
Civil unmanned aircraft system operation in national airspace: A survey from Air Navigation Service Provider perspective
2021-04-06 02:15ZhoxunLIUKiqunCAIYnboZHU
CHINESE JOURNAL OF AERONAUTICS 2021年3期
Zhoxun LIU, Kiqun CAI,*, Ynbo ZHU,b
a School of Electronics and Information Engineering, Beihang University, Beijing 100083, China b Aviation Data Communication Corporation, Beijing 100083, China
KEYWORDS Air Navigation Service Provider;Airspace Organization and Management;Air Traffic Control;Air Traffic Management;Air traffic service provision;Unmanned Aircraft System;UAS Traffic Management
Abstract Unmanned Aircraft Systems (UASs) have advanced technologically and surged exponentially over recent years.Currently,due to safety concerns,most civil operations of UAS are conducted in low-level uncontrolled area or in segregated controlled airspace. As the industry progresses, both operational and technological capabilities have matured to the point where UASs are expected to gain greater freedom of access to both controlled and uncontrolled airspace.Extensive technical and regulatory surveys have been conducted to enable the expanded operations.However, most surveys are derived from the perspective of UAS own operating mechanism and barely consider interactions of their non-segregated activities with the Air Traffic Management(ATM)system.Hence,to fill the gap,this paper presents a survey conducted from the perspective of Air Navigation Service Provider (ANSP), which serves to accommodate these new entrants to the overall national airspace while continuing flight safety and efficiency.The primary objectives of this paper are to: (A) describe what typical ANSP-supplied UAS Traffic Management (UTM) architecture is required to facilitate all types of civil UAS operations; (B) identify three major ANSP considerations on how UAS can be accommodated safely in civil airspace; (C) outline future directions and challenges related with UAS operations for the ANSP.
1. Introduction
Unmanned Aircraft Systems (UASs), also termed as drones,Unmanned Aerial Vehicles (UAVs), have traditionally been employed in military usage such as reconnaissance and surveillance.The past decades have seen the rapid emergence of UAS as a resource for expansive civilian applications, including but not limited to infrastructure monitoring,aerial remote sensing,logistics industry, search and rescue, etc. According to the latest professional civil UAS market outlook, worldwide shipment is forecast to rise at a compound annual growth rate of 4.5% and reach 2.91 million units by 2023, an increase of almost 20% from 2019.1The top three largest markets for commercial UASs are North America (32.3%), Asia Pacific(29.1%), and Europe (23.3%), attributed to growing regulatory and development supports in these regions. Although most flights conducted by UASs today have taken place in uncontrolled airspace or segregated airspace to obviate danger to other airspace users, Air Navigation Service Provider(ANSP), which provides and oversees a highly organized set of procedures and services to assure safe flight,has anticipated future non-segregated UAS operations, including those that are fully contained in either controlled or uncontrolled airspace and those that transit across the boundaries.2However,the absence of a pilot on-board the aircraft has brought the concern of matching the ability of human pilot to see and avoid other traffic and manage dangerous situations, which makes civil UAS operations into non-segregated airspace only to be authorized on a case-by-case basis.3To enable UASs being operated on a regular basis as an integral part of the aviation system, it is important to develop technical solutions,formulate regulatory frameworks and design management systems so that UAS can conduct operations safely, both to the air and to the ground.
With regard to the management system, given the anticipated large amounts of UAS traffic and widely varying performance characteristics (e.g., mobility, equipage profile,trajectory pattern), it is far beyond the capabilities of conventional Air Traffic Management (ATM) system to deliver services for UASs in a cost-effective manner.4In addition,present ATM framework is mainly established for manned aircraft while the absence of a pilot on-board will pose a unique set of management issues (e.g., replicating capabilities to see and avoid hazards,the latency and vulnerability of UAS Command and Control (C2) link) not seen in manned aircraft operations.
Hence, to enable safe, economical and efficient management of UAS traffic, a reasonable choice would be to design the UAS Traffic Management (UTM) system as a subset of the ANSP-supplied ATM system.At present,the driving bodies behind the world’s three most strategically significant next generation ATM research programs, i.e., USA’s NextGen,European Union’s SESAR Joint Undertaking (SJU) and Japan’s Collaborative Action for Renovation of Air Transport Systems (CARATS) projects, have developed the most advanced top-down concepts and detailed roadmaps for the implementation of their UTM systems.5-7Such a system should be able to accommodate varied UAS and operations,including Remotely Piloted Aircraft Systems(RPASs)that will eventually fly into the upper controlled airspace as well as other UASs(e.g.,Vertical Take-Off and Landing(VTOL)aircraft intended for air mobility) that fly mostly over the populated urban area.
Considering that increasing demands for UAS operations are currently at low altitudes, typically small UAS (sUAS) in uncontrolled airspace, many States have taken active steps to set and refine the UTM Concept of Operations (ConOps) for low-level UAS operations below 400 ft (1 ft=0.3048 m)AGL. Since no Air Traffic Control (ATC) services are provided in the uncontrolled airspace, UAS interactions with ANSP are required in the context of UTM system as the number of UAS operations increases. These interactions are enabled through the provision of facilities and a collection of services in accordance with the flight operation levels, ranging from less-populated areas to populated areas,from Visual Line of Sight (VLOS) operations to Beyond Visual Line of Sight(BLOS) operations. The referenced official documents include at least (but not limited to) the following Table 1.
Furthermore, as the usage of UAS operations expands,particularly the category referred to as RPAS, UAS operations will go beyond the low-level and reach in all classes of airspace in the foreseeable future. These larger and more complex certified systems are capable of high-level flight in controlled airspace and interacting with ANSP in a manner similar to traditional manned aircraft, i.e., in the ATM context. Therefore, given the need to integrate UAS into the general air traffic, especially those within controlled airspace,States are encouraged to develop an enabling framework for UTM that targets specifically interface with the ATC unit and the wider ATM system. The referenced official documents include at least (but not limited to) the following Table 2.
In addition to the above undergoing national practices,the research community has also conducted extensive studies to provide guidance for UAS safe operations from either technological or regulatory side. Summaries of these efforts include but not limited to the following reviews. In the technical domain, Stansbury et al. present a survey of UAS Command,Control and Communication(C3)technologies,8while Yu and Zhang summarize the Sense and Avoid (SAA) technology development and implementation in the sequence of sensing,decision making, path planning and path following.9Meanwhile, a classification of UAS Conflict Detection and Resolution (CD&R) methods is proposed by Jenie et al. according to means of surveillance, coordination, maneuvering, and autonomy.10In the regulatory domain,an overview of existing UAS regulations in the US is given by Dalamagkidis et al.11while Sto¨cker et al. provide a research synthesis on the globalscale where similarities and variations in various national regulation frameworks are explored.12
Table 1 Overview of official UTM documents for lowaltitude uncontrolled UAS operations.
Table 2 Overview of official UTM documents that integrate controlled UAS operations into ATM system.
However, so far there is little survey conducted from the operational side on how UAS operations can be facilitated by the UTM system in both uncontrolled and controlled airspace environment. In addition, what generic procedures and possible interfaces a typical UTM system should develop are continued to be detailed as needed to scale to a broad spectrum of UAS operation categories.Therefore,having considered relevant materials, this paper has proposed an overall high-level UTM architecture, as illustrated in Fig. 1, with interfaces and interactions among multiple stakeholders highlighted. It is noteworthy that the framework considers all types of UAS operations (VLOS, VTOL, BVLOS) and covers not only the needs of smaller UAS but also RPAS and beyond.
As depicted in Fig. 1, the UTM architecture serves to enable cooperative management of UAS operations and shared situational awareness between stakeholders involved in implementing UTM, facilitated by ANSP-supplied data exchange.The system can be considered as a collection of services that work together to make the complete functionality and is responsible for distinct levels of service provision during different phases of flight. In particular, UAS services will be gradually introduced over three phases, i.e., foundation services, initial services and advanced services, depending on the level of operational complexity and the operational risk category. For instance, most basic sUAS operations (e.g., photo activity in non-populated countryside)are covered in the foundation services.A majority of professional uses of UAS flights and part of RPAS flights can be achieved with initial services(e.g., state inspection in areas where an airport is not far).More complex interactions caused by mixing manned aviation with RPAS in controlled airspace are enabled by advanced services, which also allow dense and automatic flight operations(e.g., taxi-UAS overflying urban populated area). Fig. 2 describes the detailed three service phases that are applicable to UAS operations.6It should be noted that services provided in a given phase may utilize other services in that phase,as well as services already provided in previous phases.

Fig. 1 Functional elements and flow of information of a general UTM architecture.
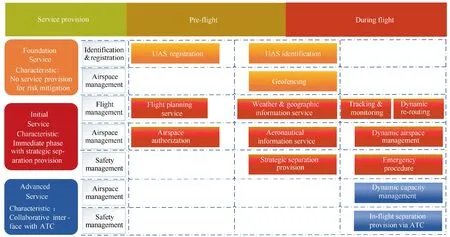
Fig. 2 List of UAS operation services in a UTM context.6
In principle, the goal of safely managing UAS traffic is subject to a combination of essential services and control procedures,which requires ANSP to consider when accommodating their operations in the overall national airspace.Hence,the motivation behind this paper is to assist in the development and management of UAS operations for civil use, especially those larger, more capable RPASs operating in controlled airspace.
Specifically,if UASs are to operate in the national airspace environment, they must comply with risk mitigation procedures so as to achieve the overall equivalent level of safety of existing flight operations.Therefore,most UAS management concepts have followed the idea of safety layer establishment in manned traffic system,13that is, viewed from the ANSP perspective, each safety layer valid for the ATM community should have its equivalent in the UTM system. A three-layered safety net (strategic control, ATC separation and onboard SAA capability) in ATM14is then mirrored in UAS operation management. Further, by extending the established safety net to their upper directories, this survey covers three major UAS operation foundations, as illustrated in Fig. 3, i.e., Airspace Organization and Management(AOM), Air Traffic Services (ATS) Provision and enabling technologies for UAS-ANSP interaction.Essential ANSP considerations associated with UAS operations under UTM context thus can be abstracted into those three blocks, as they represent the operating environment, the coordination between UAS activities and flying environment, and the required onboard systems, respectively.
A brief description of these three major ANSP considerations is represented as follows:
(1) AOM. Airspace as the fundamental infrastructure in ATM is heavily regulated. Since UASs come in various shapes and sizes with diverse capabilities,their air activities can range from rural to urban areas and from lowaltitude to high-altitude airspace. Within AOM, a reasonable airspace structure will reduce the need for separation provision to a designated level,serving as the first line in the three-layered safety net. Specifically, this paper highlights three main aspects, namely airspace structure and organization, dynamic airspace adjustment, and geofence management.
(2) ATS Provision. Safety-critical air traffic services are assistances to airspace users for operating their flights.This paper targets especially enhanced coordination of UAS operations within controlled airspace where ATC is responsible for the integral ATS provision during UAS flight executions. Besides essential services for regular operations(e.g.,separation assurance,which serves as the second line in the three-layered safety net), emergency response procedures for in-flight failures are also included.
(3) Enabling technologies. Supporting technologies are emerging to augment not only the reliability and safety of UAS flight operations, but also the seamless ANSP services during the air-ground and air-air interaction.Among multiple contributing factors, the C2 link and SAA system are the most critical parts in UAS advanced operations, since the former is the only connection between the pilot and the UAS flight control system and the latter is the last resort of the three-layered safety net. A thorough technical analysis of these two key enablers has been particularly presented.
The rest of this paper is devoted to the exposition of the three ANSP considerations mentioned above. Section 2 discusses the integration of UASs in the existing airspace system in terms of airspace design and management. Section 3 presents an overview of key ATS provided by ANSP that are essential for both normal and off-nominal UAS operations.Section 4 describes two typical technological enablers that are integral during the UAS-ANSP interaction. Future research challenges and directions are pointed out in Section 5 while a summary is provided in Section 6.
