基于蚁群算法的既有铁路整正优化设计
2021-04-07 12:17潘振兴张少谨牛进德马敬武
科学技术与工程 2021年6期
王 博, 韩 峰, 潘振兴, 张少谨, 牛进德, 马敬武
(1.兰州交通大学测绘与地理信息学院, 兰州 730070; 2.兰州交通大学土木工程学院, 兰州 730070)
铁路线路经长时间运营后,铁路线路几何位置不可避免的发生错动问题,降低轨道平顺性,因此定期对铁路线路进行养护维修是满足列车运营必不可少的环节,铁路养护维修作业中既有线路整正是保证列车安全平稳运行的基础,也是旅客舒适性的重要保障[1-2]。铁路既有线路整正就是把偏离设计位置的直线及曲线拨正到设计位置,保证曲线轨道良好的圆顺性,在既有线路的整正计算中,基于坐标测量的坐标法因其操作的安全性,理论的严密性和计算的准确性而得到了广泛的应用[3-5]。
在诸多既有线路坐标法整正优化研究与应用中,基于这些算法的既有线平面整正优化通常集中于对既有线路单一曲线的整正,只考虑了半径及缓长对单一曲线拨道量值的影响,而忽略了线路整体各线形之间的相互影响和现代铁路快速发展对线路高平顺性的要求[1-5]。随着计算机的不断发展,以及高精度测量仪器的应用和普及,线路工作者可以很容易的得到既有线全线高精度,高密度的测量数据,李响等[6]结合具体的线路改建工程,采用实时动态测量(real time kinematic,RTK)技术实现了铁路既有线中线的复测工作。陈勇[7]运用三维激光扫描仪实现了轨道的绝对坐标测量。中铁工程设计咨询集团有限公司航测遥感院研制出了专门用于既有线有砟轨道的单轨测量装置[8]。何永军[9]结合中国既有线有砟普速铁路轨道养护的现实情况,研制出了专门用于既有线有砟普速铁路轨道测量的轨道分中测量器。目前基于精密控制网设站,全站仪配合轨道精调小车(轨检小车)组成的轨道精密测量系统,测量线路连续三维坐标成了主要的既有线路坐标绝对坐标测量方法[10]。
如果能根据高精度测量手段得到的既有线路全线坐标,考虑全局之间线形变动的相互影响,以既有线路整体做最优化处理,将显著提高既有线整正效率。为此,结合蚁群算法在空间组合优化的优良性能,构建了基于蚁群算法的既有线平面整正优化设计方法,实现了既有线路的整体整正。
1 蚁群算法
蚁群虽然视力不发达,但它们却能寻找到一条从食物源和蚁穴间的最短路径。并且在周围环境发生变化时,蚂蚁能自适应地搜索新的最佳路径。研究发现蚂蚁能够找到最优路径的主要原因是蚂蚁之间通过遗留在路径上外激素物质进行信息传递,这种外激素物质被称为信息素。蚂蚁在行进过程中能够感知这种物质,并指导自己的行进方向[11]。受蚂蚁觅食时搜索路径行为的启发,意大利学者Marco Dorigo通过模拟蚁群觅食而提出了一种新的群体智能算法,即蚁群优化(ant colony optimization,ACO)[2]。
蚁群算法作为一种有效的工具来解决离散变量组合优化问题,现以运用到各种实际工程及各领域中,取得了许多的成果。如机器人路径规划、二次分配、组合优化等。根据其原理及优势道路工作者将其引入道路工程的设计及优化中,如公路平纵面优化设计及铁路初始纵断面优化设计[12-14],结果表明该方法速度快、效率高,所得结果满足工程设计的要求。
