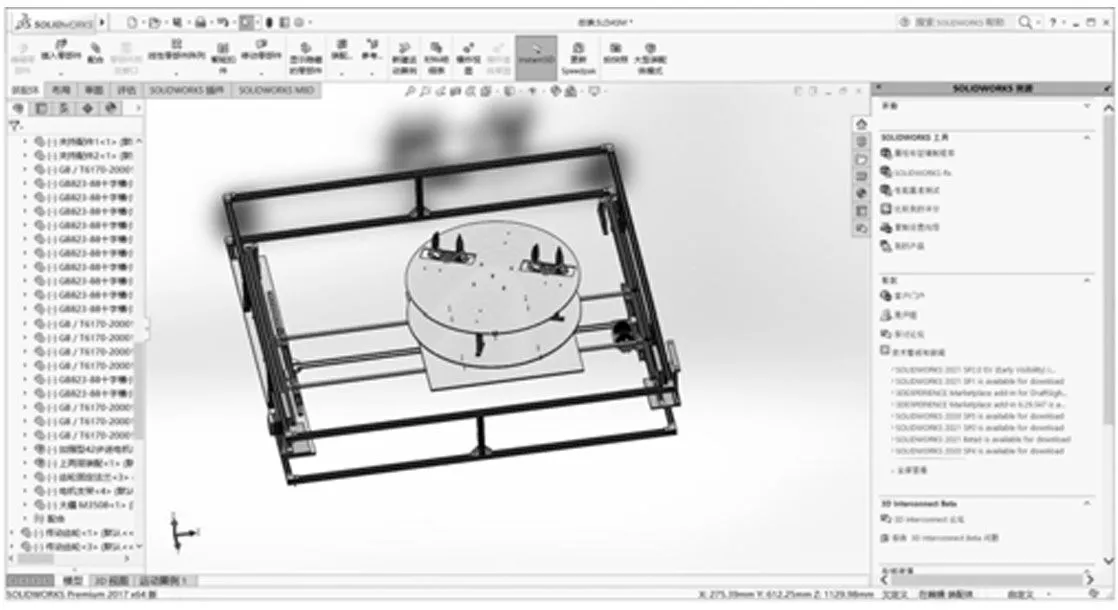
图5 可调节式无人机承接平台结构模型图
推送仓与推送杆通过轴承连接并于两者下方装有弹簧弹性连接,使推送仓具有灵活摆动性。在无人机电池仓固定情况下,借助无人机电池仓对容差式推送仓的反向力带动弹簧的灵活摆动,实现推送仓与无人机电池仓自由对接位置匹合。容差式推送仓模型如图6所示。
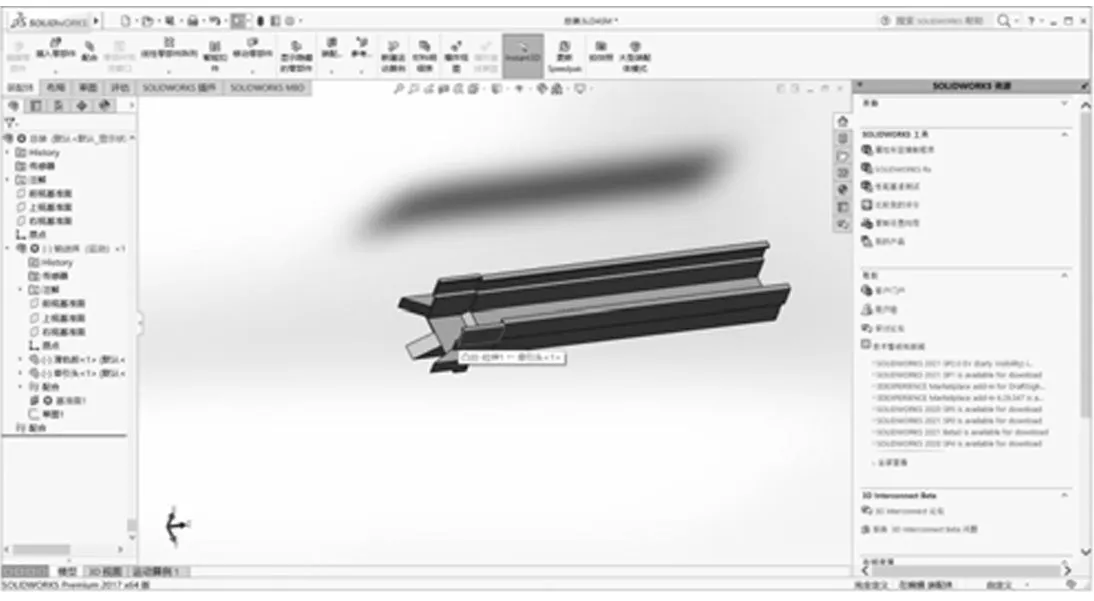
图6 容差式推送仓模型图
秉持“最简”理念,提出三维连体式电池仓设计结构,如图7所示。新旧电池仓在同一位置的设计使得电池夹路径精简。当旧电池放入旧电池仓后,通过电机的带动,新电池仓代替旧电池仓,可使机械夹直接将新电池推送至无人机电池壳内。
具体运动方案如下。
当承接平台位置回归过程结束时,电池更换结构在电机带动下经滑轨向无人机方向整体移动,容差式推送仓与无人机电池仓发生切合,推送杆在48式步进电机带动下前移,电池夹夹住无人机电池,48式步进电机反转相同相位,旧电池被牵引至旧电池存储仓,三维连体式电池仓凭借直流减速电机与连接结构左向移动,新电池仓取代旧电池仓,推送杆重复电池推送过程,新电池进入无人机电池仓,推送杆回到原位置,电池更换结构归位,无人机放飞。电池更换结构模型如图8所示。
