杂波条件下利用一维卷积神经网络的认知雷达波形设计
2021-04-12 08:50赵俊龙李伟甘奕夫邹鲲
西安交通大学学报 2021年4期
赵俊龙,李伟,甘奕夫,邹鲲
(西安空军工程大学信息与导航学院,710077,西安)
2006年,加拿大学者Haykin根据海豚、蝙蝠等生物的回波定位系统首次提出认知雷达的概念[1]。与传统雷达相比,认知雷达具有智能信号处理、发射机与接收机之间形成闭环反馈、保存雷达回波信息等特点[2-3]。作为未来雷达的主要发展趋势,认知雷达通过与环境的交互,改变雷达发射波形,使雷达更适应环境。因此,波形设计是认知雷达中最重要组成部分之一[4-5]。
波形设计的本质是准则函数加约束条件的最优求解问题[6]。其中,准则函数的选择取决于雷达任务。针对目标参数估计或目标识别任务,Bell提出用最大化目标与雷达回波之间的互信息量(MI)来设计波形[7],更多的互信息量意味着可以通过回波获取更多关于目标的信息,减小目标的不确定性,更清晰的刻画目标特征,该方法被称为MI方法。Guo等证明了在目标参数估计问题上,MI方法与最小均方差(MMSE)方法是等价的[8]。对于高斯噪声下特定目标的检测问题,Guerci与Pillai提出信干噪比(SINR)准则来最大化雷达接收信号的信干噪比设计最优检测波形,并取得了良好的结果[9],该方法称为SINR方法。上述文献仅考虑了噪声对波形设计的影响,而忽略了杂波的影响。为解决杂波条件下目标识别和目标检测问题,Romero等针对确定目标和扩展目标在噪声和杂波背景下,通过MI方法和SINR方法分别设计波形,并推导出MI方法与SINR方法之间的关系,为波形设计领域提供了比较完整的理论[10]。随着雷达技术的发展,雷达任务和工作模式日趋多样化,不仅需要进行目标检测,同时还需要对目标参数进行估计和目标识别,基于单个准则设计的雷达波形已经难以满足需求,这就需要更加灵活的波形设计框架来联合不同的设计准则进行雷达波形设计[11]。然而,由于不同准则之间的数学关系难以建立,或者建立的数学关系缺乏针对性,因此学术界对这一领域的研究还较少。
深度学习对函数的拟合能力为联合不同准则问题提供一种解决思路。当下,随着硬件计算能力的提升,深度学习成为研究热点,其可有效提取数据特征,学习数据之间的内在规律,并在图像处理、机器翻译、自动驾驶等领域[12-13]取得了前所未有的成就。近年来,基于不同应用场景,学者们提出了一系列深度学习模型,其中,卷积神经网络(CNN)是应用最为广泛的模型之一,常用于二维数据处理。随着技术需要,适用于处理一维数据的一维卷积神经网络(1D-CNN)逐渐应用在语音识别[14]、自然语言处理领域[15],也广泛应用在雷达领域[16]。为解决联合不同准则问题,本文提出一种杂波条件下利用1D-CNN的认知雷达波形设计方法(CRWD-1D-CNN)。
本文首先分析了MI方法和SINR方法设计波形的过程,得到了目标函数的表达式,并设定环境信息,使用两准则设计信号,构建训练集;其次,介绍了1D-CNN网络结构,提出使用1D-CNN来联合MI方法和SINR方法的流程图。在此基础上,根据训练集数据形式设计了1D-CNN模型;最后,对1D-CNN模型进行训练和测试,并通过实验仿真,对比1D-CNN生成信号、MI方法信号和SINR方法信号对应的检测概率、目标识别率以及雷达综合性能指标,证明了本方法可联合MI方法和SINR方法,提高雷达综合性能。
1 信号模型与波形设计方法
1.1 信号模型
图1为扩展目标信号模型图,其中x(t)是时宽为T、带宽为W的雷达发射信号,扩展目标脉冲响应h(t)为有限时间Th内的零均值随机过程,c(t)为随机杂波脉冲响应,n(t)为雷达接收机端加性高斯白噪声,y(t)是雷达接收机接收信号,r(t)为持续时间为Tr的理想低通滤波器。x(t)的傅里叶变换为X(f),h(t)的傅里叶变换为H(f),c(t)的功率谱密度(PSD)为Sc(f),噪声h(t)的功率谱密度为Sn(f)。设T远大于Th和Tr,即低通滤波器持续时间相对较短,可忽略其影响。

