
多源遥感数据的道路提取技术研究现状及展望
2021-03-25 12:23:26贾建鑫孙海彬蒋长辉王跃明王廷槐陈劲松陈育伟
光学精密工程 2021年2期
贾建鑫,孙海彬,蒋长辉,王跃明,王廷槐,陈劲松,陈育伟*
(1.中国科学院深圳先进技术研究院空间信息研究中心,广东深圳518055;2.中国科学院上海技术物理研究所中国科学院智能红外感知重点实验室,上海200083;3.芬兰地球空间研究所摄影测量与遥感部,基尔科努米FI-02430;4.中国科学院上海技术物理研究所中国科学院空间主动光电技术重点实验室,上海200083;5.华为赫尔辛基研究院,赫尔辛基FI-00180)
1 引 言
遥感图像道路提取既是土地利用检测[1]、地理信息系统更新[2]、自然灾害预警[1]、军事打击[3]等传统行业应用的必要步骤,又是数字城市[3]、智能交通[4]等支撑传统基础设施转型,进而形成融合基础设施的新基建领域中关键技术之一。目前用于道路提取的遥感数据主要包括高空间分辨率图像、多光谱/高光谱图像、SAR(Synthetic Aperture Radar)图像和激光/点云图像,每种遥感图像道路提取技术都有各自的特点和优势。近年来,随着高光谱成像系统仪器水平的提升,其在道路信息提取方面的应用效果逐渐提升,并在路面材料识别、路况检测等方面凸显出巨大的潜力。
本文首先介绍了基于四种遥感数据源道路提取技术的发展现状,对不同遥感图像道路提取技术的特点进行了分析和探讨,然后回顾了高光谱成像技术的发展,列举并分析了航天、航空和无人机不同平台的高光谱数据在道路提取方面的应用现状,最后对本文的内容进行了总结和展望。
2 道路提取技术的现状分析
目前用于道路提取的主要遥感数据有高空间分辨率图像、多光谱/高光谱图像、SAR图像和激光/点云图像,其技术特点和应用举例如表1所示,下面分别结合每种遥感技术的特点对道路提取的发展现状展开介绍。
高空间分辨率图像(简称高分图像)包含了地物丰富的纹理、形状、结构、邻域关系等信息,成为一种重要的地理信息数据源。道路作为地物信息的重要组成部分,利用高空间分辨率遥感影像提取道路信息建立城市道路网结构,是高分图像处理中最重要也是最困难的技术之一。高分图像的道路提取首先需要明确道路的特征信息,包括道路的辐射特征、几何特征、拓扑特征、上下文特征等。通过对道路信息的分析,首先提取图像中的特点、纹理及边缘等各种要素信息,结合道路特征信息,对提取的图像信息进行综合分析、选择和重组,与道路要素的结构关系、模型及与道路有关的规则信息进行融合,提取道路信息识别道路[5]。随着低空无人机技术的发展,遥感图像的分辨率已由亚米级提高到厘米级[6-7],影像中地物的细节更加丰富,遥感影像将呈现出过多的纹理和细节信息,且噪声干扰更加严重,增加了道路信息提取的难度。许多在中分辨率图像中相对成熟的目标提取算法很难应用于高分辨率图像道路信息提取,亟需探索应用于超高分辨率图像的智能道路信息提取算法。
