基于反射探针的聚焦超声测量传感器设计和方法研究
2021-04-07 03:08:04徐遨璇曹永刚郑慧峰王月兵
计量学报 2021年2期
徐遨璇, 曹永刚, 郑慧峰, 王月兵
(中国计量大学 计量测试工程学院,浙江 杭州 310018)
1 引 言
聚焦超声分为低强度和高强度,而高强度聚焦超声(high intensity focused ultrasound, HIFU)作为一种新型的医疗手段,由于其具有对肿瘤非侵入性治疗的潜力而引起了人们的极大兴趣[1,2]。在HIFU治疗过程中,换能器将体外低声强的超声波通过某种聚焦手段(声透镜、凹球面自聚焦、电子聚焦等手段)汇聚到体内,形成高强度聚焦声场。超声声波在组织中传播并在局部焦点处沉积大量的能量,迅速增加温度并引起组织蛋白质的热变性,同时周围组织保持相对不受影响。只要HIFU的高能量被正确定位和聚焦,就不会对介入组织产生明显的副作用。潜在的HIFU治疗应用还包括止血、靶向给药和消融[2~4]。尽管HIFU已被广泛应用于各种临床试验和治疗,但仍然存在一些关键问题需要解决。因此,HIFU声场的研究和测量方法还需要跟进和发展。
用于超声声场检测的传感器主要有压电陶瓷水听器、PVDF水听器以及光纤水听器。压电陶瓷水听器在过去作为主流的声场测量换能器,在低功率下能够承受HIFU声场一定范围的声压,但是当聚焦换能器辐射功率上升后,声场内声强增大,甚至焦域处产生显著的温升效应和空化效应[5],压电陶瓷因为其固有物理属性,容易破碎,导致传感器损坏。随着偏聚氟乙烯(PVDF)材料的发现[6],因其声阻抗与水的声阻抗接近,并且具有化学性质稳定、柔软性好、质量轻、易加工、频率响应宽、动态范围大等优点[7],目前PVDF水听器更多地应用于HIFU声场的测量。PVDF水听器主要有薄膜型和针型两种类型,薄膜性水听器其外部物理尺寸大于5 cm,其有效孔径一般为mm量级,而针型的直径一般小于1 mm,但是在HIFU声场的测量中,到达一定的声强阈值,两种PVDF水听器还是容易被高声强损坏[8]。光纤水听器法[9,10]是指通过分析光纤中被声场所调制的光强度、光相位等光信号而得到声场信号的一种方法,虽然其测量空间分辨率高,但其成本昂贵且实验要求条件高。
基于上述现状,提出了一种基于散射原理的反射探针传感器,将围绕新型传感器的结构设计、聚焦声场的检测原理及方法展开研究。首先,介绍了该传感器的基本结构并通过理论计算研究了传感原理,利用数值仿真和有限元软件建立物理模型[11],运用仿真程序对传感器内部声场分布及传感器输出信号的波形和幅值进行了仿真计算;同时利用钨钢探针和PVDF压电薄膜材料,设计研制了传感器;最后,搭建实验测试系统,对中低功率下的聚焦超声的焦域声场分布进行了测量和分析,对反射探针传感器测量HIFU声场的可行性和理论仿真模型的准确性进行了证明。
