新型克隆挑取机器人设计与实验研究
2021-03-18 07:52朱伟赵文亮何凯
合成生物学 2021年1期
朱伟,赵文亮,何凯
(1 中国科学院深圳先进技术研究院,深圳市精密工程重点实验室,广东 深圳 518055;2中国科学院深圳先进技术研究院,粤港澳人机智能协同系统联合实验室 广东 深圳 518055)
生物技术是应用生物学、化学和工程学的基本原理,使用生物体(包括微生物、动物细胞和植物细胞)或其成分(细胞器和酶)来改进产品、改良植物和动物,或基于特殊用途而培养微生物的技术[1-5]。随着现代生物技术的飞速发展,基因工程、细胞工程、蛋白质工程、酶工程以及生化工程所取得的成果被广泛应用于医药、农业、环保、轻化工等重要领域。
在现代生物技术迅速发展的进程中,基因工程是现代生物工程技术的核心,其最突出的优点是打破了物种之间常规育种的界限,原核生物与真核生物之间、动物与植物之间,甚至人与其他生物之间的遗传信息得以重组和转移[6-8]。在整个基因工程技术操作流程中,对外源目标基因的分离、克隆以及对目标基因的结构和功能的研究构成了下游基因工程常规操作的基础,例如重组目标基因表达的结构和引入外源基因[9-10]。其中克隆挑取环节工作量很大,一个工业微生物改造项目通常需要挑取数万个菌落,传统的人工挑取效率相对较低,操作者很容易遗漏目标菌落或主观选择判断,从而降低了实验项目的客观性和科学性,使用机器人来代替人工克隆挑取操作已成为主流发展趋势[11]。
欧美国家在生物图像识别处理和计算运动控制方面具有较深入的研究,对克隆挑取机器人的研制起步较早。1990 年美国加利福尼亚州立大学Lawrence Berkeley 实验室结合图像识别处理系统,采用带有12 个挑针的转轮完成了150 菌落/时的快速挑取[12]。1992 年英国MRC Laboratory of Molecular Biology 研制出同时具有菌落挑取和微孔板移动功能的克隆挑取系统,挑取速度为853 菌落/时[13]。