图1 扩展目标信号模型
由于h(t)是在时间T内的局部平稳过程,所以不能用PSD来描述。但可以使用能量谱密度(ESD)来描述,定义ESD为
ξ(f)=E[|H(f)|2]
(1)
式中:E(·)表示取期望;H(f)的均值和方差分别为
μ(f)=E[H(f)]
(2)
σ2(f)=E[|H(f)-μ(f)|2]
(3)
其中σ2(f)为目标能量谱方差(ESV),由于扩展目标是0均值随机过程,故σ2(f)=E[|H(f)|2],即ESV与ESD等价,可用ESV描述0均值有限时间随机过程。由图1可知,雷达接收信号为
y(t)=x(t)*h(t)+x(t)*c(t)+n(t)
(4)
1.2 MI方法
目标与雷达接收信号之间的互信息量为[10]
IM=I(y(t);h(t)|x(t))=
(5)

(6)

上述过程即为MI方法设计波形的过程。
1.3 SINR方法
雷达接收机接收信号的信干噪比[10]为
(7)
积分内函数为凹函数,结合能量限制,使用拉格朗日乘子技术求解得到优化波形为
(8)

当信号经由存在干扰或噪声的环境时,最佳传输信号在频域的能量分布应避开干扰或噪声能量较强的频点,具有特定的能量谱分布。由MI方法和SINR方法设计波形的过程可知,两方法设计波形时将扩展目标、杂波和噪声建模为随机过程,并使用能量谱方差σ2(f)描述目标特性,用功率谱密度Sc(f)和Sn(f)来描述杂波和噪声特性。由式(6)和式(8)可知,忽略信号的相位信息,仅从频域出发,即得到最优信号的频域能量分布的幅度谱平方,达到信号设计的目的。
2 基于1D-CNN的雷达波形设计
2.1 1D-CNN模型
自2012年AlexNet在ImageNet大规模视觉识别竞赛(ILSVRC)中取得前所未有的精度并夺冠[17]以来,CNN已经在计算机视觉领域取得了极大成就。典型的CNN可有效提取二维数据的结构特征,通常用于处理图片等二维数据,为适应语音、文本等一维数据的处理,许多学者也提出了1D-CNN模型[18]。1D-CNN结构如图2所示,通常由输入层、卷积层、池化层、全连接层、输出层等网络层组成。
卷积层具有稀疏连接和权值共享的特征。稀疏连接可避免全连接神经网络参数过多问题,而权值共享则可减小网络的过拟合。1D-CNN卷积层中为一维卷积核,卷积层的作用是使用一维卷积核在前一层输出特征图上平滑移动进行卷积操作,提取数据特征。如图2所示,第l卷积层的第j个输出的卷积特征图为

图2 1D-CNN结构图
(9)

卷积层之后为池化层,其作用为对卷积特征图进行下采样操作,减小特征维度,提高特征鲁棒性。通常有最大池化和平均池化两种函数,最大池化仅保留局部特征中最大的数据点,而平均池化将局部特征数据取平均操作,具体池化操作的选区由任务性质而定。
经卷积层和池化层处理之后的数据可称之为原始数据的深层特征,全连接层的目的就是将这些深层特征进行展平操作,来完成回归或识别任务。
2.2 基于1D-CNN的雷达波形设计流程
由于联合不同准则进行波形设计面临目标函数难以建立的问题,神经网络的学习能力为该问题提供一种解决思路。神经网络的本质就是拟合函数,给定输入和输出数据,经过训练,神经网络即可拟合输入数据与输出数据之间的非线性关系,也即函数关系。此时神经网络内部参数具备刻画输入数据与输出数据之间非线性关系的能力,而这些参数的确定是由给定数据决定的。当输入数据给定为目标、杂波、噪声等环境信息,而输出数据一部分是由MI方法根据环境信息设计的信号,另一部分是SINR方法设计的信号,经过训练,神经网络便可同时完成对MI方法函数和SINR方法函数的拟合,从而达到联合MI方法和SINR方法的目的。
基于上述思想,本文提出一种杂波条件下使用1D-CNN的认知雷达波形设计方法,其设计信号的思想如图3所示。由图3可知,本文方法主要分为3个部分:首先,分析1D-CNN进行波形设计时的影响因素,因为利用MI方法和SINR方法进行波形设计时的影响变量为目标、杂波、噪声,故1D-CNN的影响因素同样为目标、杂波、噪声等环境信息,在此基础上设定环境信息,并分别使用MI方法和SINR方法根据这些信息来设计信号;其次,随机选取一部分MI方法信号和一部分SINR方法信号,并和与之相应的环境信息共同组成训练集,然后根据训练集数据形式设计相应的1D-CNN模型;最后,使用训练集对设计的1D-CNN模型进行训练,并测试其性能。

