五相永磁同步电机开路故障诊断
2021-04-12 09:22李添幸马瑞卿赵犇杨伟舟彭家勇
西安交通大学学报 2021年4期
李添幸,马瑞卿,赵犇,杨伟舟,彭家勇
(西北工业大学自动化学院,710129,西安)
从全电飞机(或多电飞机)的概念被提出,到目前已经融入到飞机设计的核心理念中,以电机和驱动控制器为核心的电驱动系统在飞机上得到了广泛的应用,比如电刹车、扰流板以及以燃油泵为代表的各类泵负载。大型飞机电驱动系统功率等级需求的增加,以及机载设备功率等级的大幅度提升,对机载电机提出了高功率密度、高可靠性、高安全性等要求[1-5]。多相电机由多相绕组构成,具有可靠性高、功率密度高、容错能力强等优点[6-8],正好迎合这一发展的需求。
目前,针对多相永磁同步电机驱动及控制技术的研究,基本上都是基于三相电机的控制策略,并结合多相电机特点展开的[9]。还有一些学者针对不同故障模型,提出了相应的容错控制策略,以提高电机在故障状态下的性能[10-14]。根据对电驱动系统故障树的分析可知,最严重的故障为电机定子绕组匝间短路故障和开路故障。开路故障通常有定子绕组开路故障、逆变器任何一相2个功率器件的开路故障以及电机连接器的机械故障引起的开路故障[15]。开路故障会导致各相电流不平衡,产生较大的转矩脉动,增大电磁干扰,长期工作可能还会带来其他隐患,并有可能使故障扩大化。因此,当发生开路故障时,为了保证所有机载设备的安全性,以及电驱动系统的输出特性满足机载系统的控制需求,电驱动系统需要快速和准确地进行开路故障判断与定位,为容错控制提供相应的执行依据。
根据故障诊断方式,开路故障诊断方法可分为基于电机模型和基于采样数据两种[16]。现有的开路故障诊断方法主要是围绕三相电机及其驱动器系统进行分析和讨论的[17-25]。Jung等提出了一种基于模型参考自适应的故障诊断方法,通过比较模型输出电流与实际电机电流值之间的误差进行故障诊断[17]。由于在诊断过程中使用到了电机模型,所以电机参数的波动会影响诊断效果,造成误判。
基于采样数据的故障诊断方法通过分析采样数据,提取信号特征,结合在正常状态下先验知识进行故障诊断。相比之下,受到电机参数扰动的影响小。Hang等根据开路故障下零序电压幅值和电流相位的变化进行故障诊断[18],为了获得零序电压,采用3个电阻星型连接重构中心点。Cai等采用快速傅里叶变换对两路线电压进行频谱分析,根据故障状态下频谱的变化实现故障诊断[19]。Hang等基于电压信号进行故障诊断,需要增加额外的电压传感器和相应调理电路,增加电路复杂度,使可靠性降低[18-19]。Khojet等对单周期内每一相定子电流平均值进行分析,实现了多绝缘栅双极型晶体管(IGBT)和电流传感器故障诊断[20-22]。Potamianos等对相电流进行哈尔小波变换,采用模糊推理系统对变换结果进行分析以实现开路故障的检测[23]。Huang等以每相电流给定值与实际采样值之间的误差作为回声状态网络输入,通过不断训练回声状态网络模型,以实现故障诊断[24]。Khojet等采用的故障诊断方法都是在自然坐标系下实现的,通过分析每相电流在故障下的特征进行故障辨识[20-24]。在多相电机的故障诊断中,随着定子绕组相数的增加,诊断策略的计算量也随之大幅度增加,因此影响其诊断效率。