2009 年美国亚利桑那州立大学工程实验室采用12 挑针的旋转轮,配备三个直线运动轴,挑取速度达1200菌落/时[14]。随着克隆挑取技术的不断发展,一些大型生物医疗器械公司也开始涉足此方面的研究,其中国际市场成熟产品占有率比较高的有瑞士TECAN 公司研制的Freedom EVO工作站(包含克隆挑取功能)、英国KBiosyetems公司开发的K 系列挑取机器人、美国Hudson Robotic 公司开发的Rapid Pick 系列和Molecular Devices 公司开发的Qpix 系列菌落挑选机器人,最大挑取速度超过3000菌落/时[15-17]。
我国在该方面的研究较晚,相比国外相应研究成果较少,与国外同类型仪器仍有较大差距。2003 年北京机械工业自动化研究所研制了包含96个挑针的挑取头和8通道的微量移液系统,可以实现克隆挑取和自动分液的功能,仍处于实验室研究阶段[18-19]。本文基于国外传统克隆挑取机器人永久式金属针头挑取方案具有挑取效率低、消毒不彻底、制造成本高等缺点进行了改造,提出采用一次性挑针挑取菌落以提高工作效率及挑取结果科学性的方案。
1 系统结构基本原理
克隆菌落挑取机器人主要是由视觉、控制和执行三个系统构成。视觉系统主要是将培养皿中菌落转换成图像数字信号,然后通过图像信号的处理,识别出目标菌落[20-22]。控制策略是对已经识别出的菌落进行坐标转换,将目标菌落的图像坐标转换成世界坐标,然后对菌落挑取路径进行优化,完成目标菌落的挑取排序。执行系统主要是根据识别出的菌落坐标,控制器控制执行机构完成挑针挑取任务,然后接种到96孔板中[23-25]。图1为克隆挑取设备完成单个克隆挑取所经历的过程。
克隆挑取机器人当前的技术路线是使用图像处理和机器视觉技术来完成目标菌落的图像采集和定位,安装在机械臂上的针状金属头用于将目标菌落挑取到96 孔板中,然后使用蒸馏水、医用酒精和加热器分别对挑针进行清洗、消毒和高温灭菌[26-29]。但是目前传统技术路线具有以下缺点:
(1)现有的克隆挑取机器人采用的永久性金属针头要求较高的加工精度,制造成本相应有所提高;
(2)由于金属针头在工作过程中清洗消毒后循环使用,工作过程中可能存在消毒不彻底的因素,降低了实验结果的可靠性和科学性;
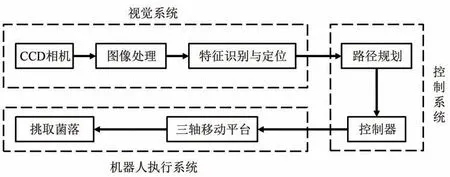
图1 克隆挑取设备单个克隆挑取经历过程Fig.1 Single clone-selecting process
(3)由于金属针头每次循环过程中都需要高温消毒,增加了能量消耗和单位挑取时间。
基于上述缺点本文改进了挑选的方法,提出了一种使用一次性竹签式针头进行菌落挑选的方式,有效地解决了传统主流技术存在的上述问题:
(1)竹签式针头为木质材料,制造成本比较低,其直径大约是金属针头5倍左右,其要求的装配精度也相对较低;
(2)竹签式针头只用一次后就更换新的针头,从根源上消除了传统金属针头消毒不彻底的问题;
(3)由于竹签式自动菌落挑选仪针头是一次性的,对挑针预先经过批量高温灭菌处理后即可投入使用,从而节省了每次循环的能量消耗和消毒时间。
针头传送机构和针头夹取及点样机构相对其他机构精度要求不高,且需要短时间内大行程运动,故这两个机构优先选用气缸驱动。由于在挑取过程中针头夹取及点样机构随转盘驱动机构转动,为防止气管之间缠绕选用了气动旋转接头来解决此问题。图2 全面展示了机器人的5 部分主要机构,各机构关系如图3所示。
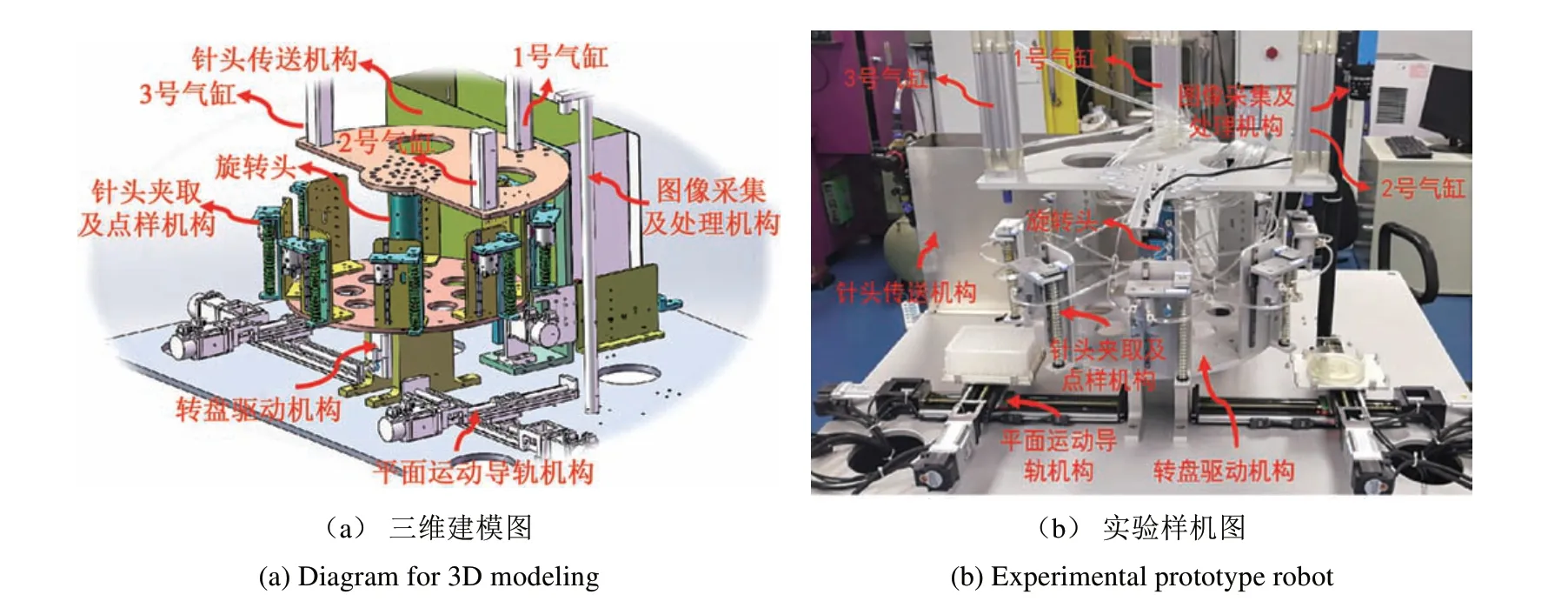
图2 克隆挑取机器人基本结构Fig.2 Basic structure of the clone-selecting robot
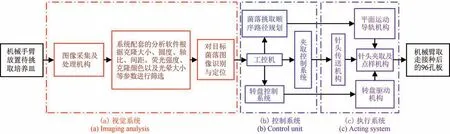
图3 各构件及系统关系图Fig.3 Design for the clone-selecting robot
2 控制系统设计
