
介电润湿液体透镜仿生复眼的设计与仿真
2021-04-01 07:24孔梅梅关建飞梁忠诚
光电工程 2021年2期
赵 瑞,彭 超,张 凯,孔梅梅,陈 陶,关建飞,梁忠诚
南京邮电大学电子与光学工程学院微流控光学技术研究中心,江苏 南京 210023
1 引 言
自然界中昆虫复眼是天然存在的多孔径曲面光学系统,具有视场大、体积小、灵敏度高、对运动物体敏感,且能够实时对进行图像分析和处理等优点[1],因此,有关仿生复眼系统的研究引起了国内外科研工作者的广泛关注。随着科研人员的深入研究以及科技的发展,仿生复眼在照明系统[2-3]、工业检测[4]、自主导航[5]、医学[6]、安防设备[7-8]等领域都具有潜在的应用与发展。
2001 年Tanida[9-11]制备了基于分层式复眼结构的复眼成像系统(thin observation module by bound optics,TOMBO),通过引入隔离层解决透镜间干扰问题;2004 年Hornsey[12]研制了一种光纤束电子复眼,将每个子眼接收光线通过光纤传输到电荷耦合器件上,减少了相邻单元的串扰;2007 年Duparre[13]利用软光刻法将微透镜阵列和微孔阵列分别制作在一个凹透镜的凹面和凸透镜的凸面,有效地改善重影现象;2013 年,由瑞士等多个国家学者组成的研究团队[14]制作了一种基于仿生复眼的光机电系统(miniature curved artificial compound eyes,MCACE),其成像范围接近180°。然而,上述仿生复眼系统大多是采用固定焦距的子眼透镜阵列,一旦复眼系统的结构确定,系统的成像焦平面随之确定,即只能对景深范围内物体进行清晰成像,不利于对景深范围外目标物的探测和接收。为解决这一问题,有学者提出了可变焦仿生复眼系统。2015 年郝永平[15]设计了一种非球面变焦距的曲面复眼系统,该复眼系统可以在多个场景下成像;2017 年Shahini[16]提出了一种基于石墨烯电极的可调复眼,通过电润湿效应改变离子液体曲率,并通过施加压力来控制曲面基底曲率,实现自动变焦,透镜可调孔径范围2.4 mm~2.74 mm;2018 年郝群[17-18]提出了一种基于液体变焦透镜的仿生复眼系统,通过泵入液体达到改变液体透镜曲率的方法来调节焦距。2018 年中国科学院光电技术研究所[19]设计了一种多焦点仿生复眼光学系统,位于不同距离处的目标物将被具有不同焦距的子眼透镜所俘获,从而形成多景深成像功能。
本文设计了一种基于介电润湿液体透镜曲面阵列的仿生复眼光学系统,运用介电润湿液体透镜的自适应变焦能力,解决由于物体或者系统成像接收器移动造成的系统离焦像差;分析曲面基底的曲率半径及液体透镜子单元的尺寸对系统成像质量的影响,计算系统接收器可移动范围。相关研究将推动仿生复眼系统的应用发展,也为合理利用液体透镜提供理论依据。
2 仿生复眼结构设计与工作原理
基于液体透镜的仿生复眼光学系统主要由双液体透镜、曲面基底、光阑和平面探测器组成,如图1(a)所示。透镜曲面阵列均匀排布如图1(b)所示,分为4环(位于曲面基底正中心为第一环),环与环之间以及同一环子透镜尺寸相同且紧密相切排布,则每环子眼透镜的个数依次为1、6、12、18。文中曲面基底半径15 mm,子透镜直径为1 mm,高为1.6 mm,透镜腔体内上层液体选取0.01%KCL(n1=1.33)作为导电液体,下层液体选取十二烷与1-氯化萘的混合液体(n2=1.539)作为绝缘油液体。系统相关参数如表1 所示。
该仿生复眼系统的子眼透镜单元为基于介电润湿效应的双液体可变焦透镜,其结构如图1(c)所示。子透镜侧壁由外到内依次为腔体、绝缘层和疏水层。其中透镜的腔体和基底都采用导电PET(polyethylene terephthalate)材料,这种 PET 材料是涂覆有导电ITO(indium tin oxide)的柔性材料。绝缘层是通过在透镜腔体上蒸镀一定厚度的派瑞林(Parylene)来实现的,最后涂覆一层氟化聚合物作为疏水层。腔内为两种密度相同且折射率不同的液体组合,其中上层液体为导电液体,下层为绝缘液体。通过工作电压控制双液体界面曲率[20],根据Young-Lippman 方程[21],液体透镜焦距f′与工作电压U关系如下:

式中:θ0为导电液体与壁面的初始接触角,γ12为界面张力,d0为介电层厚度,ε0为真空介电常数,εr为相对介电常数,n1为导电液体的折射率,n2为绝缘液体折射率,D为液体透镜通光口径。从式(1)可以看出,液体透镜子眼单元焦距可调,通过控制工作电压,可以使得每个子眼透镜单元成像于同一接收平面上。该接收平面位置可根据实际需要进行调整,从而提高仿生复眼的实用价值。

图1 基于介电润湿液体透镜的仿生复眼系统设计原理。(a) 侧面图;(b) 透镜单元排列方式;(c) 透镜结构图;(d) 成像原理示意图Fig.1 Design principle of the bionic compound eye system based on electrowetting liquid lens.(a) Side view;(b) Lens units arrangement;(c) Lens unit structure diagram;(d) Schematic diagram of imaging principle

表1 仿生复眼的各项参数Table 1 Various parameters of bionic compound eye
图1(d)给出了仿生复眼系统的成像示意,物体经液体透镜曲面阵列成像在探测接收器上。当物距或像距发生移动时,光线聚焦位置将偏离探测器接收面,此时只需调整工作电压,改变子眼透镜焦距,使得光线重新聚焦于探测接收器上。由于液体透镜曲面阵列均匀排布,相邻液体透镜夹角(Δφ)相等,故可得第n环透镜主光轴与透镜阵列主光轴之间的夹角αn为


3 仿真分析与讨论

图2 不同视场情况下,不同曲率仿复眼系统的成像效果。(a) R1=10 mm,正入射;(b) R2=15 mm,正入射;(c) R3=20 mm,正入射;(d) R1=10 mm,视场角20°;(e) R2=15 mm,视场角20°;(f) R3=20 mm,视场角20°;(g) R1=10 mm,视场角35°;(h) R2=15 mm,视场角35°;(i) R3=20 mm,视场角35°Fig.2 Imaging effect of a compound eye system with different curvatures in different fields of view.(a) R1=10 mm,normal incidence;(b) R2=15 mm,normal incidence;(c) R3=20 mm,normal incidence;(d) R1=10 mm,field angle 20°;(e) R2=15 mm,field angle 20°;(f) R3=20 mm,field angle 20°;(g) R1=10 mm,field angle 35°;(h) R2=15 mm,field angle 35°;(i) R3=20 mm,field angle 35°
图2 给出了不同视场下目标物字母“F”经不同曲率仿复眼系统的成像情况。图2(a)~2(c)为正入射情况下,2(d)~2(f)为最外环透镜主光轴与透镜阵列主光轴之间的夹角α4=20°情况,2(g)~2(i)为最外环透镜主光轴与透镜阵列主光轴之间的夹角α4=35°情况,所有子透镜直径为2 mm,基底曲率半径分别为R1=10 mm、R2=15 mm 和R3=20 mm 对应的成像。从图中看出,在正入射的情况下,基底曲率半径越大,子眼透镜成像越清晰。当视场角增大,基底曲率半径越小,系统成像质量越好。这是因为在光学系统中,轴外光的成像质量比轴上光的成像质量差,且偏离主光轴越远,成像越模糊。在正入射时,基底曲率半径越大,各环子透镜的光轴与入射光的夹角越小,子透镜成像越清晰。当视场角逐渐增大,入射光线与各环子透镜光轴的夹角逐渐变大,成像质量逐渐变差。此时,若减小基底的曲率半径,可降低入射光与各环子透镜光轴的夹角,从而达到提高成像质量的目的。因此,在复眼透镜基底曲率半径的选取上,既要考虑正入射的情况,也要兼顾系统在不同视场角下的工作性能。

