
无人机对地目标多帧融合定位与误差收敛特性分析*
2021-04-09 08:16鲁亚飞吴岸平陈清阳
国防科技大学学报 2021年2期
鲁亚飞,吴岸平,2,陈清阳
(1. 国防科技大学 空天科学学院, 湖南 长沙 410073;2. 中国空气动力研究与发展中心 超高速空气动力研究所, 四川 绵阳 621000)
无人机凭借隐蔽性好、造价低廉、起降简单、生命力强、不惧伤亡等特点在现代军事和民用方面受到青睐[1-3]。世界上各军事强国竞相发展无人机,美国已经研制了上百种无人机,并能够完成诸如电子战、情报监视与侦察、目标指示等任务。民用方面,无人机同样能够胜任诸多任务,包括航拍摄影、地质勘探、地区搜索等[4]。
在无人机执行区域搜索、火力引导、效能评估等任务过程中,对目标的精确定位和状态估计是任务完成的关键因素之一。无人机通过机载的光学侦察载荷得到目标的相应参数,结合无人机测量设备所得到的无人机位置参数、姿态参数求解得到目标的位置信息,定位精度高低决定了对目标的状态信息的掌控。追求高精度的定位方法,不仅需要搭载的载荷技术成熟完善,同样也需要采取误差小、计算可靠、收敛特性好的定位估计方法。
基于无人机侦察图像的目标定位问题已有持续的研究,并逐步应用于实践,然而受到误差因素多、传递链长等因素的制约,无人机对地目标定位的精度不高,难以满足高精度定位、精确导引等任务要求[5-8]。在载机特征和传感器性能有限的情况下,如何通过最优估计算法提高精度成为当前研究的热点。根据目标的性质、运动特性的不同,有不同的最优估计算法,常用的有最小二乘法、加权最小二乘法、极大似然估计方法、几何定位法、测量子集优化定位算法等。其中,加权最小二乘协同定位算法是一种常用的算法,该方法力图估计目标位置与速度。针对非实验条件下的误差补偿,诸多学者采用最小二乘法、递推最小二乘法和卡尔曼滤波器,但这主要针对线性误差的情况,且对于载体的倾斜也有要求[9-12]。文献[13]给出了一种对固定地面目标进行多点观测的无源目标定位算法,该方法避免了激光测距,仅用角度信息采用无迹卡尔曼滤波(Unscented Kalman Filter, UKF)对目标位置进行估计,多次观测对角度误差也起到了补偿作用。文献[14]设计了一种基于改进的扩展卡尔曼滤波(Extended Kalman Filter, EKF)的单站无人机无源定位方法,对提高该算法的定位精度起到了一定的效果。