考虑到菌落挑取对精度的要求,本课题中转盘驱动机构和培养皿平面运动导轨机构均由伺服电机驱动。由于控制电机数目比较多,执行中间环节配备了多个传感器对其检测定位,并且对菌落进行图像处理后需要计算机对菌落位置转换进行大量计算,故本课题优先选用工控机-运动控制卡-CCD 相机对设备进行控制[30]。图2 中各构件和各控制系统的关系如图3所示。
控制系统可以被分为六个模块,分别是工控机模块、CCD 相机模块、运动控制卡模块、伺服驱动模块、输入信号模块和输出信号模块。其结构关系如图4 所示,每个模块的功能描述如下:
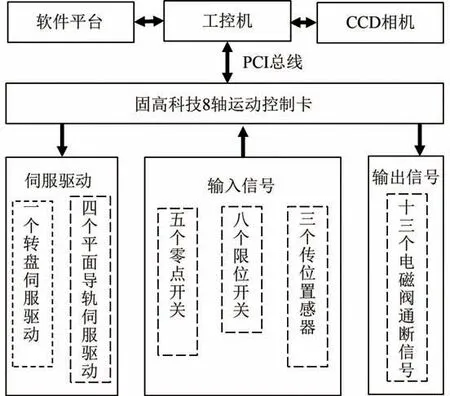
图4 控制系统结构图Fig.4 Design for the control unit
(1)工控机模块 负责CCD 相机采集图像的分析处理工作,负责整个设备资源的调动,使设备稳定有序的运转。具体完成的任务包括基于图像处理软件HexSight 对采集的图像进行处理,并进行被识别对象坐标的提取。
(2)CCD相机模块 负责采集克隆菌落图像。
(3)运动控制卡模块 负责对电机的控制;板卡还用于接收一些设备的运行信息,比如轴状态、轴速度和轴运行时间等。
(4)伺服驱动模块 该模块负责驱动电机工作,伺服电机负责带动十字滑台运动来完成定位,带动转盘转动来完成间歇运动。
(5)输入信号模块 负责接收光电信号的输入,包括十字滑台和转盘的原点信号、十字滑台的限位信号、检测传送机构中挑针有无及气缸状态输入信号。
(6)输出信号模块 负责控制电磁阀实现对挑针上下行和气爪张闭的控制。
计算机和执行机构之间是通过与运动控制卡相连的端子板上的I/O 接口来传送数据,运动控制卡与执行机构之间以光电耦合方式实现通信,大大增强了通信的抗干扰能力,运动控制卡可以同时控制多个轴联动运行,其内部结构如图5(a)所示。本课题设备占用与其配套的端子板上输入端口有16 个,输出端口有11 个,各端口分别与控制卡相连的端子板连接,图5(b)为端子板连接实物图,各I/O 口定义如表1、表2所示。
