
暂态录波型故障指示器的单相接地故障研判应用
2021-03-11 03:11吴楠史明明朱卫平张刘冬
南方电网技术 2021年1期
吴楠,史明明,朱卫平,张刘冬
(1. 国网江苏省电力有限公司电力科学研究院,南京211103;2. 国网江苏省电力有限公司,南京210024)
0 引言
提升配电网故障处理能力是提供用户优质服务的关键。据统计电网80%的故障为配网故障,其中70%为单相接地[1 - 4]。我国配电网大多采用中性点非有效接地方式,单相接地时故障点的定位和处理尤为复杂[5 - 12]。近年来,配电网建设日趋完善,依赖包含主站、终端的配电自动化系统进行单相接地故障研判成为配电网故障处理的主要趋势[13 - 14]。
暂态录波型故障指示器为安装于架空线路上对短路、接地故障进行告警、录波的装置,录波波形通过GPRS远传给主站,由主站根据波形暂态特征及线路拓扑综合定位故障区域。相较于馈线终端(FTU)、站所终端(DTU),暂态录波型故障指示器无需停电安装,无需独立的零序电压、零序电流互感器,占地较小,且可根据所需故障定位精度调整安装间距,灵活性较高。因此,在实际工程应用中,多采用暂态录波型故障指示器与主站相配合的方法对配电网故障进行研判。
现有研究多针对主站单相接地故障研判算法、终端本体及参数设计等进行研究[15 - 17],鲜有针对故障指示器、主站实际工程应用进行分析及改进。本文通过现场暂态录波型故障指示器的应用效果,针对故障指示器安装过程中可能出现的反向、错相,运行过程中可能出现的三相录波不同步等问题,提出了波形修正方案,针对录波瞬时暂态特征误差较大的问题,提出主站单相接地故障定位算法,为配电网单相接地故障处置能力提升提供实践依据。
1 基于暂态录波型故障指示器的单相接地故障研判机理及存在问题
1.1 暂态录波型故障指示器工作原理
暂态录波型故障指示器由采集单元和汇集单元组成,结构如图1所示。
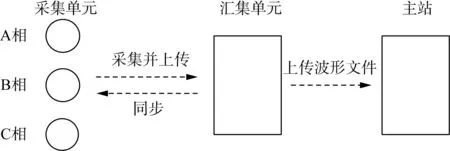
图1 暂态录波型故障指示器结构Fig.1 Structure of transient recording type fault indicator