文献[15]采用双机交会观测方法解决了针对运动目标的定位问题,并对最佳交会角度进行了优化分析,同时采用自适应卡尔曼滤波方法提高了定位精度。文献[16]提出了一种基于蒙特卡洛卡尔曼滤波的目标定位算法,并通过飞行试验分析了定位误差随着滤波迭代次数收敛的过程,表明采用卡尔曼滤波方法可以有效提高对地目标定位的精度。
综上所述,为了提高无人机对地面目标的定位精度,通常采用多帧数据融合的方法,利用最小二乘方法、卡尔曼滤波方法等最优估计方法进行误差修正,可以有效降低目标定位误差。在多帧数据融合过程中,误差的收敛速度、收敛目标等特征是控制定位过程的关键。本文研究基于卡尔曼滤波的无人机对地目标定位方法,并对定位误差收敛特性进行分析,引入蒙特卡洛法进行仿真,分析基于卡尔曼滤波法多帧融合定位的误差收敛性、大小和分布,分析观测间隔、视线俯仰角等对误差收敛性的影响,形成若干提高定位精度的建议。
1 基于卡尔曼滤波的对地目标定位方法
1.1 典型无人机对地目标搜索定位过程
无人机在情报侦察与监视、攻击或打击目标、部队防护、电子战、武器投放、干扰、欺骗、对地支援等军事领域得到了成功的运用,对目标的搜索和跟踪定位是上述任务的重要过程。典型对地面目标跟踪定位过程如图1所示,包括区域搜索和目标识别、目标跟踪和精确定位、航线盘旋与目标详查、恢复搜索航线等过程。
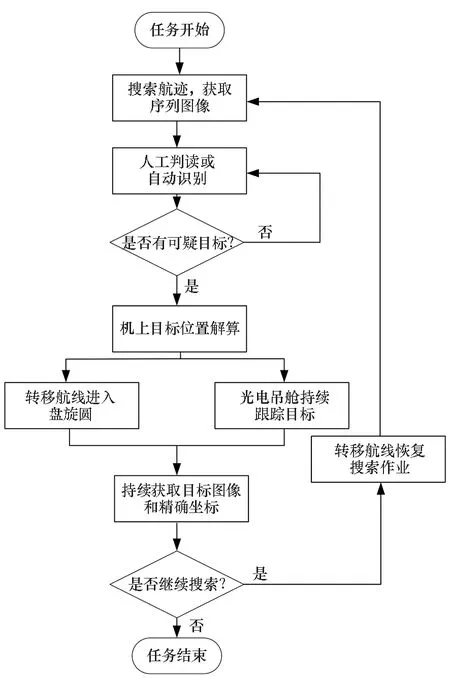
图1 无人机对地目标搜索定位过程Fig.1 Diagram of target search and location for UAV
区域搜索和目标识别过程中,无人机按照设定的搜索航线扫描指定区域,持续对待搜索区域进行扫描成像,获得序列图像,基于自动目标匹配和人工判读的方法,识别进入视场的目标;目标跟踪和精确定位过程中,基于目标在视场中的位置和偏差,手动或自动控制光电吊舱的方位角、俯仰角和滚转角,持续跟踪目标,持续获取图像,并基于机上姿态位置传感器输出,通过定位解算,获取目标位置信息;因光电吊舱的控制范围有限,固定翼无人机需要持续保持空速飞行,为了长时跟踪目标,需要调整无人机飞行航迹,如转移至基于目标坐标位置的圆盘旋航线,进一步对目标进行详查和定位;完成单个目标定位过程后,可根据任务要求,恢复设定的搜索航线或退出任务流程。