图3 CRWD-1D-CNN方法流程
2.3 1D-CNN的设计
本文设计了一个由输入层、卷积层1、池化层1、卷积层2、池化层2、卷积层3、池化层3、Dropout层、Flatten层、全连接层1、全连接层2及输出层组成的1D-CNN模型,各层详细参数如图4所示。本文所用数据是在σ2(f)、Sc(f)、Sn(f)上采样100点得到的,且训练样本为6 000组,设定输入层信道为1,故输入数据尺寸为(6 000,300,1)。图4中,32@(11×1)表示32个维度为(11,1)的一维卷积核。

图4 本文设计的1D-CNN模型图
为减小网络的过拟合,在将数据展平前加入Dropout层,其作用是在训练过程中将部分神经元随机失活,使得神经网络以较少的神经元完成训练,从而避免过拟合问题。Dropout层丢失率设为0.5。
在卷积层提取的特征进入全连接层之前,需要Flatten层对提取到的特征进行展平操作,使之转换为更适应于全连接层处理的数据形式。由于1D-CNN在本文执行回归任务,故在输出层前添加两层全连接层。最后输出对应MI准则和SINR方法生成波形的频域能量分布对应的采样点数据,故第2个全连接层神经元数量设为100,第一个全连接层神经元数量设为300。

(10)
本文使用Adam优化算法,其中学习率ε=0.01,迭代2 000次,每次迭代批次数设为100。
3 实验仿真
本实验是在TensorFlow,MATLAB2017,Python3.6和CUDA9.0的环境架构中进行的,计算机的处理器为i5-7300 HQ,显卡为GTX1050,内存为8 GB。
假设某雷达中心频率fc=10 GHz,带宽W=100 MHz,工作频带为[9.95,10.05]GHz。发射信号时宽为10 ms,其频带内采样点为100。本文采取计算机模拟仿真的方法进行实验数据的选取,为保证数据的充分性,设定4 000组杂波,杂波PSD通常为高斯分布[19],对于i∈[1,4 000],设Scc(f)=Bexp(-0.8α(f-fi)2),其中fi=fc+W/2-2.5×104i为杂波中频,B=7.957 7×10-16为目标脉冲响应的谱方差强度,α表示谱方差随频率变化率,取α=1×10-13。为保证目标数据的非相关性,对于每组杂波,随机产生一组目标能量谱方差,借鉴文献[7,10],本文将目标能量谱方差幅度与杂波功率谱密度幅度取为相同值,共生成4 000组目标能量谱方差。假设雷达接收机端噪声为高斯白噪声,为尽可能体现雷达工作环境中噪声远远低于目标的关系,噪声功率谱密度取为Sn(f)=kT=4.143 0×10-21J,其中T=300 K为噪声有效温度,k=1.381×10-23J/K为玻尔兹曼常数。将上述每个杂波对应的目标和噪声构成一组环境信息,共生成4 000组环境信息。
获得环境信息之后,分别使用MI方法和SINR方法根据上述4 000组环境信息设计波形,对于每种准则信号随机抽取3 000组环境信息与其对应环境信息组成包含6 000组样本的训练集,剩下1 000组环境信息作为测试集。然后,使用训练集对设计的1D-CNN模型进行训练。最后,使用测试集中的环境信息对训练完成的模型进行测试。
每组环境信息包含3个变量,即杂波功率谱密度、目标能量谱方差、噪声能量谱方差。测试集中包含1 000组环境信息,随机抽取一组如图5所示的环境信息,其中图5a为杂波的能量谱密度Sc(f),图5b是噪声的功率谱密度Sn(f),由上述内容可知,Sn(f)为固定值,图5c是目标的能量谱方差σ2(f)。
在雷达发射功率P=100 W时,使用图5中的环境信息对训练完成的1D-CNN模型进行测试,并与MI方法和SINR方法信号进行对比,结果如图6所示。由图6可知,3种信号在分配能量时都避开了杂波较强的频点。MI方法信号频带较宽,各频点分配的能量相对较低。SINR方法信号频带相对较窄,此窄带内频点能量较高。这是由于MI方法信号为获取目标更多信息,需将能量分配到目标不同散射模式的频点处,而SINR方法信号只需将能量分配到目标最大反射模式的频点处。但是反射较弱的频点可能包含较为明显的目标特征,可用于目标识别。所以,MI方法信号通常用于目标识别,SINR方法信号用于目标检测。CRWD-1D-CNN方法生成的信号频带介于两信号之间,可兼顾目标不同的散射模式,既可获得关于目标的较多信息,又可维持较高的信干噪比,实现了MI方法与SINR方法的平滑过渡。

