基于无人机影像VDVI指数的植被覆盖度估算
2021-04-14 03:58凌成星刘华纪平胡鸿王晓慧侯瑞霞
森林工程 2021年2期
凌成星 刘华 纪平 胡鸿 王晓慧 侯瑞霞

摘 要:为快速准确获取防护林工程区植被覆盖度特征,掌握植被生长和生态环境评价重要指标,利用无人机高时间频率获取、高空间分辨率的特点,在陕西神木的三北工程樟子松防护林研究区进行实验,构建无人机可见光RGB波段差异性植被指数(VDVI)和HSV变换植被指数(HSVVI),并与同区域GF-1卫星NDVI指數进行相关性分析,建立无人机研究区的植被覆盖度估算模型,快速计算出植被覆盖度结果。研究表明,VDVI指数与NDVI指数具有更高的相关性,非常适用于像元二分模型的植被覆盖度估算模型建立,通过地面调查的植被覆盖度实测值与模型估算值精度验证,决定系数 R2为0.855 6,植被覆盖度估算精度达到81.35%,在研究区域得到较为理想的估算结果。由此也证明采用无人机影像可见光数据构建VDVI指数像元二分模型进行植被覆盖度估算是有效和准确的,可以为快速获取植被覆盖度特征服务。
关键词:无人机;CCD传感器;植被覆盖度;植被指数
中图分类号:S812 文献标识码:A 文章编号:1006-8023(2021)02-0057-10
Estimation of Vegetation Coverage Based on VDVI Index
of UAV Visible Image
——Using the Shelterbelt Research Area as An Example
LING Chengxing1,2, LIU Hua1,2*, JI Ping1, HU Hong3, WANG Xiaohui1,2, HOU Ruixia1
(1.Institute of Forest Resource Information Techniques, Beijing 100091, China; 2.Key Laboratory of Forestry
Remote Sensing and Information System of National Forestry and Grassland Administration, Beijing 100091, China;
3.Investigation, Planning and Design Institute of National Forestry and Grassland Administration, Beijing 100714, China)
Abstract:In order to quickly and accurately obtain the characteristics of vegetation coverage in the shelterbelt project area and master the important indicators of vegetation growth and ecological environment evaluation, experiments were carried out in the research area of Pinus sylvestris var. mongolica shelterbelt in Shenmu, Shanxi Province by using the characteristics of high time frequency acquisition and high spatial resolution of UAV. Different Vegetation Index (VDVI) and HSV Transform Vegetation Index (HSVVI) in RGB band of UAV visible light were constructed, and correlation analysis was conducted with the NDVI index of GF-1 satellite in the same region. Vegetation coverage estimation model was established in the UAV study area, and the results of vegetation coverage were quickly calculated. The results showed that VDVI index and NDVI index had a higher correlation, which was very suitable for the establishment of vegetation coverage estimation model of pixel binary model. Through the accuracy verification of the measured FVC value and the model estimation value, the determination coefficient R2 was 0.855 6, and the estimation accuracy of FVC was 81.35%, which was an ideal estimation result in the study area. It was also proved that the VDVI index pixel binary model based on visible light data of UAV images was effective and accurate for vegetation coverage estimation, which could serve for the rapid acquisition of vegetation coverage characteristics.
Keywords:UAV; CCD sensor; vegetation coverage; vegetation index
收稿日期:2020-11-15
基金项目:国家重点研发计划课题(2017YFC0506502)
第一作者簡介:凌成星, 博士,副研究员。研究方向为森林和湿地资源遥感监测理论和应用。E-mail: lingcx@ifrit.ac.cn
通信作者:刘华,硕士,研究员。研究方向为森林资源遥感监测和林业信息技术。E-mail: liuhua@ifrit.ac.cn
引文格式:凌成星,刘华,纪平,等.基于无人机影像VDVI指数的植被覆盖度估算——以陕西神木防护林工程研究区为例[J].森林工程,2021,37(2):57-66.