2. Airspace organization and management for UAS civil operations
As already stated in the introduction, Airspace Organization and Management (AOM) is intended to enable and safely manage the extensive use of airspace. The airspace structure itself forms a strategic risk mitigation mechanism.With UASs expanding their applications throughout all airspace, the airspace management system for UTM is built to facilitate diverse UAS operations in all categories of airspace: in the medium term in uncontrolled airspace and, in the long term, also in controlled airspace. Therefore, to integrate UAS air activities into the airspace functional configuration, while giving special emphasis on urban airspace, this section focuses on the core functionalities of airspace design and allocation,15i.e.,airspace structure and organization, dynamic airspace adjustment, and geofence management.
In the rest of the section, a variety of UAS types and corresponding UAS-oriented airspace management are introduced in detail. Specifically, considering that the current integration concept mainly focuses on the integration of UASs into low-altitude uncontrolled airspace, reference in this area takes up a greater part of the section.
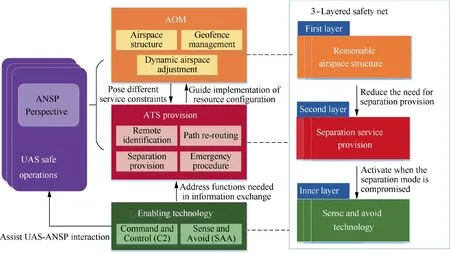
Fig. 3 Three major areas central to UAS safe operations from ANSP perspective.
2.1. UAS types and airspace usage
Diverse systems are available on the UAS market and there is no universal classification up to now.16Generally, the classification of UAS for civil uses tends to follow the existing military descriptions of platforms based upon characteristics that include not only range and altitude but also Size, Weight and Power (SWAP).17Table 3 shows the relation between UAS types and corresponding airspace usage.
Access to airspace should be granted provided that the specific type of UAS is capable of complying with safetysignificant standards,equipment requirements(e.g.,navigation capability and other performance capabilities) and established operating procedures (including normal and off-nominal processes) defined in its intended class of airspace of operation.For instance, for sUASs that operate in low-altitude uncontrolled airspace, typically below 400 ft, no particular requirements such as SAA systems, transponder and two-way ATC communication are required,18while for larger UASs that operate in controlled airspace alongside airliners, the above requirements are mandatory.
2.2. Airspace structure and organization
In current operations,airspace is organized in adjacent sectors,each of which has its own specificity in terms of shape, available routes, fixes, traffic patterns, etc. To cater for the introduction of high volume UAS operations, especially public and commercial needs of UAS activities in urban areas, specific UAS airspace structures are designated to make this feasible.
Unlike high-altitude controlled airspace with few obstacles,low-altitude and urban airspace is highly complex and is very likely to be intruded by existing structures. High population density and vigorous ground environment(e.g., buildings, terrain) make the available airspace more restricted and as a result, provide additional challenges to the airspace design.
As civil low-altitude UAS operations in dense urban environment are increasingly raised, an airspace system that can safely integrate and organize the large-scale UAS traffic in such limited space is required.In this context,two remarkable research programs that center on designs of airspace use for urban UAS traffic:the Metropolis project funded by European Commission, and the Traffic Management for UAS (TMUAS) in Singapore have both provided crucial insights in UAS airspace structural design.19,20
In general, four airspace design options, i.e., full mix/free flight, layers, zones/sectors, and tubes/corridors have been developed,differing in terms of structural complexity and control involved.The level of structure is gradually increased from a completely unstructured concept, layers, zones to a highly structured tube network.The degree of freedom is correspondingly decreased from four(i.e.,x position,y position,altitude,speed), three (i.e., x position, y position, speed), two (i.e., altitude, speed) to zero. The conceptual designs of the four options as well as application scenarios where certain option can be implemented are presented in Fig. 4.19In accordance with the expected traffic pattern, the full mix structure is intended for unstructured traffic demand (i.e., door-to-door principle). Vertical bands are assigned in the layer option based on the direction of flight, which is an extension of the hemispheric rule. Zones are designed for homogeneous traffic according to the layout of the city while corridor as a fixed dense route structure requires increased predictability of traffic flows.
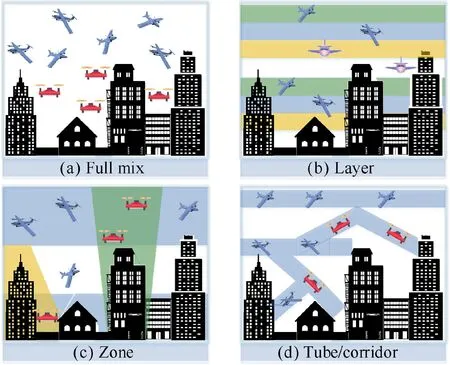
Fig. 4 Four design options with increasing degree of structure and scenarios applicable for the designed concepts.19
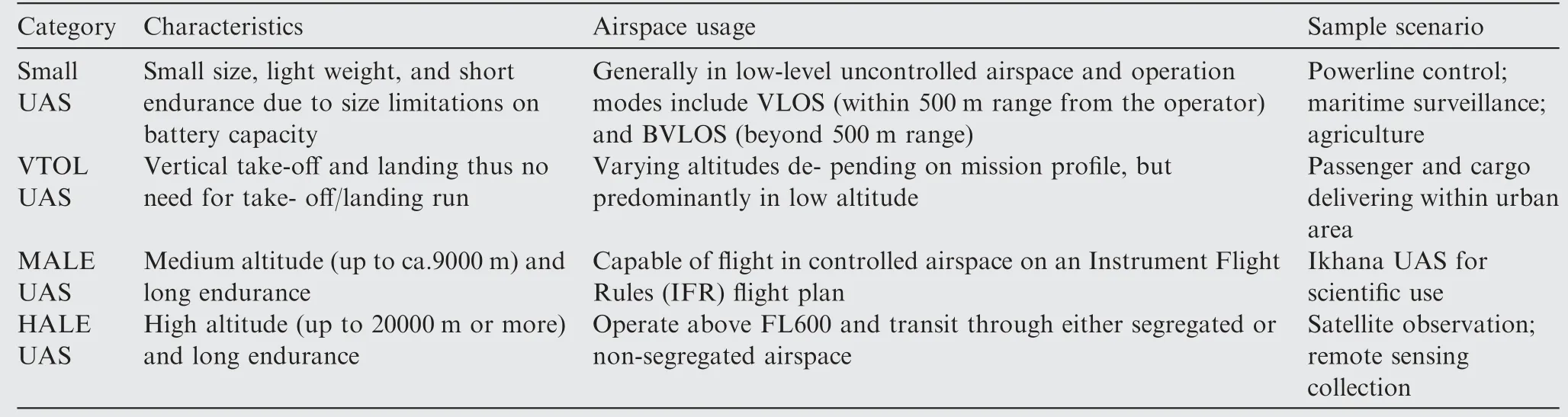
Table 3 A generally accepted UAS classification in civilian airspace (from very low level to very high level).
Considering that airspace can be better managed with the capacity of airspace in each airspace structure being established, researchers in the Metropolis project have done both nominal and off-nominal (e.g., uncertainties caused by wind) experiments to investigate the structure-capacity relationship.21-23Results show that the moderately structured layers option has the best overall performance in capacity, safety and efficiency in the high-density traffic scenario and also has higher robustness to off-nominal events than the other three.21The research team also conducts a complexity analysis on how these airspace designs influence the complexity of the resulting traffic situation.22Simulations in the urban airspace of Paris show that the tubes option performs equally good as layers and full mix on lower traffic densities while its performance is the best for high traffic volumes. The traffic complexity inside tubes,which is measured by proximity and convergence,tends to be less influenced by the traffic density increase compared to other options.
Besides the capacity and complexity comparative analysis of these four developed options, various works focus on how one certain type of structure should be optimized to function better in actual application. The list of research focuses include:influence of design parameters on the structure utilization, for example, UAS separation requirement and segments geometry, and structural elements construction and visualization. A summarization of the main contributions of related works is given in Table 4.20,24-32
To ensure the safe and optimal operation of UASs, structured airspace is organized, regardless of the specific design option adopted,for flight condition establishment conforming to the requirements. A fundamental part of UAS airspace organization is thus to determine where UASs may be authorized to operate safely and how the usable/flyable airspace is represented. Such informational guidance is commonly enabled by the usage of a grid-based representation method,which divides airspace into a regular array of grid cells. Grid cells of specified size (e.g., 1×1, roughly 1 n mile×n mile(1 n mile=1.852 km))grid in FAA low-altitude UAS facility map)33are colored and combined systematically to depict available areas and maximum altitudes UASs ought to adhere to. One of the latest researches on UAS safety near airports conducts a quantitative risk analysis on UAS grid altitude limit setting, with real data taken from the airspace grid map.34Furthermore,the grid-based description method is also a kind of means of helping with preparation for further UAS traffic flow control. Since aircraft trajectories are stored in the appropriate grid cells,the grid size can be modified according to the space and time to be occupied by UASs.Each grid is then declared to be either open or closed to other UAS operations depending on the suitability of the grid or that there are already excessive UASs within the grid.20Thus,the operating environment can be displayed and UASs are allowed to fly through the most efficient area as safely as possible.
2.3. Dynamic airspace adjustment
The created airspace structure is not rigidly defined but has great flexibility in management, particularly in reaction to dynamic demand patterns and agent needs. In principle,dynamic airspace adjustments aim to change airspace configuration over time to better accommodate UAS traffic behaviors while also satisfy the constraints of weather and traffic congestions.
Take corridors as an example for illustration,the beginning and ending time, the centerline and size of corridors will vary with time according to the change of traffic patterns,wind and aircraft profiles.35,36The reason for this is that,as aircraft preferred routes change due to wind or severe weather, which iscommon since meteorological factors such as wind field may change frequently,airspace configuration needs to change with major flows to avoid additional demand-capacity imbalances.Hence,many scientific literatures in airspace dynamic management domain have focused on how to ensure traffic throughput capability to the fullest extent possible, while concepts such as dynamic demand-capacity balancing target such problem.
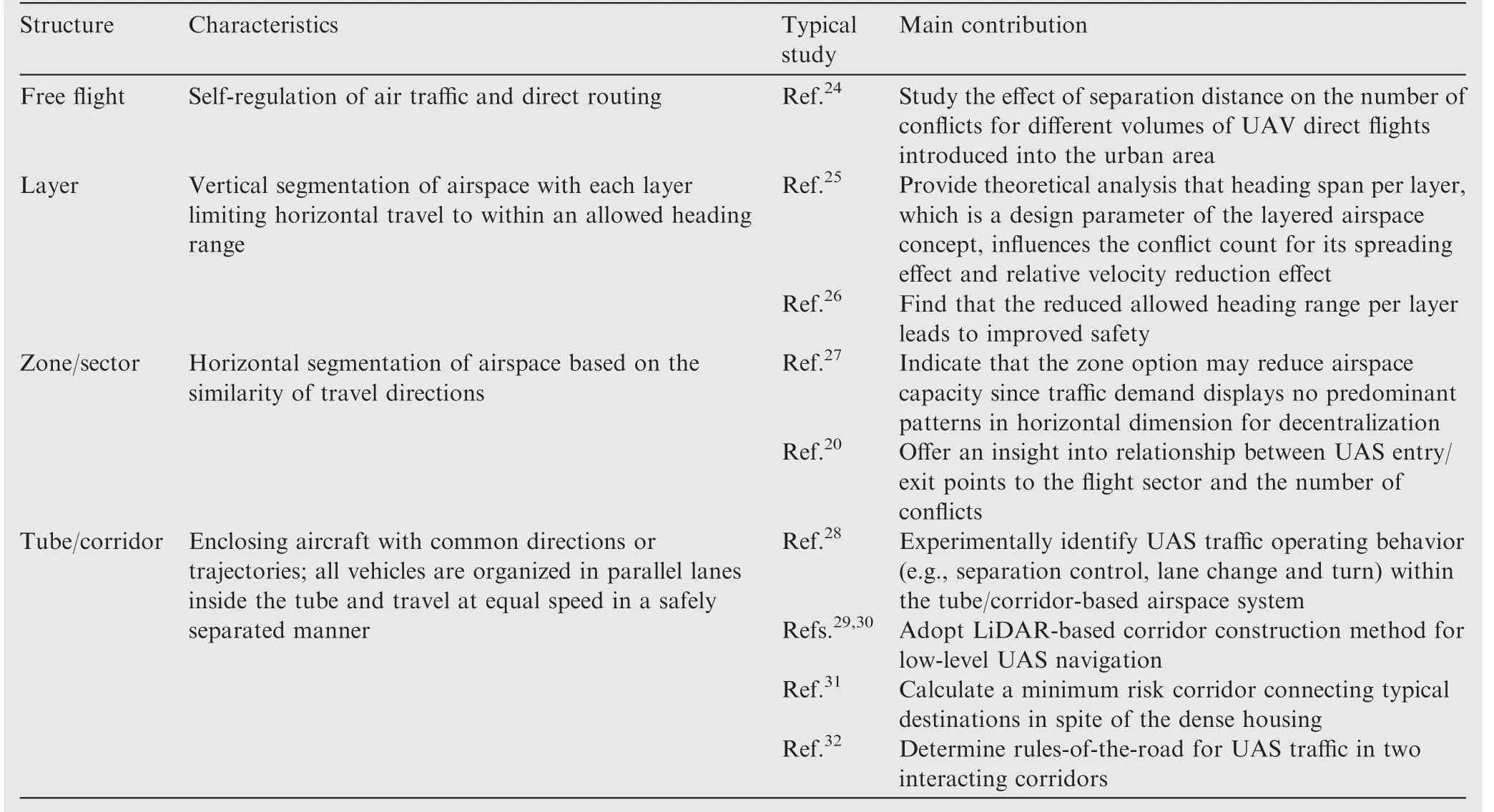
Table 4 Summary of research works related with four airspace structure utilization.