2 传感原理
图1为反射探针传感器测量HIFU声场的原理简图。该传感器主要是由吸声材料制作的外壳、钨钢材质的球端探针和PVDF压电薄膜等组成。
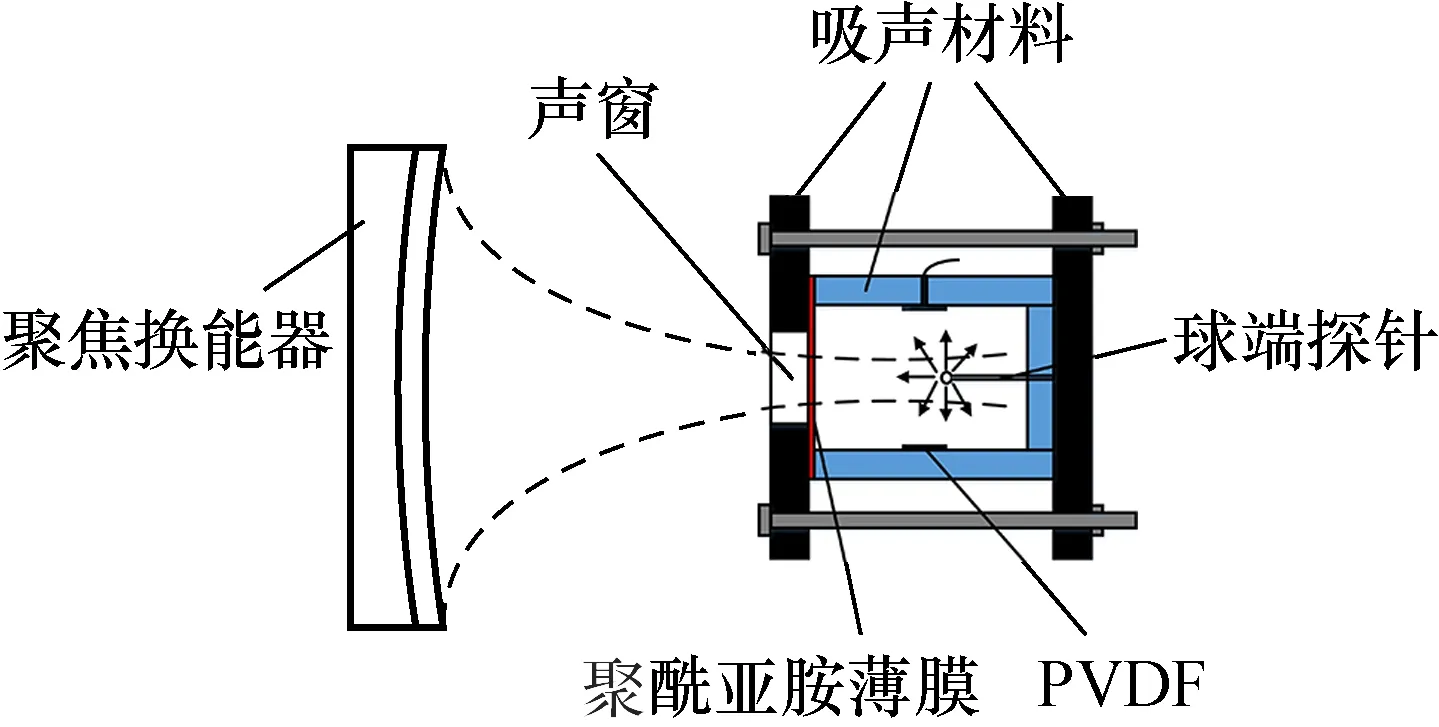
图1 反射探针传感器测量简图Fig.1 Measurement diagram of reflection probe sensor
在聚焦超声声场的测量中,声束首先透过传感器的声窗,透射进入传感器内部;其次,当声波到达探针球端表面时,会发生散射;最后,散射波传递到PVDF处,PVDF发生正压电效应,传感器输出压电信号。
在测量的过程中,利用聚酰亚胺薄膜隔绝内外水环境,传感器内部为除气水。传感器外壳采用的是吸声材料,避免了测量时传感器内部发生混响,该材料作为一种高阻尼的复合材料,抗压性能和耐水性能良好。
2.1 超声波的散射
基于波动方程理论,对超声波在介质及传感器内的传播特性进行了研究与分析。通常,聚焦声场焦域内的声波可近似看作平面波,因此超声波与传感器反射探针球端的作用过程可看作平面波垂直入射的过程,如图2所示。
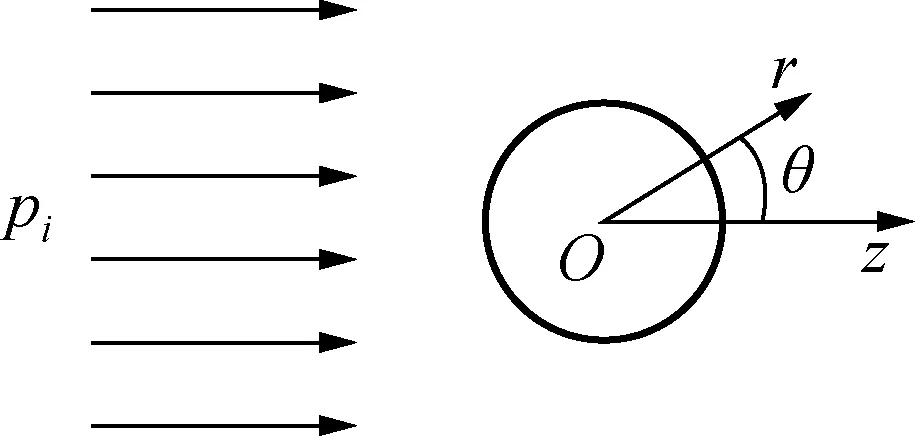
图2 平面波向球端传播Fig.2 Plane wave propagating towards the spherical end
假设聚焦换能器焦域内声波为平面波,其声压表示如下:
pi(z,t)=p0ej(ωt-kz)
(1)
式中:媒质波数k=ω/c,ω为角频率,c为介质中声传播速度;p0为焦域声波的声压幅值;t为传播时间;z为传播方向上的声传播距离。
声波在探针球端表面发生散射现象,散射波声压ps应满足波动方程。假设球面刚性不动,则探针球端的散射声压表示如下[12]:
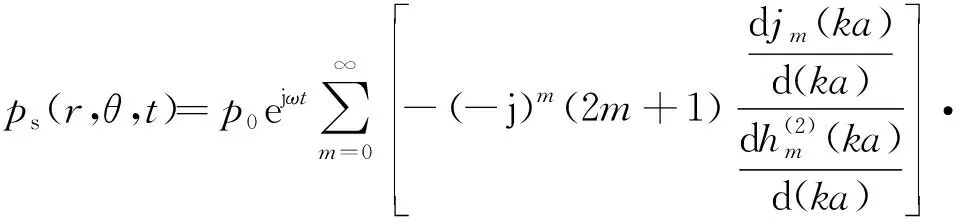
(2)
(3)
式中:α为水中超声衰减系数;x为散射波沿着θ方向的传播距离。
由式(3)可知球面散射波在声场中的各处声压值。当θ= π/2时,该方向的声场分布如图3所示,散射波声压随传播距离呈指数下降。

图3 声压随传播距离的变化(θ= π/2)Fig.3 The change of acoustic pressure with propagation distance(θ= π/2)
为了分析散射声波强度的分布情况,需要计算其散射方向性。在远场的条件下,可得探针球端散射场的方向性函数,具体表示如下[12]:

(4)
