
FPSO时域动态拖航分析
2021-03-06 03:18:42朱为全于常宝李晓明
中国海洋平台 2021年1期
赵 强,朱为全,高 巍,于常宝,李晓明
(1.海洋石油工程股份有限公司,天津 300452; 2.北京高泰深海技术有限公司,北京 100029)
0 引 言
目标浮式生产储卸油装置(Floating Production Storage and Offloading,FPSO)位于泰国某海域,油田服役年限已到,作为油田重要的生产设施,该FPSO需要进行解脱并拖航至附近船厂进行退役处理。FPSO在拖航过程中的拖缆张力响应和风浪流作用下的运动特性,尤其是艏摇运动特性和被拖物的稳定性是拖航作业所关注的重点。
自20世纪60年代开始,不断有学者研究拖航的操纵性能和拖航航行性能的影响因素。STRANDHAGEN等[1]采用线性理论发现改变拖缆长度和拖带点位置可使拖航物保持稳定。BERNITSAS等[2]研究在弹性拖缆作用下被拖物的非线性稳定性。JIANG等[3]研究自动舵控制下的拖航航向稳定性并与以往方法进行对比。张文乐等[4]研究拖船通过弹性拖缆拖拉船舶,在忽略被拖物反作用力的情况下对被拖物的运动特性进行模拟并对稳定性进行判断。严似松等[5]研究被拖物在静水和波浪中的运动特性。李强[6]研究拖船、拖缆、被拖物整体三自由度数学模型,对整体拖航进行仿真。
本文出于工程目的对目标FPSO在给定拖航海况条件下、考虑不同风浪流角度组合条件下的拖缆张力响应与FPSO的艏摇运动进行非线性时域动态分析,给出拖缆在分析工况下的张力响应值和FPSO艏摇运动值,为拖缆选型与实际拖航作业提供参考。
