
基于B 样条函数的快速波前复原
2021-04-01 07:24李恩德杨金生李喜琪樊新龙杨泽平张雨东
光电工程 2021年2期
陈 浩,魏 凌,李恩德,何 益,杨金生,李喜琪,樊新龙,杨泽平,张雨东
1 中国科学院光电技术研究所,自适应光学重点实验室,四川 成都 610209;
2 中国科学院大学材料科学与光电子技术学院,北京 100049;
3 江苏材料光学重点实验室,江苏 苏州 215163;
4 中国科学院苏州生物医学工程技术研究所,江苏 苏州 215163
1 引 言
夏克-哈特曼波前传感器(Shack-Hartmann wavefront sensor,简称哈特曼)是一种常用的斜率型波前探测器,被广泛应用于自适应光学的相关领域[1-3]。它并不能直接探测波前的相位信息,只能通过子孔径内的斜率重构波前相位。由于传感器的噪声、采样误差、子孔径内存在高阶像差等原因,斜率的计算易受噪声影响。尽管可以提高斜率计算的精度和抗噪能力[4-5],为复原计算提供更精确的输入,然而,斜率探测误差是不能完全消除的,这需要波前复原算法具有抗噪能力。因此,波前复原算法需要综合考虑抗噪性、准确度和计算复杂性。常见的复原算法可以分为两类:区域法和模式法。
区域法在待测波前点与斜率测量点之间建立差分模型,然后通过求解线性的差分方程组复原波前信息,传统的区域法模型有Fried[6]和Southwell[7]等。这种方法具有良好的局部性,可以较精确地复原局部区域的像差,并且可以用于任意形状的光瞳。然而由于差分模型的精度及差分过程导致的误差,算法抗噪能力较弱。另外,由于差分模型的限制,复原的波前点数量与子孔径数量相当,需要通过插值来获得高空间分辨率的波前信息,而这会带来额外的误差。
模式法一般采用空间正交多项式复原波前。最常用的是Zernike 多项式,因为它与Seidel 像差有非常直接的对应关系[8]。模式法复原的波前具有解析表达式,可以得到任意空间分辨率的波前信息。由于Zernike多项式只在圆域内正交,因此只能复原圆形光瞳的波前,不少学者采用变换等方式使Zernike 可以适用于方形或其它形状的光瞳[9],但仍存在变换复杂,不能完全适用于所有形状光瞳的缺点。另外,尽管Zernike多项式在圆域内是正交的,但其导数并不正交,即各个模式的斜率不正交,因此会发生模式泄露,并且在不同阶次的Zernike 空间中,展开系数是不一样的。Nam 等[10]提出正交化斜率矩阵的方法来解决这个问题,但此时的解空间已不再是原本的Zernike 空间了。另外,由于正交多项式的非局部性,导致任一子孔径的斜率可能会对所有的模式产生影响,对边界上的波前复原精度较差,因此模式法不能很好地复原局部区域的像差。由于多项式的正交性,模式法一般适用于圆形光瞳或方形光瞳,当光瞳形状与预设不一致时,复原精度会受到比较严重的影响。
在高能激光[3]、光学加工检测[11]以及基于像差的PSF 计算[12]等应用中,对局部像差的复原能力要求相对较高,而基于Zernike 多项式的模式法由于局部性较差,并且复原的像差容易在边缘出现较大的值,在这些场合应用有限。
为了保证复原的局部性同时提高抗噪能力,样条函数的方法得到了广泛的应用。Seifert 等提出了一种采用三次B 样条进行波前复原的方法[13],该方法用二维三次样条曲面对波前进行最小二乘拟合。由于B 样条曲面的平滑性和紧支撑特性,可以在保留局部性特征的同时,具有比传统区域法更强的抗噪声能力。文章仿真结果表明,随着样条数量的增多,局部复原精度越高,但当样条数量接近斜率采样点数量时,复原矩阵的条件数会增大,复原精度会有所下降。然而文章并未明确B 样条数量的选择方法,只是建议针对应用场合的像差仿真来确定最优样条数量。Ares 定量比较了三次B 样条波前复原算法与Zernike 模式法的性能区别[14],证实了对于复杂的波前,三次B 样条复原方法更具有优势。随后,Cornelis 等提出了基于多变量的非线性样条波前重构方法(spline based aberration reconstruction,SABRE)[15],该方法本质上属于区域法,通过特定的三角形分割方式,采用样条函数空间模型代替常规的差分模型,该方法可以适用于任意形状的光瞳和任意的子孔径布局。SABRE 方法在模型划分时,有多种分割模型,不同分割模型的复原精度也不尽相同,而文章中并未提出分割模型的选择方法。Huang 等提出了一种使用局部化的三次样条函数复原波前的方法[16],尽管能提高局部复原精度,但也更容易受到噪声的影响。Pant 使用加权的三次样条函数复原波前[17],在提高算法抗噪能力的同时也提高了算法计算复杂度。
从以上文章可以看出,相比普通样条函数,B 样条函数在控制点处均具有相同的样条基函数,在抗噪能力和局部复原能力上均衡,计算复杂度也较小。本文以2 阶B 样条为例,提出了一种基于B 样条函数的快速波前复原算法,并将原本的斜率最小二乘化问题转化为泊松方程,然后使用超松驰迭代法进行求解,大大减少算法的存储需求和计算量,若使用分块加速超松驰迭代法,还可以提高算法的并行程度,方便应用到多核PC 系统、FPGA 或DSP 等硬件平台上。
本文结构如下:第二节介绍基于B 样条的波前重构算法;第三节介绍基于泊松方程的2 阶B 样条快速复原算法;第四节通过对驱动器响应函数测试的实验,将本算法与传统波前重建算法进行比较;第五节对全文进行总结和展望。
2 基于B样条的哈特曼波前快速复原算法
2.1 哈特曼基本原理
哈特曼波前传感器通过微透镜阵列、小孔或光栅等光学元件,将待测波前分割为N个小区域后,每个区域会在CCD 上成像。当待测量波前与参考波前存在偏差时,这个偏差会转化为子孔径内光斑的偏移(Δx,Δy)i,i=1,2,...,N,令波前为φ,微透镜焦距为f,则有:

波前重构算法即是通过采样到的{∇φi}复原出波前φ。
2.2 B 样条曲线
B 样条(Basis spline)最初由Isaac Jacob Schoenberg提出,其具有几何不变性、凸包性、保凸性、局部支撑性等优良特性,是应用最广泛的样条函数之一[18]。
k阶B 样条曲面方程可表示为

其中:i和j为节点序号,为控制顶点,Ni,k及Nj,k为k次规范B 样条基函数,基函数为次分段多项式,可由递推公式得到:

定义u i=i,即均匀采样的情况,则可以得到1 阶和2 阶B 样条基函数分别为

图1 绘制了控制节点间隔为1 的1 阶和2 阶B 样条基曲面。
2.3 基于2 阶B 样条基曲面的波前复原
为简化表述,令:


图1 B 样条基曲面。(a) 1 阶B 样条基曲面;(b) 2 阶B 样条基曲面Fig.1 Surfaces of B-spline basis.(a) First-order B-spline surface;(b) Second-order B-spline surface
易知B(x,y) 为关于原点对称的函数。由2.2 节知,B(x,y)具有紧支撑特性,通过将像差波面分解为一系列B(x,y) 波面的叠加,可以在有效抑制噪声的基础上更好地复原局部波前。
为使B 样条复原的空间频率最高,需要B 样条基的数量不少于波前采样点的数量,对于方形布局的微透镜阵列,在传统的区域法中,有两种常用的模型可以借鉴——Fried 模型和Southwell 模型。
图2 描述了这两种模型的B 样条基位置与子孔径之间的关系。其中灰色圆圈表示样条基的位置,正方形为子孔径位置,正方形内的正交箭头为子孔径内斜率。
假设子孔径数量为(M×N),为达到最优的空间分辨率,在 Fried 模型中,B 样条基数量为(M+1)× (N+1),Southwell 模型中,由于B(0,0)=0,需要在上下左右至少分别补充1 排B 样条基,即B 样条基的数量最少为(M+2)× (N+2)。
以子孔径边长为单位,令左上角坐标为(0,0),则Fried 模型和Southwell 模型排布的B 样条基分别如式(7)和式(8)所示:

代入式(1),则对于每个子孔径有:


图2 方形排布的B 样条基位置与子孔径之间的关系。(a) Fried;(b) SouthwellFig.2 Positional relation between B-spline basis and subaperture with a square layout.(a) Fried model;(b) Southwell model
由于B(x,y) 的紧支撑特性,R为一稀疏矩阵,因此式(12)为稀疏方程。
易知,若B(x,y) 使用1 次B 样条函数,式(12)与传统的Fried 区域法一致,而Southwell 布局也有类似的关系,因此传统的区域法可以视为B 样条函数复原算法在1 阶条件下的特例。为了描述简洁,本文后面的讨论和仿真均采用Fried 模型,而Southwell 模型推导方式与之类似。
3 基于泊松方程的快速2 阶B 样条函数波前复原算法
式(12)的直接解法为求解R的广义逆矩阵,即

尽管R为一个稀疏矩阵,但R的广义逆矩阵R+并不是稀疏矩阵,在复原的时候即使提前计算好R+,也需要(M+1)2× (N+1)2个数的存储空间,并且一次重构需要(M+1)2× (N+1)2次乘法。当子孔径数目比较多的时候,使用FPGA 或DSP 等计算时,会带来巨大的空间开销,可以预估,当子孔径数提升1 倍时,存储空间和计算量会提升16 倍,这种情况下,这种计算方法将制约B 样条波前复原算法的应用。
由式(10)知,波前重构是求解如下最优化问题:

代入式(10),可得:

图3 B 样条散度积分示意图Fig.3 B-spline divergence integral diagram

式(19)左边等价于计算图3 中编号为5 的B 样条基处的散度(其中圆圈代表B 样条基位置,实线方形表示子孔径区域,虚线方形表示B 样条基的积分区域),支撑域包含编号5 区域的B 样条基为1~9 号,对ΔBi(x,y)(i=1,2,…,9)的解析表达式在编号5 区域中积分,式(19)可改写为

改变成式(20)后,即可使用逐次超松驰迭代法(successive over relaxation method,SOR)进行求解[19]:

接下来计算∇⋅g。为方便描述,以图4 所示为1,2,3,4 表示4 个子孔径,令为子孔径x和y方向的斜率,为计算黑色圆点处的散度∇⋅g,在黑色圆点处对斜率进行1 阶Taylor 展开,可得:

进一步可得出:

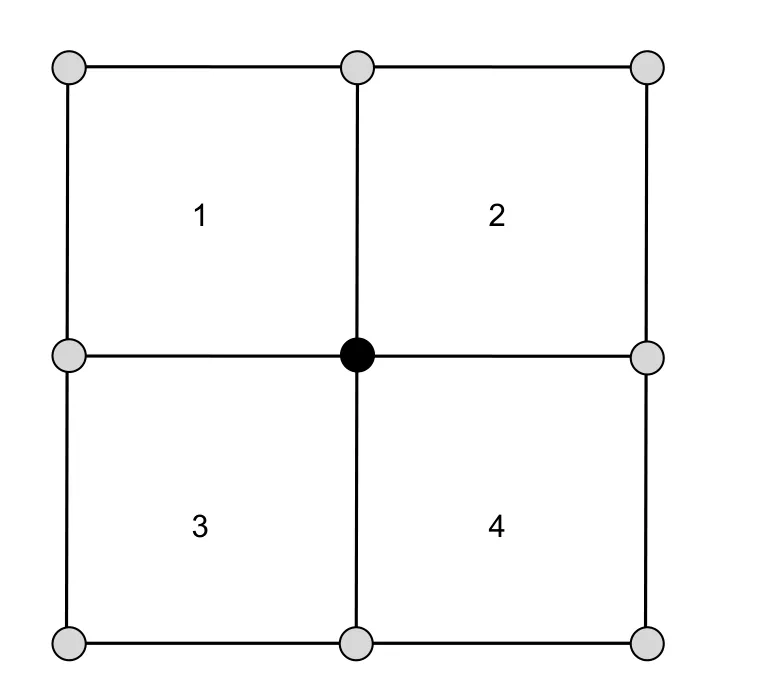
图4 散度近似计算示意图Fig.4 Diagram of divergence approximation
这样就可以通过子孔径的斜率估计出B 样条基处(黑色圆点)的散度。至此,式(19)中的必要元素已具备。通过求解式(19),则可得到所有B 样条基的系数,最后通过式(9)则可得到复原波前的解析式。
对于边界位置B 样条基,由于积分区域改变,式(20)会有所改变,以图3 中的1 号B 样条基为例:

而边界位置处的散度估计,可以通过对斜率的外拓来简化计算,可采用重复延拓或补0 延拓。
可见,基于泊松方程的2 阶B 样条快速重建算法,存储空间为(M+1)× (N+1),乘法需求量为(M+1)× (N+1)×L,其中L为迭代步数。一般而言,SOC 算法在迭代几十次左右后将收敛。因此相比广义逆求解,存储空间和计算量的需求减少了很多,特别当子孔径数目增大时,优势更明显。
4 实 验
本文利用自主研制的121 单元六边形排布的压电陶瓷变形镜,测量其中心位置处7 个驱动器(命名为1~7 号,正中心位置为4 号)的响应函数,分别通过干涉仪和哈特曼波前传感器采集数据,再通过不同的复原算法从哈特曼的数据中复原波前,并与干涉仪的数据进行对比。
为减少变形镜初始面型以及光学系统对测试结果的影响,每个驱动器分别加±80 V 后,对测量得到的波前进行对减。基准数据采用干涉仪(Zygo GPI-600)测量的结果,4 号驱动器的响应函数如图5 所示。
使用哈特曼测量时,将变形镜的光瞳口径缩束后与哈特曼波前传感器成3:4 匹配(即哈特曼波前传感器的有效探测区域为变形镜的75%),哈特曼波前传感器的微透镜阵列为方形排布,阵列数为22×22,子孔径大小为0.25 μm,焦距为9.52 mm(使用Yang 等提出方法标定[20]),测量波长为808 nm。
通过区域法、模式法和本文提出的复原算法(迭代次数取20 次)复原的波前和残差波前如图6 所示,为实现相同数字采样率,区域法的结果采用双线性插值方法进行处理。为实现对减,首先通过相关找到原始两个波面的位置偏移,区域法通过双线性插值重新生成与干涉仪位置一样的波前;模式法和本文提出的算法通过偏移后的坐标计算波前,考虑到模式法的边缘效应,仅计算单位圆域内的波前数据,而本文提出的算法仅计算样条内部的区域。4 号驱动器的复原波前和残差如图6 所示,相关系数、残差如表1 所示,所有驱动器的波前残差PV 值与RMS 值如图7 所示,对应的数值结果如表2 所示。
从与干涉仪对比的结果可知,由于Zernike 模式法的局限性,其对局部像差的复原能力较差,因此对这种驱动器产生的响应函数无法精确复原,复原残差很大。区域法和本文提出的方法均可以较好地复原这种局部像差。从复原的数值上看,本文的方法优于区域法,其原因在于:区域法采用双线性插值时会带来插值误差;区域法的抗噪能力有限,因此残差波前的PV 值显著大于本文提出的方法。另外,观察图6 中驱动器顶端复原的波前细节,可以看出,区域法在这个位置由于受采样误差和噪声的影响,未能复原出平滑的“峰”。

图5 4 号驱动器的干涉仪测量数据Fig.5 Measurement data of No.4 actuator obtained with ZYGO interferometer

图6 不同复原方法复原结果。(a) 本文算法重建波前;(b) 本文算法的残余波前;(c) 基于Zernike 多项式的模式法重建波前;(d) 模式法的残余波前;(e) Fried 区域法重建波前;(f) 区域法的残余波前Fig.6 Wavefronts restored by different methods.(a) Wavefront restored by our method;(b) Residual wavefront error of (a);(c) Wavefront restored by the modal method;(d) Residual wavefront error of (c);(e) Wavefront restored by the zonal method;(f) Residual wavefront error of (e)

表1 不同复原方法结果比较(4#驱动器)Table 1 Comparison results of different wavefront reconstruction methods