1.2 基于齐次坐标变换的目标坐标估计
无人机通过目标在成像设备(可见光或红外相机)获得图像中的位置,结合无人机自身的姿态位置、云台的指向角以及距离信息,即可求解出目标的绝对位置坐标[17-18]。目标位置求解的过程如图2所示。
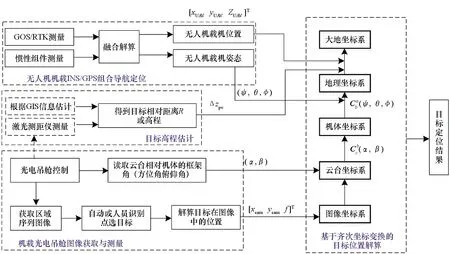
(b) 无人机对地目标定位解算框图(b) Calculation diagram of UAV ground target location solution图2 目标坐标解算过程Fig.2 Processing of target coordinate calculation
目标定位的过程是通过光电吊舱获得的目标在图像中的坐标,结合光电吊舱视线方位角和俯仰角,利用齐次坐标变换解算目标在地理坐标系下的位置的过程。
在无人机对地目标定位过程中,操作人员首先从机载相机获取的二维图像中识别并选择拟定位兴趣目标,得到目标在图像坐标系的坐标向量
[xcamycamf]T,忽略云台安装位置与机体坐标系的偏移,基于齐次坐标变换原理,目标在地理坐标系的表达可以表征为式(1)的形式[19]。
(1)

(2)
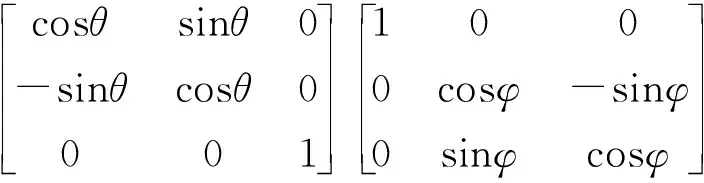
式中, (ψ,θ,φ) 表征无人机由导航传感器测得的三轴姿态角,分别为滚转角、俯仰角和航向角。
(3)
式中, (α,β) 表征云台的方位角和俯仰角。
式(1)可用于在已知无人机姿态、位置、云台指向角度以及目标在图像中的坐标的前提下假设目标区域的高度,估算无人机侦察图像中特定目标的位置。由于定位过程中涉及多个旋转变换矩阵,对机体姿态误差、云台指向误差飞行敏感,且依赖于目标区域高程的估计,会引入较大的定位误差,因此需进一步采用多点融合的方法,提高对地定位精度。
1.3 基于卡尔曼滤波的多点融合定位误差修正
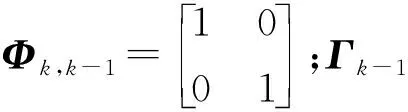
卡尔曼滤波法是20世纪60年代由卡尔曼首次提出的一种线性最小方差估计方法,其核心是在动态过程中用递推方法对状态量进行估计,并预测误差的协方差矩阵,再利用这些协方差矩阵计算卡尔曼滤波增益,进一步的以滤波增益为权值更新状态量估计值。对于线性和非线性系统,采用不同的方法计算均值和协方差衍生出了不同类型的卡尔曼滤波。由于无人机定位的观测过程是一个离散状态,故采用离散型卡尔曼滤波的基本方程建立计算模型。