图1中采集单元安装在线路上,用于监测线路运行状态及故障特征,形成量测、告警及录波文件等,并上传给汇集单元,汇集单元与主站进行信息交互,用于主站故障综合定位。
当故障指示器检测到线路发生短路故障,即检测到电流突变值达到阈值后,就地采集故障信息并录波,与主站进行信息交互并以闪光形式告警;当故障指示器检测到线路发生单相接地故障,即检测到相电场强度突变值达到阈值后,就地采集故障信息并录波,与主站进行信息交互。
1.2 暂态录波型故障指示器在实际工程应用中存在的问题
基于暂态录波型故障指示器的单相接地故障研判,在实际工程应用中存在如下问题。
1)故障指示器的三相采集单元应按统一潮流方向分相进行安装,流过采集单元的电流方向应与场强方向正相关。实际工程人工安装时,ABC三相采集单元可能反向、错相,影响录波及故障分析准确性。
2)故障指示器三相采集单元由于硬件、通信可靠性等原因,存在三相电流录波时间不同步的问题,影响汇集单元零序电流合成准确度,不利于主站故障分析。
3)工程应用中为了降低故障指示器损耗,采集单元采样频率通常较低,单相接地故障时高频暂态录波波形精度较低,此时利用瞬时暂态波形特征进行故障研判误差较大。
1.3 主站单相接地故障研判机理
主站根据线路上各处的录波波形,结合线路拓扑,通过稳态或暂态零序信号分析,进行单相接地故障研判。由于单相接地时,暂态电压、电流特征明显,且其特征与系统中性点接地方式无关,故主站多采用基于暂态零序信号进行单相接地故障研判,主要包括首半波法、暂态能量法、波形相似法、小波法等。主站研判策略正确执行的基础是电压、电流录波同步且波形准确,其中首半波法等依靠瞬时暂态波形特征进行单相接地故障定位的方法对波形采样精度要求较高。
2 基于暂态录波型故障指示器的单相接地故障研判应用改进
本文针对故障指示器在实际工程应用中存在的问题,提出对故障指示器录波进行预处理或校正,对主站研判算法进行改进,提升故障指示器基础数据正确性及主站故障研判准确性。
2.1 基于录波稳态特征的波形预处理方法
由于实际工程安装时,可能存在A、B、C三相采集单元安装反向或错相的现象,根据录波稳态波形特征对故障指示器波形进行预处理,方法如图2所示。图2中录波波形W1为comtrade99标准格式,共有8个通道的波形,分别是:ABC三相电压、零序电压,ABC三相电流、零序电流。零序电压、零序电流分别为相电压、相电流的合成。W1中电流为采集单元安装处的线路电流;电压实际为采集单元安装处场强的感应值,其与线路电压线性正相关,可用来反映线路电压的相对大小。