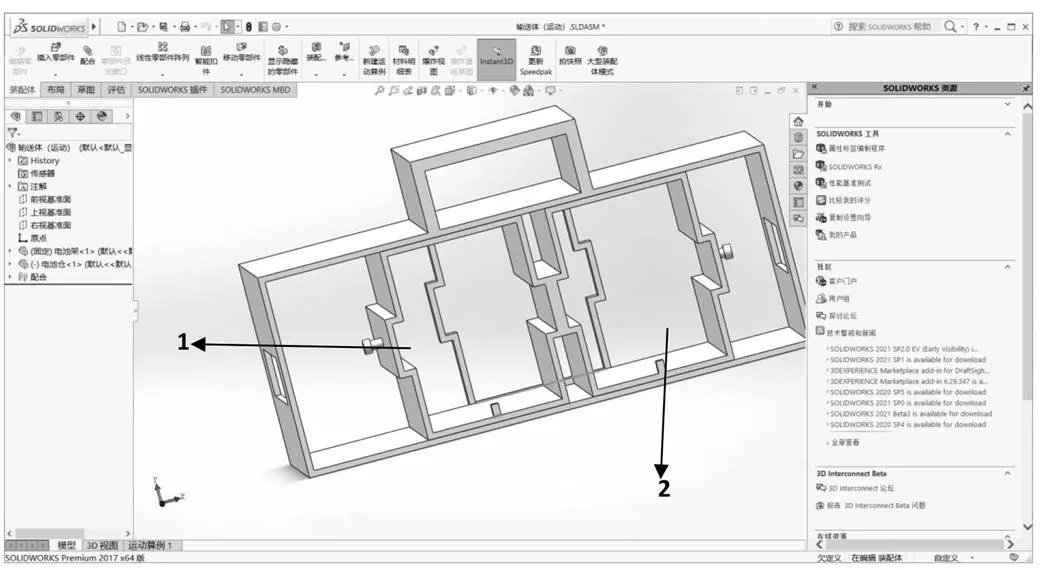
1—新电池仓;2—旧电池仓。
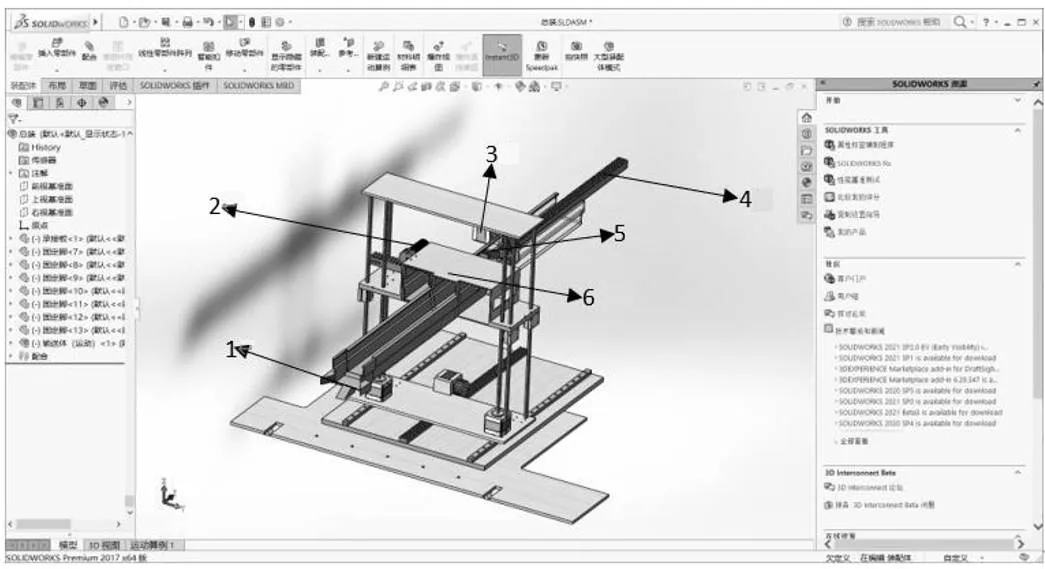
1—容差式推送仓;2—直流减速电机;3—48步进电机;4—推送杆;5—电池夹;6—三维连体式电池仓。
至此,无人机起降平台机械设计完成,如图9所示。
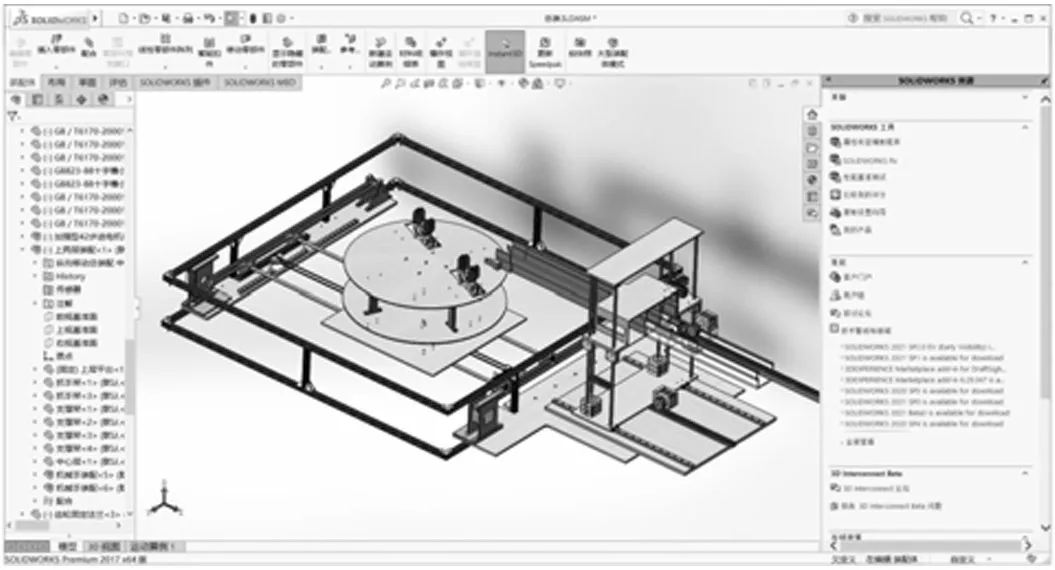
图9 无人机起降平台模型图
2.2 电路补充
为了实现起降平台整体运行,还需进行简单的电路补充。无人机起降平台整体流程如图10所示。
承接平台边缘夹持有小蚁摄像头SIM卡数据联网实时采集无人机位置,以便操作人员对承接平台位置遥控。采用2.4 g天地飞遥控器与STM32F103ZET6系列单片机做承接平台运动控制硬件。
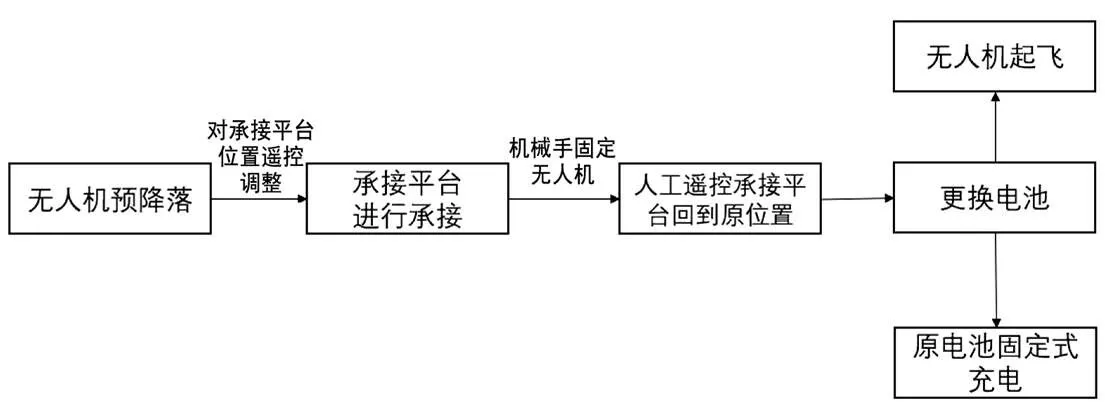
图10 无人机起降平台整体流程图
STM32F103ZET6单片机作为承接平台主控板,同时控制2个无刷电机调速器。采用C620无刷电机调速器驱动大疆M3508 P19直流无刷电机精确转动,从而实现承接平台-二维平面运动。整体采用闭环控制,精确控制电机转速达到运动所需的V1、V2,或者转动一个固定的角度。