Xk=Φk,k-1Xk-1+Γk-1Wk-1
(4)
量测方程为:
(5)
观测矩阵H可以通过式(6)计算得到。
(6)
基于上述状态方程和量测方程,只要给定状态变量的初值,根据k时刻量测Zk,就可以递推计算k时刻的状态估计Xk(k=1,2,…)。其算法流程如图3所示,在一个滤波周期内,从卡尔曼滤波在使用系统信息和量测信息的先后次序来看,卡尔曼滤波具有两个明显的信息更新过程:时间信息更新和量测信息更新。

图3 基于卡尔曼滤波的多点融合定位流程Fig.3 Multi-point fusing location process based on Kalman filter
2 定位误差收敛特征分析
采用蒙特卡洛方法,引入无人机对地定位过程中的典型误差源,分析定位误差的收敛特性,以及观测间隔、视线俯仰角等对误差收敛性的影响。
2.1 基于蒙特卡洛方法的定位误差仿真
蒙特卡洛方法又称随机模拟法,通过计算机产生符合条件的随机数据,用于模拟实际的试验数据。基于蒙特卡洛方法的对地定位误差仿真过程如图4所示。
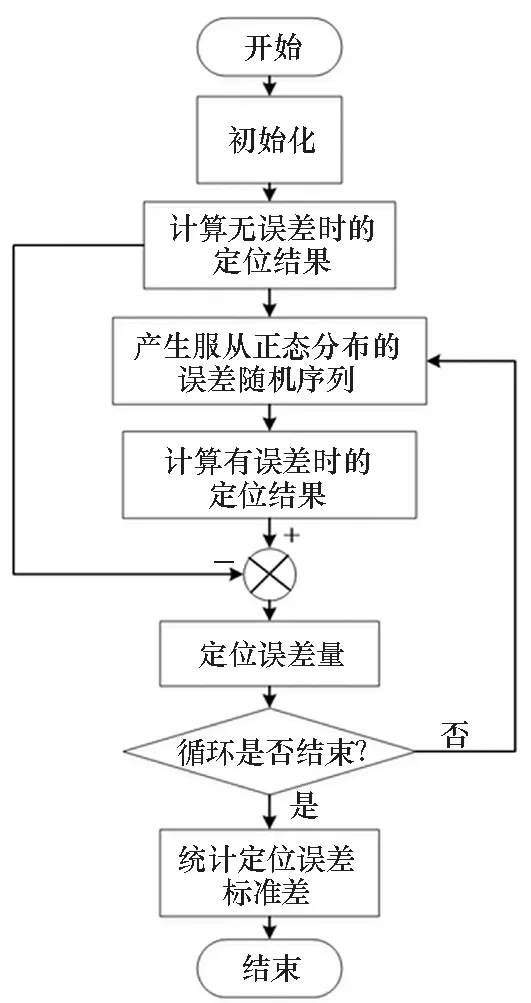
图4 蒙特卡洛仿真过程流程Fig.4 Process of Monte Carlo simulation
步骤1:参数初始化设置。假设无人机的飞行轨迹为半径R=1 500 m,相对高度H=1 500 m,测量数据的位置点平均分布在圆形轨迹上,共计180个点。目标在圆形轨迹的正中间,在飞行过程中,始终保证无人机搭载的载荷对准目标,这将使得目标在视野里,目标点的理想坐标为(0 m,0 m,1500 m)。
步骤2:无误差的目标定位结果。考虑到无人机飞行轨迹的圆心为目标,假设目标的定位结果在载机NED坐标系下坐标为(0 m,0 m,1500 m)。
步骤3:产生正态分布随机序列。根据分析的误差因素,引入相应的误差分布序列,引入的误差源的分布特征和大小如表1所示。
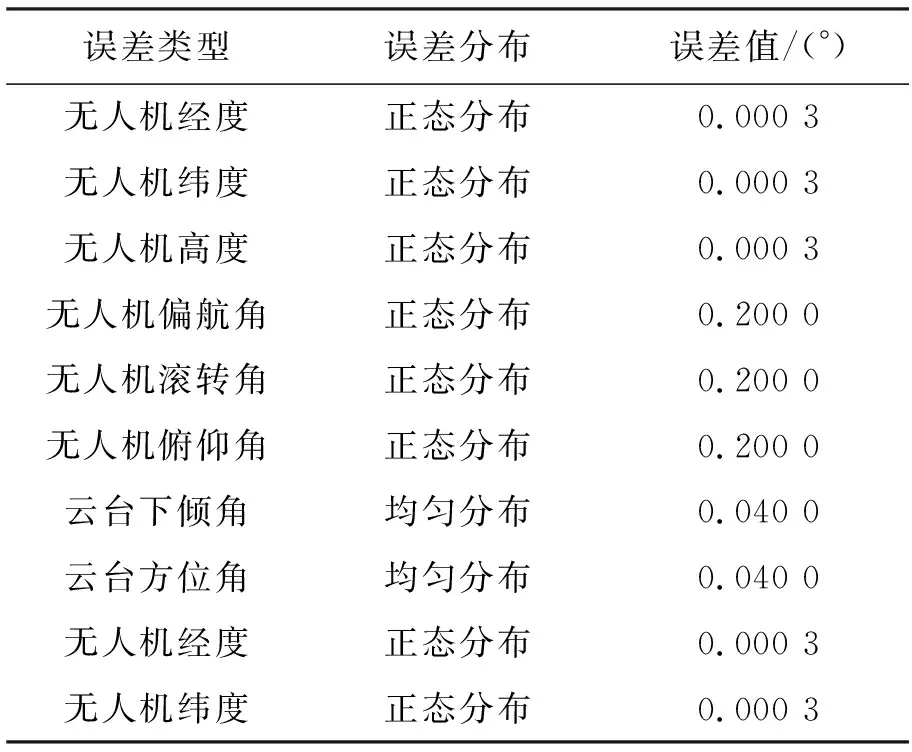
表1 误差源的分布特征与大小Tab.1 Distribution characteristics and values of error sources