多光谱遥感图像因其具有较高的空间分辨率和少量光谱特征已被广泛地应用于道路信息提取。常用的数据源主要是卫星多光谱图像,包括Quickbird,Ikonos[8-10],Wordview系列[11],Landsat系列卫星[12]以及我国的高分一、二号卫星等。高光谱遥感图像因其波段数量多(一般几百个波段)、谱段连续等特点,不仅被用于常规的道路提取,而且在路况条件检测、路面材料识别、路面坑槽、裂缝缺陷检测等方面展示出较大的应用潜力。航天、航空以及无人机不同平台的高光谱成像系统在道路提取、识别的应用范围和特点也不相同。目前航天、航空平台的高光谱仪器由于空间分辨率的不足,在路面坑槽、裂缝缺陷等方面的精度还不是很高,未来随着仪器水平的提高以及光谱、纹理结合使用等算法的发展,高光谱遥感图像在道路提取、检测等方面的应用优势将愈加凸显。
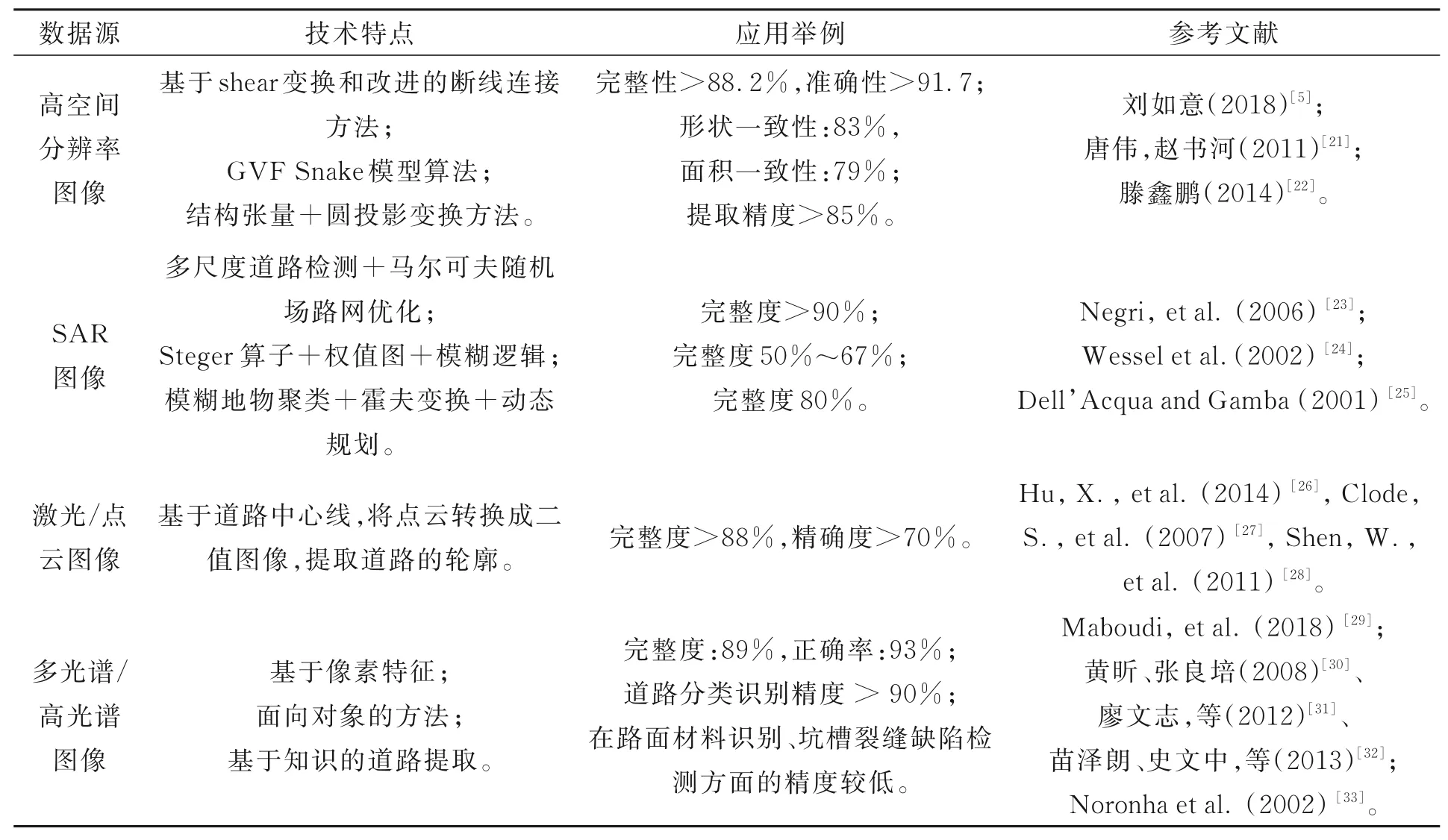
表1 基于四种遥感图像的道路信息提取技术特点和应用举例Tab.1 Characteristics and application examples of road information extraction based on four remote sensing technology
从遥感图像里提取道路是制图学中最重要的应用之一,早在上个世纪七十年代,就有人开始尝试将这种繁重的手工任务改进成为自动化处理[13]。毫无疑问,路网提取通常使用的方法是使用正下方观测的航空照片,但是星载SAR,由于其全天候的覆盖能力和高效的覆盖范围,很早就被尝试用于路网提取。星载高空间分辨率的合成孔径雷达,可以有效提供约1 m分辨率的地面影像,对于相关的地物提取,提供了一种经济、有效、且鲁棒性好(穿透云雾)的空间观测手段。与低分辨率SAR图像不同,通过高空间分辨率SAR图像提取道路,像素间的语义信息变得非常重要,道路检测从直线/边缘检测变成了地物检测,需要充分利用道路目标的各种特征。
LiDAR(Light Detection and Ranging)通过主动发射激光脉冲来获取目标的三维坐标信息,具有精度高、速度快等优点,并且不受环境光照变化等环境因素的影响,已经发展成为一种快速和高效的高精度、高密度数据采集技术,这项技术的出现为城市道路的提取提供了一种全新的手段。目前,随着机载LiDAR技术的兴起,更多的学者以高分辨率的数码影像与LiDAR点云融合的联合使用方式来提取城市的道路网[14]。基于机载LiDAR点云的城市道路提取通常包含点云预处理、点云滤波、道路点云提取和城市道路网提取几个步骤或者处理流程[15-17]。
不同的遥感数据具有自身的特点,将多种遥感数据结合应用于道路提取,发挥各自的优势,一直以来都是众多研究者关注的热点。罗庆州等[18]以SPOT卫星影像为例,将高空间分辨率的全色图像与多光谱图像融合使用。首先基于道路光谱特征进行图像分类,然后再应用道路的形状特征去除分类图像中的“异物”目标,该方法能有效地从遥感影像中提取主干道路。曹广真、金亚秋[19]提出了一种将多光谱遥感图像和雷达遥感图像进行特征融合,实现城区道路半自动提取的方法。雷达图像中的道路信息弥补了多光谱图像中城市道路受高大建筑物、植被等地物阴影的覆盖而使图像容易断裂的缺点,而多光谱图像的道路信息则有助于降低雷达图像中噪声的干扰以及线性水体与道路的混淆。该方法分别用于上海市不同区域、不同分辨率、不同极化方式的卫星遥感雷达图像(ERS-2,Radarsat-1 SAR)与陆地卫星多光谱图像(Landsat ETM+)的融合,进行道路信息的提取,取得了较好的效果。曾妮红等[20]针对单一遥感数据源提取道路信息中存在的问题,采用面向对象的思想,提出一种融合机载激光雷达和航空正射影像,运用对象平均强度指数进行道路精确提取的方法。该方法提取流程简单快速、无须精确配准、道路提取精度较高。