电池更换结构以STM32F407为主控芯片,通过控制一个42步进电机、一个直流无刷电机与一个舵机完成电池更换具体方案。
3 实物测试
无人机起降平台实物模型如图11所示。容差式推送仓3D打印部件实物如图12所示。

图11 无人机起降平台实物模型图
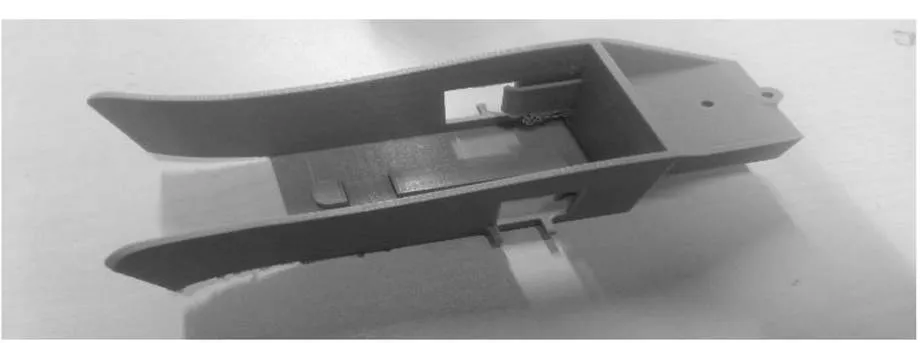
图12 容差式推送仓3D打印部件实物图
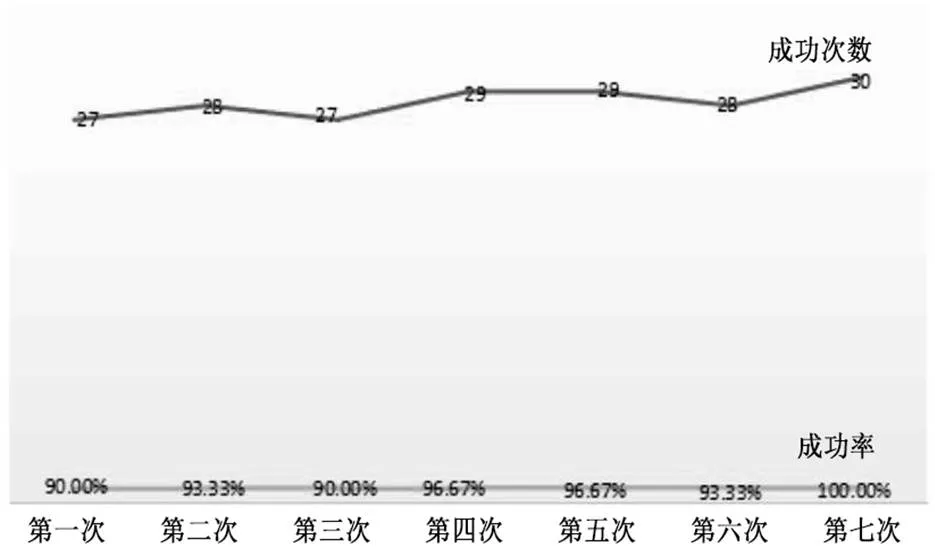
无人机降落时因受仪器、风速影响精确度达不到对接要求,纠偏设计以全方位、多角度移动来弥补降落偏差的缺陷。在200余次的降落测试中,降落在平台有效位置的成功率高达94%。在198次的成功降落中,在夹持机构有效范围内的次数高达195次。降落测试数据如图13所示。
在50次速度测试中,平均耗时保持在1 min45 s之内。
4 结论
基于SolidWorks的无人机起降平台是以位置可调节式无人机承接平台结构与电池更换结构为设计核心,借助SolidWorks构建无人机起降平台的模型。采用太空铝铸件做支柱,有效解决承载能力弱的问题。根据无人机承接平台搭载的摄像头所反馈的无人机实时飞行位置对承接平台进行遥控,调整承接平台位置,以实现无人机安全降落至承接平台表面。