步骤4:利用产生的误差分部序列求解得到目标点的位置,将其减去无误差定位结果得到误差大小。
步骤5:进行150次循环仿真,将得到的误差求解均值,从而得到定位误差的值。
2.2 定位误差分析
基于蒙特卡洛方法的多点融合定位误差仿真结果如图5所示。仿真结果表明:与单点定位结果的散布特征相比,通过采用文中方法开展多帧数据融合后,无人机对目标的位置估计值大幅接近真值。
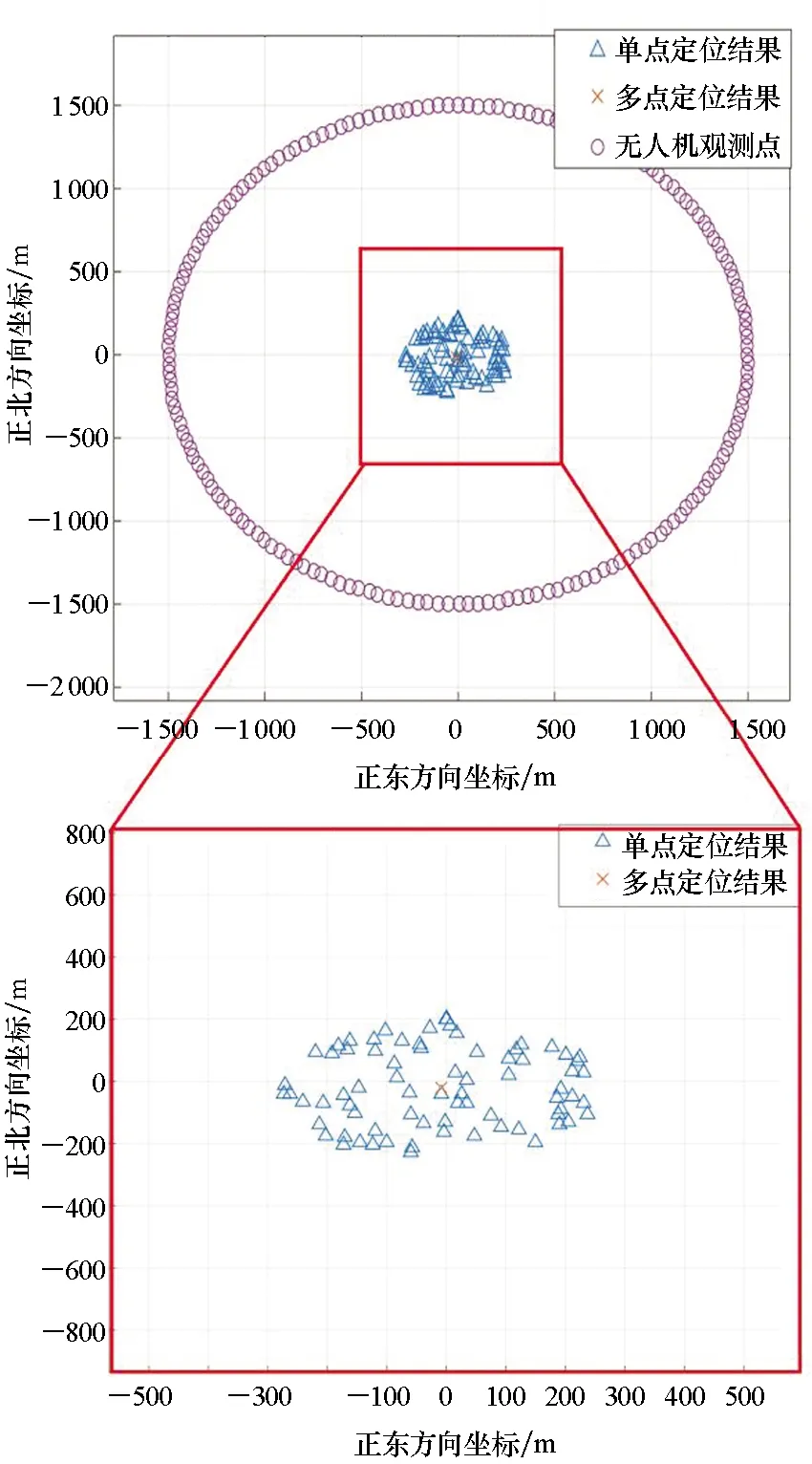
图5 多点定位误差分析仿真结果Fig.5 Simulated result of multi-point location error
为了定量分析误差收敛的过程,进一步对位置估计值在东向和北向两个方向上的收敛特征进行仿真分析。其正东方向坐标收敛过程如图6所示。其正北方向坐标收敛过程如图7所示。
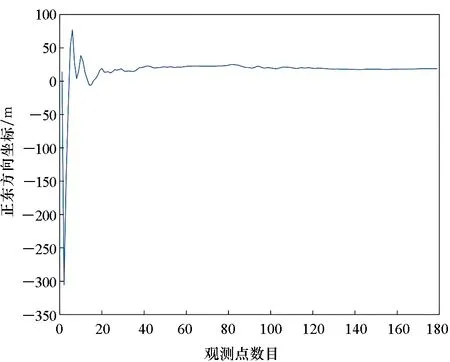
图6 东向误差收敛过程Fig.6 Error convergence course on east coordinate

图7 北向误差收敛过程Fig.7 Error convergence course on north coordinate
由图6和图7可知:在卡尔曼滤波法中,目标估计点的正东方向坐标大约从第18个观测点开始收敛;正北方向坐标大约从第17个观测点收敛;在收敛过程中,收敛曲线平缓,最后可以看到误差大概收敛的位置,这将可以估计误差的大小。
2.3 误差收敛特征影响因素分析
由于设计的无人机路径是圆形,飞行平稳,所以不考虑无人机的姿态角,只讨论观测点间隔和云台下倾角对基于卡尔曼滤波法多点定位的误差影响。
陕西省高校、科研机构、科研人员数量较多,成果及其科研成果转变逐年增加,特别是在关中地区的西安,拥有的科研组织及科研人员比重最大。因此应以西安为科技创新的核心,逐步使西安发展为高端产业、要素、人才聚集的中心;发挥西安全面创新改革辐射作用,引领关中平原各城市的建设,优化聚集发展空间格局,进而带动陕南、陕北的发展。
2.3.1 观测间隔对多帧图像定位误差收敛特征的影响
仿真中除了圆形轨迹观测点数目的改变,其余参数不变。图8为观测间隔Δθ=2°的误差收敛过程,根据收敛过程分析,得到表征收敛次数n=41,误差收敛值Δr=37.48 m。同样的方法得到的不同观测间隔条件下的收敛次数和收敛值对比见表2。