基于静止坐标系(或旋转坐标系)中的电流轨迹特征进行故障诊断,可以大大简化诊断过程,提高诊断效率。Diallo等将这一理念用于感应电机开路故障诊断中,通过分析感应电流在α-β子空间中电流轨迹特征,实现逆变器中功率器件开路故障诊断[25]。Trabelsi等将归一化后的三次谐波电流组成二维向量,根据二维向量在x-y子空间中的分布特点进行开路故障诊断[26]。该方法要求三次谐波与基波电流之比必须大于20%,才能有效地进行故障诊断。为了解决这一问题,Trabelsi等采用基波电流参考值与采样值之间误差构成二维故障向量,根据归一化后的二维故障向量在αf-βf子空间位置幅值与方向进行故障诊断[27]。在构成向量以及归一化的过程中涉及到复杂的运算,极大地增加了处理器负担。此外,其故障判定是根据所构成矢量幅值在电机旋转360°电角度时间内积分值进行的。Trabelsi等进一步将这种理念用于五相永磁同步电机,实现了单相桥臂功率器件开路故障和单相断路故障的故障诊断[27-28]。在实际工程应用中,随着电机转速的升高,在一个360°电角度内的采样点个数会不断减少,并且故障定位是根据所构建的向量归一化后的方向决定,当用于两相开路故障的故障诊断时,会产生错误的故障定位。
本文提出一种基于电流采样数据的故障诊断方法。根据电流轨迹分布特征,实现五相永磁同步电机(FP-PMSM)驱动系统中单相、双相开路故障诊断。通过坐标变换减少诊断过程中历史数据的存储,提高诊断效率。首先,通过分析FP-PMSM电驱动系统的控制框图和数学模型,得到静止坐标系下电流与电压的传递函数。其次,根据正常状态下的端电压输出方程和传递函数,得到正常状态基波电流在α-β子空间的轨迹特征。再次,根据故障状态下的端电压输出方程和传递函数,得到不同故障状态下基波电流和三次谐波电流的轨迹特征。最后,通过分析基波电流和三次谐波电流的轨迹特征,提出相应的故障诊断策略,并通过实验进行验证。
1 数学模型
FP-PMSM定子与转子间的气隙分布,以及定子绕组的绕线分布,导致在切割磁场的过程中,定子电流产生基波磁动势的同时产生三次谐波磁动势。因此,用于FP-PMSM的Clark坐标变换的静止坐标系可以分为α-β与x-y两个子空间,分别对应基波数学模型和三次谐波数学模型。
(1)
(2)
式中:ωe为电机的电角速度;ψf1为基波磁链幅值;ψf3为三次谐波磁链幅值;Lm为电感幅值;R为等效定子相电阻。
五相永磁同步电机参数如表1所示,绕组形式采用单层分数槽集中绕组。

