
基于隐性危险驾驶人感知特性及判别模型研究*
2021-04-14 08:03魏田正李晨新朱秭硕刘浩学
中国安全生产科学技术 2021年3期
魏田正,林 淼,李晨新,朱秭硕,刘浩学,朱 彤
(1.长安大学 汽车学院,陕西 西安 710064; 2.中国汽车技术研究中心,天津 300300;3.长安大学 运输工程学院,陕西 西安 710064)
0 引言
随经济不断发展,居民生活水平提高,车辆社会保有量不断增加,交通安全问题日益凸出[1]。在人、车、路、环境构成的闭环系统中,只有驾驶人具有主观能动性,驾驶人感知、判断及操作错误将直接引发交通事故[2-3]。
20世纪50年代,Harold指出防御性驾驶理念核心是“预防”,危险感知是预防前提和基础;驾驶人危险感知能力可预测未来道路可能发生的危险事件,通过量化危险程度,采取相应避险措施[4-5];驾驶人在应急状态下驾驶行为具有一定规律性。因此,通过研究驾驶人危险感知及应急驾驶行为,对提高道路交通安全水平及驾驶人应急避险能力具有重要意义。
学者对道路交通危险类型进行系统分类。Vlakveld等[10]按照可见性将潜在道路危险分为显性危险和隐性危险,隐性危险指危险出现及发展过程部分或完全隐藏,考验驾驶人危险感知能力。然而,现有研究主要探究生理因素[11]、时间压力、分心活动以及驾驶技能自我评估等因素对驾驶人危险感知能力影响:杨京帅等[12]通过将事故树建模与实验测试结合,分析驾驶人危险感知影响因素;David[13]运用场景实验法比较新手与经验驾驶人危险感知能力差异;潘留栓[14]借助眼动技术探究时间压力对驾驶人危险感知影响;Briggs等[15]通过驾驶模拟实验发现,分心活动会增加驾驶人危险感知反应时间;Broberg等[16]通过视觉和认知测试、车辆驾驶以及半结构化深度访谈发现,驾驶技能自我评估越准确,驾驶适应性越好;秦雅琴等[17]运用模拟仿真研究风险驾驶情景中驾驶人感知与行为关系。虽然国内外学者对驾驶人危险感知能力研究取得一定成果,但对隐性场景中驾驶人驾驶行为及驾驶人危险感知能力研究相对较少。
本文选取6种典型危险场景,按照道路危险类型分为显性危险和隐性危险,构建3种交通冲突仿真场景,开展驾驶模拟实验,通过对驾驶人驾驶行为及危险感知能力分析,基于Bayes判别法建立驾驶人危险感知能力预测模型,以期为驾驶人安全驾驶及安全培训提供参考和借鉴。
1 实验设计
1.1 实验对象

1.2 实验场景
结合实际道路情况,搭建道路虚拟驾驶场景,建立5条长直双向6车道城市道路作为实验道路,相邻道路间以交叉口连接,按照《城市道路工程设计规范》(CJJ 37—2012)道路限速60 km/h[19],按照《城市道路交通标志和标线设置规范》(GB 51038—2015)设置标志并施划标线[20]。道路两边设置树木、路灯及建筑物,人行横道前50 m设置注意行人标志,施工区前50 m处设置前方施工标志。驾驶车辆为普通中型轿车,初始速度为0 km/h,对向车道设置500 pcu/h交通流,通过设置动作触发点触发危险事件或动作轨迹变换。
道路危险分为显性危险和隐性危险,城市道路常见交通冲突类型包括被试车辆与轿车冲突(后文简称轿车交通冲突)、被试车辆与非机动车冲突(后文简称非机动车交通冲突)及被试车辆与行人冲突(后文简称行人交通冲突)。设置8个实验场景,包括2个干扰场景。危险场景描述见表1,危险场景示意图如图1所示。