1 基本信息
1.1 FPSO信息
目标FPSO为15万吨级,主要信息如表1所示。FPSO拖航状态下的风面积、流面积如表2所示。风、流力系数如图1和图2所示。
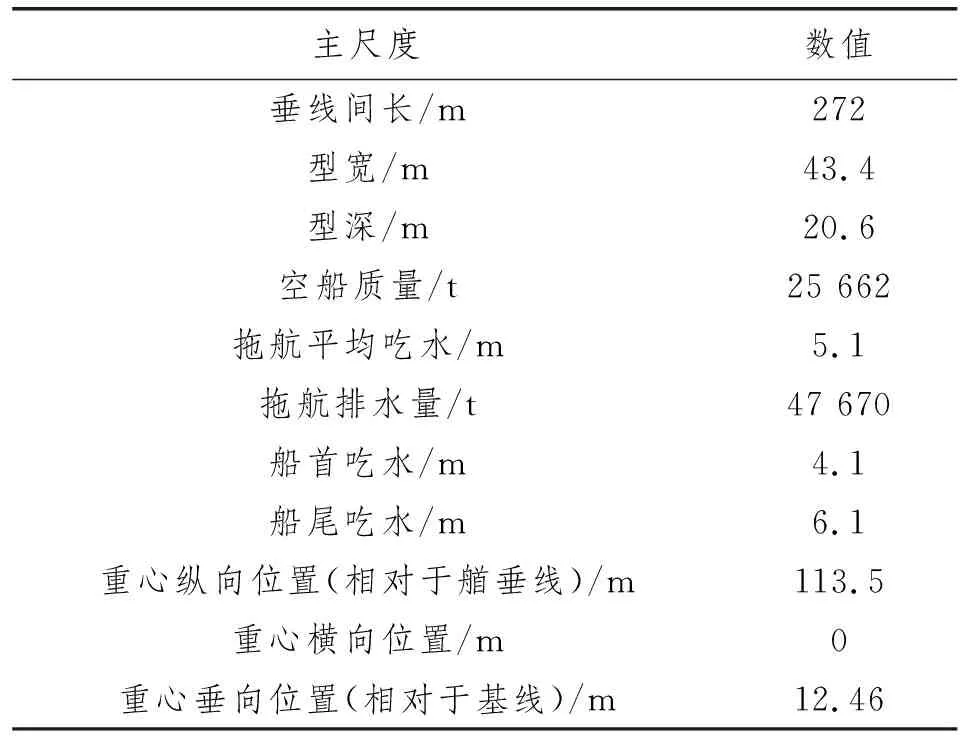
表1 FPSO主要信息
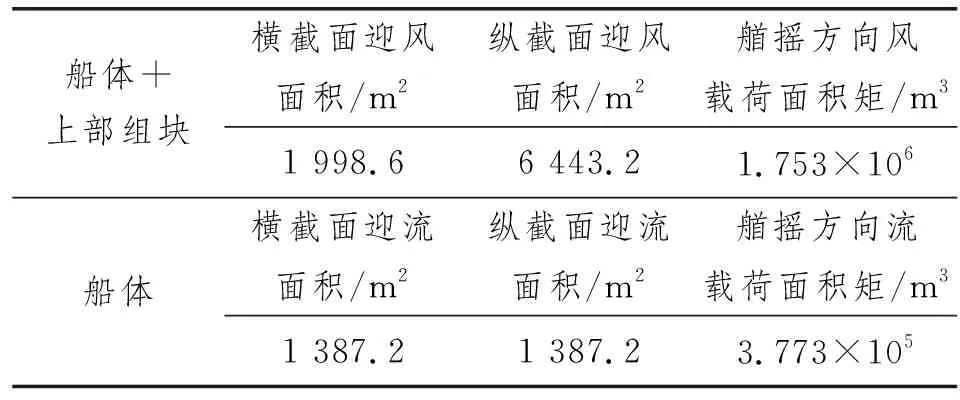
表2 风、流面积参数

图1 风力系数
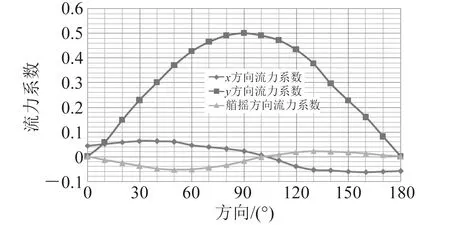
图2 流力系数
1.2 环境条件
根据DNV GL-ST-N001[7]进行动态拖航分析,采用JONSWAP谱拟合波浪,环境条件如表3所示。
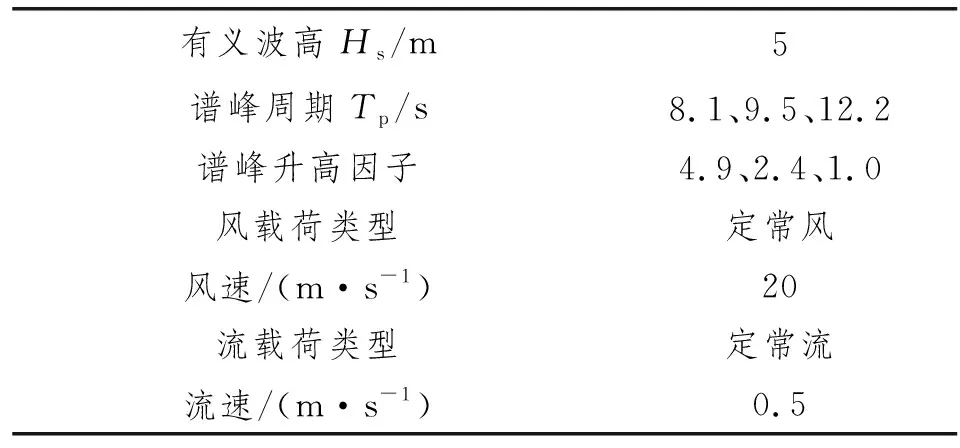
表3 环境条件
1.3 拖缆信息
拖缆具体信息如表4所示。拖缆共2根,拖缆的导缆孔位于FPSO船首甲板,具体位置如表4所示。
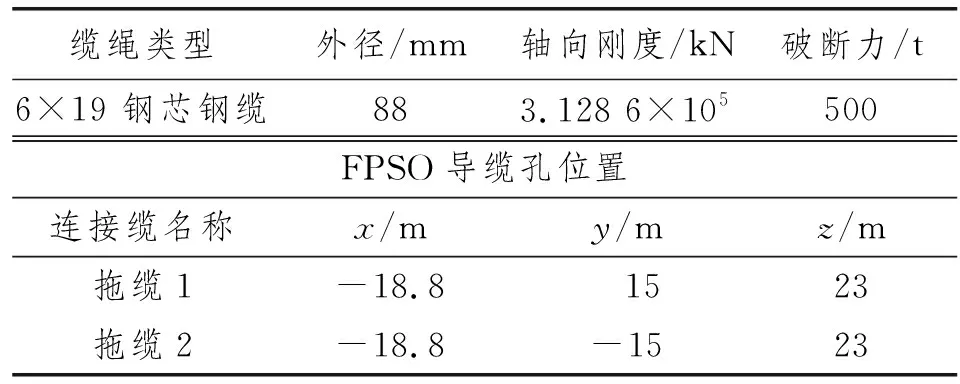
表4 拖缆信息
1.4 FPSO船体阻尼
在时域动态分析中阻尼起到的作用不可忽视。阻尼主要包括辐射阻尼和黏性阻尼。
辐射阻尼可通过水动力计算软件获得。黏性阻尼和黏性力可分为纵荡黏性运动阻尼B′11、横荡黏性运动阻尼B′22、艏摇黏性运动阻尼B′66、艏摇黏性拖曳力M′CY。
黏性阻尼在缺乏模型试验依据的情况下需要通过近似方法进行计算。根据WISHER[8]的方法,油船的线性纵荡黏性阻尼计算式为