Existing scholarly research on the UAS-centered airspace demand-capacity balancing is relatively thin thus strategies from manned aviation might be adapted for reference.Researches in demand-capacity balancing generally fall into two categories. The first is to address the imbalance from the demand side.Primary means available for demand regulations include traffic flow restrictions like miles-in-trail (or minutesin-trail)37and re-routing.38,39Given real-time airspace constraint data, spatial or temporal restrictions are imposed on aircraft to determine whether environmental conditions are suitable for flights in the intended locations at the scheduled time. Generally, traffic flow restrictive measures are made by modifying the departure times and trajectories of flights,either by assigning departure delay,40airborne holding delay41or various other control actions,42including re-routing, flight cancellation, speed control, etc. The second is to manage the capacity side to provide highly flexible airspace via decision support tools, particularly during weather impacted days and periods of high volume and complexity.43,44In a centrally controlled airspace, dynamic allocation of capacity has been actively researched, the main purpose of which is to optimize sector boundary. Since the maximum number of traffic limit is primarily governed by the ATC’s workload, dynamic airspace sectorization enables that controller within the sector is not overloaded.Considering that airspace structure can be represented as a weighted graph, works to date mainly resort to graph partitioning techniques to minimize a workload cost and a transition cost,where the bounded workload, minimum distance requirement,connectivity and convexity of sectors are set as soft constraints. A detailed discussion can be found in a recent paper45and references there in.
When studying the dynamic airspace adjustment for UAS operations in low-altitude airspace, there are basically two important aspects: when to trigger airspace change and how to redesign. As demand profile for UAS to operate in urban airspace varies dynamically, a density-based dynamic airspace management concept is proposed by the Netherlands Aerospace Centre,where much freedom is allowed for UAS operations at low density,but little at high density.46That is,density constraints are imposed to airspace cells given the risks involved in UASs flying within the airspace.With the decreasing degree of freedom of UAS and increasing density,airspace becomes more structured and the increased structure will potentially lead to decreased availability of the airspace. Similarly,an Adaptive Urban Airspace(AdUrA)concept is raised by the TM-UAS team in Singapore.47Multiple airspace configurations are managed adaptively given the varying degree of freedom of UASs.Specifically,dynamic airspace phase transition between three types of UAS routing networks, namely:route network in AirMatrix, over buildings, and over roads,are modeled and simulated for UAS delivery missions. The transition threshold is also introduced in the research group’s another work that deals with the maximum possible entry points of one certain sector,before a more structured airspace design is required based on the density.20Besides the densitybased airspace management concept that commonly deals with urban regular UAS traffic, a UAS Volume Reservations(UVRs) concept (previously referred to as dynamic restrictions) is established in the newly released UTM ConOps V2.0 for UAS priority operation.5A dynamically generated UVR limits temporary access of non-critical UAS operations to a block of airspace (generally short in duration and small in size) until it is released according to the time-window reservation. Specifically, the concept test is conducted by NASA’s UTM team where UVRs are either established in advance to serve as a static structure within the airspace or activated when UAS operations are already underway.48
2.4. Geofence management
At the UAS individual level, airspace management is referred to as geo-fencing. By constraining UAS movements to or out of the designated airspace (e.g., prohibited or restricted airspace) with virtual boundaries, assurance in UAS risk control in AOM is predominantly provided through the use of geofence.49Based on its purpose,a geofence can be categorized into two types: keep-in and keep-out. The former confines UAS operations to the specified flight volume while the latter defines a protection boundary that UAS shall not violate(e.g.,exclusion zones around airports). Previous geofencing studies normally involve the following three logic units, i.e., geofence boundary configuration, navigation within the limits, and identification of impending violation.
Geofence boundary is drawn to confine UAS movements in accordance with the spatio-temporal limitations and vehicle performances.50The boundary can be circle, polygon, etc.51According to a formalized definition, the boundary is defined relative to one or more home locations, consisting of the minimum and maximum vertical altitudes and a list of n horizontal vertices v=[(x1,y1),(x2,y2),...,(xn,yn)].52A closed shape is drawn between these horizontal vertices and is extruded to the vertical limits. The ith home location is defined as hi=(φi,λi,zi,ti), which denotes the latitude, longitude, altitude, and activation time of i, respectively. Based on geofence permanence(static or dynamic),the boundary remains fixed or changes through space over time due to special needs.
Given defined geofence boundaries, UASs must navigate within the limits. In terms of the proximity of UASs to geolimits, a three-layered concept of protection is raised by NASA’s Safeguard system,53as shown in Fig. 5. The desired proximity to a terminate boundary denoted by ρεchanges dynamically with respect to actual needs, where ε is the maximum distance a UAS could travel if flight termination is initiated. To predict breaches of the defined limits, a combination of geofencing hardware and software is implemented into UAS by incorporating positioning technologies (i.e. Wi-Fi, GPS,cellular data,geomagnetic and Bluetooth beacons)and autopilot software. As UAS flies, the geofencing system could provide geo-awareness by continually computing the distance between the vehicle and airspace limits.
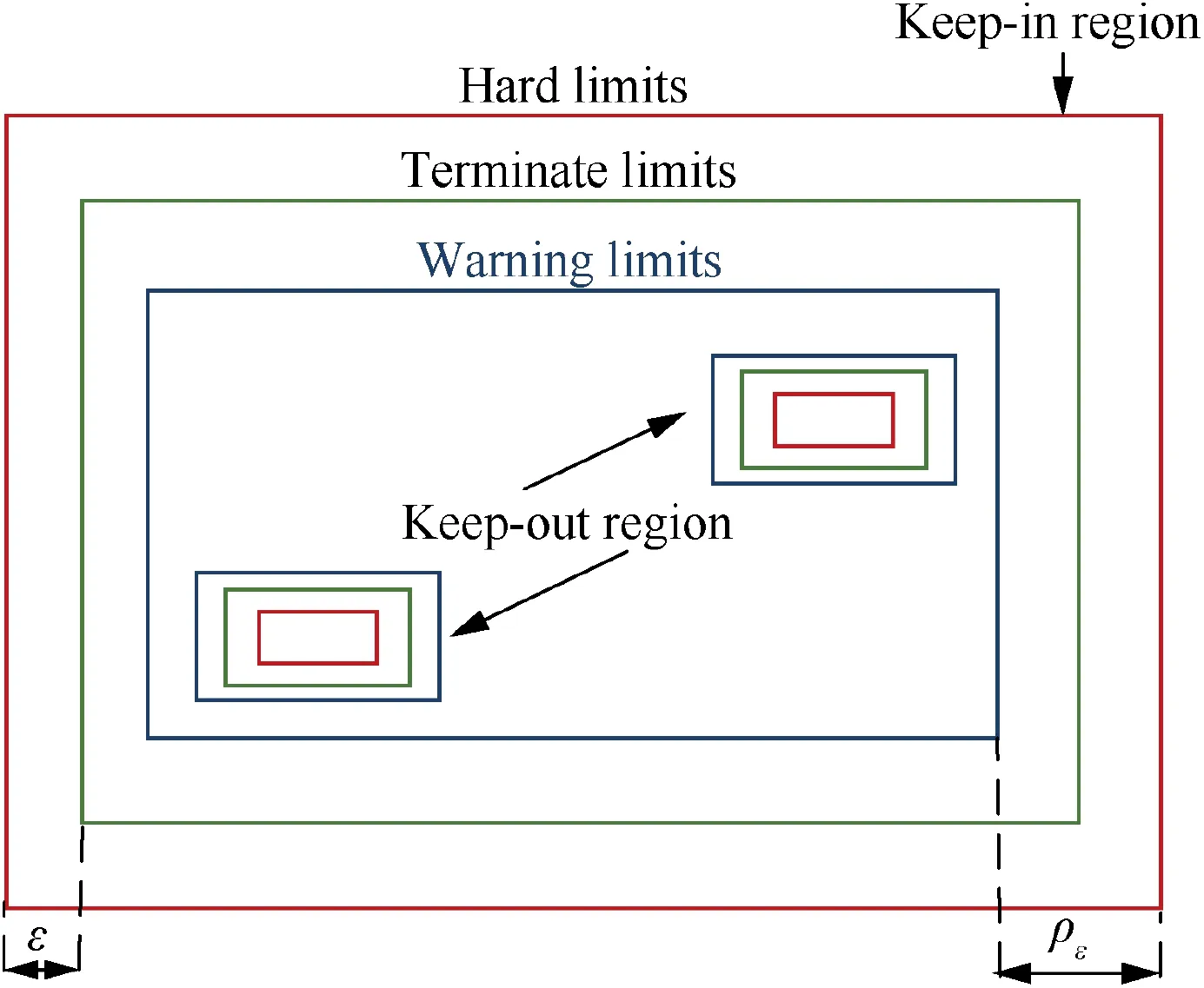
Fig. 5 3-layered geofence in NASA Safeguard.53
A geofence intrusion happens when the UAS moves out of a keep-in geofence or into the keep-out geofence. Several detection algorithms have been verified to determine whether the boundary is violated.Compared with the polygon geofencing,circular geofencing is much easier in terms of implementation.If the distance between the current UAS position and the center is greater than the radius, then the UAS crosses the boundary, and if not, the UAS is inside the boundary. For the complex types of polygons,however,it is difficult to determine whether the UAS is in or out of the boundary. This point-in-polygon issue can also be considered as a special case of the point location problem, which has been generally researched in computer graphics and computer version.Representative methods available for the solution include grid approach,ray casting,sum of area approach,swath approach,sign of offset approach, orientation approach, and wedge method, about which there is a detailed principle introduction and complexity comparison.54Specifically, two point-inpolygon methods,ray casting and triangle weight characterization, are actually used in the detection of geofence boundary violation.55,56After the identified violation, certain violation response will be induced including but not limited to sound or message alert, power cut, etc.
Apart from the above preventative procedures, Counter-UAS (C-UAS) measures are initiated to avoid further safety risks posed by illegal UASs continuing to violate the geofencing area (e.g., close encounters with manned aircraft in approach zones). C-UAS technology contains two primary parts, a detection component and an interdiction component for defense actions. Main techniques for detecting and intercepting together with their pros and cons are listed in Tables 5 and 6, respectively. Michel reports 230C-UAS products currently available in markets that employ these techniques.57
3. Essential ATS provided in UAS-ANSP coordination
As illustrated in Section 2, AOM itself forms a procedural safety management mechanism for a prior separation and organization of UAS traffic.Further on,surveillance and control of air traffic by ANSP,which remains the responsibility of the ATC controller within controlled airspace, serves as the second safety layer.