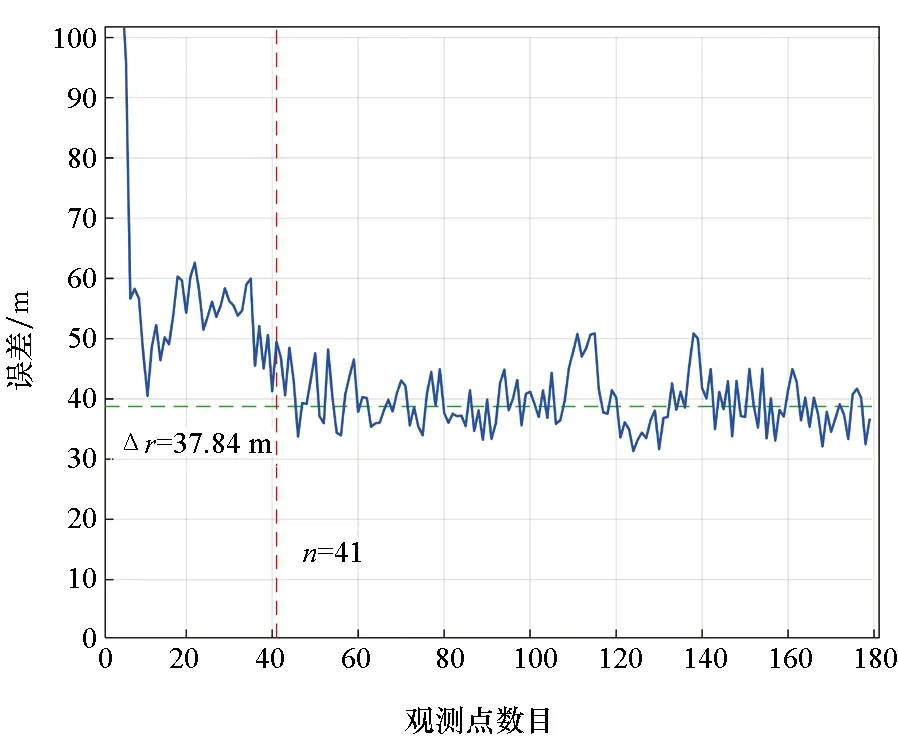
图8 观测间隔Δθ=2°的误差收敛过程Fig.8 Error convergence course when observation interval Δθ=2°
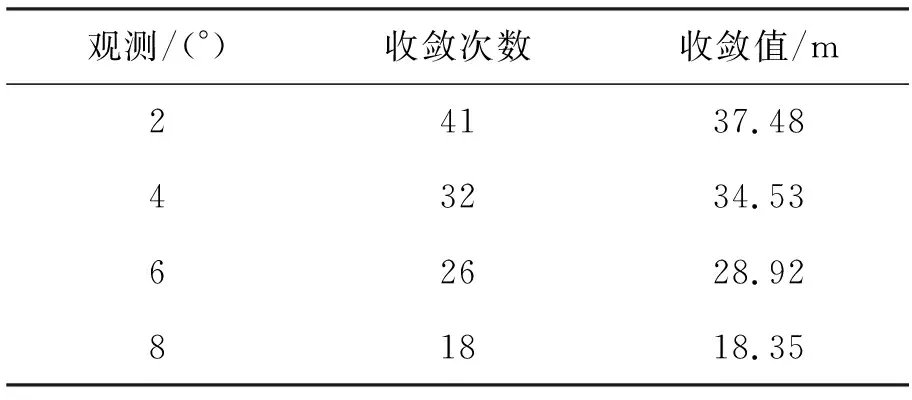
表2 收敛特性与观测间隔的关系Tab.2 Relationship between error convergence characteristic and observation interval
由表2可以看出,当Δθ增大时,误差的收敛速度加大。故在进行无人机定位过程中,观测间隔对卡尔曼滤波法定位的影响是:观测间隔越大,定位过程各个数据点之间的基线越长,无人机定位结果的误差收敛越快,且估计误差越小。
2.3.2 观测倾角对多帧图像定位误差收敛特性的影响
为了分离观测距离和观测倾角的影响,设计对目标的观测距离为D=2 000 m保持不变,观测倾角β=-30°,-40°,-50°,-60°,-70°,观测倾角β定义水平为零,向下为负。对应的飞行相对高度H=|Dsinβ|,盘旋半径R=Dcosβ,其他传感器误差分布特性见表1。无人机观测间隔Δθ=8°时,仿真结果如图9、表3所示。
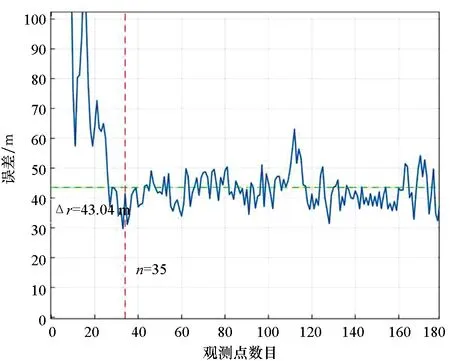
图9 观测倾角β=-30°的误差收敛过程Fig.9 Error convergence course when observation pith angular β=-30°

表3 收敛特性与观测倾角的关系Tab.3 Relationship between error convergence characteristic and observation pitch angular
由表3可知,在给定观测距离的情况下,观测下倾角越大,无人机相对于目标的视线与大地垂线方向的角度越小;则角度误差收敛速度越快,收敛值越小,反之则误差收敛速度越慢,收敛值越大。表现在飞行航迹上,即在给定观测距离条件下,应尽量以一个较小的盘旋半径进行目标定位。