3 不同遥感数据道路提取的主要方法
3.1 高空间分辨率图像的道路提取方法
早在20世纪70年代,中、低分辨率的遥感影像就被用来提取道路信息,历经50年探索和积累,国内外学者提出了许多有价值的模型和方法。但在此过程中,遥感影像的空间分辨率极大提升,使传统的道路信息提取模型和方法的效果大幅度下降[34-35]。高分辨率遥感图像道路提取的难度受到道路信息差异大、噪声多样等影响。以乡村道路和城市道路为例:图像中的乡村道路具有密度低、交叉点少、田地和森林覆盖范围大等特点,这决定了乡村道路辐射特征与其他地物差异大,因此利用辐射特征进行提取较好;而城市路面宽广、辐射特征接近、边缘清晰、纹理丰富,反而不利于采用辐射特征提取道路信息。高分辨率图像中道路的噪声较多,典型的如薄雾噪声,此类噪声目视相对容易识别,但计算机识别难度极大[36]。
现阶段,在众多高分辨率图像道路提取算法中,根据提取道路的自动化程度,道路提取方法分为半自动和自动两大类。半自动提取根据人工提供道路的初始点或初始方向,利用特定的跟踪方法或曲线拟合模型提取道路信息,主要算法包括:边缘跟踪法[37]、Snake模型算法[38]、影像分割法[39-40]、动态规划法[41]、模板匹配[42]。半自动化提取方法的特点是一般适用于中低分辨率的遥感影像,而不太适用于高分辨率的遥感影像。自动道路提取则是综合运用道路拓扑特征、上下文特征等多方面的特征信息,利用模式识别、计算机视觉、人工智能与影像理解等手段,提取和识别道路信息。比较具有代表性的道路自动提取方法有基于平行线对算法、基于窗口模型的道路提取算法、直线条带提取法、脊线探测法等[43]。自动化道路提取的优点是不需要过多的人工干预,智能化程度较高,但受限于现阶段人工智能水平和相关算法的成熟度,自动化道路提取算法仍没有十分成熟的模型,一直是高分图像信息提取领域研究的重点。
3.2 多光谱/高光谱图像的道路提取方法
目前多光谱/高光谱图像的道路提取方法很多来自于高空间分辨率图像的道路提取方法,不过图像数据的维数增加,尤其是高光谱图像加入了大量的光谱特征。根据算法的自动化程度也可以分为半自动和自动化提取两大类,半自动提取需要人工指定种子点或者设置道路的起始点,自动化提取则没有人为的主观干预,由计算机自动实现道路的提取[37,44-46]。将包含丰富光谱特征的高光谱图像和高分辨率图像结合使用,为实现道路的高精度自动化提取带来了希望。