表1 FP-PMSM参数
FP-PMSM驱动逆变器由5个桥臂组成。逆变器可以产生32个基础电压矢量,电压矢量在α-β子空间幅值大小根据逆变器的导通形式可以分为4类:①单个上桥臂或下桥臂导通,为中矢量,其幅值为0.4udc;②两个相邻的上桥臂或下桥臂导通,为大矢量,其幅值为0.647 2udc;③两个非相邻的上桥臂或下桥臂导通,为小矢量,其幅值为0.247 2udc;④上桥臂(或下桥臂)全部导通,为零矢量,其中udc为母线电压。α-β子空间中任何一个空间电压矢量在x-y子空间中有且只有唯一的伴生电压矢量,该伴生电压矢量的相角为α-β子空间中电压矢量的3倍。中矢量在x-y子空间中伴生电压矢量幅值不变;大矢量与小矢量在x-y子空间中伴生电压矢量幅值分别为0.247 2udc、0.647 2udc。
目前常用于FP-PMSM的空间矢量脉宽调制(SVPWM)主要分为2种:①参考空间电压矢量由矢量所在扇区相邻的2个大矢量合成;②参考空间电压矢量由矢量所在扇区相邻的2个大矢量和2个中矢量合成[28]。由于三次磁动势的存在,必须要考虑合成后的电压矢量在x-y子空间的映射。根据32个基础电压矢量在不同子空间中的幅值与相位可知,在α-β坐标系下相位相同的中矢量与大矢量,其在x-y坐标系下的伴随电压矢量相位相差180°,幅值比为1∶1.618。采用第二种方式合成参考电压矢量,可以保证逆变器输出端电压中三次谐波含量为零,其中相位相同的中矢量与大矢量作用时间比等于1∶1.618。FP-PMSM矢量控制框图如图1所示。
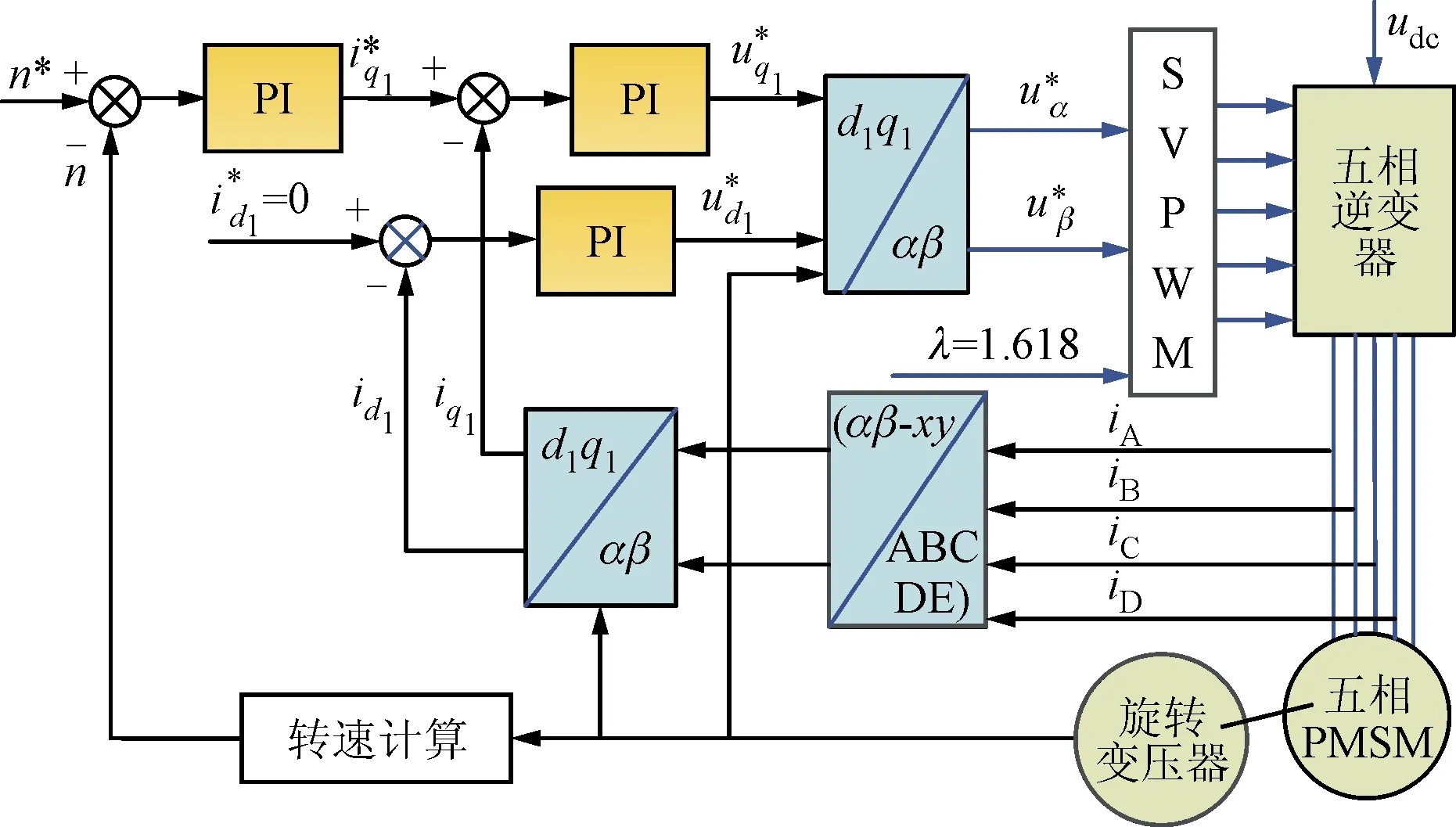
图1 FP-PMSM矢量控制原理图
2 正常状态电流轨迹特性