同时需要注意:受到固定翼无人机机动能力限制,存在最小盘旋半径约束,且盘旋半径越小,无人机的滚转角越大,方位角的变化率越大,因为通信延时等因素带来的角度测量误差可能越大,进一步影响对地目标的定位精度。因此在实际的定位过程中,如何选择合适的盘旋半径,需要开展进一步深入的研究。
2.4 提高定位精度的建议
综上所述可以提出以下几点提高定位精度的方法:
1)通过航迹规划来提高无人机定位精度。由误差分析可以知道观测间隔对定位结果的影响,航迹规划可以提前确定观测间隔取值,同样高度的确定也影响着目标定位精度。所以航迹规划是较为关键的。
2)使用精度较高的测量设备,如高度气压计,因为相对高度的大小将影响无人机定位精度。若提高设备的精度,将减小引入的偏差,提高定位的精度。
3)采用合适的算法,有单点定位法、多点最小二乘法、卡尔曼滤波法,其定位精度越来越高,误差越来越小。所以采用合适的算法同样是提高定位的关键。
3 结论
对地目标高精度定位和定位误差的快速收敛是无人机对地目标定位需要关注的重要问题。本文基于卡尔曼滤波方法的对地目标定位数学模型,引入蒙特卡洛法对定位误差收敛特性进行仿真分析,讨论了观测间隔、视线俯仰角等对误差收敛特性的影响,形成若干提高定位精度的建议。
研究发现:采用卡尔曼滤波的方法可以有效地提升目标定位的精度,观测间隔和观测倾角对定位误差的收敛特性有影响,其中观测间隔对收敛特征的影响主要表现在对采样基线的影响,采样基线越长,误差收敛速度越快,收敛值越小。在给定观测距离的情况下,观测倾角产生的影响主要表现在观测下倾角越大,误差收敛速度越快,收敛值越小。同时不可忽视的是,对固定翼无人机而言,在一定的观测距离条件下,观测倾角的增大意味着盘旋半径的减小,实际测量过程中需要综合考虑机动能力约束、通信延时对传感器测量误差影响等因素。
猜你喜欢
临床骨科杂志(2022年4期)2022-11-24
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2022年8期)2022-08-31
制导与引信(2021年2期)2021-09-08
导航定位学报(2021年4期)2021-08-29
北京航空航天大学学报(2021年7期)2021-08-13
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
智富时代(2019年5期)2019-07-05