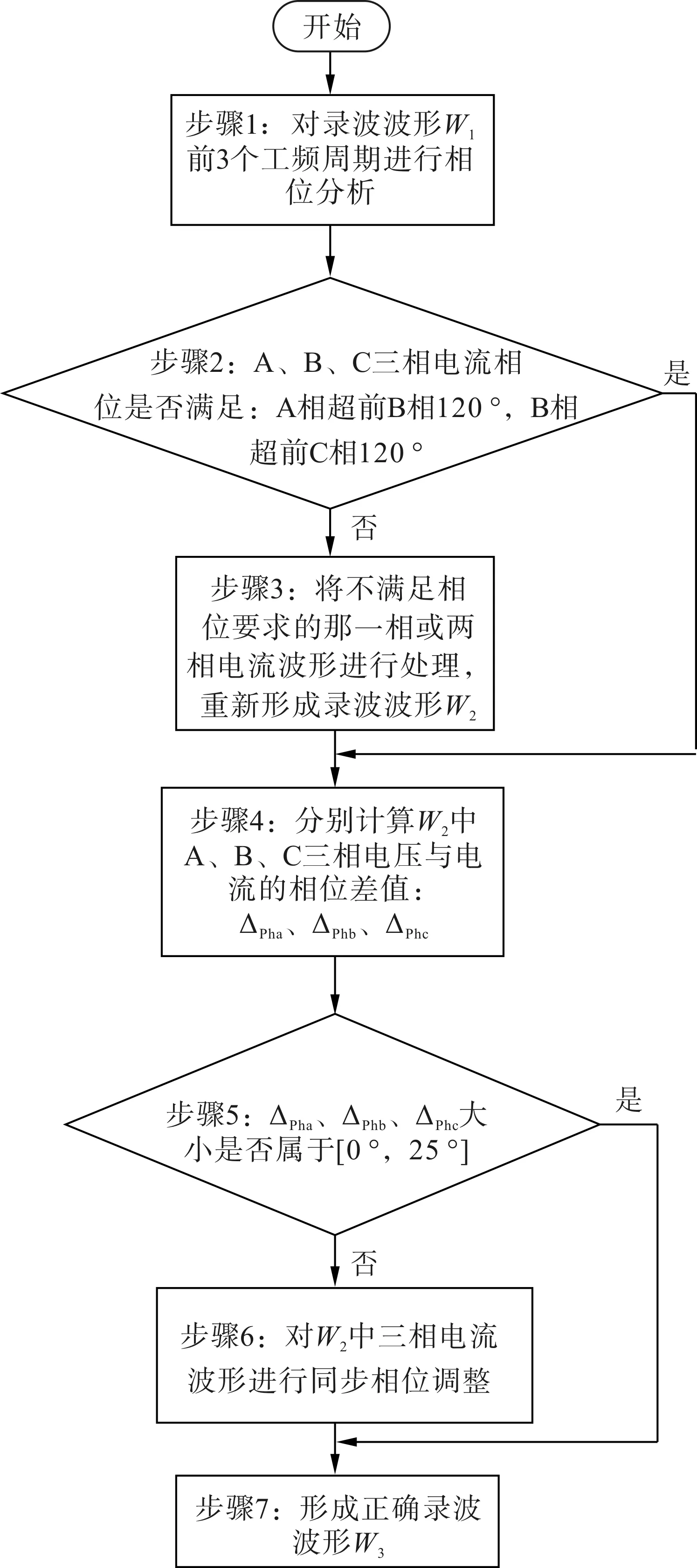
图2 故障指示器波形预处理方法Fig.2 Waveform preprocessing method of transient recording type fault indicator
图2步骤2中,当三相电流相位不满足:A相、B相、C相正常正序相位时,可通过以下操作中的一种或几种组合(①或②或③或①②或①③或②③或①②③)重新形成录波波形W2:
①交换B、C相电流波形;
②B相电流波形反向;
③C相电流波形反向。
修正后的波形W2满足A相、B相、C相正常正序相位。但W2以A相电流波形为基准,可能存在A、B、C三相电流同时反向或同步错位的情况,因此需借助W1中的电压波形进行修正。
由于配电网功率因数要求在0.9以上,且配电网负载偏感性,即电流滞后电压不超过arccos0.9=25 °,因此W2中三相电压与电流的相位差值ΔPha、ΔPhb、ΔPhc应满足区间[0 °,25 °], 当不满足条件时,可通过步骤六即以下操作中的一种(①或②或③或④或⑤)进行同步相位调整,重新形成正确录波波形W3。
①A、B、C三相电流相位依次+180 °;
②A、B、C三相电流相位依次+60 °;
③A、B、C三相电流相位依次-60 °;
④A、B、C三相电流相位依次+120 °;
⑤A、B、C三相电流相位依次-120 °;
主站通过以上步骤预处理后,可得到规避采集单元安装反向或错相的故障指示器录波波形。
2.2 基于TLS-ESPRIT的波形同步校正法
当故障指示器三相采集单元录波不同步,即时标误差大于100 μs时,会影响汇集单元零序电流的合成准确度。文中提出总体最小二乘-基于旋转不变技术的信号参数估计(total least square-estimation of signal parameters via rotation invariance techniques),TLS-ESPRIT)[18]波形同步校正法,具体流程如图3所示。