(1)
式中:ρ为流体密度,取1.025 t/m3;g为重力加速度,取9.806 m/s2;S为5.1 m吃水船体湿表面面积;v为黏性系数,取1.188 31×10-6m2/s;ω为纵荡运动固有周期。
油船纵荡、艏摇运动黏性阻尼估算式为
B′22=0.5ρgTb22(PF-PA)
(2)
(3)
式(2)和式(3)中:T为船体平均吃水;PF为船首垂线位置;PA为船尾垂线位置;b22和b66为对应系数。当KC数为4时,b22=1.01,b66=1.01。KC数为
(4)
式中:Asway为横荡简谐运动幅值;B为油船型宽。
在OrcaFlex中艏摇黏性拖曳力M′CY[9]为
(5)
式中:ω1为艏摇运动速率;Kyaw为用户指定参数。
假定船体为圆柱体,则艏摇黏性拖曳力为
(6)
Kyaw=CdDL4/32
(7)
式(6)和式(7)中:D为船体吃水;L为垂线间长;Cd为因数,一般取为5。
根据上述方法估算黏性阻尼,如表5所示。

表5 黏性阻尼估算
2 分析方法
2.1 设计要求
通过时域分析给出拖缆的最大张力结果和FPSO运动结果,主要包括:
(1) 拖缆的最大张力应小于拖缆破断力;
(2) FPSO的艏摇运动小于45°;
(3) 在规定海况下FPSO不失去位置;
(4) 拖船的系柱拉力能够满足要求。
2.2 分析流程与工况
主要分析流程如下:
(1) 根据目标FPSO型线建立拖航吃水状态下的水动力计算模型,将水动力数据输入OrcaFlex;
(2) 在OrcaFlex中建立风、流力参数和拖缆模型;