(3)
式中:un为电机中性点对地电压,
un=(uA+uB+uC+uD+uE)/5
由图1和式(1)可以得到,闭环状态下基波电压与基波参考电流之间传递函数在频域下的表达式为
(4)
式中:kp和ki均为电流环PI参数,kp=γLm,ki=γR;γ为电流环带宽。ufv(s)=uv(s)-ev(s),v∈{α,β}。
对式(3)进行Clark坐标变换,将变换后的基波分量和式(2)中基波反向电动势代入式(4),得到正常状态下系统闭环控制基波电流表达式
(5)

根据式(5)可知,基波电流在α-β空间的轨迹为圆形,其圆心为坐标轴原点,半径等于kc1。
3 故障状态电流轨迹特性
目前针对FP-PMSM开路故障主要可以实现的是单相开路和双相开路故障转态下的容错控制,其中双相开路故障分为:①相邻两相开路;②相隔两相开路。以上所述的三类开路故障具体到故障发生位置,可分为15种故障状态,如表2所示。在开路故障发生前后,SVPWM以及电机的本体结构没有发生改变,改变的只有故障相端口对地输入电压,而其他正常相的端口对地输入电压与故障发生前是一致的。故障相绕组与逆变器的连接回路中发生断路,变成悬空的状态,导致端口对地电压不再受SVPWM控制,而且无法对其测量。为此,根据FP-PMSM的数学模型对故障相的相电压进行估计。通常电机相电压由4部分组成:①相电阻上的压降;②故障相自感电动势;③故障相与其他相的互感电动势;④反向电动势。由于故障相相电流为零,因此前两部分压降为零。此外,为了提高FP-PMSM的容错能力,FP-PMSM定子绕组采用单层分数槽集中绕组方式设计,以消除各相绕组之间的互感。因此,故障相的相电压等于电机的反向电动势,如式(6)所示,从A相到E相,相位ι依次取0、1、2、3、4。
uxn=exn=-ωe[ψf1sin(θ-72°ι)+
3ψf3sin3(θ-72°ι)]
(6)
以A相开路为例,根据式(3)和式(6),可得到A相开路故障状态下端口对中性点电压为
(7)
对式(7)进行Clark坐标变换,得到故障状态下的五相相电压在静止坐标系上的映射
(8)
3.1 基波电流α-β子空间轨迹分析
将式(8)中的uα、uβ以及式(2)中的eα、eβ代入式(5),得到A相开路故障下,FP-PMSM基波电流在α-β子空间的表达式为
(9)

忽略式(9)中的三次谐波分量和初始状态响应,可以得到A相发生开路故障时,基波电流在α-β的轨迹为椭圆形,轨迹方程如下
(10)
同理,可以得到其他故障模式下iα、iβ表达式,如表2所示。由表2可知,在故障状态下基波电流在α-β空间的轨迹不再是圆形。

表2 15种故障状态下α-β空间基波电流表达式
在实验中,控制FP-PMSM转速为1 000 r/min,负载转矩为0.9 N·m,分别模拟了三类开路故障,即A相开路、A、B两相开路以及A、C两相开路。对五相电流采样值进行Clark变换,得到正常状态与3种故障状态的基波电流在α-β子空间轨迹,如图2所示。