At the tactical level, traffic services should be flexible enough to properly react to flight conditions created at the strategic level. Take ATC-supported ATS for illustration.For large UASs operating in en-route controlled airspace,the two-way communications between UAS and ATC enable ATC to supply UAS with essential ATS so that UAS pilots have complete awareness of airspace and optimize their operations.58It is noteworthy that ATS are provided under the UAS-ANSP coordination context, which is illustrated in Fig. 6. As the authorized UAS requests real-time information related to its fight plan, service provider (represented by ATC in the following context)will continuously assess weather, airspace, traffic, and other information to implement services both for the routine operation and in-flight emergency.
In this section, four detailed procedures of ATS provision,i.e., UAS remote identification and tracking, path re-routing,separation assurance and emergency procedure are discussed.The former three services are to support nominal operations whereas the last one is to accommodate flight emergencies.For each service, we first outline the key challenges, and then discuss the state of the art,while also providing an overview on recent results.

Table 5 An overview of C-UAS detection techniques.

Table 6 An overview of C-UAS interdiction techniques.
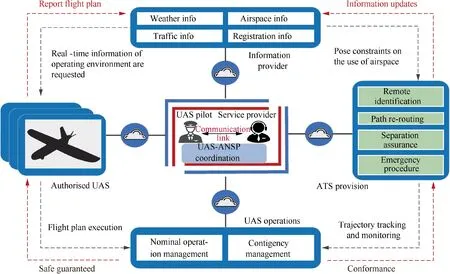
Fig. 6 Essential ATS provided through UAS-ANSP coordination process.
3.1. UAS remote identification and tracking
3.1.1. Challenges
UAS remote identification (ID) and tracking is a concept of provision that enables service suppliers to identify and track UAS during its operation, serving as the foundation for UAS full integration in controlled airspace. Factors that need to be considered include both technical and operational capabilities.First of all,to provide identifying information in flight(e.g. ID and position, control station location, intents), UASs should be equipped with ID and tracking devices available to communicate the message.59Also, compared with traditional manned aviation, developing ID and tracking technologies for UAS are more complex. The integrated or external ID device attached to UASs should interoperate with the ATC automation while under inherent constraints(e.g.size, weight,power consumption) of the UAS as well.60Moreover, despite the fact that UAS pilots may be remote from the vehicle and ATC, the lowest latency possible from UAS position report to ATC ground system is anticipated to ensure the use of tracking information in tactical ATC environment.61Other associated issues include upload rate, range, accuracy, spectrum usage, etc.62
Therefore, implementing remote ID and tracking service needs comprehensive considerations in various aspects, and is clearly challenging.
3.1.2. State of art
A number of recent studies on remote ID and tracking are discussed in this part. Previous efforts in generating consensus around remote ID are made by UAS Identification and Tracking Aviation Rulemaking Committee (ARC), leading to its report on ideas about how remote ID might work and what operational performance criteria (e.g., upload rate, latency,range) the viable remote ID solution should fulfill.63A system design for UAS identification and tracking is proposed in Denmark, which supports communication between the UAS and the traffic management system via either a local beacon signal or a radio network infrastructure.64In particular, three UAS remote ID approaches including Automatic Dependent Surveillance-Broadcast (ADS-B), secure integrated C2 and infrared light beacons are tested and compared.65Through remote tracking and identification of UAS, tracking data during all phases of flight is utilized to monitor UAS’s conformance to the operation volume specified in its original operation plan. For accurate and efficient tracking of UAS,data fusion approaches66drawn from artificial intelligence(e.g., neural network) and statistical estimation (e.g., Kalman filter)are commonly employed to incorporate multiple sources of state information for the same flight, including automatic position reports from cooperative remote ID device (e.g.,ADS-B)as well as plots from non-cooperative surveillance system(e.g.,radar).A particular UAS tracking function is developed by Campan˜a et al.where two Bayesian filters,an adapted Bayesian tracker using both UAS flight plan and telemetry information, and a robust Bayesian tracker only using the telemetry information, are implemented to track UASs simultaneously.67The output track is determined by the adapted Bayesian tracker in cases where there remains a correlation between the telemetry information sent from the UAS and the flight segment of the flight plan, otherwise, the robust Bayesian tracker would be chosen. Furthermore, since ADSB is adopted as a fair standard on civilian aircraft and is mandatory for all aircraft in integrated airspace by 2020,there have been tracking assessments on positional data integrity when using ADS-B system integrated with UAS68and message loss rate, channel quality, tracking error, etc.69
3.1.3. Representative result
One of the most acknowledged and comprehensive technology reports for UAS ID and tracking is presented by ARC63and thus, we explain it in more detail. Two methods are recommended for UAS remote ID and tracking information provision: the direct broadcast method and the networked method.Direct broadcast means to transmit data collected from the UAS itself to ATC station within the broadcast range. Broadcast protocols include ADS-B,RF based protocols,integrated C2, and others. In contrast, the networked method involves transmitting data to an internet-based service which allows ATC to access the data to acquire ID and tracking information. Networked cellular and satellite are typical transmit means via which information can be published.70Fig. 7 gives an illustration of the working principles of direct broadcast and networked publishing.
3.2. Path re-routing
3.2.1. Challenges
For highly regulated airspace, one essential service needed is dynamic UAS path re-routing according to the continuously updated environmental information (i.e. weather, airspace and traffic). UAS will be guided to re-route its path since the pre-planned flight path may be outdated or dangerous in flight.Unfortunately, the optimal UAS flight path generation is rather challenging in general. On the one hand, an infinite number of variables are involved in the determination of the continuous UAS trajectory. On the other hand, the problem is usually multi-objective (e.g., optimal in terms of time70and path length,71control efforts,72and mission accomplishment73) while at the same time subject to a limited set of constraints (e.g., obstacle avoidance,71vehicle dynamics72,73and adverse weather74).
Specifically,the optimal UAS path re-routing is complex as it should seek a balance between the computational complexity and practical limitations in problem modeling.75In addition,unlike offline path pre-planning under static environment with deterministic information,76processing various time-variant factors all at once, (e.g., present and future aircraft states,77airspace restrictions78and meteorological forecasts79),becomes more challenging when their uncertainties are taken into account.
Next, a survey of the related works on UAS re-routing problem formulation, algorithm adoption, as well as uncertainty and computational complexity management will be presented.
3.2.2. State of art
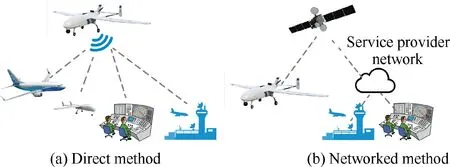
Fig. 7 Characteristics of two remote ID and tracking methods:Direct broadcast vs network publishing.
From the perspective of path generation mechanisms,the UAS path re-routing problem can be formulated as either an optimal control problem or a graph search problem. The fundamental idea of the former is to characterize UAS dynamics by a discrete-time state space, with the state vector generally consisting of the position and velocity of UAS in 3D space.The problem can be solved by applying control-based methods such as Hamilton-Jacobi-Bellman (HJB) and nonlinear programming to produce a trajectory composed of a sequence of states under certain objective and transition constraint.80One main advantage of the optimal control formulation is that kinematic models of UAS are utilized in trajectory deployment, and thus the trajectory should more closely resemble reality.However,the discretization process may require a huge motion library.81In contrast, the latter takes dynamic geometry information of obstacles in the graph as the inputs and reduces the UAS to a point in the configuration space, with the optimal path connecting an ordered pair of nodes of the graph. The problem can be solved by geometry search based methods such as deterministic and stochastic search algorithms for simplicity and small computational load.82However, the main drawback of the graph search formulation resides in the lack of correlation between the UAS kinematics and the generated path, thus requiring a smoothing procedure to ensure that dynamic constraints are fit.83In conclusion, planning in the state space often contains the control law of the re-planned path while planning based on geometry search is computationally more efficient. Meanwhile, the path rerouting problem in general deals with finding the feasible path with optimal objective function while respecting practical constraints.84Hence,the problem can also be formulated as a constrained optimization problem, which can be solved with the help of widely used optimization framework. From the perspective of optimization, different optimization modelings as well as adopted algorithms in the literature are conveniently summarized in Table 7.70-75,77,84-95
3.2.3. Representative result
An important capability needed to re-route UAS under practical situation is to produce a near real-time optimal solution in the presence of various types of uncertainties. Hence, several recent studies tackling UAS routing under uncertainties are discussed in this part,with typical sources of uncertainties classified into vehicle state, unknown environment, and disturbance (e.g., wind). Probabilistic methods are commonly utilized to represent UAS state measurement error. Yin et al.propose an online UAS path planning strategy where the UAS position uncertainty is characterized by a bivariate Gaussian model.77Safety index that indicates UAS colliding with obstacles on the path is further calculated according to the position density function and a search space cut down mechanism is particularly developed to improve the computational timeliness. In terms of environment knowledge uncertainty,incremental graph search algorithms have been mainly leveraged.Aggarwal and Kumar generate an optimal shortest path in the presence of keep-out zones with uncertain boundaries.78In their research, the Dijkstra’s algorithm is used in combination with Delaunay triangulation mesh to produce an initial guess path that approximates the optimal solution, which greatly improves both the computation time and solution optimality.Furthermore,the problem of wind disturbance in UAS routing is also addressed. Techy and Woolsey consider the minimum time path-planning for UAS in steady uniform wind with known speed and direction, where the numerical rootfinding algorithm is adopted for real-time implementation.96For varying wind conditions where there remains uncertainty in the estimation of wind speed and direction, the unknown wind component is specifically compensated by analyzing whether the potential path deviation due to additional wind would have a safety distance clearance, which is proven to be run-time efficient.79
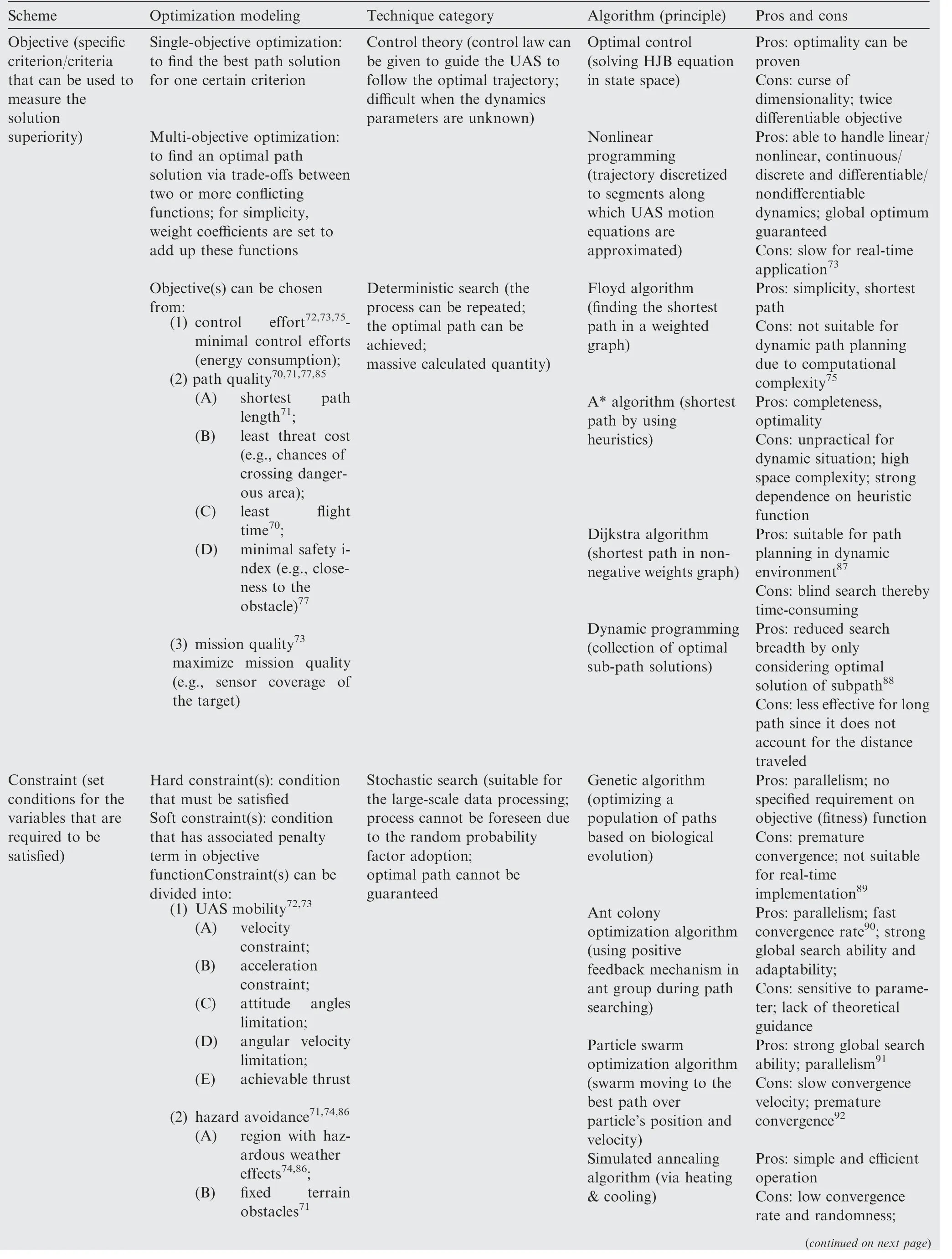
Table 7 Summary of optimization modelings and algorithms for UAS path re-routing.