(a)杂波功率谱密度

图6 3种方法生成信号的频域能量分布图
本文使用蒙特卡罗方法对不同能量下1D-CNN模型进行测试。给定发射机能量,使用测试集中环境信息对训练完成的1D-CNN模型进行测试,生成1 000组波形。对1 000组波形的互信息指标和SINR指标取平均,得到该能量下的互信息和信干噪比指标,其结果如图7~图9所示。
图7为雷达不同发射功率下MI方法、SINR方法和CRWD-1D-CNN方法生成信号对应的互信息量指标。由图可见,3种方法生成信号对应的互信息量都随雷达发射功率的增加而增加,且CRWD-1D-CNN生成信号对应的互信息量要比SINR方法信号平均高出20.10%,比MI方法信号平均低8.24%。

图7 不同功率下3种方法生成信号对应的互信息
根据统计判决理论,雷达检测可视为假设检验问题,解决该问题的基本方法为经典奈曼-皮尔逊(NP)定理,根据NP定理构造雷达检测器,得雷达检测概率为[20]
(11)

图8为雷达不同发射功率下,3种方法生成的信号对应的信干噪比。在虚警率PFA=10-4时,根据式(11),可由图8中数据得到如图9所示的检测概率。由图9可知,CRWD-1D-CNN方法生成的信号对应的检测概率随雷达发射功率增加而增加,且要比MI方法信号对应的信干噪比平均高出10.40%,比SINR方法信号平均低6.43%。
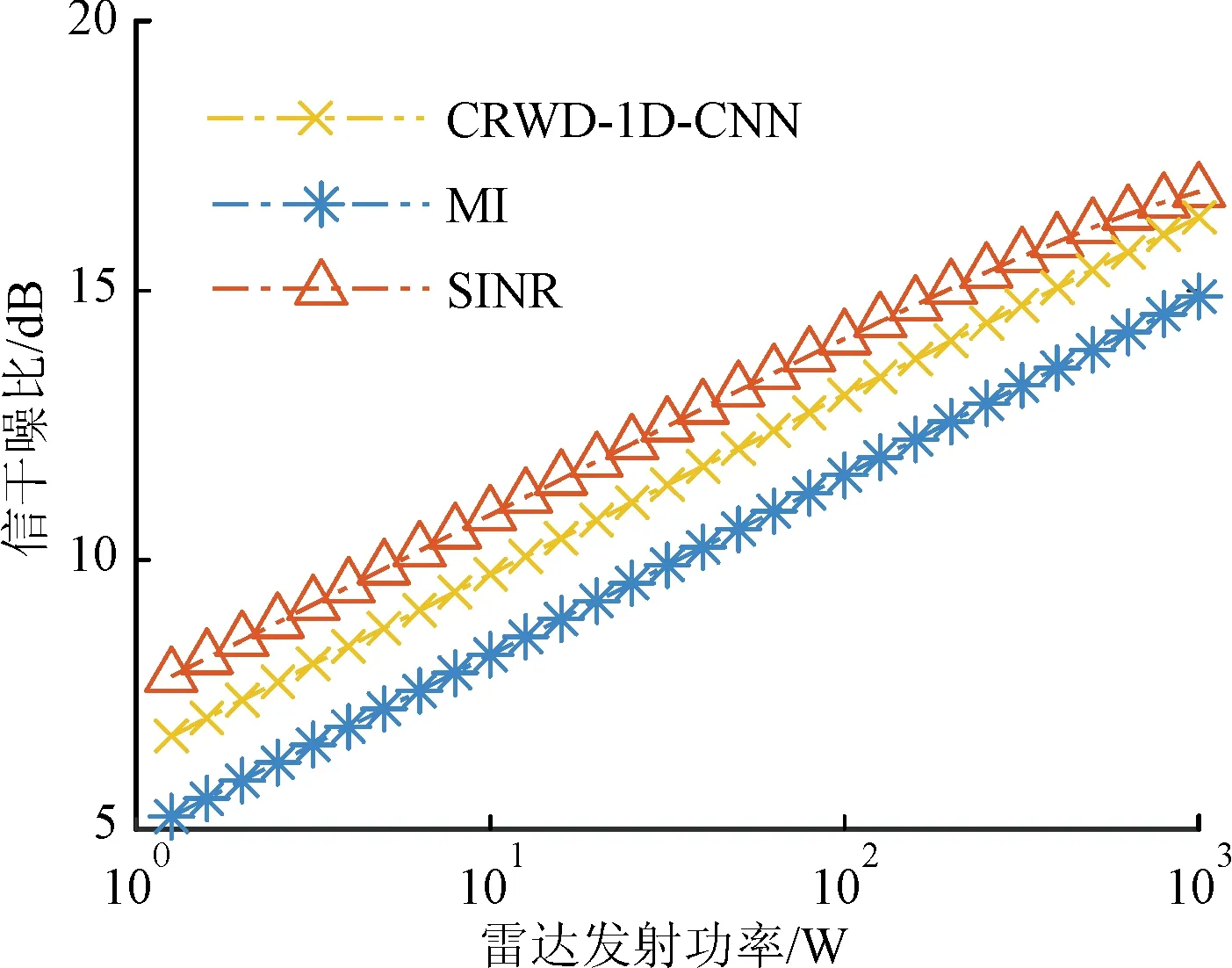
图8 不同功率下3种方法生成的信号对应信干噪比