2 基于蚁群算法的既有线平面整正优化设计
2.1 单一曲线整体优化原理
铁路线路由直线,圆曲线以及缓和曲线组成,而由直线-缓和曲线-圆曲线-缓和曲线-直线组合的铁路线形为单一平面曲线,也是铁路曲线常用的组合方式。而现有的既有线整正大多也是基于单一平面曲线组合的整正优化[15-17],其基本原理如图1所示。

图1 单一曲线计算示意图Fig.1 Schematic diagram of single curve calculation
图1中,根据直缓点(ZH)前面的既有线路坐标拟合得到前夹直线的参数信息(斜率、截距),根据缓直点(HZ)后面的既有线路坐标拟合得到后夹直线的参数信息(斜率、截距)。进而求出曲线偏角(α)及交点坐标(XJD,YJD)。根据曲中(QZ)点附近的既有线坐标或圆缓点(YH)和缓圆点(HY)中间的既有线路坐标值拟合求出初始半径(R),根据圆曲线圆心点O与直到距离D1、D2和半径及內移距P1、P2间平面几何关系,求出两个初始缓和曲线长l01、l02,通过初始半径及初始缓长,曲线偏角可得出曲线初始的各主点坐标。根据拨道量优化方法以不同的半径及缓和曲线长组合应用拨道量计算公式可求出不同半径及缓长组合下既有线路各测点的拨道量值,从而比选出最优拨道量。
2.2 蚁群算法平面整体优化原理
以整正单一曲线方法及原理为参考,实现蚁群算法的整正既有线路拨道量优化。如图2所示,以线段为例,测量得到一整段既有线路测量数据,包含两个曲线段,通过拟合得到直线段,圆曲线段参数和各主点坐标值,划分既有线路测点所属线形,通过投影得到各测点的拨道量值,改变线形参数优化拨道量值。拨道量的优化不再是改变单一曲线的半径与前后缓和曲线长(R1、l011、l012)或(R2、l021、l022),而是通过蚁群算法改变两个交点坐标,交点JD1、JD2坐标的改变使两个直线段的斜率(k1、k2)或(k1、k3)发生变化,直线段参数发生变化,必定带动两个曲线段的最优线形参数发生变化,通过这样的原理,不断改变交点坐标,匹配最优曲线参数,实现整体线路的优化。
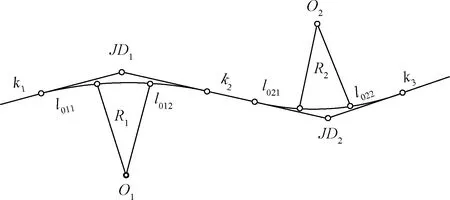
图2 整体线路参数示意图Fig.2 Sketch map of overall line parameters
2.3 初始线形参数计算
测量得到既有线路整体的测点坐标后,要计算测点的拨道量值,首先要判断测点的线形属性(直线、圆曲线、缓和曲线),不同线形的测点采用不同的拨道量计算公式[18]。通过人工直接判别很难大致提取测点的粗略分段,根据单一曲线常用的“粗略分段+精确分段”方式实现既有线坐标的线形分段。根据平面线形的曲率变化特征,通过曲率对既有线数据进行粗略分段,得到所有直线段及圆曲线段的大致位置,再通过直线段以及圆曲线段的不同最小二乘法拟合出直线段及圆曲线段的参数值。通过这些参数值得到初步的桩点直缓点、缓圆点、圆缓点和缓直点坐标值,通过这些主点坐标重新划分铁路既有线测点坐标的大致位置,根据最新二乘法重新拟合直线段以及圆曲线段的参数信息,重新计算4个桩点的坐标值,再划分既有线所处线形位置。通过这样不断迭代,直到4个桩点的坐标变化到一定的迭代精度即可,以此时的参数信息及主点坐标为既有线路的初始线形。