LING C X, LIU H, JI P, et al. Estimation of vegetation coverage based on VDVI index of UAV visible image - using the Shelterbelt research area as an example[J]. Forest Engineering,2021,37(2):57-66.
0 引言
目前,无人机技术已经在自然资源监测的各个方面取得了飞速的发展,无人机工作原理使其可以在低空飞行区域内解决星载和有人机遥感存在的不足,如:数据获取重访长、天气及含云量干扰大、影像数据的大气误差大、数据采集成本高[1]。通过无人机低空飞行技术和传感器遥感监测应用有机结合,形成了快速高效获取典型区域自然资源现状的优良手段[2],也为森林资源监测、森林生态评估等研究内容提供了新的技术工具和研究方向。在干旱和半干旱地区,植被覆盖的特征对于指示区域生态环境、防风固沙和水土保持等具有非常重要的作用。无人机低空监测技术可以在各种天气和环境条件下对重点区域进行无人机影像的拍摄,获取到地面测量和高空卫星遥感中间的空间尺度的高空间分辨率影像数据[3]。利用无人机遥感影像进行处理得到数字表面模型(DSM)、点云数据模型(Point Cloud)和正射影像模型(DOM)[4]。利用上述数据可以处理得到无人机可见光RGB波段数据的多种植被指数,比如目前在可见光中较为常用的红绿比值指数(RGRI)、归一化绿蓝差异指数(NGBDI)、蓝绿比值指数(BGRI)、红绿蓝植被指数(RGBVI)、归一化绿红差异指数(NGRDI)、过绿指数(EXG)和植被颜色指数(CIVE)等[5],有了这些初级产品的支持,即可进一步进行模型建立和因子计算,从而得到的植被类型空间分布特征[6]。在目前的研究现状中,植被覆盖度(Fractional Vegetation Cover, FVC)是可以比较直观地反映植被分布特征和生理生化参数指标性因子,并且已经有了很多植被覆盖度卫星遥感监测方面的研究,但如何通过无人机低空监测技术进行快速、准确、自动、可靠的监测,还处在探讨和研究阶段,这个研究方向也将是未来自然资源监测与评估的重要发展方向[7-8]。本研究建立了无人机CCD传感器数据采集和预处理技术方案,构建了无人机可见光波段差异植被指数特征和植被覆盖度的估算模型,快速获取到研究区植被覆盖度定量结果。
1 主要原理和方法
1.1 无人机可见光光谱特征植被指数和模型