(3) 根据计算工况进行时域分析;
(4) 对阻尼影响进行敏感性分析。
出于保守考虑假设拖船固定。拖船之间距离为100 m,拖缆长度为900 m。环境条件组合包括:
(1) 风、浪、流均指向船首;
(2) 船体迎风、迎浪,流速与风浪方向夹角为30°;
(3) 船体迎风、迎浪,流速与风浪方向夹角为90°;
计算工况如表6所示,每个工况进行5个波浪种子模拟。
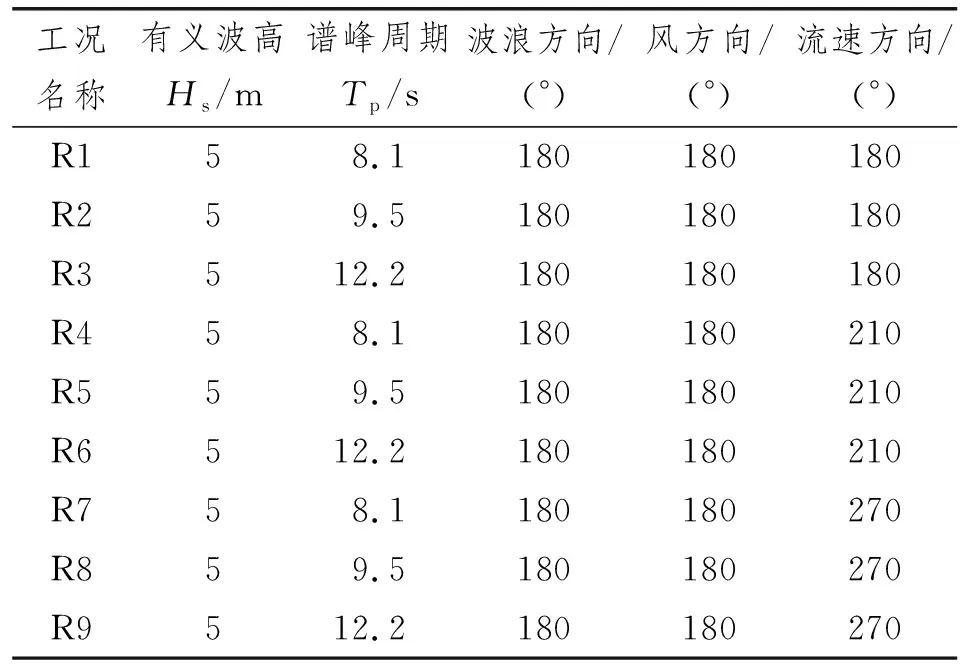
表6 计算工况
2.3 频域水动力分析
WAMIT是一款被广泛认可的三维绕射/辐射水动力计算软件,采用该软件计算船体水动力系数、一阶波浪载荷和二阶差频载荷[10],频域水动力计算采用WAMIT的低阶面元法,船体水动力面元计算模型如图3所示。
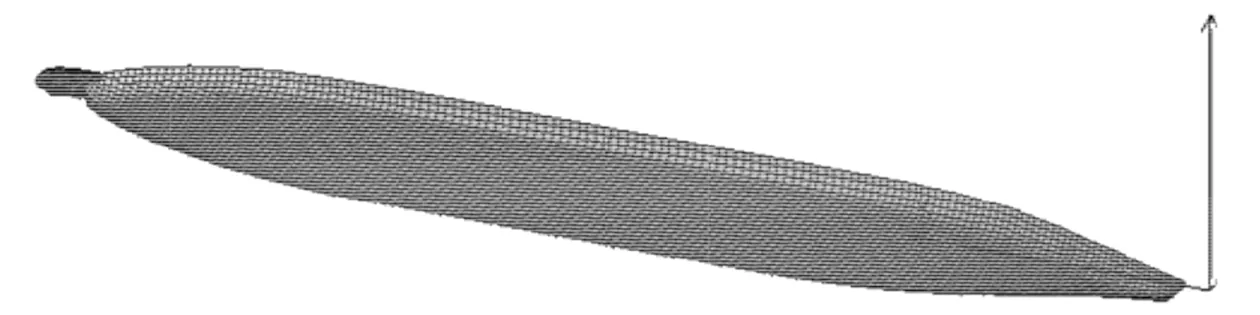
图3 FPSO水动力面元计算模型
2.4 时域全耦合分析
时域拖航计算通过OrcaFlex软件实现,整体计算模型如图4所示。在该模型中,拖缆模型采用三维梁单元计算理论进行计算和模拟,系泊缆被划分为适宜数量的单元。
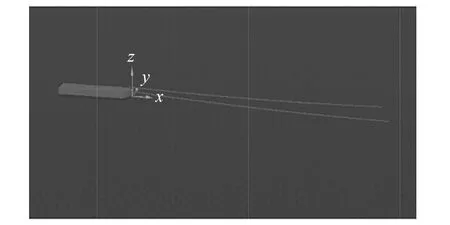
图4 时域拖航耦合计算模型
FPSO的流载荷、风载荷通过流面积、风面积和相关系数来定义。
浮式基础的水动力计算数据从WAMIT导入OrcaFlex。船体的整体运动、拖缆响应等结果完全由时域模拟计算得出,最终给出的计算结果均为5个波浪种子模拟结果的均值结果。