控制系统硬件连接布局如图6 所示。系统工作流程主要由取针-挑取-接种-落针四部分动作组成,各气爪、气缸运行过程如图7 所示,其中1、2、3 号气缸位置保持不动,1~8号气爪顺时针转动实现克隆挑取整个过程。当8 个气爪工位满载循环运行时,各号气爪上挑针的功能如表3 所示,整个系统工作流程如图8 所示。
3 克隆挑取实验研究
为了验证结构设计和控制系统的可靠性,本实验以大肠杆菌为例,将其从培养皿挑取并接种到96 孔板中。将控制系统中电机、电磁阀、传感器上电后其配带的软件便会识别到各终端的状态,图9为控制系统上电后软件检测的输入、输出设备元件状态,由图可知各连接设备正常。
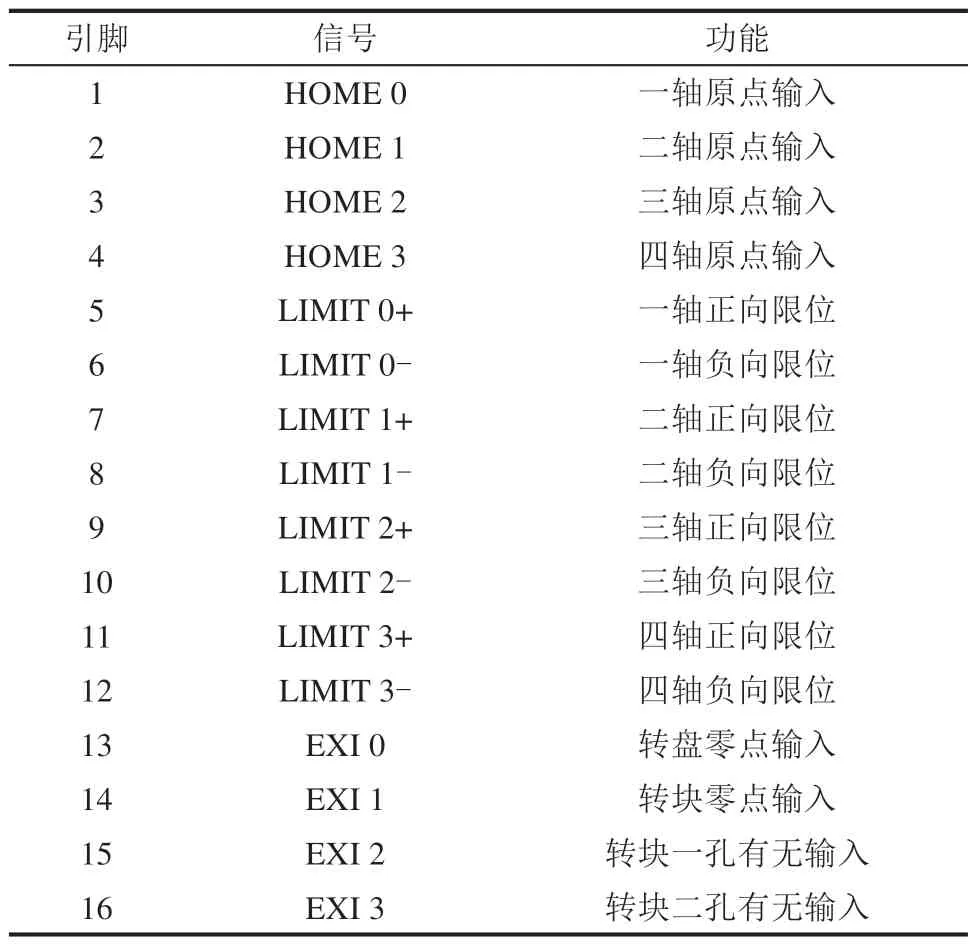
表1 各输入端口地址分配及功能表Tab.1 Address allocation and function of the input ports
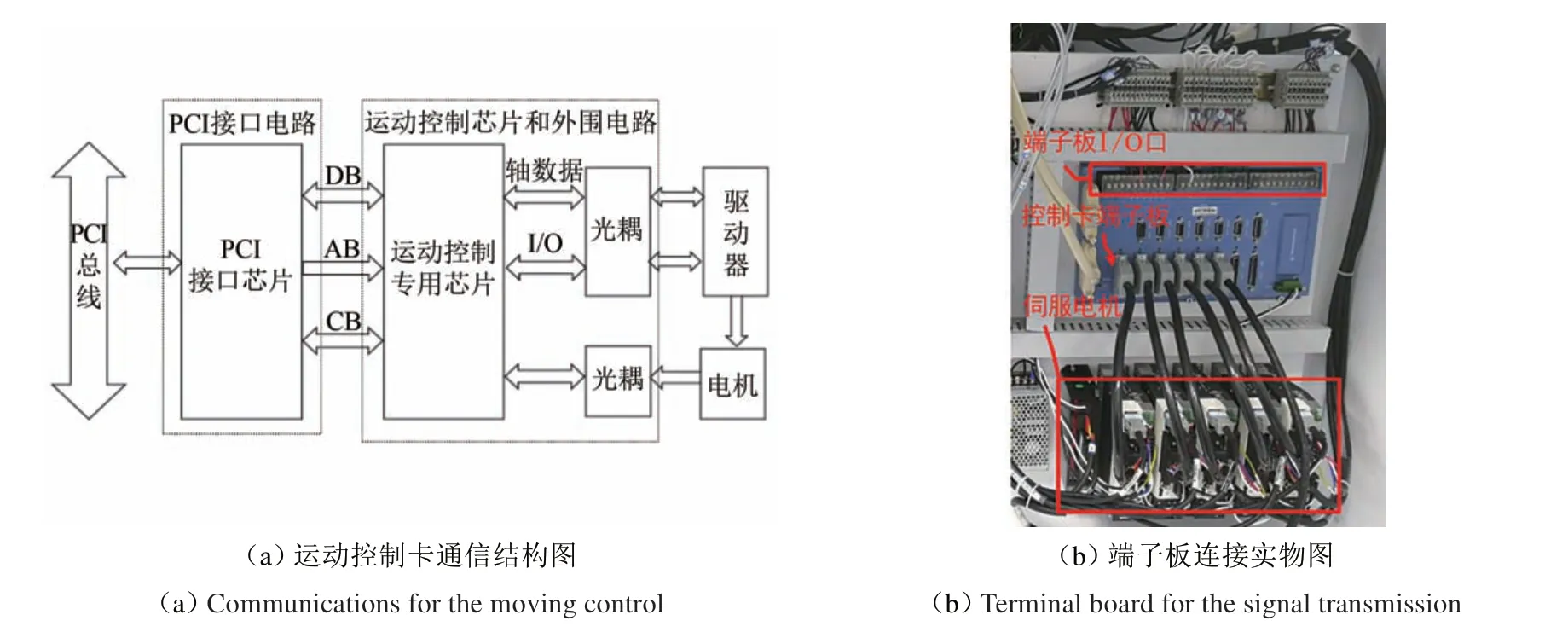
图5 控制卡原理及端子板接线图Fig.5 Control principle and terminal board for the signal input and output
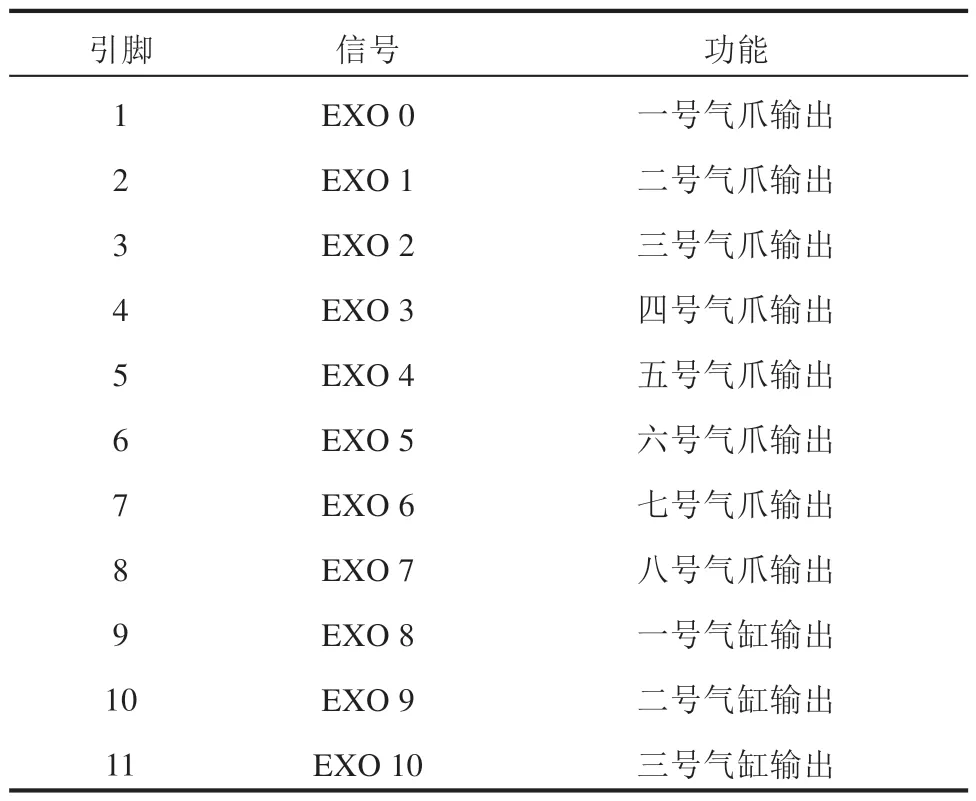
表2 各输出端口地址分配及功能表Tab.2 Address allocation and function of the output ports
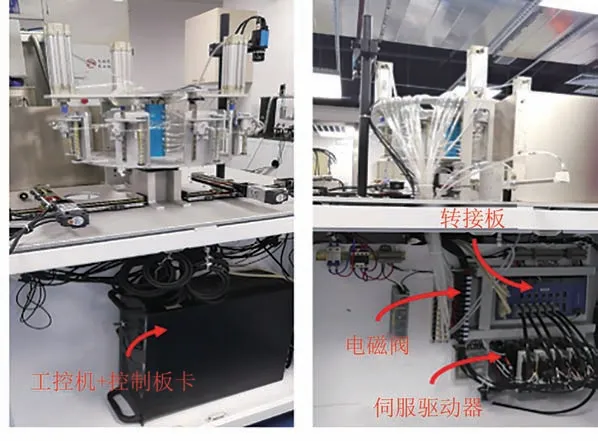
图6 控制系统硬件连接图Fig.6 Hardware for the control system
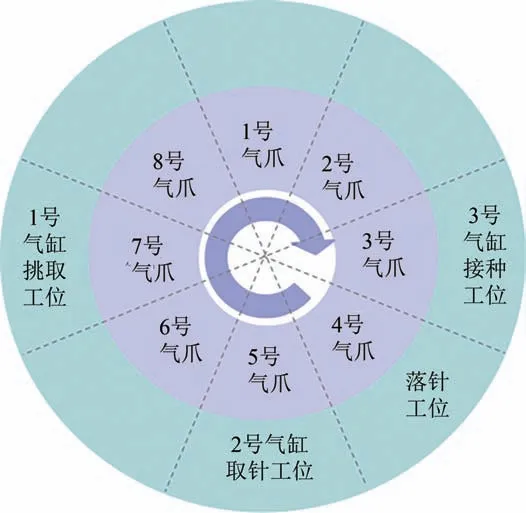
图7 气缸、气爪位置关系及运行过程Fig.7 Position and the operation process of the cylinder and pneumatic gripper