|R(θ)|是探针球端表面散射波声压的方向性函数。当取f=1 MHz,a=1 mm,c=1 500 m/s,p0=1时,散射波声压的方向特性如图4所示,反映各个散射方向声压值与入射声压值p0的比值。
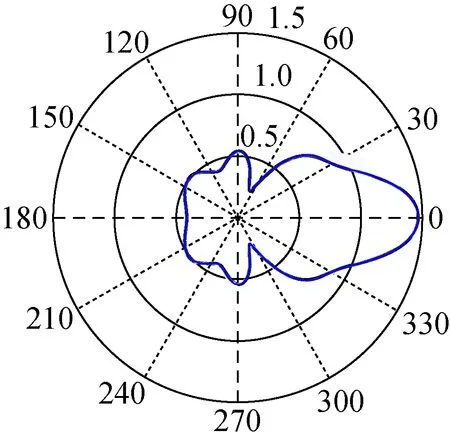
图4 散射波声压方向特性图Fig.4 Acoustic pressure direction characteristic diagram of scattered wave
探针球端的散射波作为一种次级声源存在,其声波强度的空间分布是不均匀的。在散射波声压方向特性图的基础上,可得到散射声波强度的方向特性,它是由|R(θ)|2决定。当ka值变化时,各阶散射波分量的振幅和各阶波的能量分配随ka值而变化,即散射波强度的方向性随ka值而变。当取f=1 MHz,a=1 mm,c=1 500 m/s,p0=1时,其探针球端表面散射波声强的方向特性如图5所示。
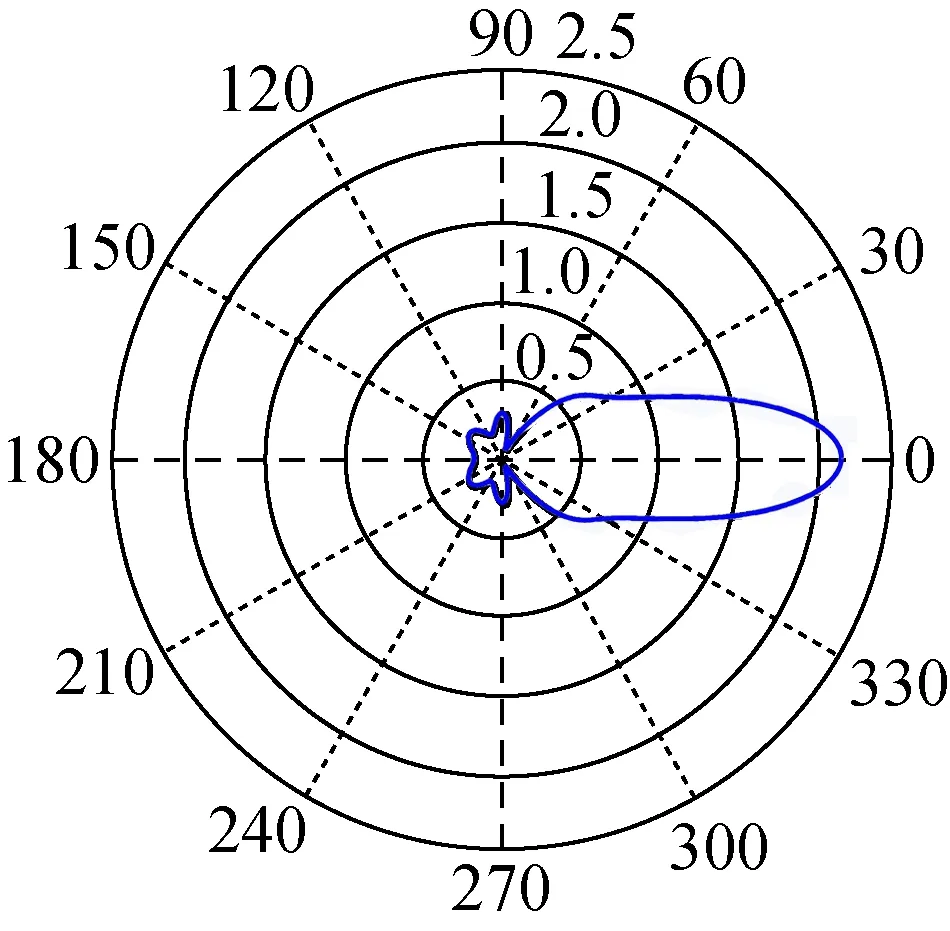
图5 散射波强度方向特性图Fig.5 Acoustic intensity direction characteristic diagram of scattered wave
从图4和图5可看出,大部分的声波能量都集中于球端的背部方向(0°方向),部分散射波集中于侧面90°方向。结合图3散射波声压随传播距离的变化,在设计制作传感器时,PVDF选择距离探针球端15 mm处,既避免距离过近,传感器受到聚焦声场旁瓣的影响,又避免距离过远,散射声波信号太小,传感器信噪比过低。这给传感器的设计提供了理论参考依据,通过测量散射波的强度来间接测量获取HIFU声场焦域的声压和声强。
2.2 超声波的散射
传感器采用PVDF压电薄膜作为传感元件,应变传感机理是压电材料的正压电效应[14]。探针球端表面散射的超声波传递到PVDF压电薄膜圆环上,会发生压电效应,这是一个机械能转换为电能,使薄膜上下电极产生电势差的过程。为描述PVDF压电薄膜的输出信号与应变之间的关系,采用第一类压电方程来研究它的应变传感机理,边界条件为机械自由和电学短路[15],即:
S=SET+dTE
(5)
D=dT+εTE
(6)
式中:SE为恒电场下弹性柔度常数矩阵;d为压电常数矩阵;εT为应力恒定时的介电常数;S为应变;D为电位移;T为应力;E为电场强度。
当PVDF作为传感元件时,外加的电场为零,这时压电方程可表示为[16]:
Di=dijTj(i=1~3,j=1~6)
(7)
式中:Di为电位移;dij为压电常数;Tj为应力。根据应力应变关系,由式(7)可得:
Di=dikckjxj(i=1~3,k,j=1~6)