2.4 蚁群算法拨道量优化
根据前面通过最小二乘法迭代得到的既有线路精确分段,得到既有线路夹直线交点坐标及曲线参数信息。以既有线所有交点坐标为初始值,采用网格法划分交点坐标,运用蚁群算法全局寻优的方式得到既有线不同的交点组合,结合方向加速法优化交点组合下满足约束的最优曲线参数(半径、缓长)及拨道量值,逐步精细网格划分,运用蚁群寻优,得到满足约束的平面整体最优拨道量值。
3 蚁群算法优化模型求解
3.1 设置初始解环境
通过划分网格的方式为蚁群优化提供初始的基准,如图3所示,将一个交点划分为9个不同的值,原始交点如图3所示的点位5,在点位5的基础上沿x方向或是沿y方向平移Δx或Δy大小,得到8个不同的坐标值。以同样的方式对所有最小二乘法拟合得到的交点划分成网格。

图3 网格划分示意图Fig.3 Sketch map of divided meshes
对每个交点划分网格后,得到如图4所示的形式,每个交点有9个坐标值,每个坐标值都是可能的交点对应的最优坐标值。蚂蚁在一个交点的9个坐标值中选择一个值,并开始到达下一个交点位置,再从下一个交点位置中的9个坐标值中选择一个值,采用一样的方式,从第一个交点开始到最后一个交点结束,则蚂蚁从起点到终点的一次完整选择构成了一个可能的平面设计线方案。为了线路的平顺连接,既有线路的起点和终点保持不变,变化的是交点坐标。

图4 路径分部示意图Fig.4 Sketch map of path
如图4所示,蚂蚁从第a个交点中选择了第5个坐标值,又从第b个交点选择了第2个坐标值,用La5b2表示蚂蚁选择的从a到b路径。蚂蚁又从b个交点第2个坐标值出发选择了第c个交点的第1个坐标值,用Lb2c1表示蚂蚁选择的从b到c路径。以此类推,完成整个平面的路径,选择的各交点坐标不同,则每条路径代表不同的交点组合,在每相邻的两个交点之间形成一条路径,将所有的路径相连便可得到一组可能的交点坐标组合设计方案。再对每个交点对应的曲线匹配符合约束条件的最优曲线参数,便可得到一条设计线路(图5)。

图5 既有线铁路设计线形示意图Fig.5 Sketch map of existing railway design
3.2 参数设置
3.2.1 信息素
(1)第1轮循环。即在蚂蚁第一次选择交点时,因不知道那组交点组合为最优,所以在初次循环时蚂蚁选择每个交点中9个坐标值的概率应该是相等的,应在首次循环时设置相同的信息素浓度。
(2)第2~NC轮循环。蚂蚁在第一次循环时,每次面对到达下一个交点的九条路径是随机相等的。第一轮循环结束后根据拨道量计算结果更新各条路径的信息素,即第2~NC轮循环蚂蚁移动都是按照每条路径上遗留的信息素浓度大小来进行选择。
3.2.2 蚁群规模