3.3. Separation assurance
3.3.1. Challenges
ATS comprises activities concerned with separation assurance,where ATC issues clearance in order to maintain minimum separation values between the UAS and potential intruders.Serving as the second line in the three-layered safety management network, separation assurance tactically keeps UAS away from reaching a loss of separation(also termed as a conflict, after that collision avoidance is functioned as the last resort maneuver).14
Separation itself is a complex subject due to the various influencing factors including flying error and performance characteristics of each aircraft, etc. Furthermore, rational determination of separation values requires considerations on mathematical and statistical risk probabilities so as to achieve the Target Level of Safety(TLS).Currently,no explicit separation requirements exist for UASs,however,the problem is to design a specified separation-minima that satisfies two requirements at the same time. On the one hand, the separation value should be safe enough for risk mitigation. On the other hand, to safely handle the expected increase of traffic density brought by UAS integration, the value should be not so large as to lead unnecessary waste of airspace capacity.
Besides the essential separation standard, how the conflict risk can be managed to an acceptable level is critical to generic UAS operations in non-segregated national airspace.Risk prediction and mitigation controls should be especially concerned for UAS-centric encounters, with UAS unique characteristics(e.g., limited sensor capability, response latency) considered.Hence, separation assurance for UASs is still a challenging problem and studies on multiple functional components are conducted together to maintain traffic separation. Relations among these functional blocks are illustrated in Fig. 8.
3.3.2. State of art
Separation assurance is the problem of keeping the UAS well clear of other aircraft. Despite the fixed spatial criterion,known as a minimum of 3 nm of horizontal distance and 1000 ft of vertical distance for IFR radar separation, required well clear definitions can be grouped into two categories according to generation mechanisms: the volume-based and the time-based. The volume-based separation can be further classified as the reachability-based97,98and risk-based99,100ones, as shown in Fig. 9.
A comparison of three definitions of well clear for UAS is shown in Table 8. It is noteworthy that investigations about how these defined separation standards affect UAS operation safety have also been carried out.Lee et al.analyze the effects of different separation metrics on rates of separation violations.101Similarly, in the work by Cook et al.102, parameter choices of each separation definition are evaluated based on the pre-defined safety threshold, where safety is characterized by near mid-air collision probability,once the intruder aircraft moves across the given separation boundary.
With the separation standard being established,a trajectory estimation model is also required in order to predict possible separation violations. The key to modeling lies in how current UAS states are projected into the future. Currently, four primary intent prediction methods are proposed including straight-line extrapolation, worst-case, probabilistic and flight plan sharing.103Straight-line extrapolation is the most adopted method due to its simplicity and time efficiency. However,uncertainties in aircraft trajectories are not considered.104Worst-case projection is conservative and computationally demanding while flight plan sharing needs the most advanced technology for flight information exchange. The probabilistic projection method seeks a balance between the straight-line and the worst-case prediction, where a set of possible future trajectories are generated and weighted by the probability of occurring. Lin and Lai adopt these four prediction methods in UAS path prediction to manned aircraft,where a prediction correction algorithm is incorporated in the path prediction model for improved accuracy.105
Given the predicted states, approaches are then utilized to assess the conflict risk upon the corresponding state projection in the near future,most of which can either be grouped to geometric or probabilistic cases. The former relies on the analysis of geometric relations between aircraft involved in the encounter situation, where the predicted trajectory is surrounded by safety buffer to account for uncertainties.Two aircraft are supposed to be in geometric conflict when the distance between their safety zones becomes smaller than the minimum allowed separation distance. In general, geometric conflict detections using collision cone approaches are computationally efficient but sometimes have the drawback of false alarms. The probabilistic approach, on the other hand, relies on a probability density function of future intruder dynamics. An aircraft is deemed to be in the loss of separation if the event probability that the distance between agents becomes smaller than the specified minimum is above the pre-defined threshold. Owing to the advantage of easy-to-use and universally understood,Monte Carlo simulation techniques are widely chosen to evaluate the probability of conflict under varying encounter condition.106,107
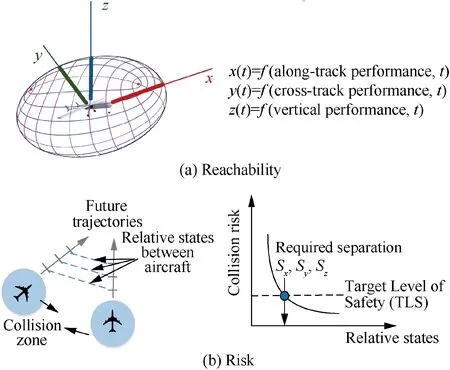
Fig. 9 Separation volumes based on reachability and risk.
Separation assurance also involves determining which resolution maneuver should be activated if a near future loss of separation is predicted. Different types of resolution techniques can be broadly categorized in four relevant domains,which are: the exact resolution maneuver (i.e., speed change,horizontal maneuver,vertical maneuver),the generation mechanism (i.e., rule-based, potential field, optimized, etc.), the multiple conflicts management (i.e., global, pairwise) and the relationship between conflicting vehicles (i.e., cooperative,non-cooperative).108Kuchar and Yang present a comprehensive survey of resolution methods for manned aircraft108while Jenie et al.build a general framework for various UAS resolution methods implemented in an integrated airspace,10to which readers can refer for additional recommendations therein.
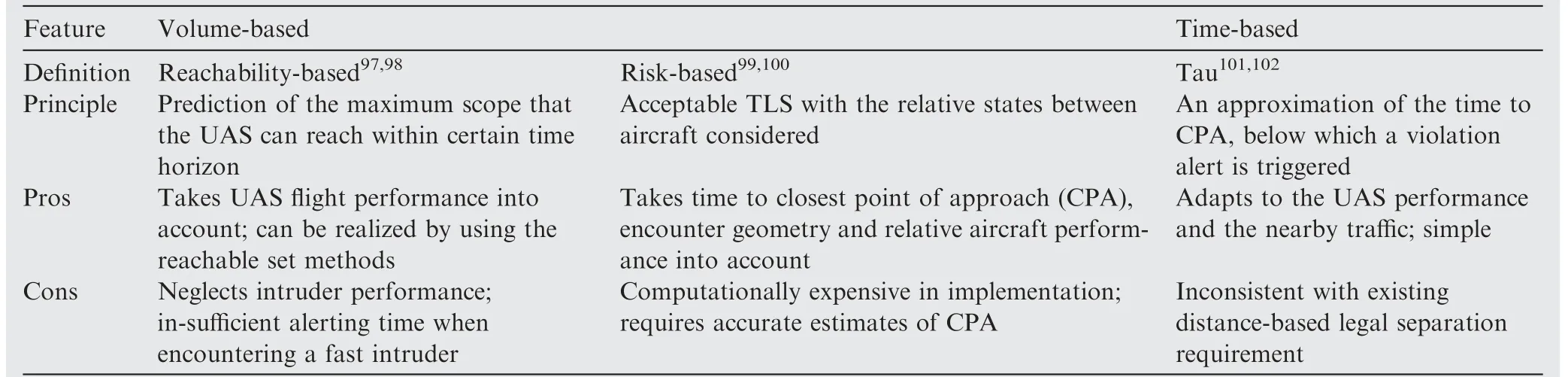
Table 8 Comparison of three UAS separation definitions.
3.3.3. Representative result
In order to reduce the computational complexity, most of studies focus on the two-agent separation assurance scenario.Johnson et al.investigate the rate of loss of separation of three proposed separation standards. Results obtained from UASmanned aircraft encounters expose the need to add buffers on the separation definitions for efficient alerting.109Similarly,Pe´rez-Batlle et al. evaluate three conflict scenarios (i.e., forward conflict, backward conflict and lateral conflict) between a UAS and a much faster airplane, assuming that separation will be guaranteed by changing the heading of one of the aircraft.110Results show that maneuvers should be invoked well in advance if the UAS is the maneuvering aircraft. A deeper analysis is conducted in their follow-up research where the turning limitations and delays of UASs are taken into account.111Besides pairwise encounters, studies on multiintruder scenarios commonly apply approximation methods on the encounter geometry to avoid the excessive computational burden. Gaussian distribution is mostly adopted to approximate the probability density while it lacks desired accuracy in a highly uncertain trajectory environment.Jilkov et al.thus estimate the conflict probability with a Gaussian mixture distribution.112
With regard to UAS-centric risk assessment in separation maintenance, several studies are conducted to assess the impact of the introduction of UAS in controlled airspace,where UAS operational features are especially considered.Kamienski and Semanek identify UAS impacts on ATC in flight plan filing and response latency.113Mosquera-Benitez et al.analyze factors that could affect the spacing buffer,which is further employed in the separation component to cover UAS communication latency and response time delay.114Wang et al.apply the Monte Carlo simulation to evaluate the conflict risk posed by an intruding UAS in terminal airspace,with minimal sensor data information on the UAS.107For en-route UAS integration, Pe´rez-Casta´n et al. compare the TLS in scenarios with and without UAS, with emphasis on how UAS average speed affects the conflict risk.115Specifically, besides rectilinear trajectory projection,Corraro et al.propose a traffic situation awareness algorithm that considers both straight and curved UAS trajectories, which is applicable to UAS separation maintenance guidance.116
3.4. Emergency procedure
3.4.1. Challenges
In addition to services highlighted above that provide supports for nominal conditions,an important aspect of ATS is the performance of emergency procedures for off-nominal events.Decision making in the potential contingency situation is a critical task for both UAS operators and ATC to ensure that the contingencies will not cause risks to other airspace users.However,UASs are much less reliable and experience far more failures than manned aircraft.Meanwhile,managing emergencies in UASs can be quite challenging due to its remote operational nature and the reduced situational awareness that the remote pilot may face.117Moreover, the vulnerable link adds an additional level of complexity specific to UASs,which indicates that some standardized procedures for loss of link contingency are required to execute autonomously.
3.4.2. State of art
The current state-of-art in emergency procedure is to generate contingency plans for two off-nominal cases, classified as the loss of control and the loss of communication. The former can be triggered by vehicle malfunction, for example, flight surface failure, engine fault. The major cause of loss of communication contingency, on the other hand, commonly refers to the communication link lost.