(8)
式中:ckj为压电材料的弹性常数;xj为应变。
对于PVDF,不为零的压电常数只有d31、d32、d33、d24、d15这5个,且d31=d32,d24=d15。所使用的压电薄膜的电极位于D3方向,其它两个方向没有电极,即D1、D2为零。因此结合式(7)和式(8)并进行简化,得到电位移D3与应变之间的关系为:
(9)
从式(9)可看出,6个应变的改变都会引起电位移的改变。由于传感器工作时,PVDF距离探针球端较远,且PVDF的厚度很薄,故PVDF的主要传感方向为x1,即电轴方向,因此可令x2=x3=x4=x5=x6=0,这样式(8)可进一步简化为:
D3=(d31c11+d32c21+d33c31)x1
(10)
散射波从探针球端表面传播到PVDF上各位置的声程不同,故作用在PVDF各部分的声压振幅和相位也不相同。通过电荷对面积的积分可以计算出PVDF压电薄膜上的电荷总量,即:
Q=∬sqnds
(11)
式中:Q为PVDF压电薄膜一个电极上的总电荷量;qn为电荷量;s为PVDF压电薄膜面积。
假设面积为s的PVDF压电薄膜圆环分割成N个矩形微元ΔSi(i=1,2,3,4,…,N),此时每个微元近似上下电极平行,由电场高斯定律可得每个微元的输出电荷与传感应变x1的关系:
qi=D3ΔSi=(d31c11+d32c21+d33c31)x1ΔSi
(12)
式中:ΔSi为每个矩形微元的面积。整个PVDF压电薄膜圆环上的输出电荷近似为:
(13)
式中:qi为每个矩形微元上的电荷量。
基于正压电效应,PVDF进行机电转换,致使PVDF发生一定的形变,从而使上下电极产生极性相反、大小相等的电荷。因而,可把PVDF等效为一个电容器,其电容量为:
Ca=εrε0S/δ
(14)
式中:S是PVDF的有效面积;δ是PVDF的厚度;εr是PVDF的相对介电常数;ε0是真空介电常数。
PVDF采用的是进口的镀银PVDF压电薄膜,厚度为52 μm,其中上下镀银层为6 μm,镀银层为导电层。PVDF的开路电压为:
U(t)=Q(t)/Ca
(15)
在此过程中,将PVDF压电薄膜圆环等效为一电压源、电容与电阻串联的关系,等效电路如图6所示[17]。
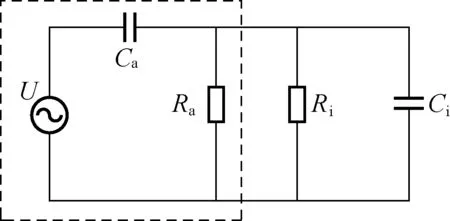
图6 传感器等效电路图Fig.6 Equivalent circuit diagram of sensor
图6中,虚线框表示PVDF等效电路,Ca和Ra分别为PVDF内部电容和电阻,U表示电压源,Ci和Ri分别为输入电容和输入电阻。