(1)正常
实验波形与表2中相对应的故障状态下iα、iβ表达式相互印证。通过分析基波电流在α-β子空间轨迹可以得到以下结论:①在正常状态下,电流轨迹为圆形,考虑到三次以上谐波的影响,圆形电流轨迹会产生一些畸变,如图2a所示;②在开路故障状态下,电流轨迹均不再是圆形轨迹,电流轨迹畸变率远远大于正常状态,如图2b~d所示;③在任何状态下,电流轨迹均为原点对称。电流轨迹距原点距离随电机旋转周期性变化,是电流频率的2倍。
3.2 三次谐波电流d1-q1子空间轨迹分析

(11)

对式(11)进行Park坐标变换,得到三次谐波电流在基波旋转坐标上的表达式
(12)
为了保证系统的稳定性,通常电流环带宽要远大于转速环带宽。受电气时间常数的限制,电流环带宽γ通常设定为R/Lm,因此,在转速环带宽范围内,延迟角η的正弦值约等于0,余弦值约等于1。除此之外,为了方便分析,忽略式(12)中的四次谐波有
(13)
根据式(11),延迟角χ的正切值是延迟角η正切值的3倍。由式(13)中的term1和term2可以得到两个圆形轨迹,分别如图3中红线和紫线所示。通过矢量合成term1和term2的轨迹可以得到三次谐波电流轨迹,如图3中蓝线所示。两种延迟角之间误差的存在,导致三次谐波电流轨迹为顺时针旋转的椭圆。其旋转角度由kc3、kc4、χ与η共同决定。根据三角形的几何原理,当kc3=4kc4时,旋转角度满足下列等式
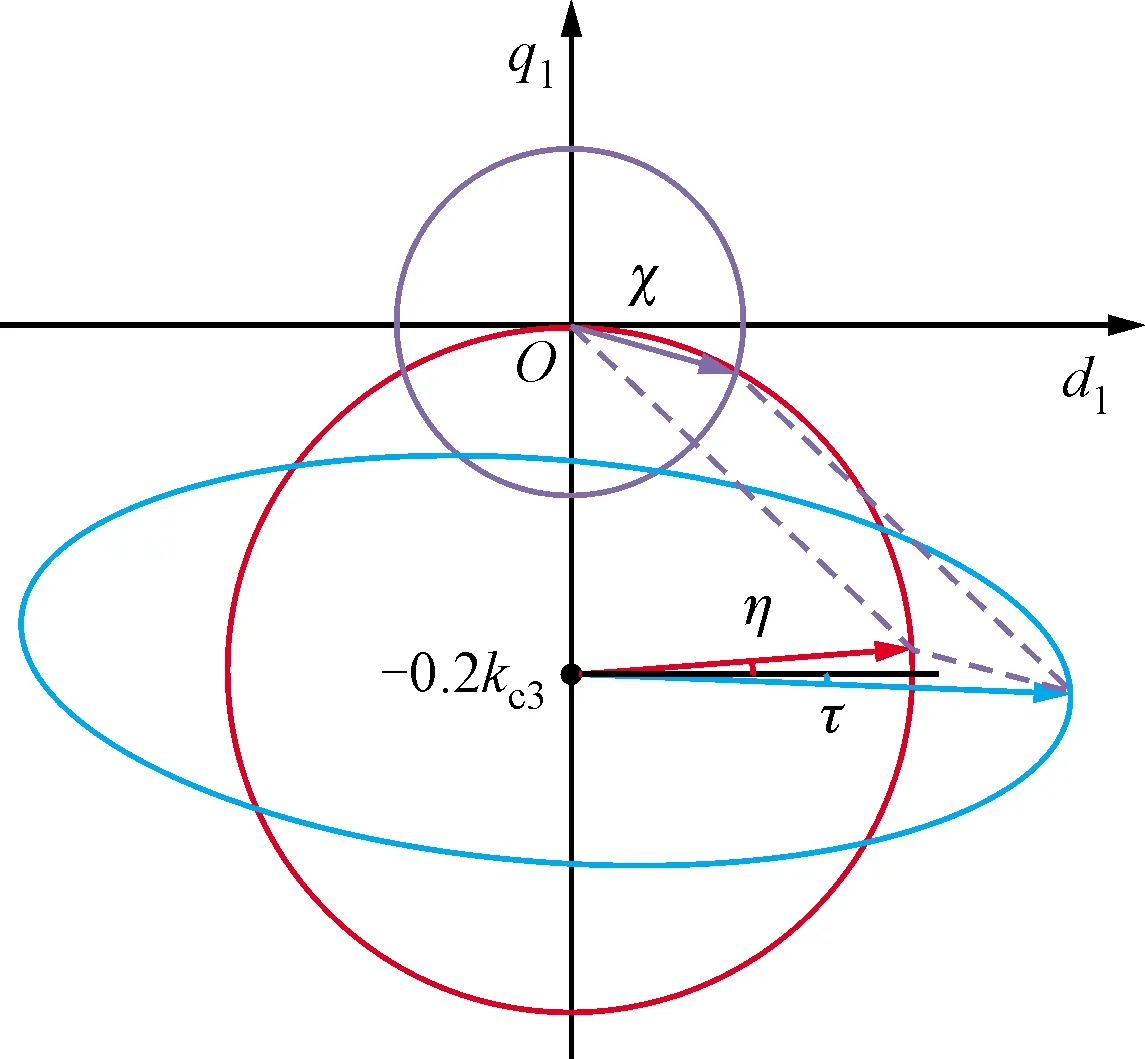
图3 三次谐波电流在d1-q1空间电流轨迹(A相开路故障)
(14)
通过对式(14)求ωe的偏导,当ωe=0.557γ时,旋转角最大,为15°。但是,实际情况下kc3>4kc4,所以旋转角度小于15°。同理可得id1-xy、iq1-xy在其他开路故障状态下的表达式,如表3所示。