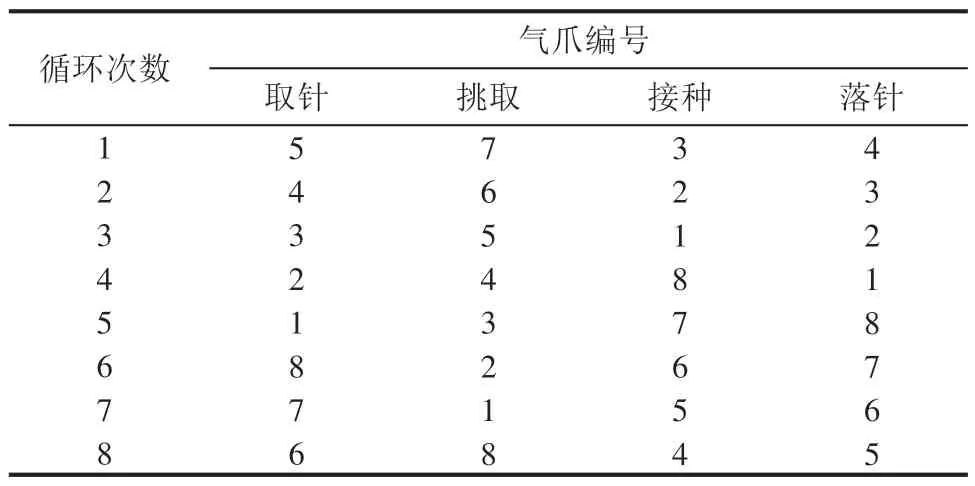
表3 满载循环工作各气爪上挑针功能Tab.3 Picking function of the needles on each pneumatic gripper in a full-load working cycle
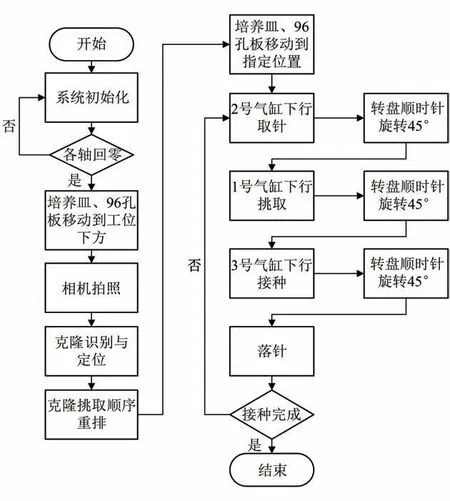
图8 控制系统工作流程图Fig.8 Working flowsheet for the control system
使用Halcon 软件对相机拍摄后的菌落图像进行菌落识别和筛选后(图10),便可定位各目标菌落对应的像素点在图像上的坐标(图11),然后对相机进行标定从而实现像素坐标系到世界坐标系的转换,本课题选用的是Hexsight公司提供的图像处理软件,将相机拍摄的菌落照片上传到该软件上后经过标定及坐标转换就得到了每个菌落的世界坐标[31],如图12所示。
确定控制系统、相机标定及坐标转换无误后,启动电机、气缸随程序设定步骤依次运行,取针-挑取-接种-落针四个步骤如图13 所示。为了检测挑取效果,现以其中三个菌落为例来检验设备挑取准确性。随机取培养皿中三个目标菌落进行挑取,挑取结果表4 及图14 所示,结果显示平均挑取误差为0.03 mm,远小于菌落平均直径2 mm,满足实验要求。
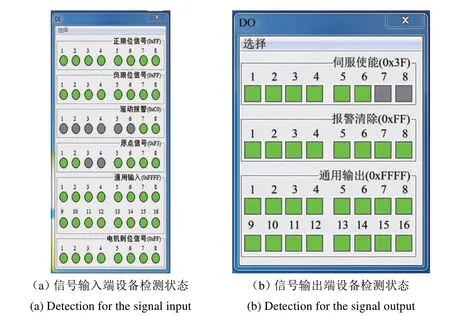
图9 控制系统状态显示图Fig.9 Display of the control system

图10 菌落图像识别及筛选Fig.10 Colony image recognition and screening
4 结论与展望
本文在综合分析克隆菌落挑取机器人国内外研究现状后,设计了一款多针、转盘式的菌落挑取机器人,采用模块化的设计方法,提出克隆菌落挑取机器人的总体设计方案。然后对各个功能模块进行具体结构设计,进而对菌落挑取视觉定位系统进行设计,最后通过控制系统的设计和关键零部件的选型计算完成样机的制作,在样机的基础上选用大肠杆菌进行相关实验,验证了克隆菌落挑取机器人功能模块的可行性、菌落挑取视觉定位算法的可行性与准确性。通过实验数据分析,得出如下结论:
(1)本文提出的基于取针-挑取-接种-落针四步工作流程的一次性挑针克隆挑取方案仅需挑取前对挑针进行一次批量消毒,摒弃了传统设备工作中对金属挑针清洗、消毒两项中间环节(如摘要图所示)。采用多针、转盘式结构设计满足了取针-挑取-接种-落针四工位同时进行,大大提高了挑取效率。
(2)选择采用基于PCI 总线模式控制的“工控机+运动控制卡+CCD 相机”的开放式运动控制交互方法,并提出了控制系统整体结构框架,对控制系统的各个模块进行设计。实验证明样机可实现多轴联动点位运动,图片数字信号的接收与传送,传感器数字信号与控制卡之间信号的相互传递。
(3)基于Halcon、HexSight 图像处理软件平台设计的视觉定位系统可行且视觉定位精度满足设计要求。菌落挑取视觉定位算法准确地建立了以像素为单位的图像坐标系与以毫米为单位的世界坐标系之间的转换关系,快速准确计算出目标菌落的世界坐标,平均定位精度为0.03 mm。执行机构可以精确挑取指定菌落并接种到96 孔板中,证明了一次性挑针挑取方式的可行性。
随着研究的深入,发现还有些待改进的地方,也是后续研究工作的几个方面。
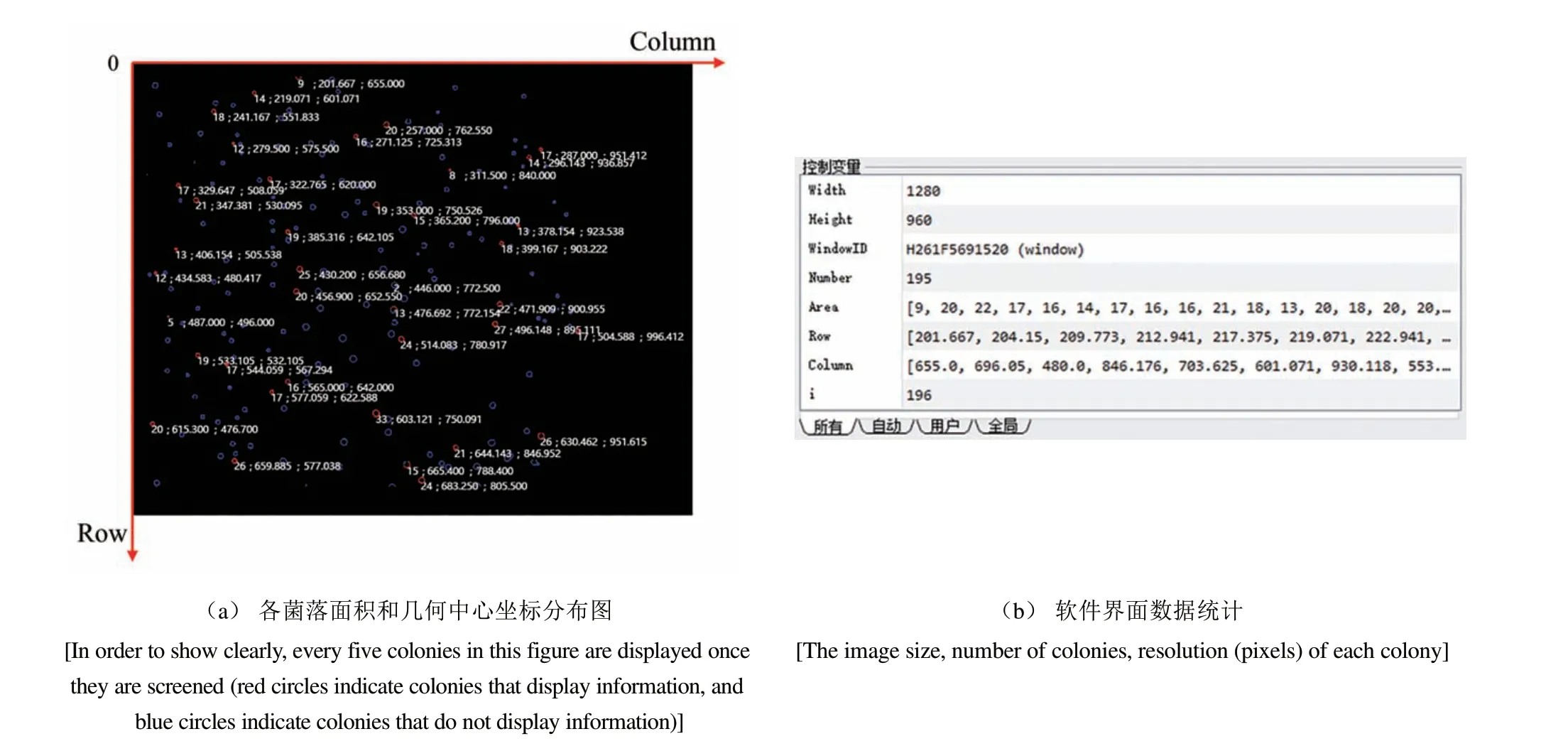
图11 各目标菌落面积及几何中心坐标Fig.11 Target colony area and geometric center coordinates
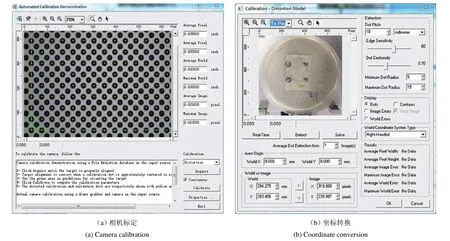
图12 相机标定及坐标转换Fig.12 Camera calibration and coordinate conversion