在植被覆盖度遥感估算中比较可靠的是基于影像像元二分统计理论模型,简称为像元二分模型[9]。模型原理是将遥感影像数据中最小成像单元,即每个像元为基本对象,代表是否有植被覆盖的两种情况来进行判断统计,并且进一步以统计量化数值作为植被覆盖程度指示性指标和比率[10]。在具有近红外波段的遥感影像中,常计算归一化植被指数(Normalized Differential Vegetation Index,NDVI),以其丰富的植被指示性特征来表现植被覆盖度[11]。虽然无人机的CCD传感器不具有近红外波段,不能直接应用于模型估算,但笔者在研究中将这种模型引入到了无人机可见光影像中。利用红、绿、蓝3 个波段进行计算,构建结合3个波段反射率特性的差异性植被指数(VDVI),和将可见光影像经过HSV变换(H色调,S饱和度,V明度)后构建的HSV变换植被指数(HSVVI)来参与模型估算。通过比较得到研究区NDVI相关性高的植被指数来替代NDVI所具有的反映植被信息形成的准确植被覆盖度像元二分模型,以此达到具有良好效果的估算结果,计算公式为:
VVDVI=G-R+B2G+R+B2。(1)
式中:VVDVI为VDVI指数结果;G为绿光波段;R为红光波段;B为蓝光波段。
HHSVVI=H-S+V2H+S+V2。(2)
式中:HHSVVI为HSVVI指数结果;H为色调值;S为饱和度值;V为明度值。
FFVC=V1-VI soilVI veg-VI soil。(3)
式中:FFVC为植被覆盖度;VI为像元的植被指数值;VI soil为裸土或无植被覆盖像元植被指数值; VI veg为100%纯植被像元的VI值。
若定义计算区域内的遥感影像的2个像元a1和a2,其植被覆盖度通过调查已知值为f1和f2,并且计算区域内的遥感影像NDVI,得到像元a1和a2所对应的归一化植被指数值为VDVI 1和VDVI 2,按照公式(3)求解:
公式(4)、公式(5)中,若像元a1定义为计算区域的归一化植被指数最小值的像元,像元a2为计算区域的归一化植被指数最大值的像元。可得出fmin 、fmax、VI min 、VI max 数值并计算出VIs 和VIv的值。
在实际植被覆盖情况中,fmax=1,表示全部为植被覆盖,fmin=0,表示全部为非植被区域,完全没有植被覆盖。在本文中,考虑到无人机影像数据求算过程中所存在的图像误差,统计计算VDVI的最大值和最小值不能直接代入估算模型VI min和VI max,利用最大值和最小值像元统计量占比对VDVI数据置信度区间进行分析,确定VI min和VI max最可靠的统计取值置信度范围。
1.2 无人机可见光植被指数与NDVI的相关性分析
为了验证构造的无人机可见光植被指数在植被覆盖度估算中实验结果的有效性和稳定性,对相同研究区范围的NDVI指数进行相关性分析。确定VDVI和HSVVI两个指数与NDVI相关变量之间的关系,收集成对的指数数据结果,VDVI-NDVI和HSVVI-NDVI,并对成对数据集进行散点图描述和分析。通过散点图中所对应的VDVI-NDVI和HSVVI-NDVI的具体数值关系,统计其概率分布的可能性。如果取VDVI或HSVVI的值所对应的NDVI变量值取值不发生对应变化,说明二者之间无相关关系或者相关性较弱,若VDVI或HSVVI的值所对应的NDVI变量值产生了非常明显的分布变化规律,则二者之间具有相关性。