表1 实验场景描述Table 1 Description of experimental scenes

图1 危险场景示意Fig.1 Schematic diagram of hazard scenes
1.3 实验流程
被试填写基本信息问卷,引导其至驾驶模拟器。
1)预实验:被试在练习场景中熟悉驾驶模拟器基本操作。
2)实验过程:被试严格遵守交通规则及指引,不得随意换道,超车;不能与场景中任何交通参与者发生碰撞或冲突,一旦发生碰撞,屏幕中间会出现“碰撞!”提示语,并辅以碰撞声音;发生碰撞后,车辆不会损毁,被试可继续完成剩余驾驶任务。
2 驾驶危险感知评价指标
为全面体现驾驶人在危险场景中驾驶行为,选取危险事件发生位置前150 m驾驶行为数据[21],提取行车状态、操控及反应时相关指标。其中,行车状态包括车辆平均速度与平均纵向加速度,反映驾驶人在危险场景中应对危险总体趋势。操纵相关指标包括反应率、方向盘旋转率、平均刹车深度:反应率为单个场景中作出避险反应驾驶人数与实验总人数比值;方向盘旋转率为方向盘转角变化速率;平均刹车深度表示驾驶人在某场景中制动踏板力输入值与最大制动力比值的平均值,平均刹车深度用0~1表示,0表示无制动输入,1表示完全制动。
WPKI技术是保障无线通信网络信息安全的有效方式,但是WPKI系统的建立需要强大的基础设施做支撑,且其证书状态管理难度较大、新增用户过程较为复杂。所以,在此基础上,一项名为IBC技术的新的无线通信网络安全技术得到了较大的发展,并被广泛应用于政务与私人领域。
为从微观角度展示驾驶人危险感知特性差异,反应时相关指标选取制动反应位置与归一化制动反应时间。将刹车深度大于最大刹车深度5%的制动作为有效制动[21],将危险场景开始位置与驾驶人做出有效制动反应位置差值作为制动反应位置。利用驾驶模拟器获得场景开始时间与驾驶人有效反应时间,将2者差值作为制动反应时间,考虑驾驶人每个场景中驾驶时长不等,将制动反应时间归一化处理,即归一化制动反应时间等于制动反应时间与该场景持续时间比值。选用交通冲突指标TTC(Time To Collision)作为驾驶人危险感知能力评价指标,TTC数值越小,表明发生交通事故可能性越大。
3 数据分析
以驾驶人在危险场景中是否做出有效制动为依据,得到驾驶人对危险场景反应率,如图2所示。驾驶人对隐性危险平均反应率为85.7%,对显性危险平均反应率为66.7%。由图2可知,在轿车、行人及非机动车交通冲突危险场景中,行人交通冲突场景反应率最高。轿车交通冲突显性危险场景,驾驶人反应率(45.7%)低于同类型隐性危险场景(71.4%)。
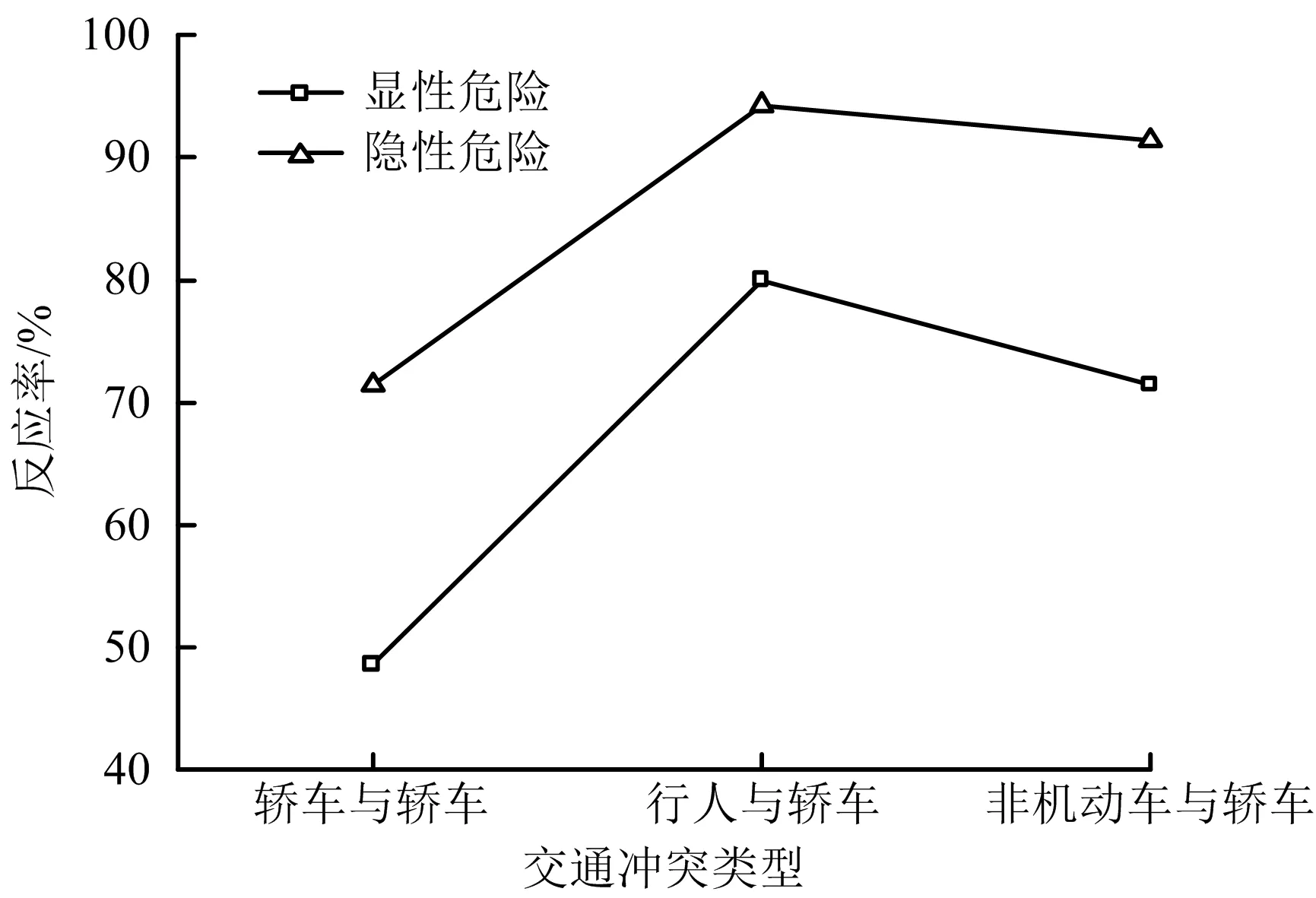
图2 不同类型场景反应率Fig.2 Response rates of different types of scenes
为探究轿车交通冲突显性危险场景中,导致驾驶人有效制动反应率较低原因,提取该场景驾驶人做出有效制动时瞬时速度及未采取有效制动时车辆瞬时速度,如图3所示。由图3可知,未采取有效制动驾驶人平均瞬时车速为46.3 km/h,采取有效制动驾驶人平均瞬时车速为59.2 km/h,结合表2,驾驶员在显性危险场景中平均车速低于隐性危险场景,据此推测,驾驶人在显性危险场景中注重车速控制,能够有效降低车速。