(1)在保证能够满足加工工艺的情况下,可以增加转盘上的工位,减小培养皿下方直线模组尺寸,从而减小克隆挑取机器人转盘的转动角距和直径,降低设备整体重心,使之结构更加紧凑,运行更加快捷。
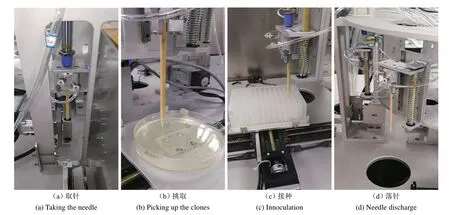
图13 运行步骤实物图Fig.13 Process operation
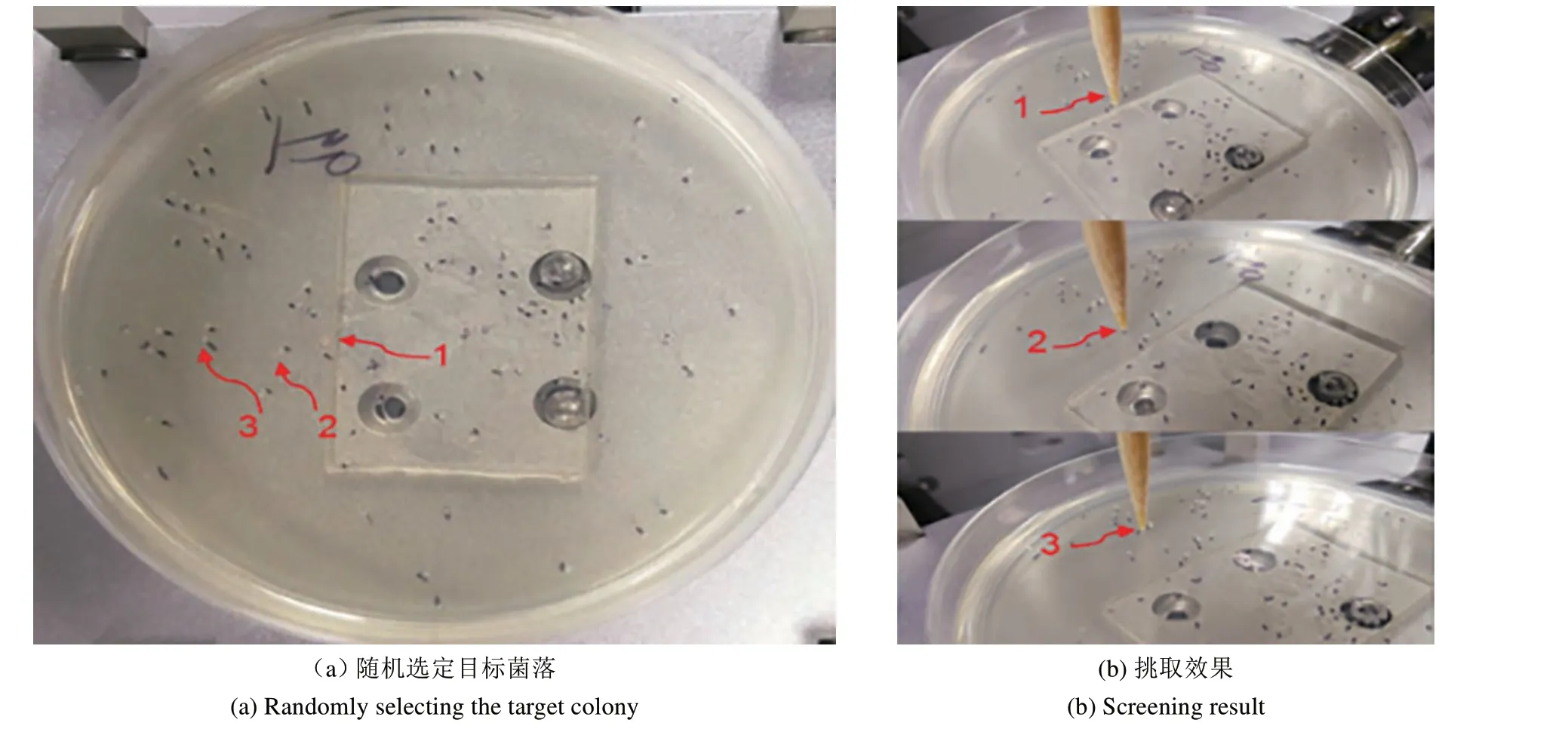
图14 选定目标菌落及其挑取结果Fig.14 Target colonies selected and their analysis
(2)对于含有单种菌落的培养皿而言,目前控制和图像识别系统只能挑取能够识别到的所有菌落,无法在控制界面上人工指定目标菌落点动挑取,也无法对挑取目标菌落的大小、间距、数量、灰度值等特征进行动态设定范围内挑取。
(3)对于含有多种菌落的培养皿而言,目前控制和图像处理系统还无法通过识别菌落颜色、大小、边缘形状等特征对指定单种或多种进行选择性挑取。
(4)对培养皿中菌落图像识别处理后,工控机会得到一系列菌落坐标,其排列顺序影响着执行机构运动的总行程,进而会影响挑取效率,故需要设计一套算法使之能够计算出每次挑取培养皿中目标菌落对应的最佳挑取路径。
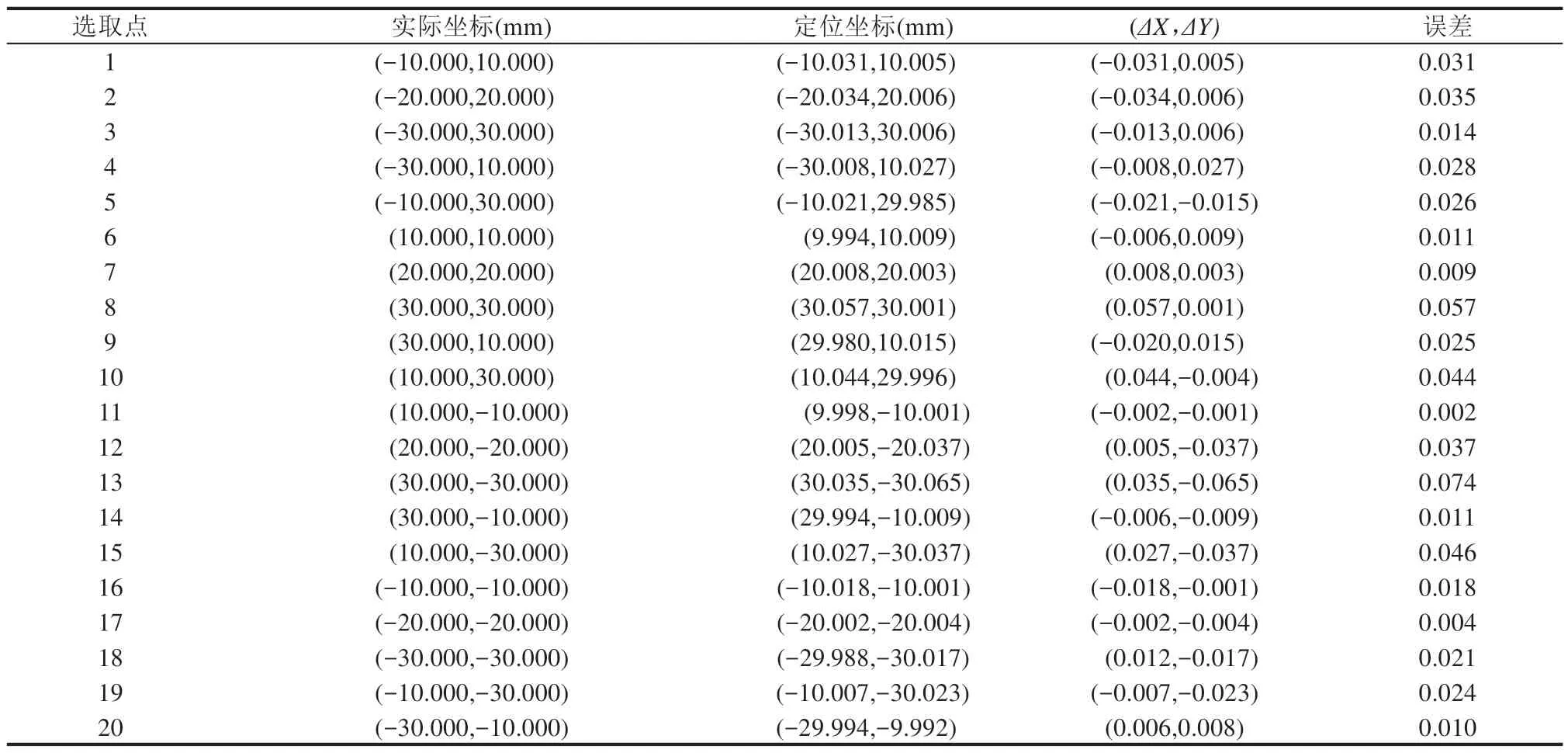
表4 实验结果Tab.4 Experimental results
猜你喜欢
护理研究(2022年7期)2022-04-29
小哥白尼(趣味科学)(2022年1期)2022-04-26
现代食品(2022年6期)2022-04-19
家庭医药(2022年3期)2022-03-24
复旦学报(医学版)(2021年4期)2021-08-05
农业工程学报(2020年20期)2020-12-25
考试与评价·高二版(2020年4期)2020-09-10
知识就是力量(2020年2期)2020-05-19
发明与创新·大科技(2019年2期)2019-06-26
销售与市场(管理版)(2017年3期)2017-03-28