道路在遥感影像上具有一定的图像特征,包括辐射特征、几何特征、拓扑特征和上下文特征(背景特征)[47]。根据提取过程中使用的特征层次,光谱遥感影像道路提取又可以分为基于像素特征、面向对象和基于知识的道路提取三类。常用的基于像素特征的方法根据使用的特征不同,可以分为模板匹配[48]、边缘检测[49]和形态学方法[50]。基于对象的道路提取一般是采用分割或区域增长的方法,先将影像分为不同的图斑[51-52],再按照制定的规则对图斑进行筛选、连接、细化、组织,最后构成网络[53-54]。近年来逐渐兴起并迅速发展的张量投票[12]、机器学习[55]和深度学习[56]属于基于知识的道路提取方法。随着相关技术的发展,近年来基于深度学习的信息提取方法逐渐被应用于高光谱图像分类中[57-58],并在高光谱图像的道路提取和路面检测中有了新的突破[59]。每种道路提取方法都有自己的特点和优势,基于像素的道路提取方法处理较简单,但不能充分利用影像中的信息。面向对象方法优点在于影像分割能够有效地解决高分辨率影像中的噪声问题,将噪声的部分与周围的像元合并后划分到特定的影像对象中。但该方法的缺点在于提取效果很大程度上取决于影像分割结果的质量[60]。基于知识的道路提取如深度学习方法,良好的道路特征表达能力提高了道路提取的精度,但模型复杂、训练难、对海量样本及对较高计算能力硬件的依赖影响了利用深度学习提取道路方法的大范围推广应用。所以在实际应用中,需要根据使用遥感数据集自身的特点和影像中道路的特征情况,选择合适的提取方法。
3.3 SAR图像的道路提取方法
基于SAR图像的道路提取方法主要是以1990年Samadani等提出的先局部边缘检测后全局道路连接的方法为基础[61],随后研究人员在速度、精度和普适性方面进行了改进和创新。局部检测按照图像分辨率大小,分为中低分辨率和高分辨率SAR图像局部检测两大类;在全局道路连接中,按照自动化的程度分为自动和半自动化两类。程江华、周岳勇等[62-63]对不同分类方法的特点进行了较详细的总结,本文不再重复叙述。
一般来说,基于SAR图像的路网提取常常采用层进式手段,首先对于局部原始地物进行图像分割,比如提取直线特征,然后在全局范围内,通过语义的知识,将提取出来的线段连接成为网络。对于农村地区的路网提取,往往首先将森林和乡镇地物进行排除后,再进行路网提取。对于城市场景,由于受到遮挡和路旁建筑、树木的地物叠置效应,通常采用多角度观测SAR影像,来缓解沿轨方向的道路无法观测的情况。
对于传统低分辨率的SAR图像,常用的方法是利用一个局部的准则来评估目标像素和邻近小区域的辐射特征,将背景中的直线特征提取出来[64]。局部的准则主要是将道路和周围环境的边界提取出来,这些提取出来的局部的分段,通过一些全局的待检结构知识,最终连接成网络。与低分辨率SAR图像不同,在高空间分辨率SAR图像提取道路中,像素间的语义信息变得非常重要,道路检测从直线/边缘检测变成了地物检测,需要充分利用道路目标的各种特征。比如Huber和Lang[65]就提出一种道路检测方法,联合考虑了道路侧缘存在和道路中心的连续性。有意思的是,这些方法主要通过从SAR图像中提取符合道路的几何/结构语义内容,区域的反射特性往往被忽略和低估。与此相反,反射特征在F.Dell’Acqua[25,66]的研究中则被考虑,通过提出的分类器将辨识为道路的像素进行聚类。也有科学家通过使用改进的霍夫变换将聚类为道路的像素转换为直线或者曲线的分段,分段方法抛弃了反射均匀的区域,而在失去统计均匀性的区域进行边缘提取[67]。显而易见的是,如果采用线性或者曲线检测的方法,只是部分使用了高分辨率SAR图像的信息,而道路可以作为具备独特统计特征的图像分段,这一独特的统计特征可以通过分类进行研究。如Lisini[68]提出了一种用于城市场景下道路提取的方法,该方法在特征层面融合了基于统计信息的分类结果和线性结构信息的检测结果,来提高提取道路的数量和改善结果的相似性。