表3 15种故障状态下三次谐波电流在d1-q1空间的表达式
设定电机的负载转矩为0.9 N·m,分别工作于3种转速,其实验波形如图4所示。根据实验波形可知,虽然电流轨迹随着电机转速发生了旋转,然而,轨迹的分布特征没有改变。

图4 3种转速下基波旋转坐标系下三次谐波电流轨迹(A相开路故障)
设定电机的转速为1 500 r/min,分别工作于3种负载转矩,其波形如图5所示。根据实验波形可知,当转速不变时,kc3随着负载转矩增加而增加,而kc4不会随着负载转矩变化而变化。因此,椭圆的长半轴与短半轴均随着转矩增大而增大。然而,轨迹的分布特征没有改变。根据实验波形图4和图5可知,三次谐波电流在d1-q1空间的轨迹分布特征不随转速和转矩的变化而变化。

图5 3种负载转矩下基波旋转坐标系下三次谐波电流轨迹(A相开路故障)
类比A相开路故障对应的电流轨迹特征可以得到15种开路故障下三次谐波电流在基波旋转坐标系上的分布特征,如表4所示。

表4 不同故障下,三次谐波电流d1-q1空间轨迹特征
4 故障诊断
4.1 故障诊断步骤
在正常状态下,基波电流在α-β子空间的轨迹到原点的距离相同。当发生开路故障时,基波电流在α-β子空间的轨迹到坐标轴原点的距离随着转子位置变动而变化,周期为基波频率的2倍频。根据表3可知,在故障状态下的id1-xy与iq1-xy的频率同样也为基波频率的2倍频,因此将电机转过5个扇区的时间设定为一个诊断周期,5个扇区内的电流采样值作为故障诊断数据。根据表2可知,当发生任何一种开路故障时,基波电流在α-β子空间的轨迹不再为圆形,因此可以将轨迹到原点距离的变化作为是否发生开路故障的诊断依据。在此基础上,根据三次谐波电流在d1-q1子空间的轨迹分布特征进行故障定位。
将实时采样的五相电流经过Clark坐标变换,分别得到α-β子空间的iα与iβ,x-y空间下ix与iy。根据式(15)得到基波电流轨迹到原点距离
(15)
式中:i∈{1,2,…,n};t1~tn为一个诊断周期内的采样点。
将电机转过每个扇区时间内所有的采样点所对应的基波电流轨迹到原点距离代入式(16),得到每个扇区对应的平均值。
(16)
式中:i∈{m1,m1+1,…,m2};tm1~tm2为一个扇区内的采样点。
在一个诊断周期内电机转过5个扇区,根据式(16),可以得到5个平均值、最大值Diαβ,max、最小值Diαβ,min,以及平均值Diαβ,avg。将Diαβ,max、Diαβ,min、Diαβ,avg代入式(17),得到基波电流轨迹畸变率dratio,当dratio>γ时,则认为发生开路故障。
dratio=(Diαβ,max-Diαβ,min)/Diαβ,avg
(17)
将ix与iy代入式(18),映射到d1-q1子空间。
(18)
以id1-αβ3为横坐标,iq1-αβ3为纵坐标,根据表5,得到该时刻三次谐波电流在d1-q1子空间所在区域。通过对一个诊断周期内所有采样时刻所对应的区域进行汇总,得到三次谐波电流在d1-q1子空间的轨迹分布。对一个诊断周期内所有id1-αβ3与iq1-αβ3进行累加求平均值,如式(19)所示
(19)

图6 故障诊断流程图

表5 三次谐波电流在d1-q1空间区域分布的判定依据
4.2 实验平台和故障诊断波形
实验测试平台如图7所示。主控单元采用数字信号处理器DSP实现SVPWM算法和故障诊断算法,逆变器的开关频率为10 kHz。在实验中采用空气开关模拟开路故障。波形中ms/div代表一横格跨度的时间,其中电流波形一竖格跨度的电流为2 A。

图7 实验平台
为了使故障诊断过程更加直观,采用DA转化器实时输出故障诊断结果。由于实验平台选用DA转换器的最大输出为3.3 V,因此以0.2 V的级差来区分15种故障。不同故障状态对应故障诊断结果的故障信号具体设定如表6所示。

表6 故障信号输出电压
实验电机负载转矩为额定负载转矩,电机转速分别设定为500、1 500 r/min,分别进行单相开路、相隔和相邻两相开路实验。实验波形分别为A相开路故障(图8),A、C相开路故障(图9)以及A、B相开路故障(图10)。图8为正常运行过程中A相发生开路故障的实验波形,开路故障发生后,A相电流值等于零,B相电流大于正常转态,在一个诊断周期后,紫色线从0变成0.2 V,代表诊断出A相开路故障。在图8b中,一个诊断周期中电机转过5个扇区,每个扇区对应的基波电流轨迹到原点距离的平均值依次为2.029、2.484、3.068、2.986、2.72。将其中的最大值、最小值以及平均值代入式(17),得到电流畸变率为0.391,大于阈值γ,判定为发生开路故障。通过汇总每一采样时刻三次谐波电流在d1-q1子空间中分布区域,得到三次谐波电流在d1-q1子空间分布于Ⅲ、Ⅳ象限。电流轨迹中心点为(0.004,-1.118),位于d1-q1子空间的负半轴。根据表4,故障定位为A相开路故障。

(a)500 r/min,0.9 N·m

(a)500 r/min,0.9 N·m
根据图9可知,当A、C两相同时发生开路故障,A、C两相电流同时等于零,在一个诊断周期后,紫色线从0变成1.2 V,代表诊断出A、C两相发生开路故障。图10为正常运行过程中A、B两相同时发生开路故障实验波形,当发生开路故障后,A、B两相电流同时为0,一个诊断周期后,紫色线从0变成2.2 V,代表诊断出A、B两相发生开路故障。