FPSO重心位置6个自由度的运动方程[11]表达式为
[M+A]x″(t)+D1x′(t)+Kx(t)=F(t)
(8)
F(t)=fw,1+fw,2+fw+fc+fo
(9)
式(8)和式(9)中:x为对应自由度运动位移;t为时域模拟时刻;F(t)为对应时刻外界载荷;M为船体的整体质量;A为船体的附加质量;D1为船体的阻尼;K为船体的恢复刚度;fw,1为船体受到的一阶波浪载荷;fw,2为船体受到的二阶波浪载荷;fw为船体受到的风载荷;fc为船体受到的流载荷;fo为船体受到的其他外部载荷。
在时域计算中,船体运动方程表达式为

(10)
式中:A∞为船体低频附加质量;R(t-τ)为船体阻尼迟滞函数;v1为模拟时间步长。
式(9)中的参数通过频域水动力计算程序求解得出。在时域分析中,船体的附加质量和辐射阻尼将转换为迟滞函数作用到时域分析方程中。
3 拖缆响应和FPSO艏摇运动分析结果
拖缆最大张力发生在迎风、迎浪、流速夹角为30°的工况,对应表6工况R4。拖缆最大张力为172 t。FPSO最大艏摇角为26°,发生在迎风、迎浪、流速夹角为30°的工况,有义波高为5 m,谱峰周期为12.1 s。
FPSO最大艏向为17.1°,发生在横流工况,有义波高为5.0 m,谱峰周期为12.1 s,具体结果如表7所示。
对于设计值,在设计海况下拖船的有效比为75%,则拖船系柱拉力为230 t。
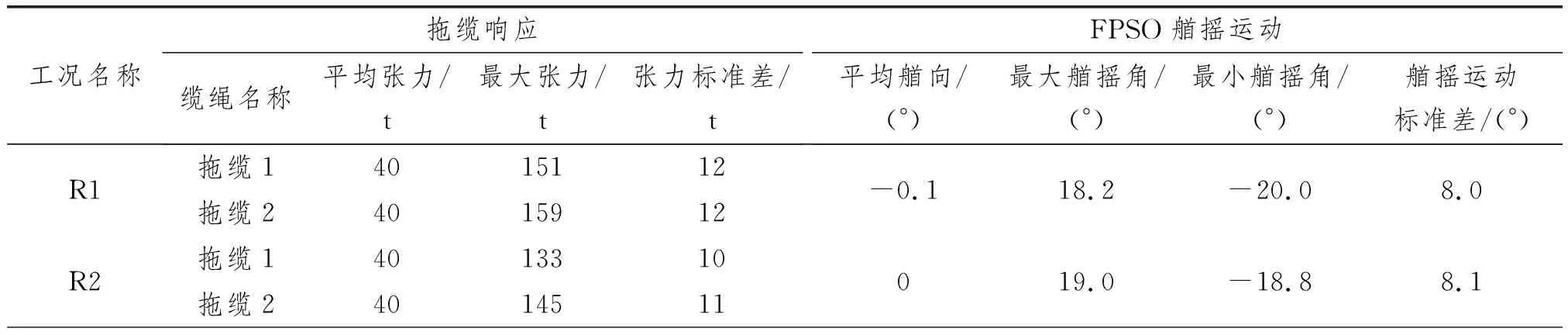
表7 在不同工况下拖缆响应和FPSO艏摇运动主要分析结果