推送仓与推送杆通过轴承连接并于两者下方装有弹簧弹性连接,实现推送仓与无人机电池壳有阻尼对接。三维连体式电池仓中新电池仓借助直流减速电机运动代替旧电池仓,对快速更换电池起到至关作用。本设计可以解决现有无人机野外起降以及连续工作时存在的续航时间短的难题。
[1]张健.复合翼垂直起降无人机飞行控制技术研究[D].厦门:厦门大学,2018.
[2]梁月计,郭海斌,吴晓滨.可伸缩型无人机升降平台的研制[J].科技经济导刊,2018,26(27):81.
[3]李鹏波,张长伟,薛雪.轻型剪叉式升降平台结构分析与优化设计[J].建设机械技术与管理,2015(8):88-90.
[4]康立鹏.基于视觉导航的小型旋翼无人机目标识别自主降落系统研究[D].呼和浩特:内蒙古工业大学,2020.
[5]SHARP C S,SHAKERNIA O,SASTRY S S. A vision system for landing an unmanned aerial vehicle[C]//IEEE international conference on robotics &automation,2003.
[6]XU G,ZHANG Y,JI S,et al. Research on computer vision-based for UAV autonomous landing on a ship[J]. Pattern recognition letters,2009,30(6):600-605.
[7]嵇盛育,徐贵力,冯文玲.基于红外视觉的无人机自主着舰合作目标的研究[J].红外技术,2007,29(10):593-597.
[8]魏祥灰.着陆区域视觉检测及无人机自主着陆导引研究[D].南京:南京航空航天大学,2019.
V279
A
10.15913/j.cnki.kjycx.2021.08.008
2095-6835(2021)08-0025-04
刘新超(2000—),男,本科在读,学生,主要研究方向为电力系统巡检全自动化技术。
*国家级大学生创新创业项目(编号:S202010433005)
〔编辑:王霞〕
猜你喜欢
今日农业(2022年14期)2022-09-15
军事文摘(2022年14期)2022-08-26
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
电脑报(2022年13期)2022-04-12
汽车工程师(2021年12期)2022-01-18
计算机应用文摘·触控(2021年20期)2021-11-11
英才(2019年10期)2019-10-28
焦点(2018年10期)2018-01-28