ACO算法依赖于蚂蚁的数量和迭代循环次数,蚁群蚂蚁的数量提高可以增加ACO算法的全局搜索能力,使优化算法的结果更加具有可靠性。蚂蚁的数量减少,搜索的随机性减弱,可以减少优化算法过程,但往往得不到最优解,只得到一个局部最优解。但蚂蚁的数量不是越多越好,蚂蚁的数量增加,虽然加强了全局的搜索能力,但是会使各条路径上的信息素含量差值不明显,信息正反馈的作用得不到体现。过多的蚂蚁还会增加计算过程。蚂蚁数量的选择应根据ACO算法的工程应用实例结合设计问题的特性采用不同蚁群规模对平面优化问题进行试验后,得到了合适的蚁群规模。
3.2.3 蚁群移动方式
蚂蚁的移动方式如图4所示,m只蚂蚁从第1个交点开始选择,按照概率依次选择每个交点网格中的一点,直到选择完最后一个交点网格中的一点,得到m组平面交点方案。蚂蚁的移动需要遵循这样的规则,在依据第i个交点所构建的9个网格点中选择一个点,然后依次在每一个交点所构建的9个网格点中选择一个点,直到终点。防止出现跳跃式选择交点坐标。
蚂蚁从一个交点选择下一个交点9个网格点中的一个点是根据线路上的信息素浓度大小通过轮盘概率选择的。轮盘概率选择用随机选择方式,等同于自然界蚁群根据信息素浓度随机选择路径。根据信息素浓度计算选择概率,其表达式为
(1)
根据轮盘概率法的原理,浓度越多被选择的概率越大。具体过程如下。蚂蚁接下来要到达一个交点,假设可供选择的交点坐标有3个,根据信息素浓度计算公式每个交点被选择的概率P=[0.2 0.3 0.5],则路径概率累加和Pcum=[0.2 0.5 1],在选择路径的时候,计算机随机生成[0,1]的数,看这个数在Pcum中是处于那一段落。Pcum每一段的长度就代表了原来的概率(P),随机生成的数落在哪一段,就选择哪一条路径。
3.2.4 循环次数
ACO算法要进行多次的循环迭代才能实现优化,m只蚂蚁在完成一轮运算后根据目标函数值的大小,更新路径上的信息素,开始下一轮的运算,结束后重新计算目标函数值大小,更新所有信息素,又重新开始下一轮的运算,直到完成所有的迭代次数。当完成迭代次数后得到的交点坐标便是交点移动Δx,Δy大小时的最优交点组合。
3.3 目标函数计算和信息素的更新
当m只蚂蚁都完成搜寻路径的过程后,一轮循环结束,可以得到m个平面交点组合即得到了m组平面设计方案。根据m组方案计算得到m组拨道量值,根据m组拨道量值的大小更新此次循环中的m条路径信息素。然后开始下一轮循环。
3.3.1 拨道量值计算
根据m个蚂蚁得到m个方案,有m组不同的交点组合,根据这些组合重新根据曲线与直线段匹配最优半径及缓和曲线长,求得拨道量值。
(1)直线斜率及转角计算。两个交点之间确定一条直线,根据如图4示的信息,交点a、b之间确定一条直线Lab,交点b、c之间确定一条直线两条Lbc,两条直线Lab与Lbc确定一个转角。同理,根据所有的交点两两确定一条直线,两直线确定一个转角,便可求得所有的直线斜率及交点所对应的曲线转角。