3.4 激光/点云图像的道路提取方法
基于机载LiDAR点云的城市道路提取通常包含点云预处理、点云滤波、道路点云提取和城市道路网提取四个处理流程。(1)由于扫描方式的不同,原始的点云数据一般都是离散分布,比较散乱,同时由于地物的复杂性,可能存在数据缺失,需要对其进行有效的组织和去噪。点云常用的组织方法有不规则三角网、KD树和规格格网等[69-71]。由于外界因素的影响或者仪器本身的原因,点云数据会存在一些噪声,常用的去燥方法包括基于形态学运算的点云去噪算法、基于内插拟合方法的噪声点云去除方法等[72-75]。(2)机载点云中,包含了大量物体的点云信息,不仅仅是地面点云信息,还包括车辆、树木、行人等,在提取道路信息之前,需要将点云进行分割,提取有效的点云信息。主要有数学形态学方法、不规则三角网方法、曲面拟合方法、聚类分割方法等[76-79]。(3)完成非地面点云去除之后,需要从地面点云中提取道路点云。通常道路点云提取方法都是基于道路点云的以下特点。道路一般比较平坦,高程变化小;道路点云的回波强度值具有一定的一致性。通过高程变化和强度值约束提取道路点云。常用的方法有层次分类法、不规则三角网TIN法等。Clode[27]提出一种层次分类法,在利用道路点云高程变化和强度值约束的基础上,引入邻域点云密度的辅助分类地面点云和非地面点云。(4)获得道路点云之后,最后进行路网的提取,一般有两种途径,提取道路中心线或者提取道路轮廓。提取中心线方法主要有聚类分析法、数字形态法、多步长匹配方法等[26,80]。在轮廓提取方法方面,主要有动态轮廓法、a-shape方法、几何特征法等[28,81-82]。其中动态轮廓法借鉴图像处理中的边界提取方法,a-shape直接处理点云数据,通过设置不同的a可以高精度的提取边界。
4 高光谱成像技术的道路提取应用现状
近年来,随着技术的发展和仪器水平的提升,航天、航空以及无人机等不同平台的高光谱成像仪在道路提取、路面检测等方面均有应用。由于平台自身和仪器的特点,不同平台的高光谱仪器在道路应用的范围和效果也存在着差异。
星载高光谱成像仪可以实现较大的幅宽且平台的稳定性较好,适用于大面积作业,但仪器的空间分辨率较低,而且离地面距离较远受到大气的影响较多,主要用于道路主干道如高速公路的识别和提取。目前用于道路提取的星载高光谱仪器主要是美国EO-1卫星的Hyperion高光谱成像仪。Sun利用EO-1 Hyperion卫星高光谱数据,通过道路查找、道路跟踪和道路连接三个步骤完成了影像的路网提取,在道路查找的过程中采用了图像中的光谱信息来寻找道路特征,并且定性比较了几种不同的道路特征提取方法,但没有给出定量的提取精度结果[83]。由于卫星高光谱图像数据较少,获取成本较高,目前用于道路提取的公开报道不多。我国在2018年发射的“高分五号”卫星搭载的高光谱成像仪,其综合性能指标高于Hyperion,在道路提取方面的应用值得期待。