图9 不同功率下3种方法生成的信号对应检测概率
为衡量雷达综合性能,本文提出一种目标最终识别率指标。定义
Pc=PdPr
(12)
式中:Pc为目标最终识别率,可作为衡量雷达综合性能的指标;Pd为检测概率;Pr为目标识别率。
Pr随目标与回波之间的互信息量增加而增加,但两者缺乏直接函数关系。本文提出一种用互信息量来衡量Pr的方法,定义
(13)
式中:Imx为杂波条件下发射信号为x(t)时,目标与回波之间的互信息量;Imxnc为不存在杂波时,目标与回波之间可获得的最大互信息量。
表1为3种方法生成的信号对应平均检测概率、平均识别概率和平均最终目标识别率。由表1可知,采用CRWD-1D-CNN方法生成的信号平均检测概率和平均识别率均介于两准则信号之间,即1D-CNN可在MI方法和SINR方法之间实现权衡,而CRWD-1D-CNN方法信号的目标最终识别率要比MI方法信号高0.64%,比SINR方法信号高2.13%,证明了CRWD-1D-CNN方法可联合MI方法和SINR方法生成信号,提高雷达综合性能。

表1 3种方法生成信号对应的平均检测概率、平均识别率和平均最终目标识别率
4 结 论
本文提出了一种杂波条件下使用1D-CNN的认知雷达波形设计方法CRWD-1D-CNN。利用1D-CNN对一维数据之间非线性关系的映射能力,实现了MI方法与SINR方法之间的联合。为衡量雷达综合性能,提出了一种新的最终目标识别率和利用互信息来衡量的目标识别率指标。实验结果表明,当使用CRWD-1D-CNN方法所生成的波形作为发射信号时,与MI方法生成信号和SINR方法生成信号相比,雷达综合性能指标均得到提升,证明了CRWD-1D-CNN方法所生成的波形可满足雷达同时进行检测和识别任务的需求,为联合不同准则进行多任务雷达波形设计提供了一种新的解决方案。与波形设计领域许多文献相同,本文仅得到了最优信号的能量谱分布,并没有根据能量谱合成时域信号。根据给定的能量谱合成时域信号是信号处理领域的另一重要分支,是本文的后续研究方向。
猜你喜欢
农业工程学报(2022年12期)2022-09-09
电子技术与软件工程(2022年6期)2022-07-07
雷达学报(2022年2期)2022-04-30
雷达学报(2022年2期)2022-04-30
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年9期)2021-11-02
计算机系统应用(2021年9期)2021-10-11
雷达与对抗(2020年2期)2020-12-25
舰船电子对抗(2020年5期)2020-11-26
火控雷达技术(2020年2期)2020-10-16