图3步骤2中,基于TLS-ESPRIT的模态分析法如下。
TLS-ESPRIT用于将信号分解为多个振荡衰减正弦信号的有效方法,被分解后的每个分量可认为是一个模态。假定待分析信号u(n)由k个瞬态自由信号和白噪声信号组成,如式(1)。
(1)
式中:Ap、δp、fp、φp分别为第p个瞬态自由分量幅值、衰减系数、频率、相角;ω(n)为均值为0的白噪声信号。
1)根据采样序列s(·)生成Hankel矩阵,则构造的Hankel矩阵SM×N可以表示为式(2)。
(2)
式中:M>p;N>p;M+N=Q+1。
2)对在1)中的SM×N矩阵做奇异值分解,具体表示为矩阵U、Σ和V相乘,即SM×N=UΣV。此时,Σ对角线上为SM×N的奇异值ζ1,ζ2,…,ζm,m=max(M,N), 且奇异值由ζ1到ζm递减。
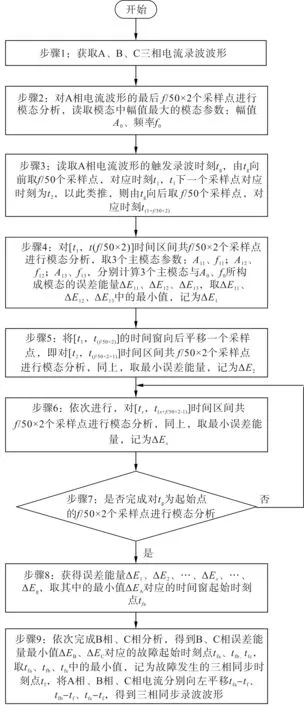
图3 故障指示器波形同步校正法Fig.3 Waveform synchronization correction method of transient recording type fault indicator
3)将信号空间V按照奇异值大小进行划分,得到信号子空间V1和噪声子空间V2,即V=[V1V2]。具体地,根据ζ1,ζ2,…,ζp等前p个奇异值对应的右奇异向量得到信号子空间V1,根据后(m-p)个奇异值所对应的右奇异向量得噪声子空间V2。
4)由信号子空间V1构造矩阵V3、V4。其中,V3为V1去除第一行后得到的矩阵,V4为V1去除最后一行后得到的矩阵。进一步地,在此基础上构造矩阵SS=[V4V3]。

(3)

(4)
(5)
式中Ts为采样周期。
7)利用TLS法求得各模态的幅值与初始相角。对于采样序列s(1)、s(2)、 …、s(Q), 有:
Y=ΖC
(6)
其中

(7)
(8)
根据TLS法,有C=(ΖTΖ)-1ΖTY, 据此,可以计算得到各模态的幅值以及相位。
Ap=2|Cp|
(9)
φp=arg(Cp)
(10)
因此,通过以上式(4)、式(5)、式(9)、式(10),可得到式(1)信号的模态分解。