(a)500 r/min,0.9 N·m
图11为FP-PMSM在转速、转矩变动时发生开路故障的实验波形,图中棕红色线代表电机转速。图11a为电机工作于转速上升过程中,起始转速为300 r/min,伴随着转速上升,负载转矩从0.2 N·m升到0.9 N·m,实验波形中两相电流的幅值与频率均有明显增加趋势;当转速上升到750 r/min左右时,A相发生开路故障,并在一个故障诊断周期后,故障代码从0变成0.2 V。图11b为电机工作于转速下降过程,起始转速为1 500 r/min,随着转速下降,负载转矩从0.9 N·m下降至0.2 N·m,实验波形中两相电流的幅值与频率明显减小;当转速降到1 000 r/min左右时A相发生开路故障,并在一个故障诊断周期后,故障代码从0变成0.2 V。

(a)电机升速,负载转矩增加过程
两种动态情况下基波电流到原点距离如图12所示。可以发现,随着转速上升,转矩增加,基波电流到原点距离也在不断增加,而其在一个诊断周期内抖动的幅值差基本不变。根据采样数据得到电机在两种动态情况下,6个诊断周期对应的基波电流畸变率与三次谐波电流轨迹中心点,如表7所示。并且,这时每个诊断周期内三次谐波电流轨迹在d1-q1子空间分布于Ⅲ、Ⅳ象限。结合表4,可以判断为发生了A相开路故障。

(a)电机升速,负载转矩增加过程

表7 基波电流畸变率与三次电流轨迹中心点
为了验证故障诊断策略在故障状态下的有效性,设定电机工作于A相开路故障状态,突然断开空气开关模拟B相开路故障。根据图13可知,故障发生后,B相电流等于0,C相电流增长至原来的两倍。B相开路故障发生后,在一个诊断周期内,故障代码从0.2 V变为2.2 V。设定电机工作于A相开路故障状态,突然断开空气开关模拟C相开路故障。根据图14可知,当发生C相开路时,C相电流等于0,B相电流大于故障发生前,一个诊断周期内,故障代码由0.2 V变为1.2 V。

(a)500 r/min,0.9 N·m

(a)500 r/min,0.9 N·m
根据实验波形图8~图11,电机无论是工作于恒定转速(或恒定负载)的稳态,还是工作于不恒定转速(或负载)的动态,本文拟定故障诊断方法均可实现故障的诊断与定位。图13与图14为FP-PMSM运行于故障状态下的实验波形,可以看出,在故障状态下发生其他相故障时,本文提出的故障诊断方法亦可实现故障重新定位,对不同故障状态具有很强的辨识度。本文提出的故障诊断方法的检测周期由电机转速及极对数决定,当电机转速为500 r/min时,故障检测周期为15 ms;当电机转速为1 500 r/min时,故障检测周期为5 ms。如果5个扇区内的电流采样值以流水线的方式进行处理,可以更快地实现故障判定和定位。
5 总 结
针对FP-PMSM电驱动系统中的单相、双相开路故障,提出了一种新的故障诊断方法,以实现快速、准确的开路故障诊断。故障诊断方法以电机转过5个扇区时间内的五相电流采样值作为诊断数据,减少了诊断数据的存储量,在对诊断数据的处理过程中未涉及复杂运算,提高了诊断效率。首先,根据基波电流在α-β子空间轨迹到原点距离在一个诊断周期的变化率来判定是否发生开路故障;其次,通过坐标变化,将三次谐波电流映射在d1-q1子空间。根据开路故障状态下三次谐波电流在d1-q1子空间的轨迹特征进行故障定位。最后,通过实验验证了该方法在稳态和动态情况下的有效性。
猜你喜欢
消费电子(2022年6期)2022-08-25
导航定位学报(2022年4期)2022-08-15
光子学报(2022年3期)2022-04-01
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
建材发展导向(2021年7期)2021-07-16
科学与财富(2016年33期)2017-05-23
科学生活(2016年10期)2016-11-02
科技视界(2016年8期)2016-04-05
新高考·高一物理(2016年1期)2016-03-05