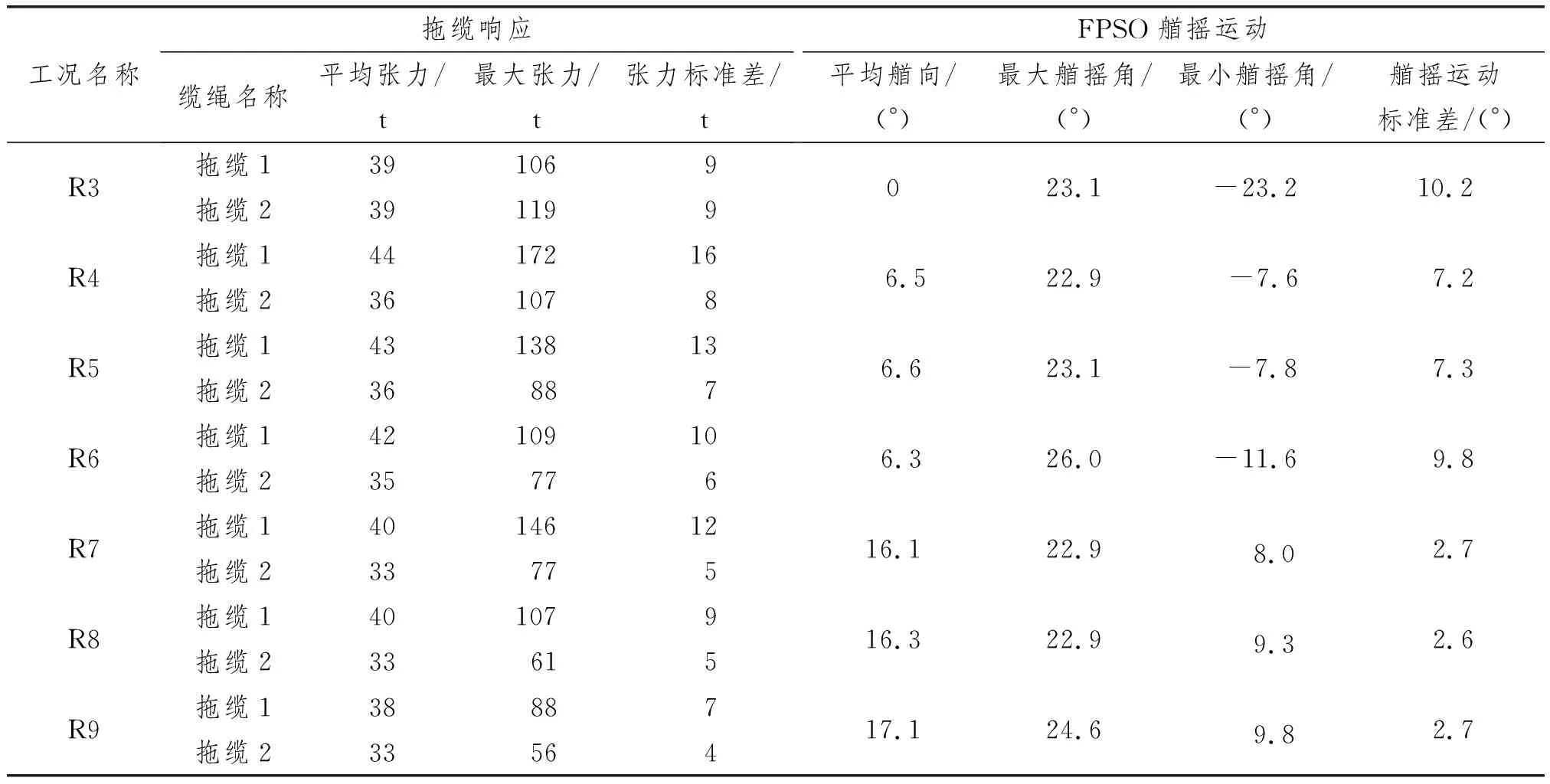
续表7 在不同工地下拖缆响应和FPSO艏摇运动主要分析结果
4 结 论
对某FPSO进行时域动态拖航分析,在有义波高为5 m、风速为20 m/s、流速为0.5 m/s的环境条件下,假定拖船固定,此时拖缆最大张力为189 t,FPSO最大艏摇角为26°,发生在迎风、迎浪、流的夹角为30°的工况下。
在具体分析中由于假定拖船固定不变,拖缆的张力计算偏于保守,拖船系柱拉力要求偏于保守。
在实际操作中应尽可能保持迎浪拖航,避免斜流和横流作用。
更进一步,需详细考虑拖船绞车的参数来进行模拟,以给出更合理的拖缆要求与拖船要求。FPSO船体阻尼情况需要模型试验进行进一步的估计。
猜你喜欢
世界海运(2021年9期)2021-10-08 06:49:30
珠江水运(2020年21期)2020-12-01 08:56:26
珠江水运(2020年16期)2020-09-16 03:28:52
兵工学报(2019年7期)2019-08-28 01:34:34
当代陕西(2019年14期)2019-08-26 09:41:56
传媒评论(2019年4期)2019-07-13 05:49:28
船海工程(2018年5期)2018-11-01 09:15:16
华人时刊(2017年17期)2017-11-09 03:12:03
现代金融(2016年7期)2016-12-01 04:50:21
船海工程(2014年4期)2014-06-27 01:02:50