故障指示器录波是对故障时刻前4个、后8个工频周波进行录波tg为触发录波时刻。图3步骤2中,f/25为非整数时,向上取整,对A相电流波形的最后f/25个采样点进行模态分析,即为对故障后的2个稳态周波进行模态分析。模态分析法可得到各个瞬态自由分量的幅值、衰减系数、频率、相角4个参数,图3中仅对幅值A、频率f两个参数进行应用。
图3步骤4中,3个主模态的定义为:3个幅值最大的模态。能量误差ΔE11、ΔE12、ΔE13表示为式(11)。
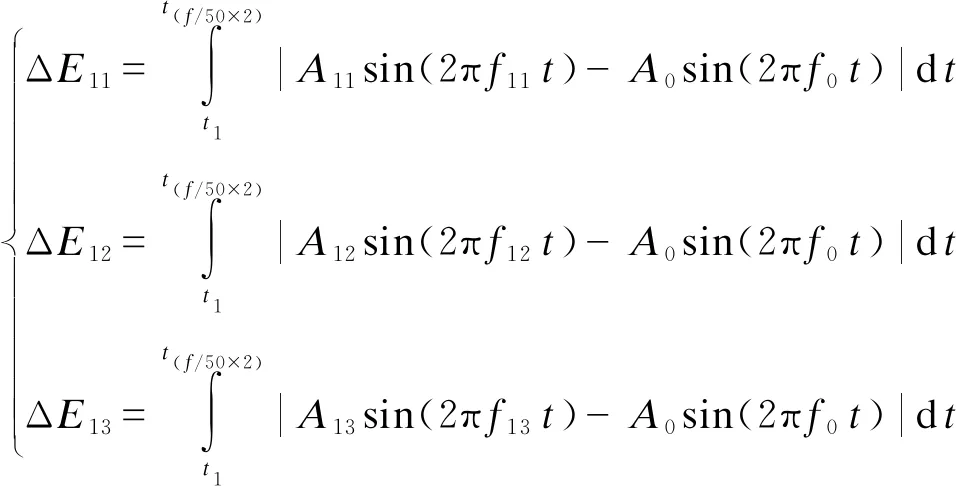
(11)
式中:取ΔE11、ΔE12、ΔE13中的最小值,记为ΔE1;A11、A12、A13为3个主模态的幅值;A0为A相电流故障后稳态波形模态的最大幅值。
图3中的波形同步校正法,通过提取故障后稳态波形的模态,对tg附近波形分量的模态进行匹配,能量误差最小对应的时间点应为实际触发录波时刻。波形同步校正法可修正三相采集单元不同步录波误差,保证零序电流合成的准确性。
2.3 基于相关系数法的主站单相接地故障研判算法
工程应用中为了降低故障指示器损耗,采集单元采样频率通常较低,一般为4 kHz左右,存在高频暂态电压电流采集不准确的问题,此时主站利用极性比较等瞬时暂态波形特征方法无法准确进行接地故障研判,改进的方法分为两类:
1)增大采集单元采样频率;
2)采用功率法、能量法等非瞬时暂态波形特征方法。
文中提出采用相关系数法进行单相接地故障研判。一般地来说,故障点上游线路的暂态零序电流波形相关性较高;非故障线路及故障点下游线路的暂态零序电流波形相关性较高[17]。通过依次对相邻检测点暂态零序电流波形的相关性进行分析[19 - 20],定位出故障区段。
定义暂态零序电流相关系数ρ表示两个波形i01、i02的相关性,如式(12)所示。
(12)
式中:n为采样序列,1到N为零序电流暂态特征起始至结束的采样时刻。i01(n)、i02(n)相等时,ρ=1;i01(n)、i02(n)完全无关时,ρ=0。相邻点的ρ可用来判断两点间的区段是否为故障区段。设定波形相关阈值为θ(取值在0.5到0.8之间),ρ>θ时,两波形相关,两波形在故障点同侧;ρ<θ时,两波形不相关,两波形在故障点异侧,故此两录波点间为故障区间。该方法适用于辐射型电网结构,暂不考虑环网结构。
3 现场实际案例分析及建议