机载高光谱成像仪相比卫星平台的载荷而言可以获取较高的空间、光谱分辨率,但其作业效率不如星载仪器,主要用于城市道路的提取和路况条件的检测等。目前用于道路提取的机载高光谱仪器主要有AVIRIS,CASI,HyMap,HYDICE,AsiaFenix[84]等。2001年Gardner等[85]利用AVIRIS在美国圣巴巴拉市的高光谱数据集,通过多端元光谱分析的方法绘制城市表面典型地物种类,然后利用Q-tree滤波器将使用同种材料、光谱曲线相似的屋顶和道路区分开,从目视结果上看基本能提取影像中的主要道路,但是对于被植被遮挡的道路提取和路网连通性方面还有欠缺;Noronha等[32]利用AVIRIS的城市高光谱数据集,结合野外采集的基于城市主要地物表面材料的光谱数据库,开展了提取道路中心线、测路面状况和城市土地利用类型的最佳多光谱仪器设计三方面的研究。但其道路提取效果不是很高,总体分类精度约为73.5%,Kappa系数约为72.5%;黄昕、张良培[30]基于HYDICE和HyMAP机载高光谱图像数据,利用自适应mean-shift分析方法对图像中道路、房屋、草地等六类主要城市地物进行了精确分类,总体分类精度在97%以上,其中道路分类精度在95%以上;Resende等[86]利用CASI-1500机载高光谱数据,研究了城市中沥青道路的提取,通过ISODATA非监督分类和最大似然监督分类定性显示出该高光谱图像可以提取出城市中的主要沥青道路,但没有给出具体的提取精度;2012年Mohammadi[87]利用HyMap机载高光谱图像数据,研究了城市道路中使用材料的分类和沥青路况状态,主要区分了沥青道路、水泥路和碎石路,并在此基础上区分了沥青道路中良好、中等和较差三种路况状态。但是实验结果受到数据集空间分辨率的限制,且其中仍有大量的未分类像素,需要做进一步的研究来改进所采用的方法,从而减少未分类像素的数量。目前一些公开的机载高光谱数据集,如Pavia center,University Area,Indian Pine高光谱数据集也被用于道路分类、识别等方面的研究[88]。2012年廖文志等[31]提出了采用方向形态学和半监督特征提取的方法,对三个高光谱数据集进行了分类研究,其道路的分类精度最高可以达到97%以上,但分类精度和训练样本数、提取的特征数有密切关系;苗泽朗、史文中等[32]研究了基于形状特征和多元自适应回归样条的高分辨率图像的道路中心线提取,该方法结合形状特征和光谱信息从高分辨率遥感影像中提取道路段,然后利用多变量自适应回归样条函数提取道路中心线,将此方法应用于Pavia center高光谱数据集,道路中心线的提取正确率高达99%。由于该方法基于均匀表面性质,因此适合高分辨率图像,而不适用于低分辨率图像。另外该方法的主要限制是必须手动确定方法中的阈值。
除了卫星和航空高光谱载荷,近年来逐渐兴起的无人机高光谱成像系统因其成本低、分辨率指标高等特点越来越受到关注,可以应用于特定区域的路况检测、路面材料识别等[59,89]。但由于飞行高度较低,其作业效率不如航空和卫星平台的仪器,尤其是对于一般的民用无人机,搭上高光谱成像系统后,单块电池的作业时间通常不足半小时,这也是目前限制其应用和发展的主要原因。