后期采用水听器比较法,可得到反射探针传感器的灵敏度。在测量HIFU声场的过程中,根据传感器的输出信号和灵敏度,可计算出焦域内球端所处位置的声压值,进一步可得该测量点的声强值[18],其计算公式为:
(16)
式中:I为声强;P为声压峰值;ρ为介质密度;c为介质中的声速。
3 有限元仿真分析
基于图1所示的传感器工作示意原理,利用有限元软件,建立如图7所示的仿真模型。模型根据实际测量参数和实验条件设定,设置聚焦换能器曲率半径为100.0 mm,开口孔径为90.0 mm且工作频率为1 MHz。同时将探针的球端置于距离换能器表面100.0 mm处,设置探针的球端直径为2.0 mm。传感器中关于PVDF的相关参数列于表1中。
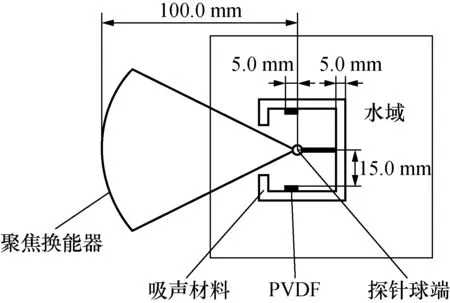
图7 有限元仿真模型Fig.7 Finite element simulation model
3.1 声场特性
为了进一步研究该传感器测量HIFU声场的过程,利用有限元软件分析超声波聚焦及探针球端表面散射效应。首先利用建立的有限元模型,采用压力声学模块进行求解,HIFU声场的仿真结果如图8所示。设置聚焦换能器的辐射压力为500 kPa,超声波传播到水域中时,会产生一个清晰可见的声场焦域范围,焦域形状为椭圆形,如图8(a),其焦域范围(-6 dB):长为19.0 mm,宽为2.0 mm;焦点处的声压值为3.5 MPa。由图8(b)可知,聚焦换能器产生的焦域内,声波的波振面几乎平行,可近似看作平面波。图8(c)给出了沿声轴方向的声压分布,声压最大值出现在距离换能器表面100.0 mm附近。根据惠更斯原理,如图8(d),HIFU声场焦域的外围会产生旁瓣现象,故在选择PVDF位置的时候,尽量避免声场旁瓣的干扰,使PVDF与探针的球端保持一定的距离。
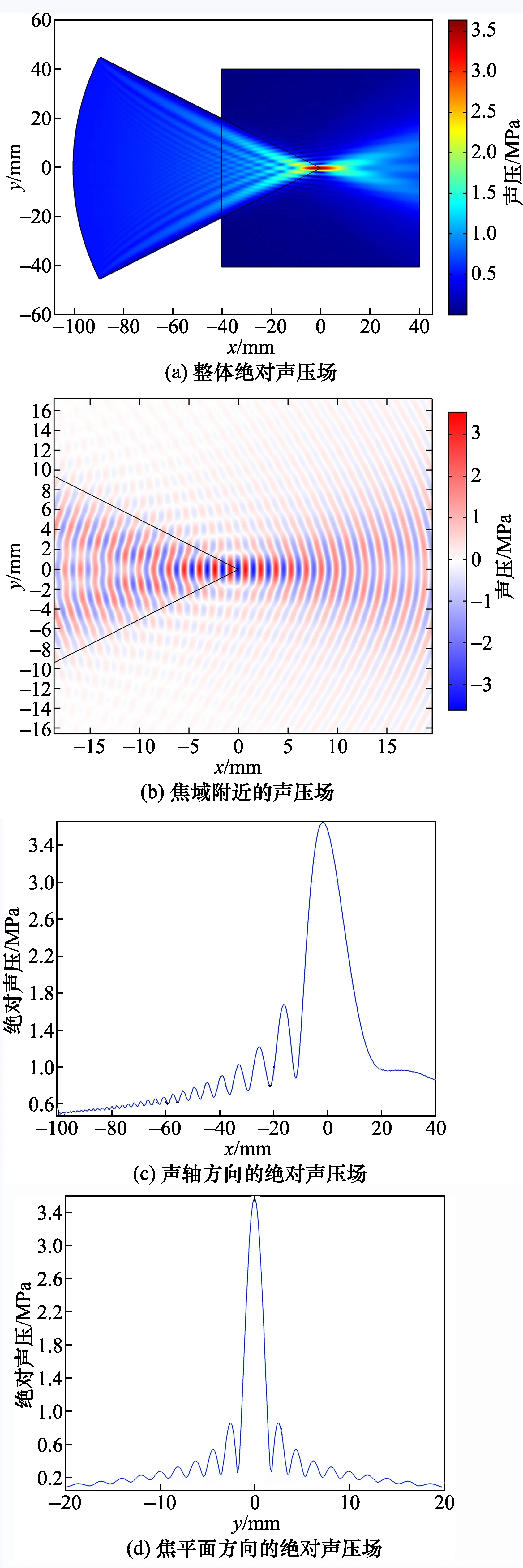
图8 聚焦换能器的声场分布Fig.8 Acoustic field distribution of focusing transducer
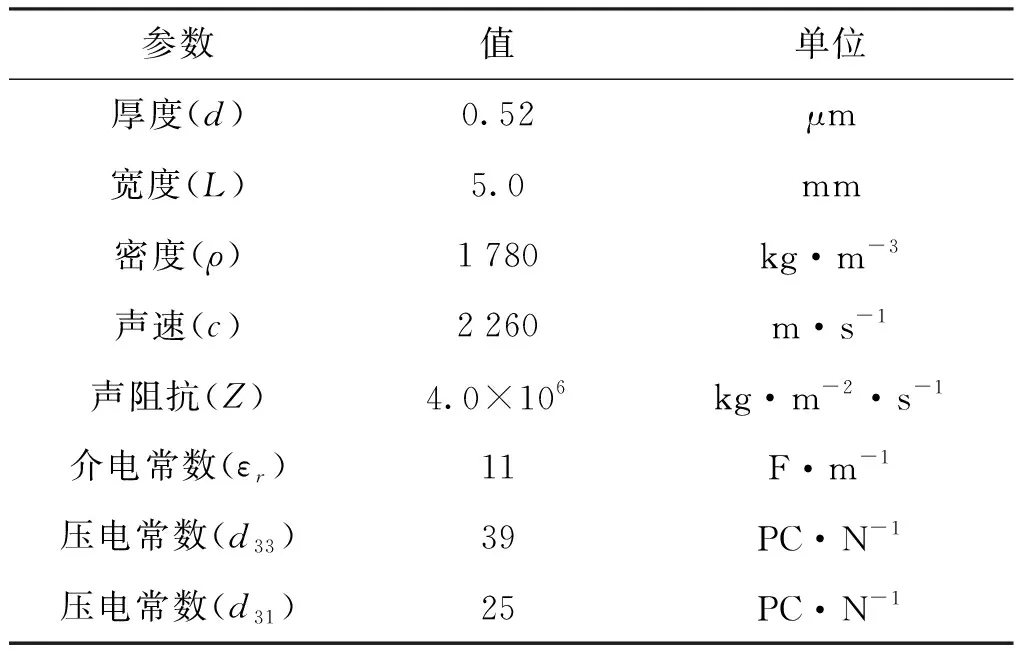
表1 PVDF材料属性Tab.1 PVDF material properties
3.2 传感器内部散射效应
模型设置时,将吸声材料边界设置为声场辐射边界,球端设置为硬声场边界,增强仿真效果。
聚焦超声在传感器内部的探针球端表面发生散射。该过程如图9(a)所示,球端作为次级声源,向外辐射声波,相较于直接测量HIFU焦域声场,极大程度上降低了所要测量的声压和声强。为了进一步定量分析,利用有限元软件中的压力声学模块求解,当聚焦换能器工作时,传感器内部的声场分布如图9(b)所示,散射声波向四周辐射。随着散射距离的增加,散射声波越来越弱。