As these two are most difficult to deal with and have the most devastating consequences if not properly addressed, the response to such certain contingency is selected from a predefined catalogue of reactions according to the level of severity.It is noteworthy that the preplanned reaction response is closely related to regulations, UAS flight capabilities, airspace structures, etc.118A brief overview of the possible procedures to three separate severity categories: minor, hazardous and catastrophic, is given as follows.
(1) Minor. Continue the mission, response include
(A) safely recover the UAS by adjusting the control system;
(B) change altitude to re-establish the link;
(C) hover and use a special pattern to inform ATC of the loss of link problem.
(2) Hazardous. Cancel the mission, response include
(A) continue its current path for some time and then fly to a pre-defined landing site;
(B) directly fly to a pre-defined landing site including the original airport or the nearest airport, etc.
(3) Fatal. Terminate the flight, response include crash land the UAS in the flight termination field.
Depending on the cases and the level of severity, there are several works that facilitate the contingency decision making. Two of the typical techniques are the emergency recovery procedures and the emergency landing procedures.Specifically, emergency recovery procedures deal with failures that are minor in the degree of severity, in which the infected UAS should be possible to continue with its mission after the adjustment on its control system. For example, in cases where a UAS suffers a total loss of one or more actuators, novel control schemes are proposed to ensure the control of the infected UAS. Lanzon119, Lippiello120, and Merheb et al.121address the control allocation problem for the UAS with one disabled actuator while an iterative optimal control algorithm is proved to be capable of handling single- and double-actuator failures.122A cascaded controller developed by Mueller and D’Andrea is shown to be able to maintain a UAS hovering at a given height despite the loss of one, two opposing, or even three of its actuators.123The emergency landing procedures, on the other hand, are utilized to handle hazardous or even catastrophic failures.Within this category, relevant studies include landing site selection, emergency trajectory generation, etc. Selections of UAS landing sites have been made in the domain of computer vision and machine learning, where typical machine learning algorithms are adopted in conjunction with digital image processing techniques to avoid obstacles for a safe landing. Safety criteria including the surface type and UAS reachability are set as constraints in the feasible landing site selection. Given the landing location, emergency trajectory generation is responsible for guiding the UAS to the landing site. Previous works have presented real-time emergency path planning for UAS forced landing in constant or changing wind conditions.124,125In particular, a team led by Kwan and Ayhan develops a contingency planning software prototype, where the contingency path planning in some exemplar application scenarios is carried out using realistic flight plans.118Details can be found in some of the team’s past publications.
3.4.3. Representative result
A full understanding of what emergency procedures are acceptable to ATC is crucial especially when UASs are seeking more complex operations in dense controlled airspace. Hence,further details of two representative studies on the evaluation of contingency procedures are depicted in this part.
Fern et al. evaluate the impact of four currently-adopted UAS emergency procedures on the Southern California TRACON sector safety and efficiency and ATC performance.126Four procedures include: return to base with different lag times (1 min and 8 min, respectively), or continue to destination or land at the emergency site. Results show that there are no significant differences between these four contingencies,and even between the baseline scenario where no contingency is injected. In other words, the presence of the UAS - with or without a contingency - will make a very limited impact on the ATC performance.Similarly,Kang et al.assess the impact of UAS contingency procedures on Seoul-Jeju route safety and ATC workload.127Three procedures include: return to base at different turning points (ATASO fix and SAMUL fix, respectively), or continue to destination. However, the findings of the latter are slightly different from those of Fern et al.126. It is demonstrated that the two return-to-base procedures have the advantage over the continue-to-destination procedure in both safety and ATC workload. This may partially result from the simulation scenario, since the former focuses on the terminal area while the latter is in the enroute phase.
4. Key technological enablers for UAS-ASNP interaction
In previous sections, we demonstrate that the integration of UAS within civil airspace will require ANSP to manage the airspace and assist flight executions on a strategic and tactical level. In the meantime, from the individual level, it is also recognized that UAS in non-segregated airspace should be indistinguishable from that of manned aircraft operations. This means the UAS together with its remote pilot will be required to respond to decisions made in the strategic phase and comply with any tactical ATS instructions. Therefore, UAS configurable technical elements must be addressed to assist in interactions between ANSP guidance and UAS compliance.
While essential ATS guidance provided through UASANASP coordination is outlined in Section 3, we then discuss enabling technologies that contribute to the coordination. As shown in Fig.10,persistent CNS coverage,piloting techniques and SAA capabilities all assist in the reliability and safety of UAS flight operations. Among multiple emerging technologies,however,the C2 link together with the SAA system plays the most crucial role in the UAS-ANSP interaction,since connectivity among unmanned vehicle,remote pilot,ATC authority and nearby traffic is enabled by these two key technological enablers.
This section discusses the characteristics, performance and availability of two enablers, respectively.
4.1. UAS C2 link
4.1.1. Characteristics
With the cockpit located on the ground, the on-ground pilot and on-board UAS flight control system are connected through a communication link.Besides the primary communication function, functionalities of this Command and Control(C2) link (or CNPC, short for control and non-payload communication) also include: manipulation function, through which the remote pilot controls the maneuvers of the vehicle;navigation function, through which pilot manages the flight trajectory; and traffic awareness function, through which situational awareness information obtained by onboard equipment could be transmitted to the ground control station. To meet multifunctional implementation, characteristics of the C2 link should satisfy the following requirements:
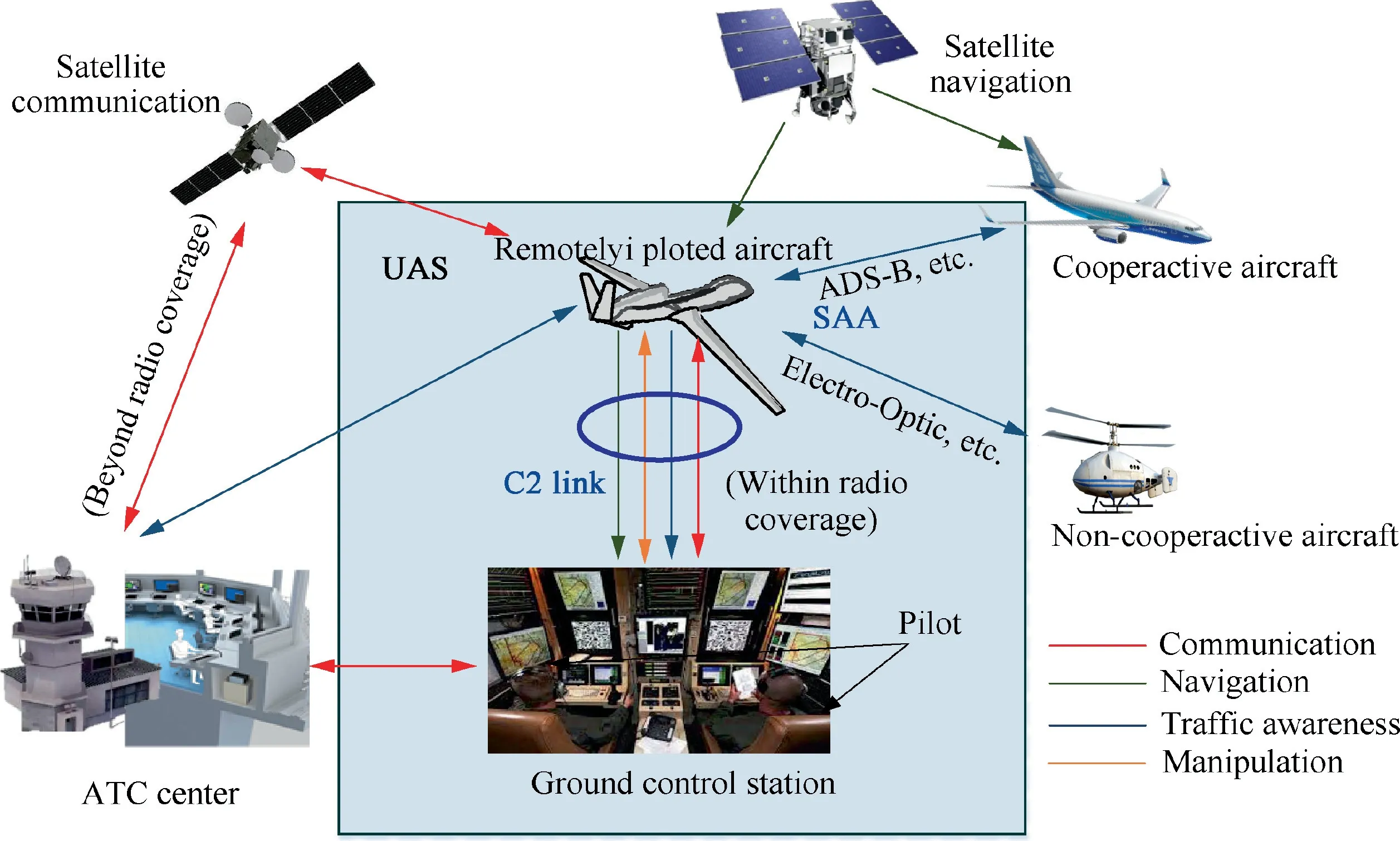
Fig. 10 Key technological enablers for UAS-ANSP interaction.
(1) Modest data rates. Data rates for C2 link are expected to be modest. For example, the maximum downlink information rate of medium and large sized UASs should reach 316 kb/s for compressed video.128
(2) Low latency.The impact of latency on C2 link is a prime factor when considering the safety of UAS operations.The potential latency of control messages should be minimized due to the time-critical operational demand of UASs.(3) Sufficient communication range. The C2 link is responsible for providing connectivity for information exchange across all phases of flight and consequently is required to enable very-long-range transmission and reception.
(4) High reliability. High reliability of the critical C2 link must be ensured. For example, independent back-up such as using two non-correlated frequencies may be needed to offer protection against possible failures.
(5) High security. High security should be ensured since message confidentiality and integrity may be degraded by an unsecured C2 link.
4.1.2. Performance evaluation
The C2 link provides safety-critical information for the control of UASs and consequently is required to use protected aviation spectrum. In 2016, RTCA Special Committee 228 (SC-228) published the Minimum Operational Performance Standards (MOPS) for LOS Terrestrial C2 link.129Two frequency ranges to be applied to the terrestrial-based LOS C2 are in LBand (960-1164 MHz) and C-Band (5030-5091 MHz). For a satellite-based BLOS C2 link, the aviation safety spectrum allocation is currently inadequate.130In order to provide safety communication service, communication performances and potential candidates of both LOS and BLOS C2 links have been evaluated extensively.
For LOS C2 links,commercial technologies,represented by cellular and wireless local area networks (Wi-Fi), are recommended for general use. However, for some C2 links, these may be over-designed and are vulnerable as well to jamming and spoofing. Therefore, works in this area still seek to research other existing and emerging technologies for the airground communication.A shortlist of the potential candidates that operate or are expected to operate in the frequency bands allocated for UASs is given in Table 9,with their performances discussed as well.
Specifically, a recent multi-criteria analysis is conducted by Neji et al. to assess each candidate in terms of both essential and desirable performance.131It is concluded that 5G is the best candidate owing to its good performances like high security level and low power consumption. This is coherent with the literature, namely a review of new emerging technologies that may be employed for UAS C2 made by Hosseini et al.in 2019.132In the latter research, the Ultra-Reliable and Low-Latency Communications (URLLC) is viewed as a promising option for terrestrial C2 link due to its strict quality-of-service requirement on latency (e.g., 1 ms) and transmission success rate (e.g., 99.999 %).133
For BLOS C2 links, the use of satellite connections is a viable option for UASs above ocean and in remote areas where the terrestrial network (Wi-Fi or cellular) coverage is unavailable. Comparative performance evaluations of three different classes of satellite system orbits,whether existing or upcoming,are presented in Table 10. It is noteworthy that a LEO satellite’s proximity to earth compared to geostationary and medium earth orbit gives it a better signal strength and less of a time delay, which makes it more applicable to the delaysensitive C2 of UASs.