现场试验线路拓扑如图4所示,系统为中性点经消弧线圈接地系统,在L4线路上4号杆C相处进行单相接地故障试验,L4线路上装设3套暂态录波型故障指示器,分别安装在试验点上游1号杆、3号杆处,试验点下游29号杆处。L1、L2、L3 3条出线共安装6套暂态录波型故障指示器,如图4所示。
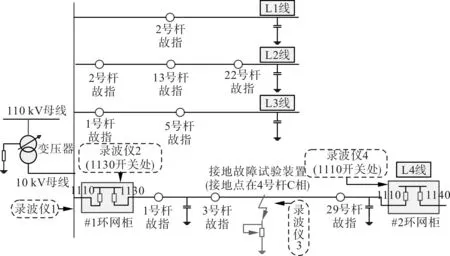
图4 单相接地故障试验线路拓扑图Fig.4 Topology of single-phase grounding fault test
图4中,为了对比暂态录波型故障指示器录波准确性,安装了4套录波仪(录波仪1—4),录波仪采样频率为10 kHz。根据现场实际工况,录波点选择如表1所示。
现场基于图4,开展金属性接地试验,故障指示器采样频率为4 096 Hz,具体分析如下。
3.1 暂态录波型故障指示器结果分析及验证
3.1.1 L4线1号杆故障指示器波形分析
L4线1号杆故障指示器录波波形如图5所示。
由图5故障前稳态波形可以看出,A、B、C三相电流相位关系不正确,按2.1节中分析得出:A相采集单元安装反向;图5中,A相电压一直为0,可知故障指示器无法测量A相场强;综上,A相故障指示器采集单元接反且存在场强感应故障。
表1 录波仪信号选取Tab.1 Signal selection of recorder
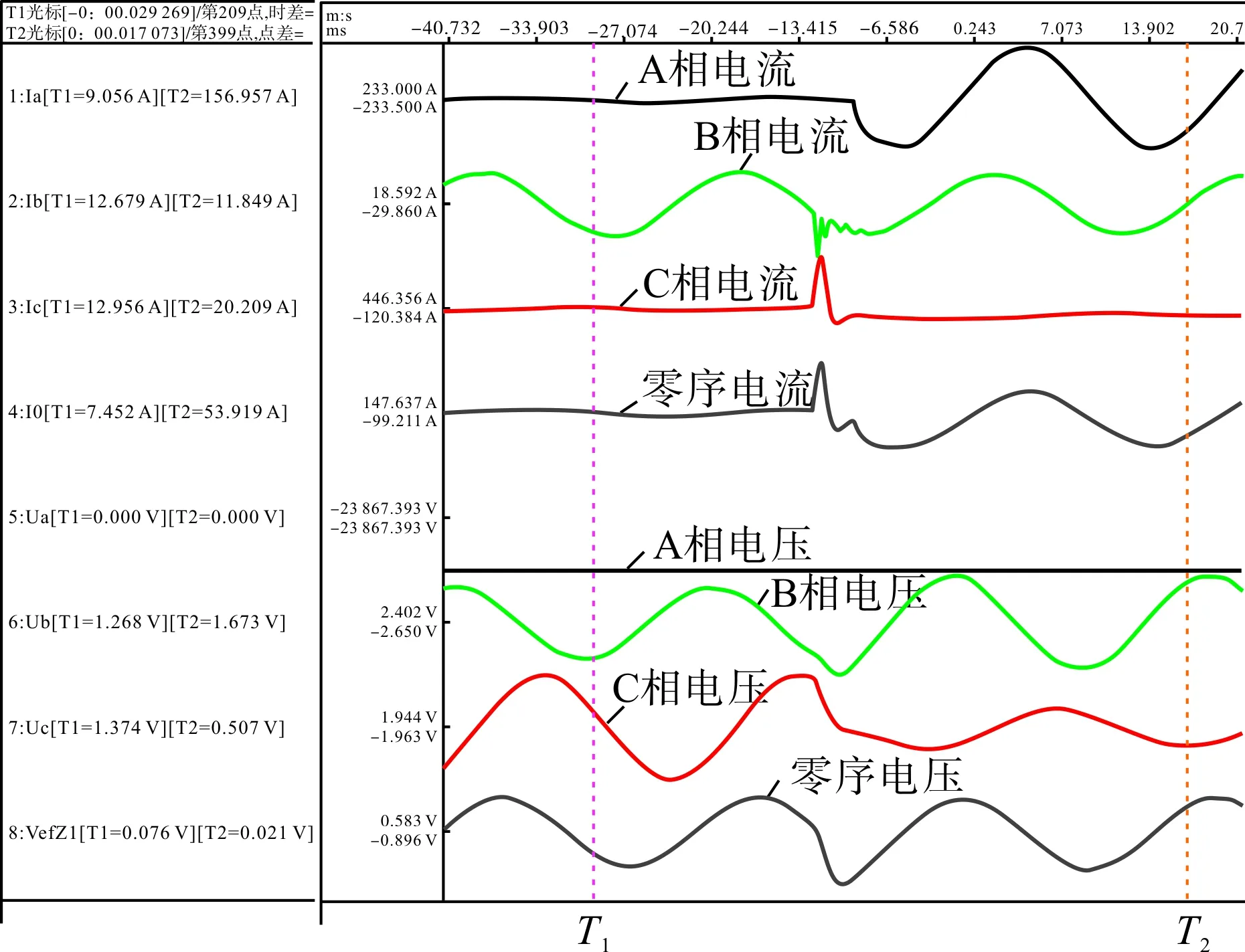
图5 L4线1号杆故障指示器录波波形Fig.5 Waveform of fault indicator L4 line 1 rod
3.1.2 L4线3号杆故障指示器波形分析
L4线3号杆故障指示器故障时刻电流录波如图6(a)所示,为了对比故障指示器录波是否准确,录波仪2处故障时刻电流波形如图6(b)所示。
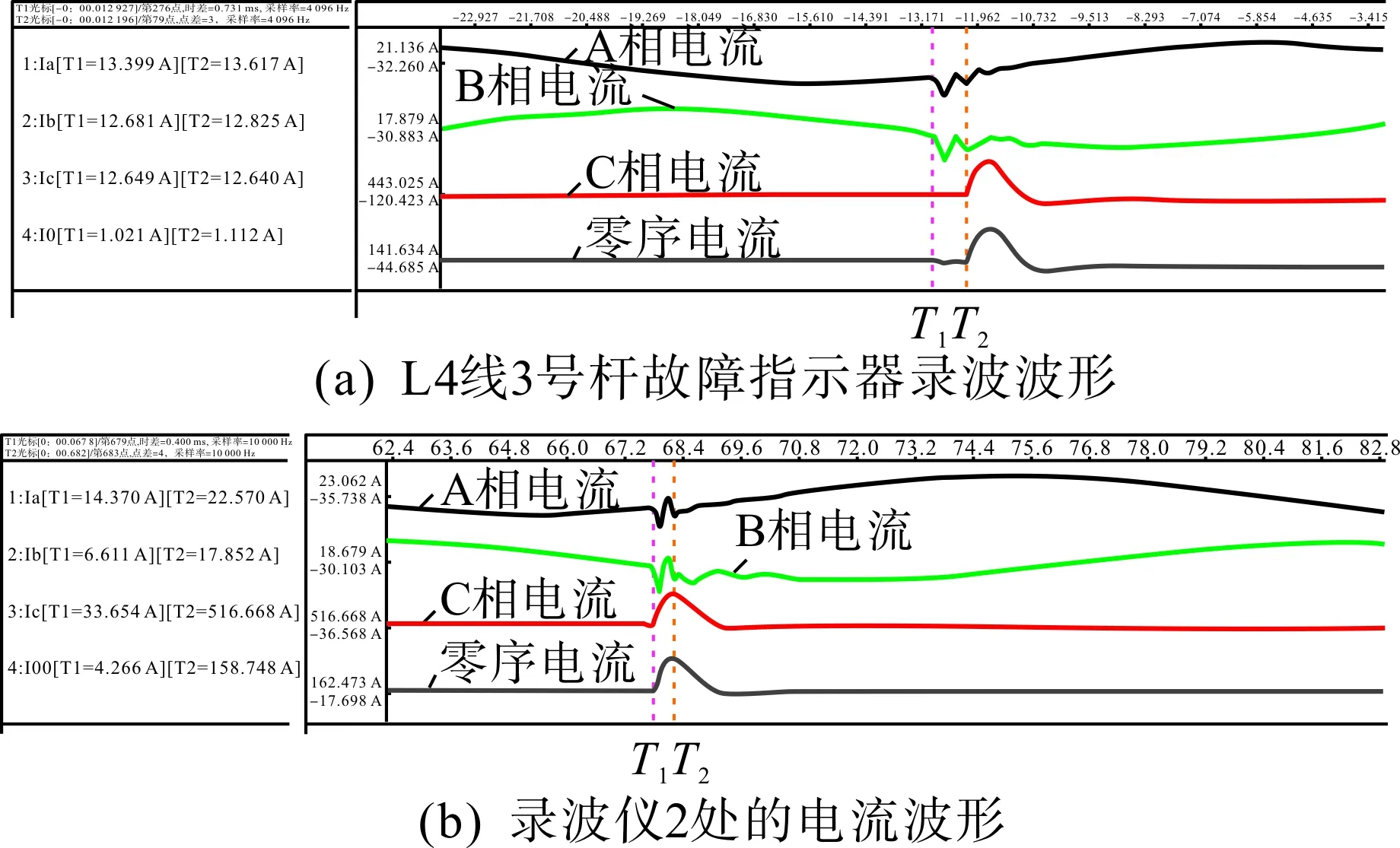
图6 L4线3号杆故障指示器和录波仪2处的波形Fig.6 Waveform of fault indicator L4 line 3 rod and recorder 2