PVDF是有机压电材料,散射波使PVDF发生压电效应,薄膜表面产生电势。为仿真该过程,利用有限元软件中的固体力学模块和静电模块,对其进行声—结构边界和压电效应两个多物理场的耦合运算。通过定量分析,求解在单个周期的正弦脉冲信号激励下的传感器输出信号。
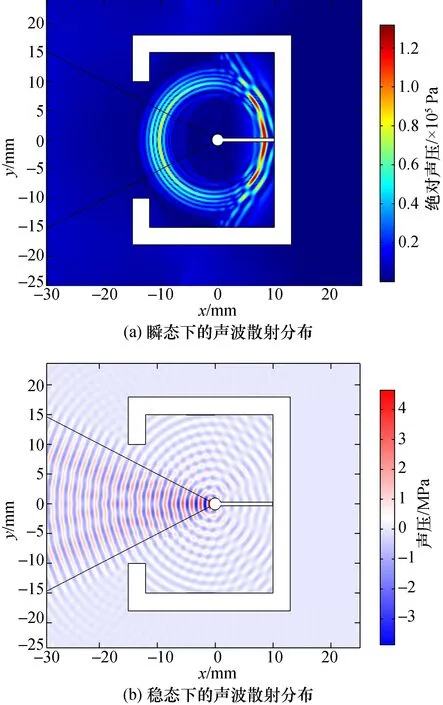
图9 传感器内部散射分布Fig.9 Scattering distribution inside the sensor
当聚焦换能器工作时,激励信号为一个周期的正弦脉冲信号,传感器输出信号的仿真结果如图10所示,呈现了一个瞬态信号的过程,且波形理想,声场干扰少。
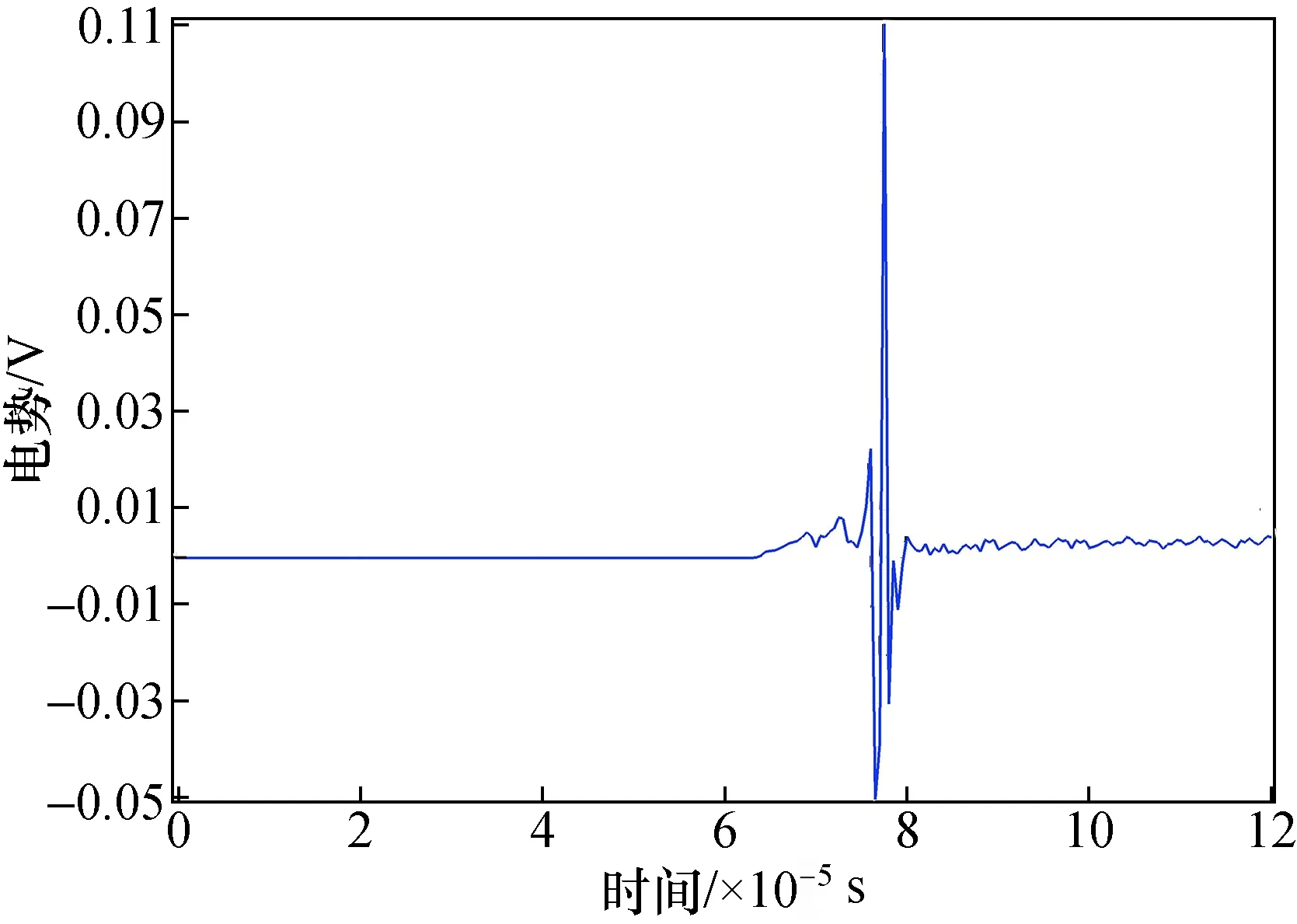
图10 传感器输出信号Fig.10 Output signal of sensor
4 实验与结果
为了进一步通过实验去验证理论方法可行性和仿真模型的可靠性,研制了传感器。为实现HIFU声场测量实验,搭建如图11所示的测试系统。通过信号发生源发送电压响应至功率放大器,进而激励凹球壳聚焦换能器工作。通过夹具夹持传感器,利用三维运动机构,对HIFU声场焦域进行测量,输出信号呈现在示波器上,最终将数据读取并存储在电脑中。
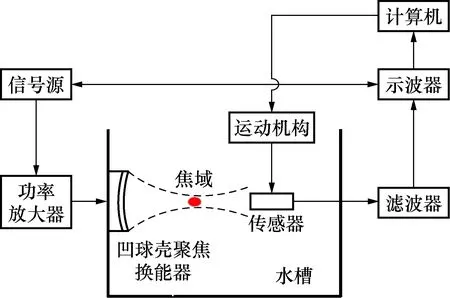
图11 测试系统Fig.11 Testing system
4.1 传感器输出信号的特性研究
设置聚焦换能器辐射声功率为9.032 W,传感器的输出信号如图12所示。当发射30个周期的正弦脉冲波作为换能器的激励信号时,传感器输出信号如图12(a)所示,呈现一个暂态—稳态—暂态的过程。当发射一个周期的正弦脉冲波作为换能器的激励信号时,传感器输出信号如图12(b)所示,波形与仿真结果(图10)能够相匹配,且实际测量值为96 mV,与仿真结果误差为12.7%。实验结果显示在输出信号最大值后面还有一串幅值较小的波形,与仿真略有差异。因为仿真是在理想的条件下进行,而实际测量时由于传感器夹持在三维运动机构上,有方向上的偏差,以及传感器浸入水中,测量环境没有仿真环境理想,有其他混杂现象的存在。
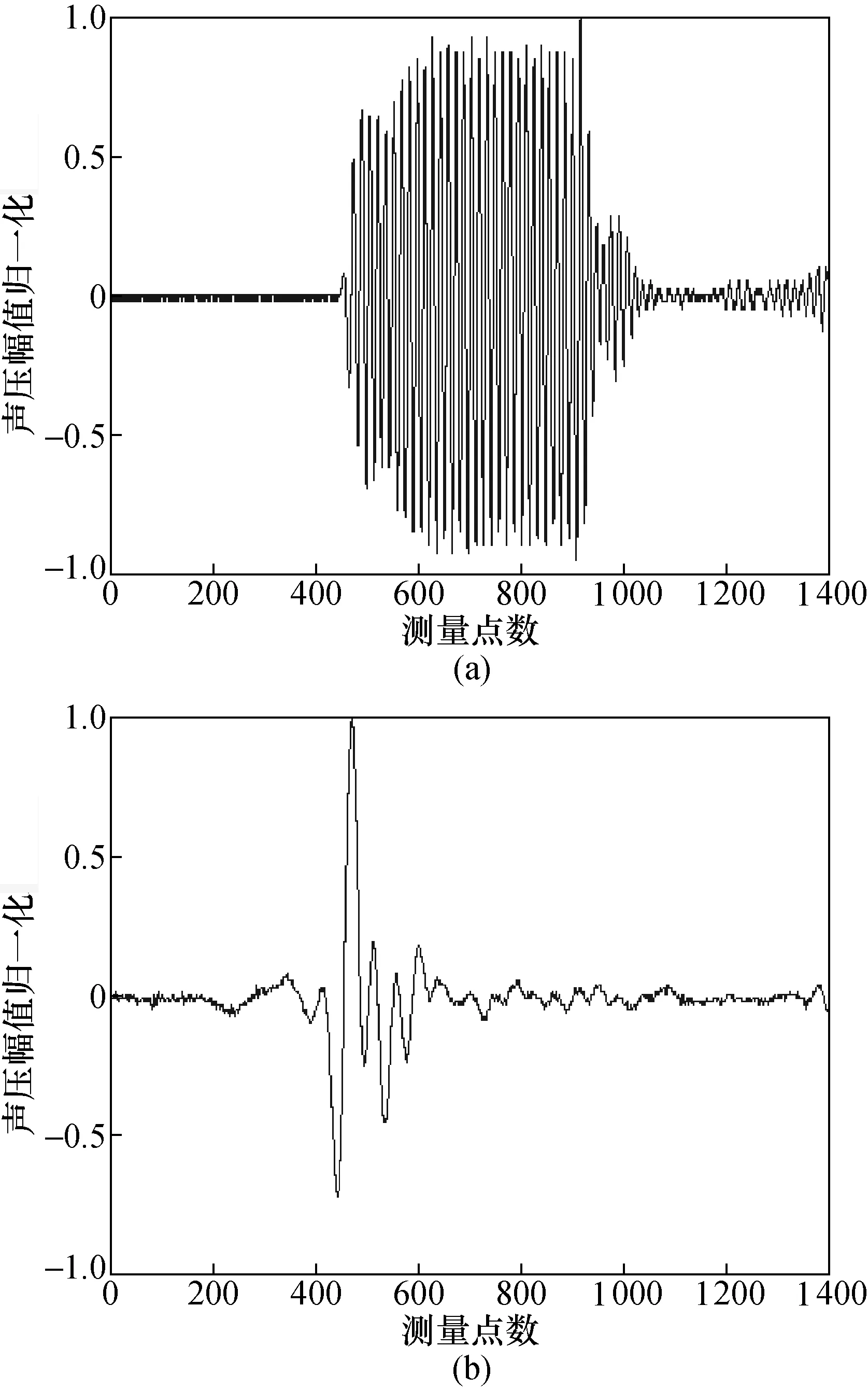
图12 传感器的输出信号Fig.12 Output signal of sensor
4.2 灵敏度测量
进行灵敏度测量实验时,分别采用针式水听器1号和反射探针传感器对聚焦换能器焦点进行测量。所用针式水听器1号已经校准,灵敏度为 -235 dB。采用水听器比较法进行校准,将针式水听器1号和反射探针传感器先后放入声场中同一位置,让两者接收同样的声压,然后比较两个传感器的开路输出电压,计算公式为:
(17)
由式(17)可知,只要测得前后放入的针式水听器1号和反射探针传感器的开路输出电压es与ex,再结合已知针式水听器1号灵敏度Ms,即可求得反射探针传感器的灵敏度。
设置聚焦换能器辐射声功率为9.032 W,分别用两种传感器测量焦点声压,测量结果列于表2。
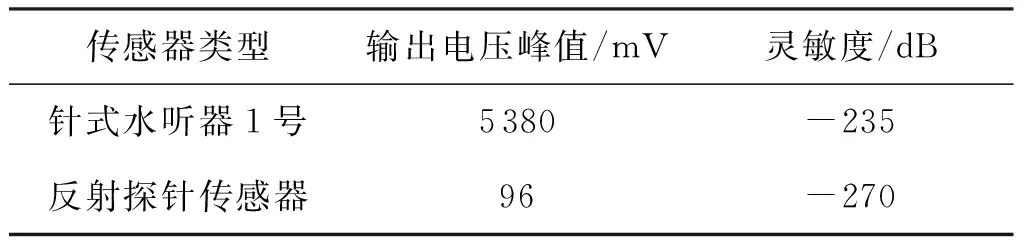
表2 两种传感器的灵敏度Tab.2 Sensitivity of two kinds of sensors
对比灵敏度测量结果,反射探针传感器接收到的散射波声压远小于焦点处声压。验证了该传感器测量声场的可行性。
为验证传感器输出信号与焦域声压值呈线性关系,设置聚焦换能器辐射声功率(0.159,0.651,1.392,2.477,3.758,5.308,7.051,7.931,8.633,9.032,9.406,9.651 W),实验结果如图13所示。当不断增加换能器辐射声功率,测量出每个辐射声功率下的焦点声压值,并对应反射探针传感器的输出信号。观察实验结果,传感器输出信号随测量点声压基本呈线性变化,能够较好地进行线性拟合,灵敏度为-270 dB,证明反射探针传感器具有良好稳定的灵敏度,能够适用于焦域声压测量。
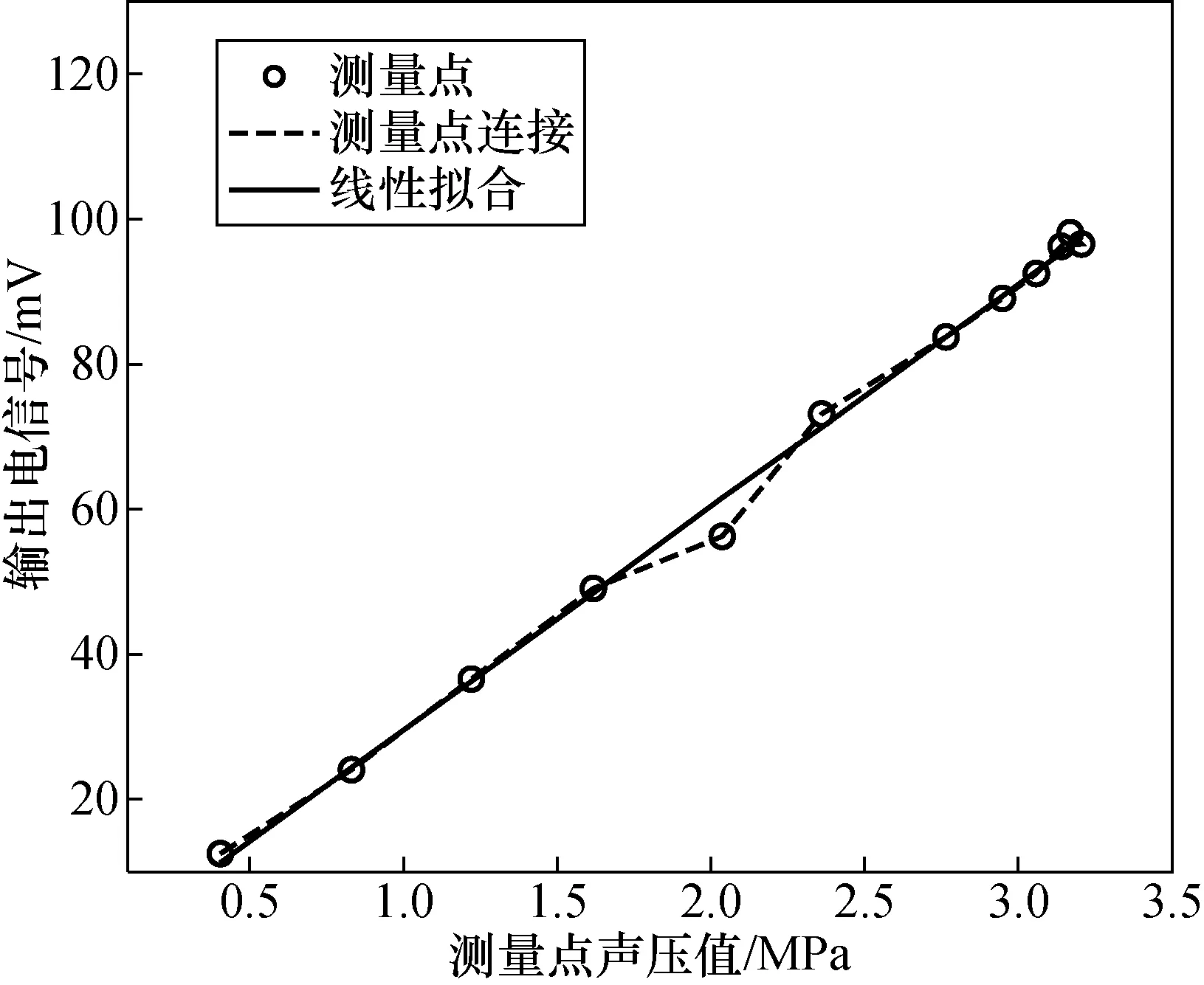
图13 反射探针传感器输出信号随焦点声压值的变化Fig.13 Change of output signal of reflection probe sensor with focus acoustic pressure value
4.3 焦域声场测量
在对焦域声场测量时,首先通过在声传播方向上移动传感器找到声压焦点所在位置。在焦点处,为了测量时能够包含大部分能量区域同时兼顾测量效率,选取测量平面为8 mm×8 mm,扫描点间隔为0.2 mm[19,20]。设置聚焦换能器辐射声功率为9.032 W,分别用针式水听器1号和反射探针传感器进行测量,测量结果如图14、图15、图16所示。
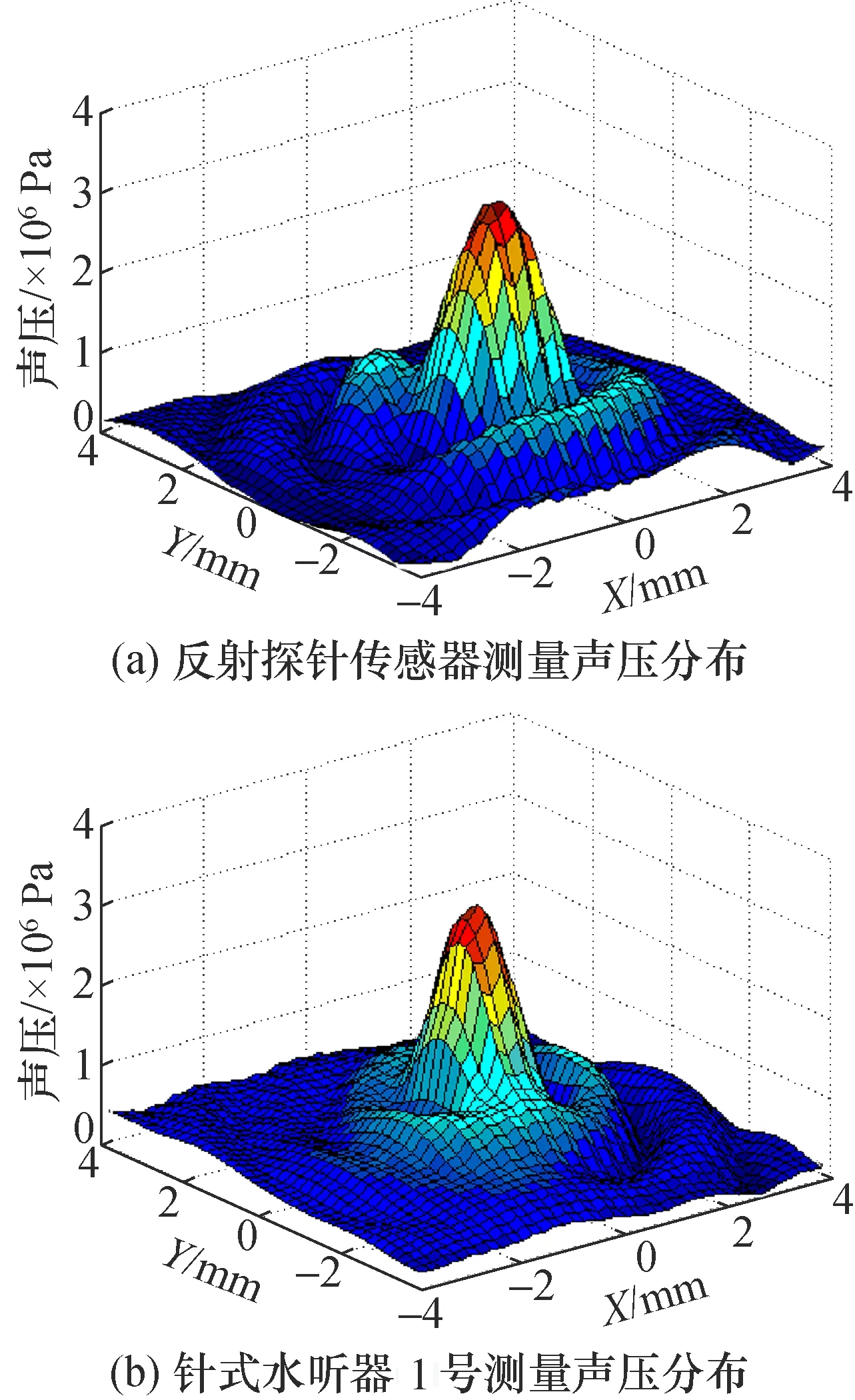
图14 声压分布测量Fig.14 Measurement of acoustic pressure distribution
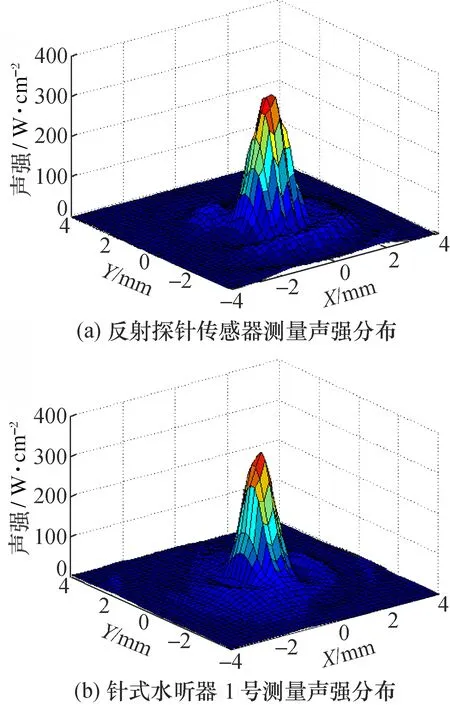
图15 声强分布测量Fig.15 Measurement of acoustic intensity distribution