图7 不同驱动器复原残差Fig.7 PV and RMS results of residual wavefront reconstructed by different methods
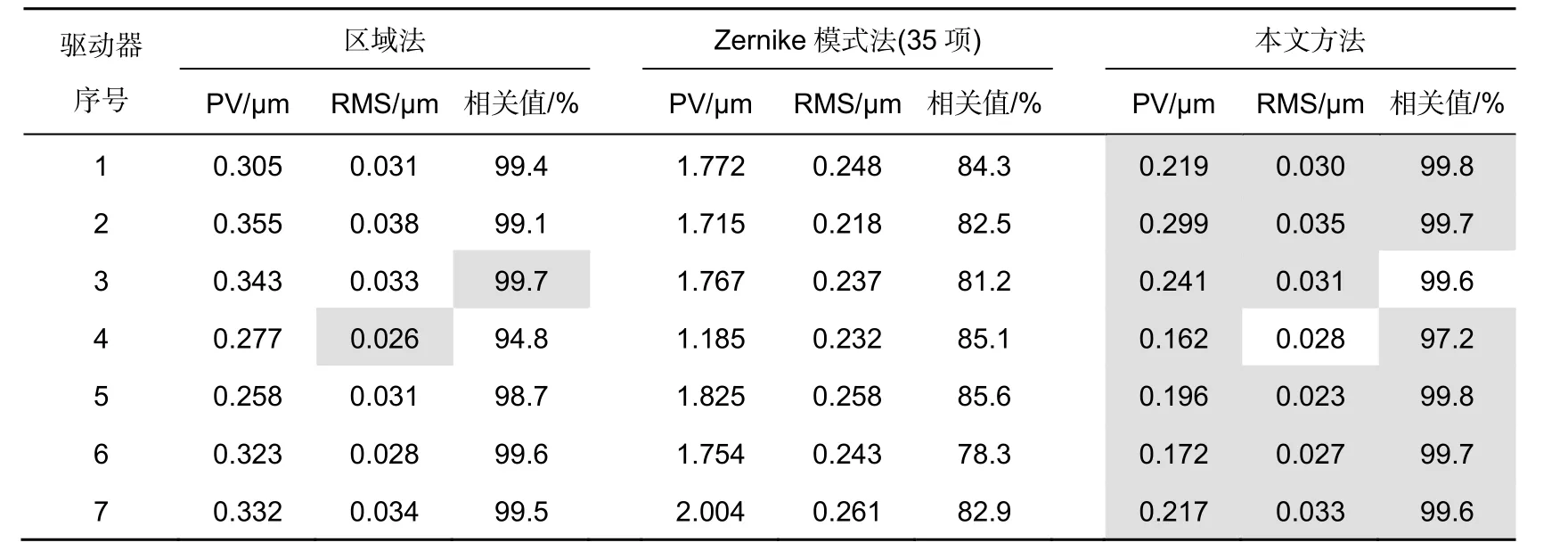
表2 不同驱动器复原残差及相关值Table 2 Residual reconstruction error and correlation values of different actuators
5 结 论
本文提出了一种基于2 阶B 样条快速波前复原算法,采用泊松方程改写斜率最小二乘方程,使其可以通过超松驰迭代法进行快速求解,大大降低了复原算法的存储空间需求和计算复杂度,容易在DSP 或FPGA 等硬件中实现,在子孔径数目增多时其优势更加明显,并且可以采用分块的超松驰迭代法等方法[21]提高算法的并行计算能力。该方法可以推广到其它斜率型波前传感器,如金字塔波前传感器[22],四波剪切干涉仪[23]等。
通过对变形镜驱动器响应波前的测量实验可以看出,模式法存在明显的局限性,无法精确复原局部像差,而本文提出的算法具有与区域法相当的局部像差复原能力,同时有优于后者的抗噪能力。由于复原的波前具有解析解,无需插值即可得到非常高的数值采样精度的波前信息,这使得复原波前更加平滑。
通过泊松方程改写的式(19),左侧为对样条函数的散度积分,右侧为利用斜率对散度的估计。因此,左侧可以扩展到不同阶次和不同扩展度的B 样条基,实现数值采样精度的灵活选取。而右侧根据式(23)中的处理方法,可以灵活选取计算散度的区域。一般来说,计算散度利用的斜率点越多,抗噪能力越强,对局部像差的复原能力越弱。因此,通过灵活选取计算散度的区域,可以有效平衡对局部区域像差的复原能力和抗噪能力需求。
猜你喜欢
疯狂英语·新悦读(2022年8期)2022-09-20
数学年刊A辑(中文版)(2022年1期)2022-08-20
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14
陶瓷学报(2020年6期)2021-01-26
紫禁城(2020年8期)2020-09-09
数学物理学报(2019年6期)2020-01-13
数学物理学报(2018年3期)2018-07-17
制造技术与机床(2017年7期)2018-01-19
软件(2017年6期)2017-09-23
计算机测量与控制(2017年6期)2017-07-01