(2)匹配最佳曲线参数。得到各交点所对应的曲线转角后,影响交点所对应曲线拨道量大小的因素只剩下半径R,前后缓和曲线长l01、l02。匹配好最佳的曲线参数后便可得到此组交点对应的拨道量值。曲线转角发生变化后,所对应的半径及缓和曲线也必将发生变化。匹配整条线路所对的所有最佳半径及缓长的方式采用单一曲线整正所用的方向加速法。其原理和单一曲线整正一致,不同的是方向加速法所对应的函数模型因变量增大[19],约束条件增多[20]。

(2)
式(2)中:F(x)为线路在各约束条件下的拨道量总值;di(x1,x2, …xs)为每组半径缓长下各既有线坐标对应的拨道量值,n为既有线坐标个数;gu(x)为基本约束函数,其中u为基本约束条件个数,当线路各半径缓长取值满足基本约束时max[gu(x),0]取0,当线路各半径缓长取值不满足基本约束时max[gu(x),0]取gu(x)函数值;x1=R1、l011、l012;x2=R2、l021、l022;xs=Rs、l0s1、l0s2;s为交点个数;r为惩罚因子,rk为方向加速法第k次循环时的惩罚因子数;m为一个交点对应的基本约束,sm为所有交点对应的基本约束。运算步骤同优化单一曲线一致。通过方向加速法(Powell)的优化,便可得到既有线路的最优拨道量值。
Powell法目前是求无约束最优化问题直接法中最有效的方法之一[21],因其求函数极值时不需要求导的特点恰好解决了拨道量目标函数求导困难的问题而被广泛应用[22-24]。
3.3.2 信息素的更新
信息素的更新是下一轮循环的基础,ACO算法的寻优过程就是蚂蚁按照信息素浓度选择行走路径的过程。信息素的更新方程为
τij(t+1)=ρτij(t)+Δτij
(3)
式(3)中:τij(t)表示t时刻路径Lij的信息素浓度;ρ为挥发系数,0<ρ<1,表示信息素浓度随时间而衰减的情况(如在第一次循环完之后,要更新信息素,则在第一次循环中的信息素浓度要降低,然后加上信息素增量作为第二次循环中的信息素浓度);Δτij表示经过一次循环后根据路径的长度对信息素进行增加的增量。信息素增量通常以式(4)的方式进行更新。
(4)
式(4)中:Δτij取0时表示蚂蚁未经过的点Δτij取0。Q为常数,取初始的拨道量值;Lk为蚂蚁k本次循环中选择的交点组合对应的拨道量值。
3.4 缩小优化范围逐步求精
重复上述的过程,经过NC次循环后大多数蚂蚁将收敛到最优交点组合的路径上,得到交点移动Δx、Δy大小时的最优交点组合。但此时的Δx与Δy过大,无法精确交点坐标值,所以需要进一步缩小范围,即减小Δx、Δy。
如图6所示,以交点移动Δx、Δy大小时的最优交点组合为中心,重新划分网格,Δx与Δy的大小缩小为原来的一般,即交点移动Δx/2、Δy/2划分新的网格。

图6 缩小搜索范围示意图Fig.6 Sketch maps of choosing reduced area
重新划分网格后,按照3.1~3.3节所述过程重新计算最优交点组合。继续按照减半缩小Δx与Δy的大小,直至网格的密度达到要求为止。
4 工程实例