图3 不同直径透镜单元对复眼系统成像效果的影响Fig.3 The effects of different diameters of lens unit on the imaging effect of the compound eye system
图3 为不同子眼透镜尺寸复眼系统的成像效果,曲面基底的曲率半径和各子透镜位置保持不变,子眼透镜直径分别取1 mm、2 mm 和3 mm。从图中可以看出:当透镜直径增大至3 mm 时,第三环子眼透镜对应成像模糊不清。作者认为随着透镜尺寸变大,对应子眼透镜的F 数(F#=f′/D)降低,减小了焦深,从而增加了系统对离焦的敏感性。因此,在保证系统成像分辨率的前提下,尽可能减小子眼透镜尺寸。
图3 不同直径透镜单元对复眼系统成像效果的影响Fig.3 The effects of different diameters of lens unit on the imaging effect of the compound eye system
图4 分析了子眼透镜单元均匀性对系统成像质量的影响。图4(a)为非均匀子眼透镜组成阵列,其中第一环子眼透镜直径D为1 mm,从里往外每环依次增加0.2 mm,第6 环对应子眼透镜直径为2 mm;图4(b)为均匀子眼透镜单元组成阵列,每环透镜直径D均为1 mm,且每环子眼透镜中心线与非均匀透镜阵列相应的子眼单元中心线重合。调整每环液体透镜焦距,使其聚焦于成像探测器上。图4(c)和4(d)是分别对应图4(a)和4(b)系统的成像光斑图,从图中可以发现:相比于非均匀微透镜阵列,均匀微透镜子眼单元组成的曲面阵列可以明显降低系统的离焦像差。
在接收探测器位置固定情况下,当物距发生变化,通过控制工作电压调整子眼透镜单元焦距,可以使得像重新聚焦在接收探测面[22]。图5 给出子眼单元焦距变化前后对应系统成像情况对比,其中图5(a)是当物平面背向复眼阵列移动7 mm 时,此时系统实际成像位置偏离系统接收探测位置。图5(b)为通过调整子眼透镜单元焦距使得光线重新聚焦于接收探测器。图5(c)给出子眼透镜单元调焦前后,系统各环子眼透镜的均方根半径。从该图可以看出:通过控制工作电压调节子眼透镜的焦距,能够满足系统对不同景深物体成像的需求。
当物体固定不动时,由于子眼透镜焦距具有可调性,系统接收探测器位置也可以根据实际需要进行一定范围的调整。图6 给出了仿生复眼系统的成像接收器可移动范围,其中图6(a)为平行子眼透镜光轴光线,在曲面基底球心处会聚一点,此位置为成像接收平面的最大位置,距离基底最高位置为15 mm;调节液体透镜工作电压,改变液体透镜单元的焦距,使得光线汇聚到图6(b)所示的接收探测器位置,此时液体透镜接触角已经达到饱和状态[23],对应探测器位置为最小位置,距离基底是1.9 mm。该系统的接收探测器位置变化范围为1.9 mm~15 mm。