对比图6(a)、图6(b)可知,图6(a)中C相故障指示器录波启动时刻存在延时。按2.2节分别计算图6(a)中A、B、C三相的误差能量ΔE,如图7所示。并由ΔE最小值找出A、B、C三相故障起始时刻tfa、tfb、tfc。
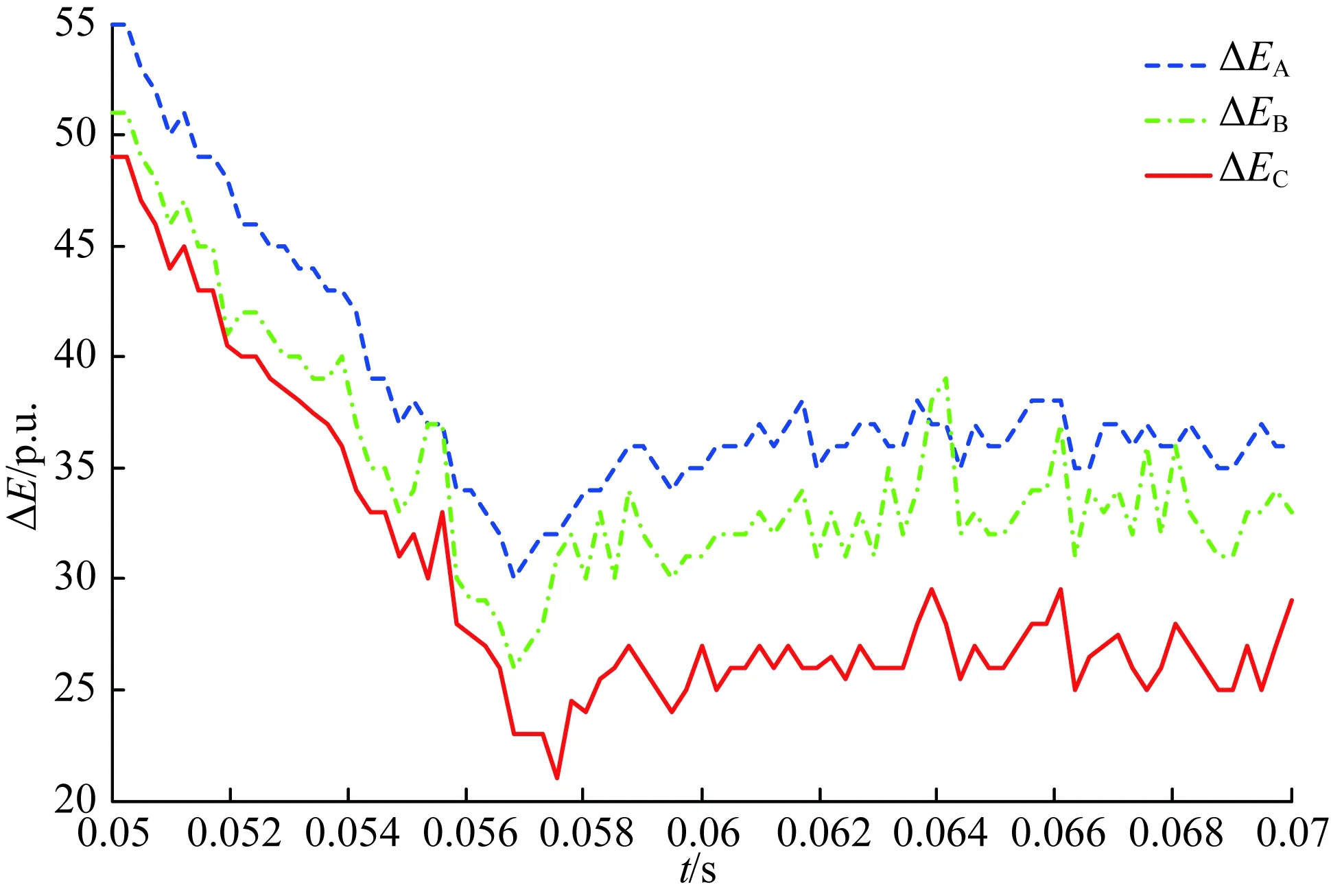
图7 误差能量图Fig.7 Error energy map
由图7分析可知,tfa与tfb同步,tfc滞后tfa3个采样点,即滞后1/4 096×3 s=732 μs。根据以上计算修正故障指示器录波波形,图6(a)修正前后的故障时刻录波如图8所示。
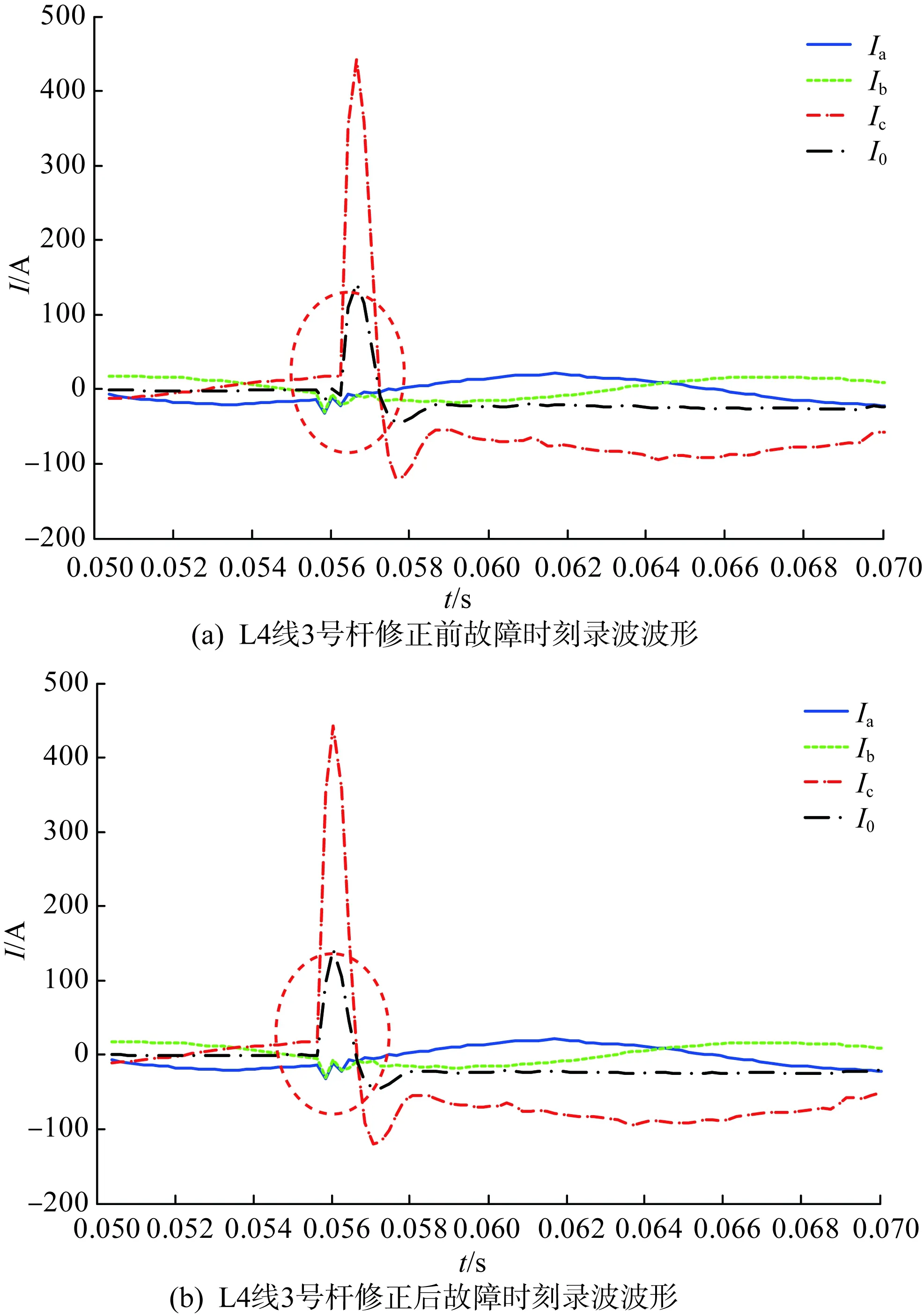
图8 L4线3号杆修正前后故障时刻录波波形Fig.8 Fault waveform of L4 line 3rd rod before and after correction
L4线3号杆故障指示器位于故障点上游,由文献[17]可知,故障时刻C相电流突变量应与零序电流突变量正相关,且与A相、B相电流突变量负相关。修正前的图8(a),故障时刻C相电流无明显突变量,零序电流突变量与A相、B相电流突变量正相关,与理论分析不符;修正后的图8(b)电流突变量与理论分析相符。
3.1.3 L4线29号杆故障指示器波形分析
L4线29号杆故障指示器故障时刻电流录波如图9(a)所示,为了对比故障指示器录波是否准确,将录波仪4处故障时刻电流波形进行放大,如图9(b)所示。
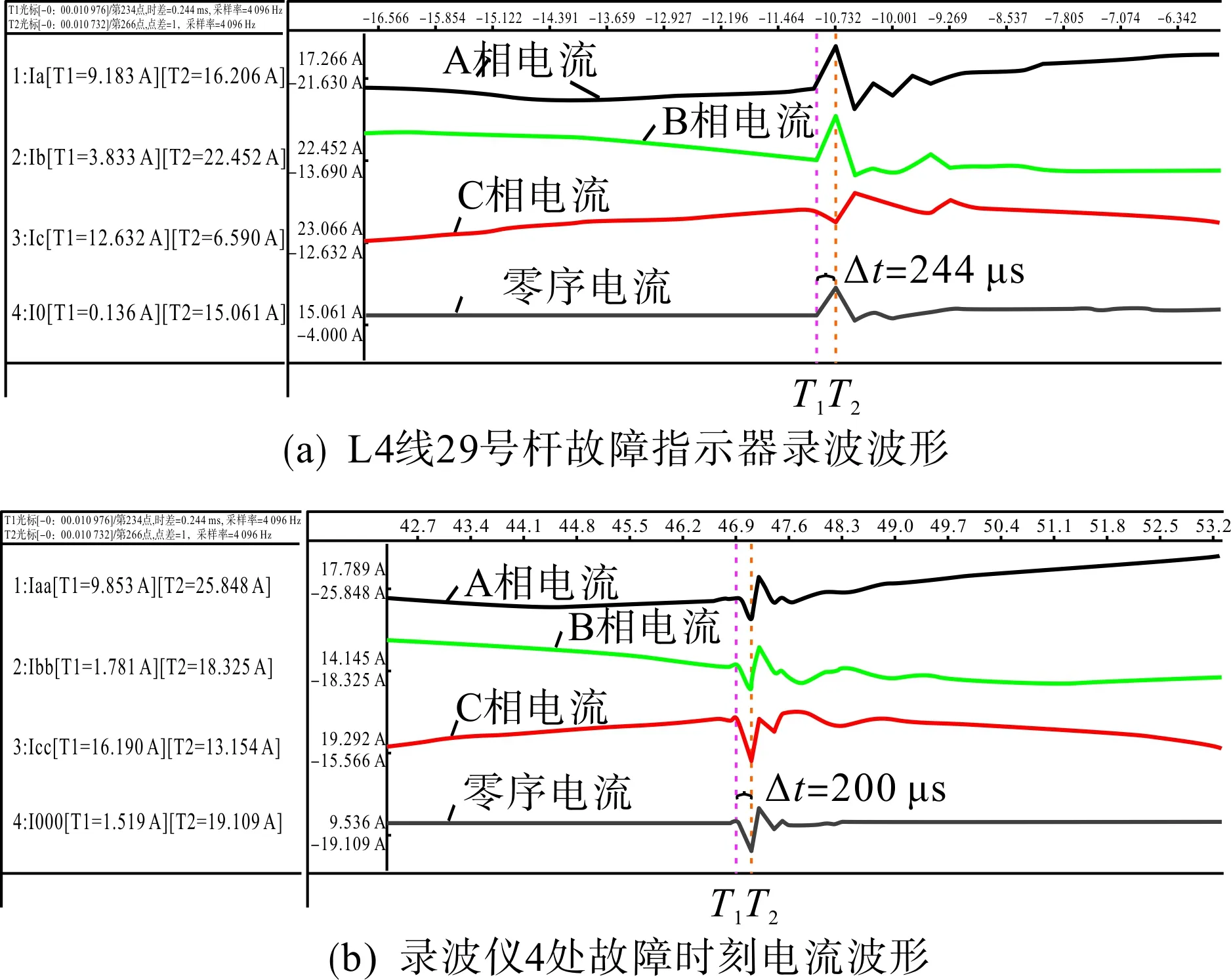
图9 L4线29号杆故障指示器和录波仪4处的波形Fig.9 Waveform of fault indicator L4 line 29 rod and recorder 4
由文献[21]可知,故障点下游各相电流突变量应与故障点上游非故障相电流突变量正相关。图8(b)与图9(b)符合此特性,即故障点上游L4线3号杆故障指示器的A相、B相、零序电流的突变量,与故障点下游L4线29号杆故障指示器的A相、B相、C相、零序电流的突变量正相关。且其均与L4线3号杆故障指示器C相电流突变量负相关。