这个时候通过计算VDVI-NDVI和HSVVI-NDVI两个变量之间的决定系数值R2就可以判断二者之间相关性的强弱程度,R2所得到的值为0到1,其值越大,说明相关性越强,反之则越弱,甚至无相关性。若散点图分布趋势为沿着横坐标轴往上,则变量之间是正相关特征,其中VDVI或HSVVI取值增加,NDVI也随着增加,同理减少的话NDVI也随着减少;反之,若散点图分布趋势为沿着横坐标轴往下,则变量之间是负相关特征,其中VDVI或HSVVI取值减少,NDVI值随着增加,VDVI或HSVVI变量取值增加,NDVI值会随着减少。通过计算构建的无人机可见光植被指数VDVI和HSVVI与NDVI的相关系数,分析二者之间的相关特性和模型准确性,即可确定优良的估算模型。
2 实验结果与分析
2.1 研究区确立
本研究选取了位于陕西榆林地区的神木县三北工程的樟子松防护林作为研究区,该区域地处陕北黄土丘陵向内蒙古草原过渡地带,年平均气温8.5 ℃、降水440.7 mm, 研究区位置如图1所示。1978年至今,榆林地区一直被列为国家防沙治沙重点区域,“三北”防护林体系建设、防沙治沙和退耕还林等多项林业生态工程先后在该地区实施并取得了良好的效果。神木县作为榆林地区第一大县,气候特征和三北工程实施状况非常具有典型性和代表性,掌握该地区植被覆盖度的分布特征,对于三北防护林区域的生态环境恢复状况的分析评估也非常有意义。
2.2 数据获取
(1)卫星遥感数据
获取到2018年8月15日与无人机实验时间基本一致的高分1号卫星WFV传感器的存档数据,空间分辨率16 m,具有近红外的多光谱数据(红、绿、蓝、近红外4个波段)。本次实验使用的是高分1号的WFV1传感器,为了计算出更为准确波段反射率数值,按照标准的辐射定标系数进行辐射定标和校正(表1)。WFV1传感器成像的幅宽范围达到800 km,使用研究区的矢量范围裁剪出GF-1卫星影像的源数据,为后续数据处理做准备。如图2所示。
(2)无人机数据
研究中采用了大疆的PHANTOM 4 RTK小型多旋翼高精度航测无人机飞行平台进行飞行和数据采集,飞行器飞控系统可以精确记录坐标位置、姿态、采集数据置信度、镜头标定和任务完成量等实时参数,满足研究所需的垂直拍摄影像输出需求。
2018年9月16日,前往神木市大柳塔镇进行无人机采集工作,以在陕西榆林神木的三北工程区樟子松防护林研究区飞行采集为例,通过飞行任务区多次断点续飞数据采集,获取到了1.57 km2研究区范围的无人机数据,共计733张影像,理论空间分辨率为0.05 m,具体飞行参数见表2,在相同区域范围对地面的土地覆盖类型进行了地面调查和遥感解译定标工作,如图3所示。