图3 车辆瞬时速度Fig.3 Scatter plot of instantaneous vehicle speeds
对显性及隐性危险场景中,驾驶人采取有效制动驾驶行为数据分析,驾驶行为指标描述性统计见表2。方差分析结果显示:驾驶员在显性危险场景的纵向加速度显著低于隐性危险场景(p<0.01)。

表2 驾驶行为指标的描述性统计Table 2 Descriptive statistics of driving behavior indexes
平均刹车深度如图4所示。由图4可知,行人交通冲突场景中,驾驶人隐性危险场景平均刹车深度小于显性危险场景。为分析行人交通冲突场景驾驶行为,每30 m提取行人交通冲突场景平均车速,如图5所示。由图5可知,显性危险场景平均车速(43.3 km/h)大于隐性危险场景(42.2 km/h),且显性危险场景制动反应位置(91.2 m)大于隐性危险场景(73.3 m)。因此,在显性危险场景下,驾驶人为避免与行人碰撞,将采取较大持续制动;在隐性危险场景中,由于驾驶人提前制动,且无法预先明确危险源具体位置,持续制动时间较短,平均刹车深度较小。

图4 平均刹车深度Fig.4 Average braking depths

图5 行人交通冲突场景车速Fig.5 Vehicle speeds in pedestrian traffic conflict scenes
危险发生时,驾驶员无转向操作任务或弯道行驶,结合实验观察及原始数据分析,被试遇到危险时,大部分采用制动措施规避危险,导致车辆方向盘旋转率整体较低且差异不明显。
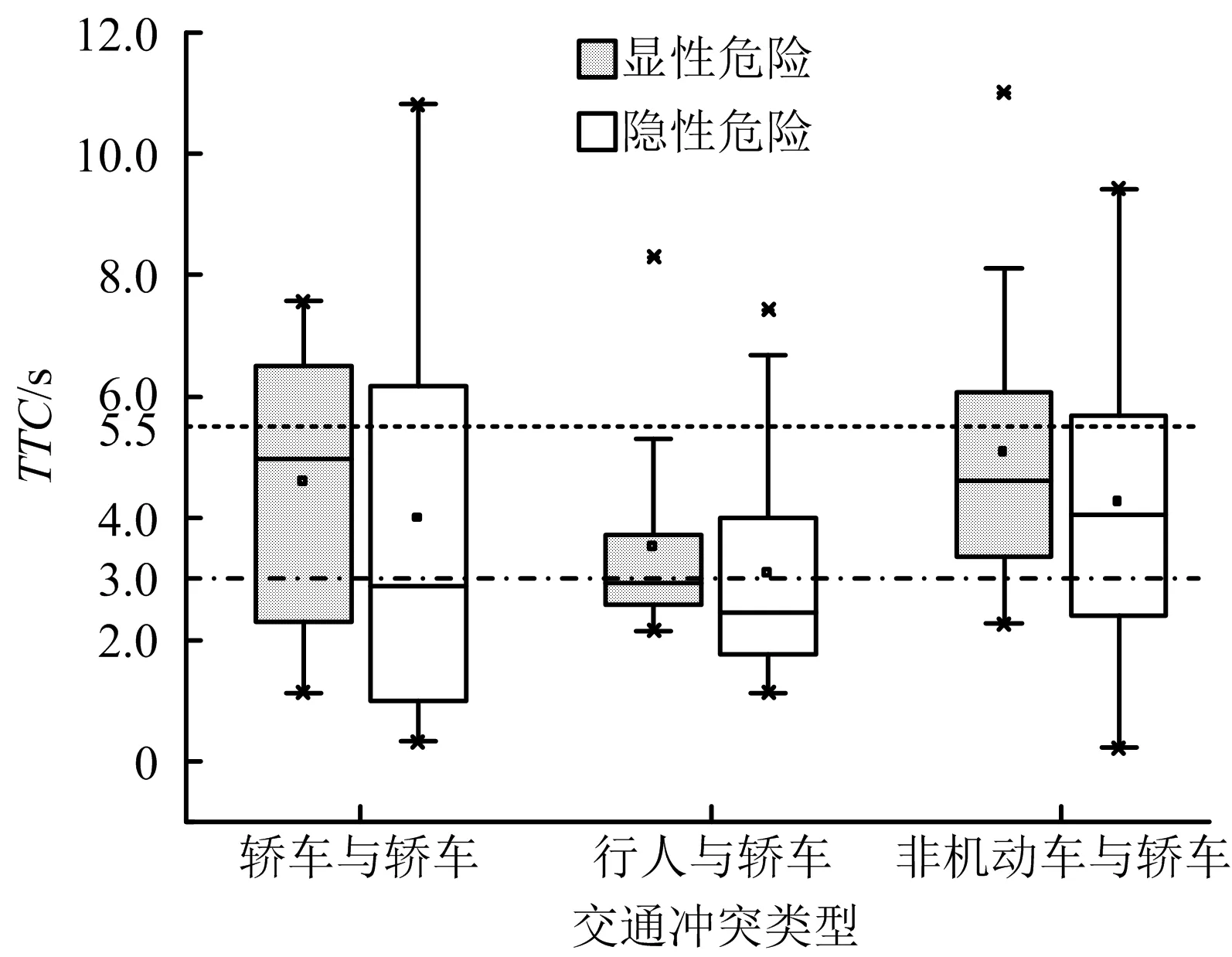
图6 危险场景TTC箱图Fig.6 TTC box diagram of hazard scenes
以3 s和5.5 s作为分界线将TTC分为3类,代表不同危险感知能力等级[22]。其中,TTC<3 s时表示碰撞风险高,危险感知能力等级为“低级”;3 s≤TTC<5.5 s时表示中等碰撞风险,危险感知能力为“中级”;TTC≥5.5 s时表示碰撞风险低,危险感知能力为“高级”。由图6可知,显性危险场景TTC均值高于隐性危险场景。3类交通冲突场景中,行人交通冲突类型TTC值及分布范围相对较小,TTC均值见表3。由表3可知,男性驾驶人在显性危险场景及隐性危险场景中TTC均值大于女性,新手驾驶人在显性危险场景及隐性危险场景中TTC均值大于经验驾驶人TTC均值。