4.1.3. Availability analysis
Studies carried out by NASA have paid significant attention to both LOS and BLOS C2 link reliability and availability. A communication subproject is particularly launched to enable C2 link certification by providing evidence that the required performance levels are met. The whole subproject is divided into two phases:the first is from 2012 to 2016 while the second is planned for 2017-2020. Primary focus in Phase 1 is on the radio LOS C2 link using terrestrial-based communications while BLOS C2 link is the objective of Phase 2. Analysis conclusions derived from availability researches that have been completed to date are briefly reviewed in this part.
During Phase 1, for LOS C2 links, an extensive air-ground channel propagation measurement campaign has been conducted on a Lockheed Orion S-3B research aircraft in bothL-Band and C-Band,with seven terrain types covered.134During the test,channel impulse responses are measured and channel models are derived according to the terrain types studied.Meanwhile, to validate whether reliable and efficient communications can be guaranteed by a typical C2 system working in L-Band and C-Band, five generations of prototype radios for LOS C2 links are used in the C2 radio flight testing.135Testing statistics include communications scope,data throughput performance, and handoff performance, which enable the completion and validation of the MOPS.
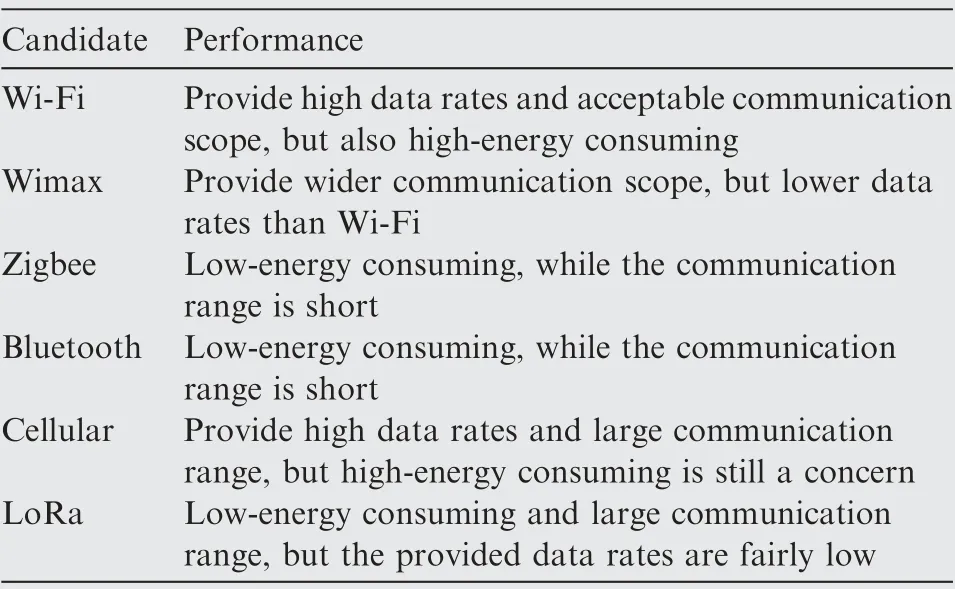
Table 9 A shortlist of potential LOS C2 link candidates and their corresponding performances.
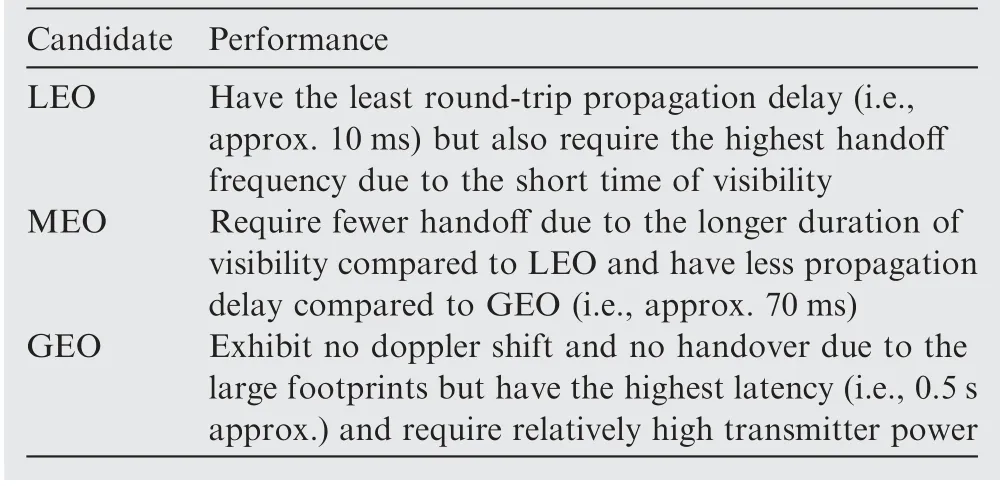
Table 10 Comparative performance evaluations of three different classes of satellite system orbits.
For BLOS C2 links, satellite spectrum allocations are currently inadequate to satisfy the projected spectrum requirements since no on-orbit systems are in place and available to enable the use of 5030-5091 MHz band.Therefore,it has been approved by WRC-15 to utilize existing Fixed Satellite Service(FSS) frequency bands, specifically the Ku-Band (12-18 GHz)and Ka-Band (26.5-40 GHz), for BLOS C2. However, as the same frequency bands are also allocated to terrestrial Fixed Service systems, Agenda Item 1.5 requires impact assessment of UAS C2 link operations on other services working in these frequency ranges. Kerczewski et al. examine the potential interference from a UAS earth station transmitter to the FS receiver in their spectrum sharing studies.130,136Protection criteria developed in the approved International Telecommunication Union (ITU) recommendations are employed to determine whether the interference can be lowered to an acceptable level. It is concluded that, considering the anticipated UAS density in the airspace, inference caused by spectrum sharing will meet the long-term protection criteria while it fails to meet the short-term requirement.
Activities required for Phase 2 are still in progress. Similar to Phase 1, bench testing and flight testing will be undertaken for validation of the satellite BLOS C2 link. Standards development is also on the agenda to establish BLOS C2 satellite communications MOPS. Furthermore, additional testing and analysis will be carried out to support terrestrial extension of the C2 Terrestrial MOPS, which will focus on lower altitude,higher UAS traffic density than that considered in Phase 1.Overall, progress in the BLOS phase of the project will continue to contribute to the availability analysis of the C2 link.
4.2. UAS SAA system
4.2.1. Characteristics
Unlike pilots on-board aircraft,UASs have no on-board pilots to undertake the see and avoid responsibility. To mitigate the absence of the see and avoid capability, the UAS Sense and Avoid (SAA) system is developed to enable autonomous self separation and collision avoidance. As the UAS integration into non-segregated civil airspace requires an equivalent level of safety to that achieved by manned aircraft, the intended functions provided by the UAS SAA system should meet the following requirements:
(1) Adequate sensing ability. To help UASs acquire useful information on the presence and position of intruders.Meanwhile, given the SWAP constraints, the employed sensors are expected to be lightweight, small in size and consume low power.
(2) Precise detection ability. To help UASs determine if there remains imminent collision. The detection should be precise enough to minimize false alarms and miss detection. Additionally, the processing also needs to be computationally efficient so as to allow the UAS to prevent collision with a faster manned aircraft.
(3) Interoperable avoiding ability. To provide collision avoidance functions that are compatible with expected behaviors of other aircraft operating in the airspace system.
4.2.2. Performance evaluation
Up to now, numerous studies have been devoted to the summarization and classification of SAA technologies from different aspects, with their emphasis on different functional components (i.e., sensing, detection or avoiding) or different sections of the components (e.g., sensors, trackers, detection algorithms,maneuver approaches).However,instead of giving a detailed tutorial on principles,the survey mainly focuses on a brief introduction of existing and/or emerging surveillance sources that are applicable for UAS SAA systems.
In 2017, RTCA SC-228 published the MOPS for SAA systems where surveillance devices (or sensors) specified in the standard include airborne radar for non-cooperative intruders,active surveillance sensors and ADS-B In system for cooperative intruders.137Depending on information sources, sensors can be classified as cooperative ones, which typically require an onboard transponder to interrogate and broadcast information, and non-cooperative ones, which enable the detection of aircraft with no transponder equipped. Cooperative technologies such as Traffic Alert and Collision Avoidance System(TCAS, also termed as ACAS) and ADS-B have been extensively applied on manned aircraft for their proven reliability in situational awareness provision while their performance evaluations for use in UASs are ongoing. Meanwhile, efforts have also been devoted to non-cooperative sensors for potential adoption in UAS SAA systems. Non-cooperative sensors are further separated into active and passive ones, depending on whether they transmit the signal for detection or not. Representative active sensors include radar, Laser Identification Detection and Ranging (LIDAR), while EO, infrared, and acoustic sensors belong to the passive group.
As performances of self separation and collision avoidance heavily depend on the confidence of sensing results,138SAA systems can be classified based on the specific sensor(s)employed.Comparative performance evaluations for SAA systems adopting these technologies are summarized in Table 11,which is an extract and extension of a previous analysis done by Yu and Zhang.9
4.2.3. Availability analysis
Extensive studies have been performed to investigate and validate the availability of the existing SAA systems that could be expected in the range of UAS operational environment.Therefore, this part outlines several SAA flight tests led by government agency or research organization with UAS SAA systems using information sources such as TCAS-II, ADS-B,ACAS-Xu, radar, EO or a mixed architecture.
For cooperative SAA applications, in 2006, the U.S. Air Force together with Lincoln Laboratory began a comprehensive safety research on the use of TCAS-II with Resolution Advisories on the Global Hawk UAS.139Despite it has long been used by manned aircraft,it turns out that the display feature and algorithmic design of TCAS-II are not friendly to aircraft with no pilot on board. Moreover, the direction information provided by the directional antenna in TCAS-II is not precise enough,and thus it should not be equipped alone on the UAS but served as a supplement with other devices that can produce accurate directions. The adoptions of ADS-B for cooperative SAA applications are demonstrated in small UAS flight testing and results validate that the ADS-B based SAA system could support a high level of safety.140,141As ACASXu is envisioned for UAS, implementation and proof-ofconcept trials have already taken place. In June 2019,ACAS-Xu engineering analysis results were presented in the RTCA SC-228/SC-147 Joint Meeting where the horizontal and vertical RA guidance were highly accepted by pilots in the trial.142
For non-cooperative SAA applications,regarding the SAA requirement in all-weather, and day or night environments,MIT Lincoln Laboratory develops a prototype SAA radar system on a UAS surrogate aircraft.143Results obtained from a total of 108 encounters and 384 min of in-flight radar operation demonstrate sufficient accuracy to sense and avoid noncooperative aircraft. Sensing technologies such as EO and infrared are also widely studied and related systems are developed.144
However, since information provided by a certain sensor can barely achieve the SAA application requirement,the multisensor-based system has been developed. NASA validated a multisensor SAA system integrated onto an MQ-9 Reaper unmanned aircraft in 2014.145As data come from a series of sensors including ADS-B, radar and TCAS, system advantage in intruder detection as well as system reliability is proved by 170 encounters with other air traffic.
5. Future directions and challenges
The goal of UAS routine access to national airspace requires a safe and sustainable supporting management system that accommodates these new entrants’ unique operational needs while continuing efficient operations for other airspace users.As the key stakeholder who is responsible for setting and managing airspace access for all air activities, ANSP should participate in the development of such UAS-centered management system (i.e., UTM) and facilitate increasingly frequent interactions with the existing ATM system.
Although system-level ANSP requirements for UTM systems have not yet been developed, core principles in the current ANSP-supplied ATM system still remain applicable to guide UTM implementation. For example, as one of the most critical concepts in ICAO latest Global Air Navigation Plan(GANP), Trajectory Based Operations (TBO) has been introduced as the primary focus of multiple global ATM research programs including SESAR (EU), NextGen (US), CARATS(Japan), etc. Such concept will also become more adaptable to UAS integration since the agreed 4-Dimensional (4D) trajectory will meet the UAS unique flight patterns while also facilitating ATS provision. Meanwhile, by utilizing the data of trajectory information, less constrained airspace arrangement is required, thereby permitting more dynamic airspaceconfiguration and adjustment.Therefore,from the ANSP perspective, modern initiatives such as TBO will contribute the UAS integration in civil airspace and thus the new UTM system should conform to ANSP future trends while developing UAS-oriented practices at the same time.