在设计飞行的重叠度时,为了保证得到的无人机采集影像覆盖没有缺失和更好的后期拼接处理,在飞行路线设置了85%航向重叠和70%的旁向重叠。为了获取更合理采集影像的空间分辨率和高精度的数字表面模型(DSM),确定研究区的飞行高度为100 m,保证理论空间分辨率优于5 cm,单次起降采集面积可以覆盖0.5 km2。如图4所示。采用的是优于有效像素2 000 万像素镜头,设置不同采集环境的镜头参数。采集时间为上午10:00到下午2:00之间,太阳充足,高反射地表,ISO设置为100,快门时间1/1 000 s,补光EV为0或-0.5。
2.3 研究方法
2.3.1 无人机数据预处理
无人机数据的预处理是制作正射影像和为后续提供源数据信息提取和分析的关键过程。将采集到的无人机影像进行快速的预处理流程,包括影像匹配、空中三角测量、正射纠正及镶嵌等步骤,在这个过程中,对影像的空间分辨率、坐标系统和图像波段等信息进行构建,并生成研究区的无人机正射影像结果,如图5所示。
影像匹配:对无人机影像特征点提取和同名点匹配。由于无人机是低空获取影像,超高清镜头所拍摄的照片像素非常高,既带来了高空间影像分辨率的优点,同时也带来了幅宽较低、单张影像几何形变大、影像局部纹理变化复杂的难度,所以无人机影像匹配更加重要。通过提取每张影像特征點,从典型地物纹理、距离和搜索匹配性进行相邻影像同名点匹配及粗差点剔除,建立相邻影像相对位置关系,处理过程如图6(a)所示。
空中三角测量:利用初始位置及姿态信息,结合影像匹配连接点信息,进行空中三角测量,获得监测区域影像精确多角度定位信息。本实验考虑到研究区所处区域环境因素,人工在无人机飞行沿线布置地面控制点难度较大,且采用了RTK网络实时差分的无人机数据获取技术,可以实现无控制点状态下采集到的影像达到厘米级定位精度,保证后期处理影像的几何精度误差能够达到1~2个像元,即定位精度优于10 cm,处理过程如图6(b)所示。
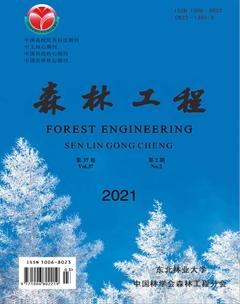
正射纠正:利用每张影像空三测量结果得到的精确参数,结合正射纠正模型进行影像重采样,对采集到的地物影像倾斜状态进行纠正,利用到了数字表面模型特征和像元级的垂直纠正技术,计算出单张原始无人机影像的几何变形和正射结果,然后对纠正后的影像进行匀色、拼接,最终得到真正射纠正后的正射影像和DSM模型的结果,如图7所示。
2.3.2 VDVI和HSVVI指数及相关性分析
采用公式(8)计算研究区GF-1WFV卫星数据的归一化植被指数NDVI(公式中用NNDVI表示)。
NNDVI=(Bnir-Bred )/(Bnir+Bred)。 (8)
式中:Bnir为GF-1 WFV数据的近红外波段;Bred为GF-1 WFV数据的红光波段。
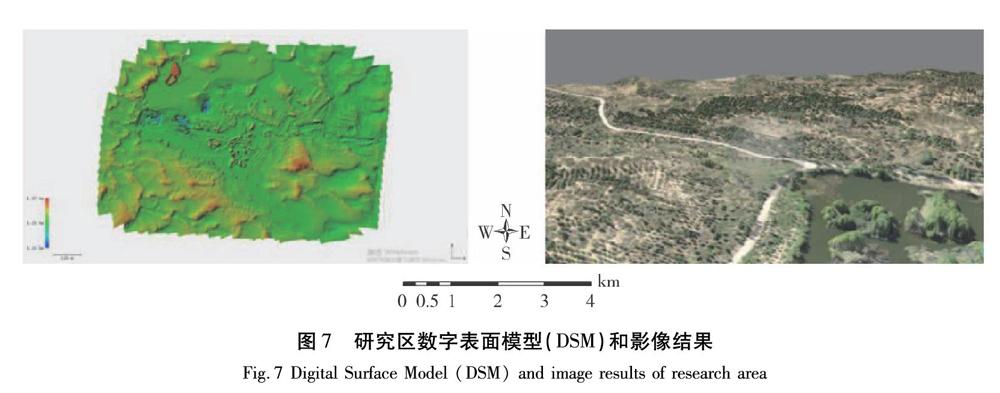
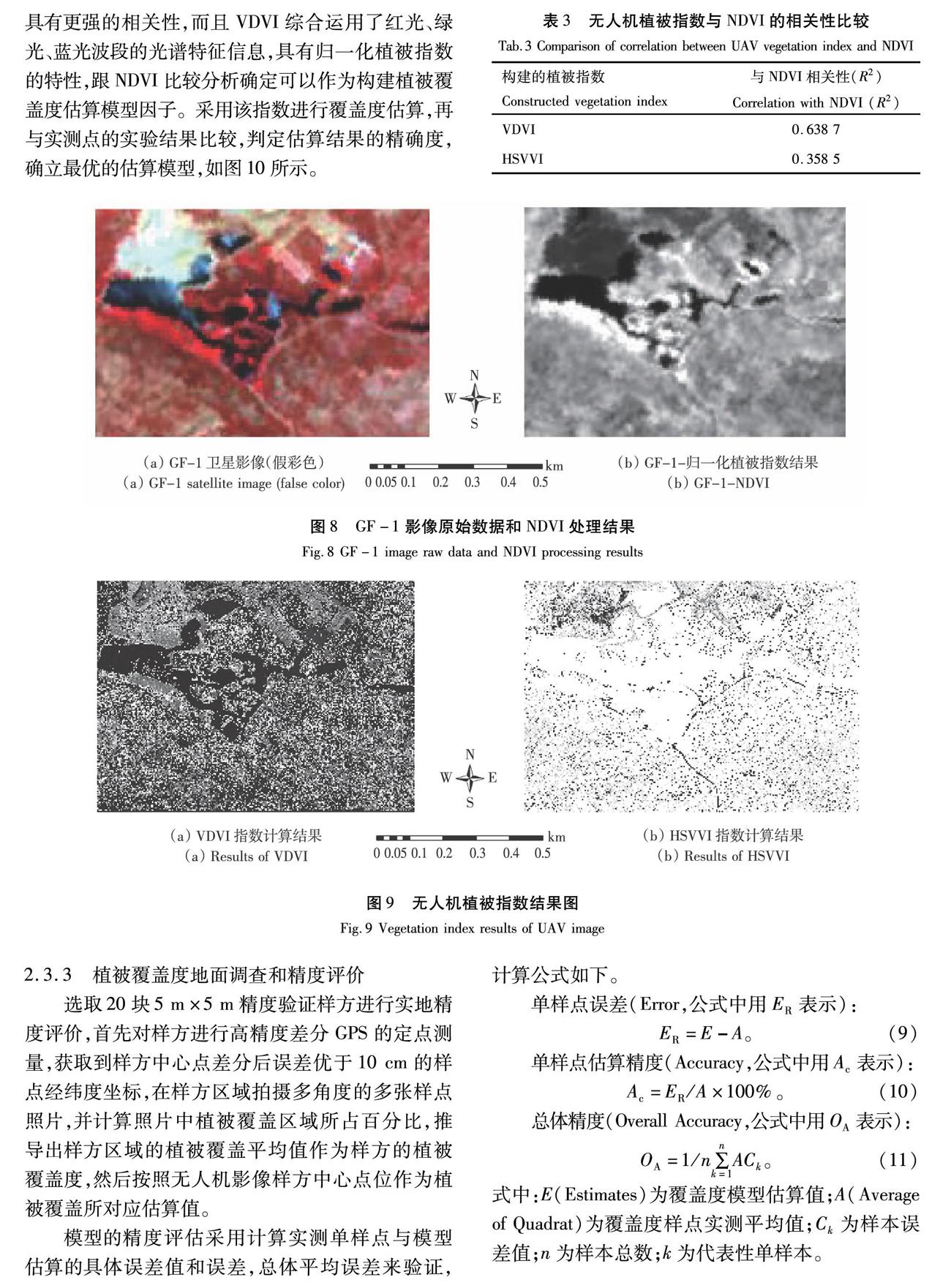