高光谱图像数据预处理水平的高低决定了其应用效果的好坏,在道路信息提取方面亦是如此。高光谱图像的预处理主要包括辐射定标、光谱定标、几何纠正和大气校正等。对于道路识别等定性方面的应用,需要做好几何纠正和相对辐射定标,而对于路面材料识别等定量方面的应用,还需要高精度的绝对辐射定标、光谱定标和大气校正。目前,较好的机载高光谱成像仪的绝对辐射定标精度可以做到2%~5%,光谱定标精度优于0.5 nm,几何纠正精度优于1个像元,大气校正精度一般是7%以内,公开报道大气校正精度最高的(1%)是美国JPL实验室的AVIRISNG仪器[90]。星载高光谱成像仪相对于机载仪器而言仪器平台比较稳定,但因距离较远,受大气影响比较严重,如我国高分五号卫星搭载的可见短波红外高光谱成像仪,其绝对辐射定标精度优于5%,可见模块的光谱定标精度为0.39 nm,短波红外为0.65 nm[91]。
5 总结与展望
高分辨率成像、多光谱/高光谱成像、激光/点云成像和SAR成像是目前道路信息提取的主要遥感技术手段。高光谱成像技术因其图谱合一、谱段连续等特点在道路提取方面已经取得了较大的成果,在路况检测、路面材料识别方面也展现出巨大的潜力,现将本文的内容总结和展望如下:
(1)不同的遥感数据源具有各自的特点,如高分辨率图像的空间分辨率高并包含了地物丰富的纹理、形状、结构、邻域关系等信息,多光谱/高光谱图像的数据维数多且光谱特征丰富,SAR成像和激光/点云成像受云雾、光照等外部环境因素的影响较小,具有全天候工作的优势。将不同的遥感数据结合使用,发挥各自的优势,是目前和未来道路信息提取的一个重要发展方向。
(2)目前卫星高光谱数据相对较少,主要用于图像中道路主干道的提取,机载高光谱数据相对较多,在城市道路提取、识别、路面检测等方面均有较多的研究并取得了较高的道路提取精度,近年来逐渐兴起的无人机高光谱成像系统主要用于路面材料的识别。未来需要结合不同平台系统的高光谱数据源的特点,根据自己的实际需求选择合适的数据源。
(3)想要进一步提升高光谱成像技术在路况检测、路面材料识别等方面的应用效果,需要发挥高光谱成像作为“定量遥感”技术的优势。一方面需要进一步提高其仪器性能,如与路面裂缝检测密切相关的空间分辨率的指标,另一方面需要提高辐射定标、几何校正和大气校正等预处理的精度。机器学习、深度学习等技术的发展为高光谱道路提取带来了新的活力,但在发展算法模型的同时需要结合高光谱数据的特点,提升算法的泛化能力和运行效率。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:58
当代陕西(2022年4期)2022-04-19 12:08:50
小猕猴学习画刊(2022年3期)2022-03-28 16:33:01
青年歌声(2020年12期)2020-12-23 06:30:00
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
中国光学(2015年5期)2015-12-09 09:00:28
读写算·高年级(2015年1期)2015-07-25 02:22:00