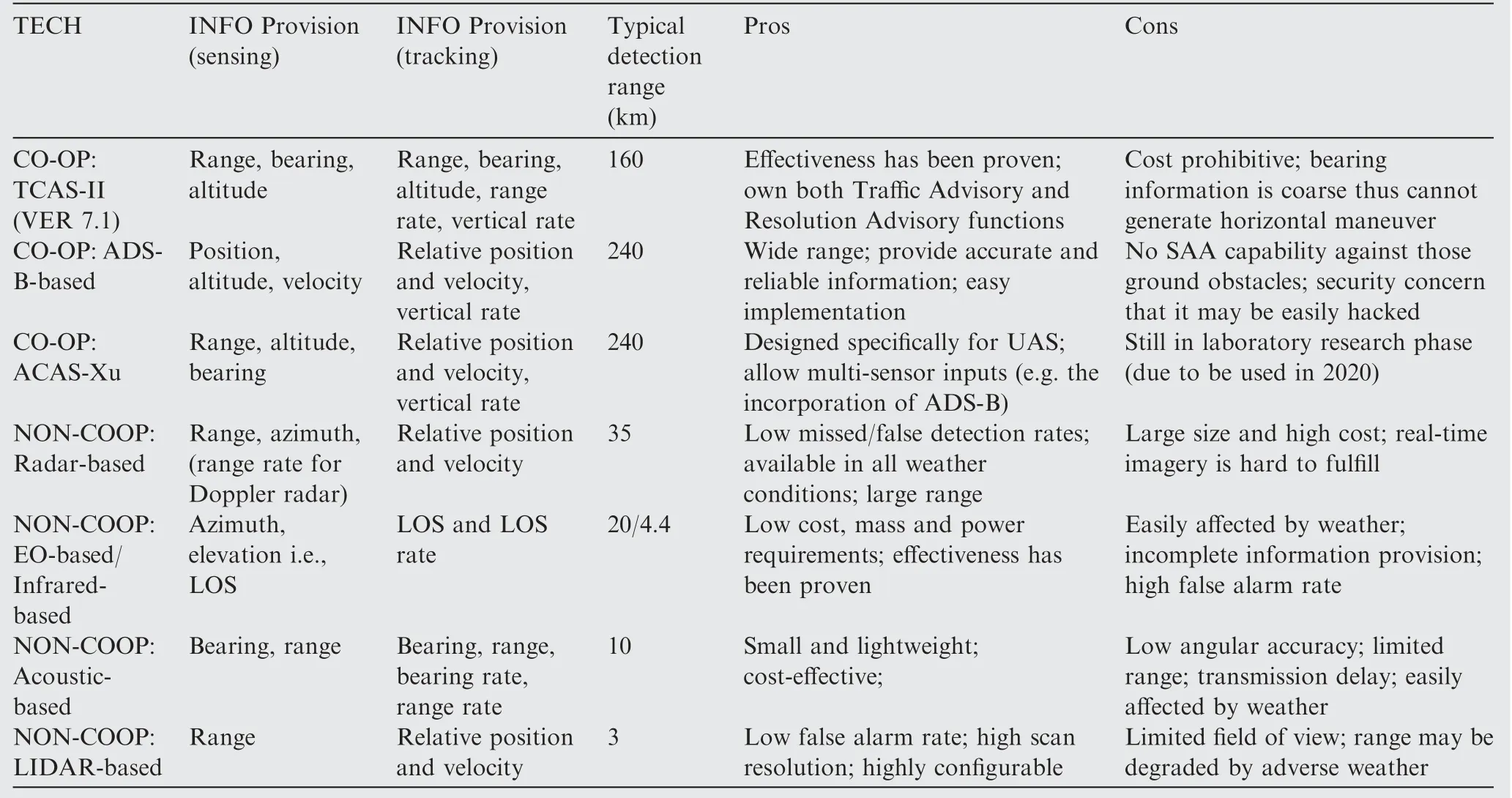
Table 11 A summary of existing SAA systems and their comparative performances.
To offer more insights on the integration of civil UASs into the national airspace,the paper next suggests future directions and challenges:
(1) Airspace organization and management. Airspace organization and management has been the cornerstone for the safe integration of UAS. As there is no one size fits all airspace structure that applies to UAS, we recommend the adaptable airspace organization that could ideally coordinate variable UAS traffic patterns. The paradigm may therefore change from the current ‘operation follows organization’ to the more advanced‘organization follows operation’. To facilitate such flightcentric airspace management, some directions remain to be researched,which include:(A)improvement of airspace classification in terms of UAS integrated operation in the controlled airspace. According to ICAO Annex 11, the controlled airspace is defined into several categories: A, B, C, D, E and F. However, the above classification does not take UAS operations into consideration; (B) common situational awareness of airspace.Relevant national airspace information shall be available to airspace users and users also shall input requests that affect the airspace. A universally standardized information exchange protocol shall thus be introduced into the airspace management process to enable the same awareness of flight intents and zones of restrictions; (C) data-driven dynamic management. Accurate and timely predictions of traffic behaviors and reductions in capacity are needed to coordinate the dynamic adjustment. High volumes of post-operational data may be analyzed using big data technology and converted into proposals that help the reconstructed airspace configuration meet traffic demand in a more efficient manner.
(2) UAS trajectory management. With regard to future advanced TBO concept in ATM version, a flexible and powerful UAS trajectory management is recommended in UTM context with guidance and control over the trajectory.As the 4-Dimensional Trajectory(4DT)concept has become the next step for the flight management in the future, thanks to its substantial enhancement in flight predictability and ATC situational awareness,several specific research fields across the entire time horizons from strategic planning to tactical decision making may be particularly remarkable for facilitating the UAS integration: (A) strategic UAS 4-Dimensional flight planning under Flight and Flow Information for a Collaborative Environment(FF-ICE).Flight intention provision is a critical functionality for the UTM system,which could be powered by the FF-ICE as to enable the consistent flight planning, trajectory revision and Collaborative Decision Making (CDM) services among UAS operators,UAS service suppliers,airlines,airports,and ANSPs; (B) pre-tactical UAS trajectory management measures for demand-capacity imbalance mitigation. Demand-capacity imbalances can be resolved in the pre-tactical phase as the TBO paradigm enables accurate and reliable UAS trajectory prediction. Relevant stakeholders may negotiate on the agreed TBO trajectory to make necessary adjustments to the UAS planned trajectory, considering cases where demand of airspace use exceeds capacity; (C) tactical UAS conflict detection and resolution under both nominal and offnominal scenarios. UAS actual flown trajectory may deviate from the desired trajectory if a conflict resolution maneuver for separation assurance is necessary.Automation decision support may be needed to help identify and resolve short-term conflicts in both nominal and contingency circumstances.
(3) Technology and system improvement. To further support the efficient, safe and reliable UAS operations in civil non-segregated airspace, there is still much room for improvement in UAS CNS, C2 and SAA capabilities. Future research topics on technology and system improvement include: (A) addressing the challenges of cybersecurity, satellite-based navigation, and scalable surveillance for UASs. CNS integration, consolidation and miniaturization are also required; (B) improving the communication capability of UAS via the Space-Air-Ground Integrated Network. For instance, relay of C2 communication between ground and air (e.g.,between ATC, UAS pilot and UAS), from air to air(e.g., between UAS and a satellite/the other UAS) can be facilitated by the integration of satellite systems, aerial networks and terrestrial communications; (C) developing a multi-system compatible navigation architecture for civil UAS through the integration of inertial, ground nav-aids and Global Navigation Satellite System (GNSS) (e.g., GPS, Beidou); (D) promoting the application of both cooperative and non-cooperative surveillance techniques. For instance, priority will be given to the implementation of ADS-B in high-altitude airspace while improved non-cooperative surveillance systems will also be needed for providing detection of non-cooperative traffic. An effective data fusion algorithm that aggregates aeronautical data from multiple trackers (both airborne and ground-based systems)may require extra consideration to display a clear and sound air situation; (E) developing UAS SAA systems for controlled and uncontrolled airspace without the induction of interoperability issues.In principle,the system should be performance-based. SAA system for UASs transitioning to and from controlled airspace shall be developed and certified in accordance with the published MOPS for SAA systems (known as RTCA Doc 365). However, such system is unlikely to be applied to small-sized UAS. Hence, small-size, light-weight, and low-cost SAA system dedicated to sUAS operating in uncontrolled airspace may be further employed.
(4) Standardization and regulation considerations. Standardization and regulation efforts towards UAS integration are currently undergoing in several industry standards bodies.For instance,RTCA SC-228 develops the MOPS for UAS SAA in Working Group 1 and data link standards for C2 in Working Group 2. For UAS intended operations in the national airspace,compliance with such agreed-upon equipment-specific standards is recommended as one means of assuring that the devices will perform their intended functions and the overall UAS will behave like any other aircraft. However, it is also expected that there will be general principles of UAS-specific ATC procedures with unique UAS operational characteristics taken into account. It is noteworthy that the difference in UAS mission profiles (e.g.,non-point-to-point trajectories),C2 latency and vulnerability may complicate ATC service provision.Therefore,regulatory efforts may be needed to help develop standardized ATC procedures handling these associated challenges and appropriate ATC training may also be required to be carried out.
6. Conclusions
Owing to the inherent attributes such as mobility, flexibility,and adaptive altitude, UASs are expected to have extensive applications in civil and public fields. However, ANSP currently only allows UAS operations in non-segregated airspace being achieved on a case-by-case basis. To integrate sUAS,taxi-UAS, and larger, more complex RPAS into low, urban,and controlled airspace on a regular basis, ANSP should help develop a flexible UAS-centered management system (i.e.,UTM) that accommodates these new entrants. Central to the successful implementation of such a system will be a common framework that describes how various UAS operations are handled in the UTM system.Hence,the initial part of the survey is to introduce a high-level UTM architecture from the ANSP perspective, with interfaces and interactions among multiple stakeholders stressed.
Secondly,for UTM to be successful,three key management considerations-how airspace is structured and managed with the aim of making the best possible use thereof,how traffic services and instructions are provided during the UAS flight executions and what essential UAS elements are required to meet airspace and service requirements-need to be resolved.Therefore,this paper has surveyed these three major considerations in ANSP context,that is,AOM,ATS provision,and SAA technology together with other representative technical enablers.Additionally,this paper aims to offer readers a perspective on general procedures in UAS-ANSP coordination instead of offering an exhaustive review of existing mechanisms and approaches.
Specifically, this paper would like to stress that the three key domains are combined to establish a three-layered safety net, serving as building blocks for UAS-ANSP coordination.The strategic AOM reduces reliance on the tactical separation assurance in ATS provision while collision avoidance serving as the last resort also benefits from SAA-enabled technologies.Furthermore, we also specify multiple operational, technological and regulatory improvements needed for the safe,efficient and reliable UAS operations as well as indicating future research directions. This research study on UAS operations in national airspace may provide unique guidelines for achieving the harmonized UAS-ANSP coordination.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
This work is co-supported by the Outstanding Youth Fund of the National Natural Science Foundation of China (No.61822102), the MIIT Technological Base Program (No.JSZL2016601B003), and the National Key Research and Development Program (No. 2018YFB0505105).
 CHINESE JOURNAL OF AERONAUTICS2021年3期
CHINESE JOURNAL OF AERONAUTICS2021年3期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Criteria for hypersonic airbreathing propulsion and its experimental verification
- Effect of scavenge port angles on flow distribution and performance of swirl-loop scavenging in 2-stroke aircraft diesel engine
- Ship detection and classification from optical remote sensing images: A survey
- Variational method based robust adaptive control for a guided spinning rocket
- Inertial parameter estimation and control of non-cooperative target with unilateral contact constraint
- Theoretical modeling of vectoring dual synthetic jet based on regression analysis