为了验证本研究中构造的植被指数估算实验结果的有效性和稳定性,对比相同研究区范围的GF-1卫星数据的NDVI和无人机影像植被指数,随机采样38个相关性分析点,得到每个点的NDVI、VDVI和HSVVI数值,并进行散点分析,判断NDVI-VDVI和NDVI-HSVVI的相关性分析结果(表3),如图8和图9所示。HSVVI与NDVI 的相关系数(0.358 5) 低于VDVI与NDVI 的相关系数(0.638 7) ,VDVI与NDVI具有更强的相关性,而且VDVI综合运用了红光、绿光、蓝光波段的光谱特征信息,具有归一化植被指数的特性,跟NDVI比较分析确定可以作为构建植被覆盖度估算模型因子。采用该指数进行覆盖度估算,再与实测点的实验结果比较,判定估算结果的精确度,确立最优的估算模型,如图10所示。
2.3.3 植被覆盖度地面调查和精度评价
选取20块5 m×5 m精度验证样方进行实地精度评价,首先对样方进行高精度差分GPS的定点测量,获取到样方中心点差分后误差优于10 cm的样点经纬度坐标,在样方区域拍摄多角度的多张样点照片,并计算照片中植被覆盖区域所占百分比,推导出样方区域的植被覆盖平均值作为样方的植被覆盖度,然后按照无人机影像样方中心点位作为植被覆盖所对应估算值。
模型的精度评估采用计算实测单样点与模型估算的具体误差值和误差,总体平均误差来验证,计算公式如下。
单样点误差(Error,公式中用ER表示):
ER=E-A。(9)
单样点估算精度(Accuracy,公式中用Ac表示):
Ac=ER/A×100%。 (10)
总体精度(Overall Accuracy,公式中用OA表示):
OA=1/n∑nk=1ACk。(11)
式中:E(Estimates)为覆盖度模型估算值;A(Average of Quadrat)为覆盖度样点实测平均值;Ck为样本误差值;n为样本总数;k为代表性单样本。
2.4 植被覆盖度估算
植被覆盖度的定义是指植被的枝叶和茎在地面的垂直投影面积所占区域的百分比,因为本文研究区所处环境为干旱半干旱地区,植被较为稀疏,以无人机正射影像进行植被覆盖度估算从理论上可以从空间的垂直投影方向更为准确地反映植被覆盖特征。将计算得到的VDVI值引入公式(3),因为VDVI跟NDVI是呈负相关趋势,所以将其中VDVIsoil和VDVIveg分别采用VDVI数据中单元像元积累频率为4.81%和94.9%的VDVI值来代替,值越大的说明植被覆盖越少,值越小说明覆盖度越高。在计算过程中,通过统计结果得到VDVIsoil=0.890 196,VDVIveg=-0.019 608。另外,对VDVI>0.890 196的情况FFVC取值为0,即FFVC=0,全部不被植被覆盖; VDVI<-0.019 608时,100%全部为植被覆盖。把所有因子数值代入模型,计算出了植被覆盖度的灰度图(0~1取值范围)结果,按照5级分级标准0%~20% 、20%~40%、40%~60%、60%~80% 、80%~100%,生成基于无人机影像可见光植被指数VDVI指数的像元二分模型植被覆盖度估算分级结果,通过各个级别植被覆盖度统计出研究区整体植被覆盖度为39.23% 。