结合兰新线上行线K103-K114段轨检小车按5 m间隔采集数据(线路包含6段曲线段),如图7所示,以最小二乘法拟合的交点坐标及半径缓长为初始值,对既有线进行蚁群迭代拨道量值优化,根据现有的蚁群优化道路案例和实验尝试,蚁群优化选取蚂蚁个数(m)为200个;迭代次数NC为20次;信息素挥发系数(ρ)为0.5;信息素强度(Q)选择初始蚁群迭代拨道量值(即最小二次拟合后的拨道量值)时优化效果最好。各蚁群参数的选取之间相互影响,具体可参考文献[25]所述,文献[25]中详细的验证与解释了各参数的选取与之间相互影响。采用的网格划分采用Δx,Δy选取初始为1 m,然后迭代直到小于1 cm停止。共迭代8次。
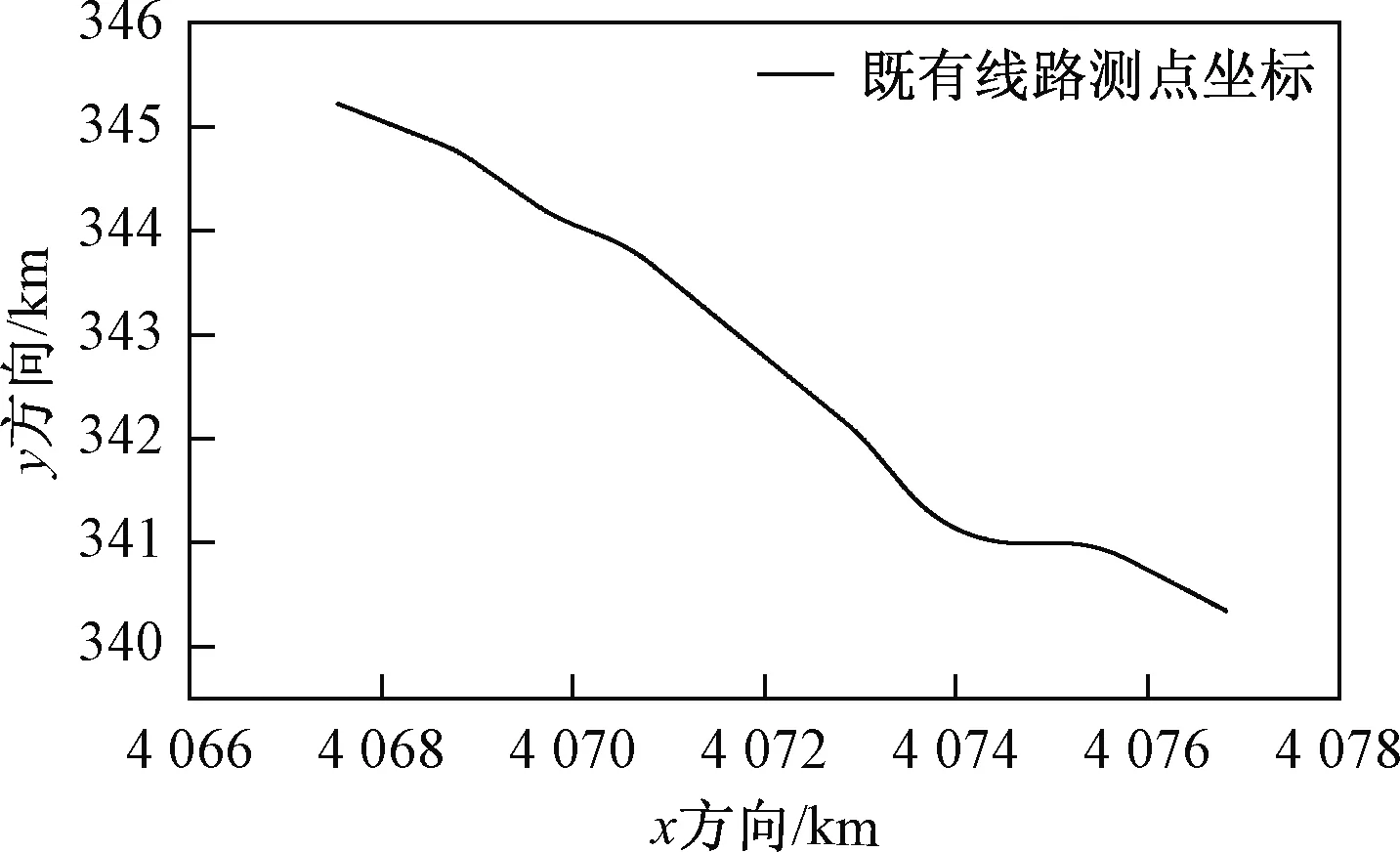
图7 既有线测点坐标示意图Fig.7 Sketch map of the existing curve of coordinate
按照蚁群算法迭代优化,最后得到的各迭代阶段的拨道量信息如表1所示。
从表1数据可以看出,以蚁群优化后最终得到的既有线拨道量更小从而更有利于降低线路维护成本,提高作业效率。

表1 既有线拨道量统计Table 1 Statistic of existing curve adjustment
将蚁群算法迭代优化拨道量和既有铁路整体整正优化的最小二乘法[26]、最小二乘拟合直线结合方向加速法优化曲线参数方法[27]、粒子群法[28]计算拨道量对比,如表2所示,蚁群算法优化能更好地满足工程需要,大幅度减少了拨道量值。

表2 既拨道量对比Table 2 Adjustment quantity comparison
图8为粒子群法、整体最小二乘法结合方向加速法、蚁群算法的拨道量对比,蚁群算法对整体线路的扰动最小,优化效果更优。

图8 既有线测点平面拨道量对比示意图Fig.8 Comparison sketch map of existing plane coordinate adjustment amount
5 结论
(1)在既有线路平面运用最小二乘法拟合的结果为蚁群优化初始参数方案,同时以最小二乘法拟合的线形计算拨道量为蚁群算法优化拨道量的初始参考值,保证了蚁群算法优化的可靠性。
(2)在平面运用方向加速法优化各曲线参数,加入基本约束惩罚项,保证了优化结果满足工程实际要求。
(3)利用蚁群算法优化既有线路平面整体与纵断面整体调整量,结合实例表明该方法在既有线路整正中具有可行性,从优化结果可以看出,蚁群算法平面优化大幅度降低了总体拨道量,整体线路拨道量平方和总值从14.81 m2下降到3.19 m2,优化效果明显。
猜你喜欢
北京航空航天大学学报(2020年3期)2021-01-14
学生导报·东方少年(2019年7期)2019-06-11
农业与技术(2018年18期)2018-12-18
现代计算机(2018年16期)2018-07-06
数学学习与研究(2017年11期)2017-06-20
青年时代(2017年3期)2017-02-17
现代企业文化·理论版(2016年17期)2016-11-29
湖南师范大学学报·自然科学版(2015年5期)2015-10-20
理科考试研究·高中(2014年3期)2014-04-10
国际贸易(2014年2期)2014-01-10