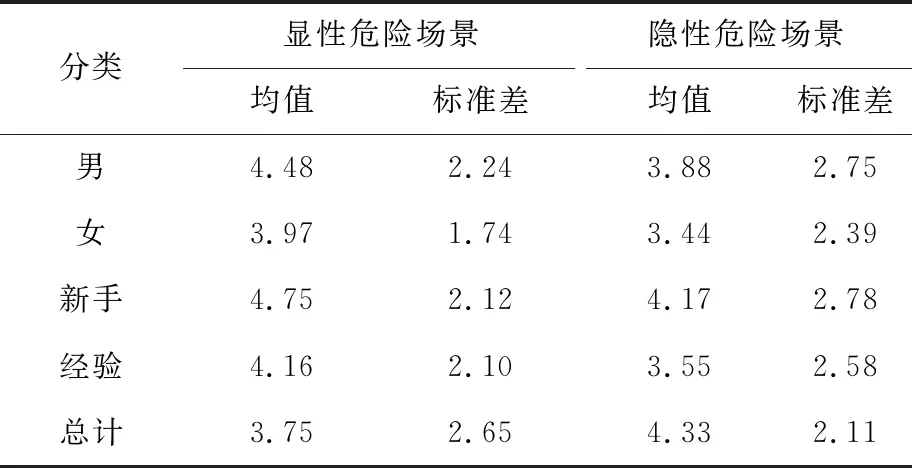
表3 TTC均值Table 3 Mean values of TTC
将行车状态、操纵及反应时相关指标与交通冲突指标TTC进行相关性分析,得TTC与平均车速呈显著负相关(r=-0.454,p<0.01),与制动反应位置呈显著负相关(r=-0.964,p<0.01),与制动车速呈显著负相关(r=-0.168,p<0.05),与归一化制动反应时间呈显著负相关(r=-0.437,p<0.01)。行车状态、操纵相关指标以及反应时相关指标共线性分析表明,各指标间相关系数均小于0.7,所有指标容差均大于0.2,且VIF<10,因此,各指标间不存在共线性。
4 基于Bayes判别法的驾驶人危险感知判别模型
4.1 Bayes判别法
Bayes判别法首先假设有k个总体G1,G2,…,Gk,计算样品属于各总体的条件概率P(G=i|X=x)(其中i=1,2,…,k),假设fi(x)和Πi为G=i的条件概率密度和先验概率,fj(x)和Πj为G=j的条件概率密度和先验概率,比较k个概率大小,将待判样本归为条件概率最大总体。Bayes判别函数如式(1)所示:
(1)
假设X服从D维正态分布,μi和Σi为i类分布均值及协方差矩阵,如式(2)所示:
(2)
当P(G=i|X=x)=maxP(G=j|X=x),1≤j≤k时,认为x属于相应类i中任意一个。
4.2 构建驾驶人危险感知判别模型
将各驾驶人驾驶行为指标作为判别模型输入,基于Bayes判别法建立驾驶人危险感知能力判别模型。由于驾驶人危险感知能力分为3个等级,故得到3个判别函数。判别函数系数见表4。其中,F1,F2,F3分别表示低、中、高3个危险感知能力水平;x1,x2,…,x9分别表示性别、驾龄、平均车速、平均纵向加速度、制动反应位置、平均刹车深度、方向盘旋转率、当前车速、归一化制动反应时间。