总体来看,该区域是三北防护林工程的樟子松人工造林模式区域,有天然水源和人工水渠的分布,人工樟子松林和自然的灌木、草本层植被分层清晰,植被覆盖较为密集,总体植被覆盖度分级特征符合植被类型分布的空间特征,尤其在研究区中间水源周边比较集中分布,人工造林区域多数分布高大的乔木林,周边区域灌木和草本植物自然零星分布,相对于整个神木地区来比较,具有更高的植被覆盖度。如图11所示。
2.5 结果精度分析
覆盖度实际测量值和模型估算值误差具体数值见表4,通过计算样点覆盖度的平均值、估算值,以及单样点具体误差和估算精度、总体估算精度来对模型的估算结果进行精度评估,决定系数R2为0.855 6,估算精度达到了81.35%,按本文方法可以在研究区域得到理想的植被覆盖度估算结果,由此也证明采用无人机影像可见光植被指数VDVI指数的像元二分模型植被覆盖度估算是有效和准确的,如图12所示。
3 结论与讨论
本研究以高空间分辨率的无人机可见光影像作为数据源,将像元二分法的植被覆盖度估算模型引入到无人机数据的植被覆盖度进行快速估算,在西北榆林地区的防护林工程区域构建了基于可见光波段的VDVI指数和对无人机可见光波段HSV变换后的HSVVI指数,并结合GF-1影像的NDVI指数与构建的指数进行相关性分析,确认了参与本研究中进行植被覆盖度估算模型VDVI指数的有效性和可靠性,通过模型计算得到研究区域的植被覆蓋度分级结果,通过实地精度评价测试数据与模型估算结果的数据对比,得到实测值与估算值决定系数R2为0.855 6,模型估算精度为81.35%,证明了该方法运用在无人机数据中的适宜性,尤其在属于干旱和半干旱区的三北防护林工程区,为无人机数据在森林资源监测应用中寻找到更有效的技术方法。因为不同工程区工程实施的造林模式不同,其植被类型也有所差异,为了提高植被覆盖度估算精度,并更好地为实际生产应用,还需要在下一步研究中对基于无人机可见光波段的植被指数和估算模型进行改良完善,增强结果的适应性范围,形成更加完备的技术流程和方法体系,为三北防护林工程森林资源监测服务。
【参考文献】
[1]蔡宗磊,苗正红,常雪,等.基于无人机大样方数据及国产卫星反演草地植被覆盖度方法研究[J].草地学报,2019,27(5):1431-1440.
CAI Z L, MIAO Z H, CHANG X, et al. Research on grassland fractional vegetation coverage inversion method based on drone large quadrat data and domestic satellite[J]. Acta Agrestia Sinica, 2019, 27(5): 1431-1440.