图4 透镜单元均匀性对仿复眼系统成像性能的影响Fig.4 Effect of lens unit uniformity on imaging performance of a compound eye system
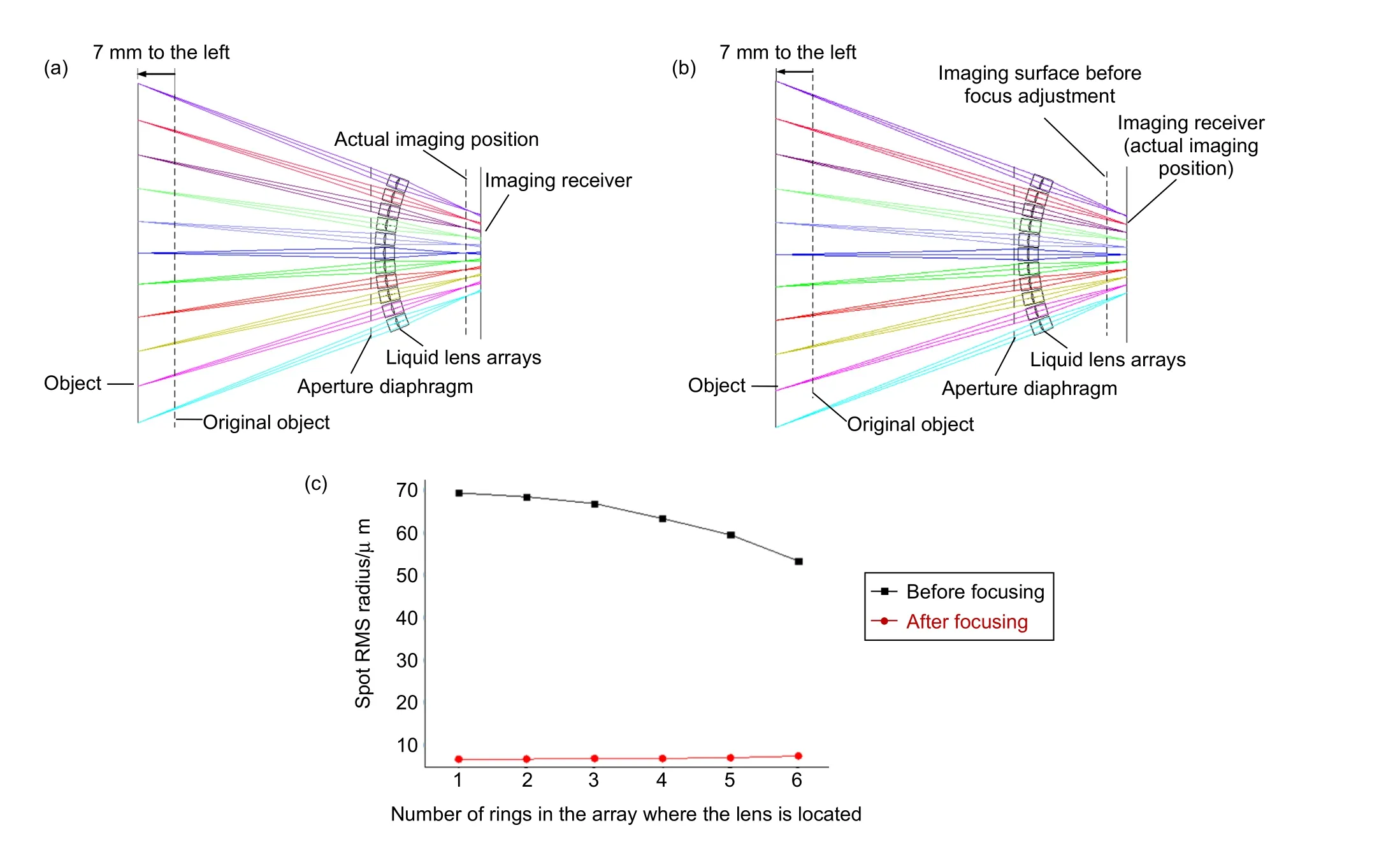
图5 仿生复眼系统对物距变化的自适应性。(a) 调焦前,成像面偏离接收器;(b) 调焦后,成像面再次回到接收器位置;(c) 调焦前后各环透镜均方根半径Fig.5 The adaptability of the bionic compound eye system to the changes in the object distance.(a) Before focusing,the imaging surface deviates from the receiver;(b) After focusing,the imaging surface returns to the receiver position again;(c) RMS of each ring lens before and after focusing

图6 仿生复眼系统的成像接收面的接收范围。(a) 最远接收位置;(b) 最近接收位置Fig.6 Reception range of the imaging receiving surface of the bionic compound eye system.(a) Furthest receiving position;(b) Nearest receiving position
4 结 论
设计了一种基于介电润湿液体透镜曲面阵列的仿生复眼光学系统,介绍了系统结构和工作原理,推导了成像位置与电压的关系,分析了曲面基底曲率半径、子眼液体透镜尺寸及均匀性对成像质量的影响,计算了系统的自适应调焦能力和相应的像面可调整范围。结果表明:系统成像视场角随着曲面基底曲率的增大而增大;相比于非均匀透镜阵列,均匀子眼透镜阵列可以有效地较低边缘透镜的成像像差;适当减小子透镜单元尺寸,可以达到降低边缘透镜离焦像差的目的;该仿生复眼系统可以实现自适应变焦,解决由于物距和像距变化引起的系统离焦像差问题。该尺寸复眼透镜阵列像平面可移动范围为1.9 mm~15 mm。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
摄影与摄像(2021年12期)2021-10-01
科学技术创新(2021年25期)2021-09-11
艺术品鉴(2021年21期)2021-08-15
锦绣·上旬刊(2020年3期)2020-06-08
中国医疗设备(2019年1期)2019-01-15