表4 判别函数系数Table 4 Discriminant function coefficients
4.3 危险感知判别模型验证
采用回顾法,将样本数据分别回代判别函数,比较3个函数值大小,将判别函数值最大的函数对应类型作为预测类型,以评价判别函数判别能力。判别模型分类结果见表5。

表5 判别模型分类结果Table 5 Classification results of discriminant model
对个案进行交叉验证,分类结果见表6。根据表6计算,预测分类正确个案占原始个案总数77.5%,说明模型预测性能较好。

表6 交叉验证分类结果Table 6 Classification results of cross-verify
5 结论
1)驾驶人对隐性危险场景反应率高于显性危险场景。在被试车辆分别与轿车、行人、非机动车发生交通冲突危险驾驶场景中,与行人发生交通冲突反应率最高。
2)驾驶人在隐性危险场景中平均车速较高,且制动反应位置距离危险源较远。
3)以交通冲突指标TTC衡量驾驶人危险感知能力,驾驶人在隐性危险场景中TTC值低于显性危险场景,且3种类型交通冲突场景中,驾驶人对行人的危险感知最弱。
4)基于Bayes建立驾驶人危险感知能力判别模型,模型交叉验证正确为77.5%,能较好判别驾驶人危险感知能力。
猜你喜欢
意林(2021年5期)2021-04-18
扬子江(2019年1期)2019-03-08
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
消费导刊(2017年24期)2018-01-31
作文周刊·小学一年级版(2017年27期)2017-08-10
辽宁大学学报(哲学社会科学版)(2017年3期)2017-06-21
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01
中学语文(2015年27期)2015-03-01