[2]李卓,孙然好,张继超,等.京津冀城市群地区植被覆盖动态变化时空分析[J].生态学报,2017,37(22):7418-7426.
LI Z, SUN R H, ZHANG J C, et al. Temporal-spatial analysis of vegetation coverage dynamics in Beijing-Tianjin-Hebei metropolitan regions[J]. Acta Ecologica Sinica, 2017, 37(22): 7418-7426.
[3]HUSSON E, REESE H, ECKE F. Combining spectral data and a DSM from UAS-images for improved classification of non-submerged aquatic vegetation[J]. Remote Sensing, 2017, 9(3): 247.
[4]许玉鳳,陆承红,潘网生,等.基于MODIS的贵州省黎平县植被变化[J].森林工程,2017,33(6):6-10.
XU Y F, LU C H, PAN W S, et al. MODIS-Based vegetation change in Liping County of Guizhou[J]. Forest Engineering, 2017, 33(6):6-10.
[5]宋清洁,崔霞,张瑶瑶,等.基于小型无人机与MODIS数据的草地植被覆盖度研究:以甘南州为例[J].草业科学,2017,34(1):40-50.
SONG Q J, CUI X, ZHANG Y Y, et al. Grassland fractional vegetation cover analysis using small UVAs and MODIS: a case study in Gannan Prefecture[J]. Pratacultural Science, 2017, 34(1): 40-50.
[6]刘婷,包广道,张大伟,等.基于植被指数的GF-2影像防护林快速提取研究[J].森林工程,2018,34(6):17-23.
LIU T, BAO G D, ZHANG D W, et al. Research on rapid extraction of shelter forest using GF-2 images based on vegetation indices[J]. Forest Engineering, 2018, 34(6):17-23.
[7]郭震冬,顾正东,许盛,等.利用无人机技术进行社区植被覆盖率调查[J].北京测绘,2017,30(5):88-91.
GUO Z D, GU Z D, XU S, et al. UAV-based investigation of community vegetation coverage[J]. Beijing Surveying and Mapping, 2017,30(5): 88-91.
[8]陶欢,李存军,谢春春,等. 基于HSV阈值法的无人机影像变色松树识别[J]. 南京林业大学学报(自然科学版), 2019, 62(3): 99-106.
TAO H, LI C J, XIE C C, et al. Recognition of red-attack pine trees from UAV imagery based on the HSV threshold method[J].Journal of Nanjing Forestry University (Natural Science Edition), 2019, 62(3): 99-106.
[9]汪小钦,王苗苗,王绍强,等.基于可见光波段无人机遥感的植被信息提取[J].农业工程学报,2015,31(5):152-159.
WANG X Q, WANG M M, WANG S Q, et al. Extraction of vegetation information from visible unmanned aerial vehicle images[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(5): 152-159.
[10]韩东,王浩舟,郑邦友,等.基于无人机和决策树算法的榆树疏林草原植被类型划分和覆盖度生长季动态估计[J].生态学报,2018,38(18):6655-6663.
HAN D, WANG H Z, ZHENG B Y, et al. Vegetation type classification and fractional vegetation coverage estimation for an open elm (Ulmus pumila) woodland ecosystem during a growing season based on an unmanned aerial vehicle platform coupled with decision tree algorithms[J]. Acta Ecologica Sinica, 2018, 38(18): 6655-6663.
[11]高永平,康茂东,何明珠,等.基于无人机可见光波段对荒漠植被覆盖度提取的研究:以沙坡头地区为例[J].兰州大学学报(自然科学版),2018,54(6):770-775.
GAO Y P, KANG M D, HE M Z, et al. Extraction of desert vegetation coverage based on visible light band information of unmanned aerial vehicle: a case study of Shapotou region[J]. Journal of Lanzhou University (Natural Sciences), 2018, 54(6): 770-775.
猜你喜欢
农业与技术(2017年5期)2017-04-11
科技创新与应用(2017年6期)2017-03-23
计算机时代(2016年12期)2017-01-14
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26