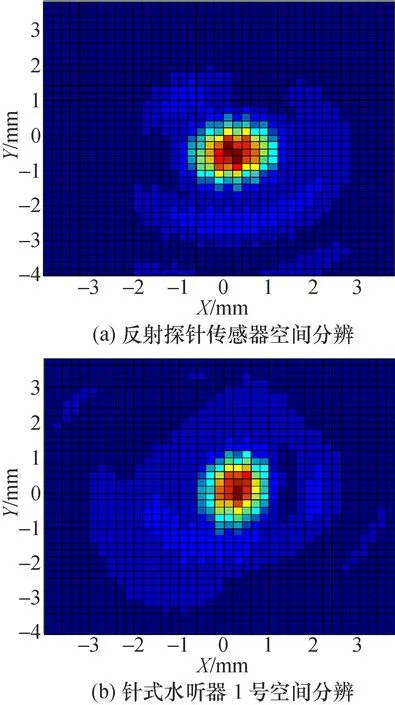
图16 空间分辨能力对比Fig.16 Contrast of spatial resolution
从图14~图16可看出,在焦点声强为327 W/cm2的情况下,两种传感器测量得到的声场分布特征较为理想,证明了反射探针传感器测量声场的准确性。实验中反射探针传感器能够和针式水听器保持良好的一致性,能够准确测量焦域的范围及其声压和声强,且空间识别度良好。
在空间分辨率上,针式水听器优于反射探针水听器。本文中新型传感器的反射探针直径为2 mm,针式水听器的直径小于1 mm。在测量声场的过程中,如图16所示,针式水听器检测的焦域范围比新型传感器小,更加精准,而反射探针直径为2 mm,在测量焦域边缘时,空间上无法测量精准,这需要减小反射探针的直径,增加精度。其次在焦域的外部,针式水听器可以测量出更低的声压阈值,即对于微弱的声压信号也能测量出来,而新型传感器由于探针球端反射,导致反射后的声信号过小,难以检测到。后期通过建立的仿真模型继续设计其结构,同时改变反射探针的直径,完善整个传感器。
5 结 论
通过建立反射探针传感器测量HIFU声场参数的物理模型,研究了传感器工作的机理。同时应用有限元软件计算和分析了传感器内部的散射声场分布,并定量预测了聚焦超声作用下的传感器输出信号。同时,研制传感器并搭建实验测试系统。实验结果与仿真结果对比,表明该模型准确可靠。
根据理论和实验研究表明,用新型反射探针传感器测量中低功率下HIFU声压和声强的方法被证实。研究证明传感器的输出信号以及空间分辨率与探针球端大小和PVDF位置有关,提出的物理模型可为进一步研制该传感器提供理论依据。而对于传感器的制作工艺的提升和传感器性能的评定,甚至后期为应用于更高功率下的HIFU声场测量还有待进一步研究和探索。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:09:20
电声技术(2022年3期)2022-04-28 00:22:50
应用科技(2020年1期)2020-06-18 02:02:36
铁道通信信号(2020年12期)2020-03-29 06:21:56
汽车工程(2018年12期)2019-01-29 06:46:36
家庭影院技术(2018年11期)2019-01-21 02:20:54
电测与仪表(2016年9期)2016-04-12 00:30:02
声学技术(2014年1期)2014-06-21 06:56:34
振动工程学报(2014年2期)2014-03-01 01:15:23
应用技术学报(2014年2期)2014-02-28 14:52:25