由图9(a)、图9(b)对比可知,故障指示器所录波形与录波仪所录波形的A、B相电流的突变量极性相反,故障指示器录波不符合理论分析。从图9可以看出,若要有效录波故障后电流高频暂态分量,采样间隔至少为0.000 2 s(即采样频率至少5 000 Hz),现有故障指示器采样频率较低,无法精细展现暂态电流高频分量。
由文献[22]中分析可知,小电流接地系统单相接地时电流暂态分量频率分布在300~2 000 Hz,按频率2 000 Hz时一个周期采样4个点计算,录波采样频率在8 000 Hz以上时,可较好地录制暂态电流高频分量。
3.2 主站单相接地故障研判算法分析及验证
由于故障指示器采样频率较低,主站利用极性比较等瞬时暂态波形特征方法无法准确进行接地故障研判,文中提出采用相关系数法进行单相接地故障研判。
计算图4中L4线1号杆和3号杆故障指示器零序电流的相关系数,如式(13)所示。
ρ1-3=0.93
(13)
计算图4中L4线3号杆和29号杆故障指示器零序电流的相关系数,如式(14)所示。
ρ3-29=0.18
(14)
由式(13)、式(14)可知,1、3号杆暂态零序电流相关,3、29号杆则不相关,因此故障点位于3、29号杆之间,与现场实际情况一致。
4 结语
针对暂态录波型故障指示器安装过程中可能出现的反向、错相问题,本文提出了基于稳态特征的波形预处理方法,及时修正故障指示器录波出现的相位反向、相序错乱问题;针对故障指示器录波过程中出现的三相不同步问题,提出了采用TLS-ESPRIT进行误差能量分析,从而校正录波延时;针对故障指示器采样频率偏低,瞬时暂态信号误差大的问题,提出了基于相关系数法的主站单相接地故障研判算法,提升配电网单相接地故障研判的准确率。文中通过现场实际案例验证了所提故障指示器录波波形处理、主站研判算法的准确性。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
电气电子教学学报(2022年2期)2022-05-23
包装工程(2022年9期)2022-05-14
微电机(2022年1期)2022-03-21
能源工程(2021年2期)2021-07-21
环球时报(2021-07-13)2021-07-13
电子制作(2018年14期)2018-08-21
企业技术开发·下旬刊(2016年11期)2016-12-27
科技视界(2015年18期)2015-12-25
