考虑通信连通性的输电线路巡检无人机群动态调度方法
2021-02-28 07:50张浩
电气自动化 2021年6期
张浩
(国网安徽省电力有限公司亳州供电公司,安徽 亳州 236800)
0 引 言
随着输电线路网络的发展,输电线路网络空间规模越来越大,需要构建输电线路巡检无人机群动态调度和空间规划模型,结合人工智能的空间技术,在视觉导航和雷达导航环境下,进行输电线路巡检无人机群的动态调度和路径规划设计,提高输电线路巡检无人机群的避障能力和导航控制能力[1]。在通信连通性控制下,构建输电线路巡检无人机群的动态调度和路径规划模型,提高输电线路巡检无人机群的空间智能规划能力,相关的输电线路巡检无人机群动态调度方法研究受到相关研究人员的极大重视[2]。
刘壮等[3]提出输电线路无人机巡检安全距离方法,考虑巡检电磁环境及通信性能,构建±500 kV直流输电线路无人机巡检仿真模型,分析不同巡检距离下电磁分布情况,进行安全距离修正,实现调度。蒋硕等[4]针对无人机协调复杂的情况,提出利用改进的阶层分级粒子群优化算法优化调度问题,划分三个种群调度阶层,调节分配惯性权重,平衡分配任务算法的平衡性,最终实现无人机协同任务分配。Bolourian等[5]针对巡检无人机群调度耗时较长的问题,提出了一种基于激光雷达(LiDAR)扫描仪的无人机桥梁三维路径规划方法。该方法将遗传算法和A*算法结合,考虑到线路缺陷的潜在位置进行调度。该方法计算与关键性级别相关的可视性会导致优先考虑覆盖风险级别较高的区域。
为进一步完善无人机群调度规划性能,本文提出基于通信连通性的输电线路巡检无人机群动态调度方法。构建输电线路巡检无人机调度的通信信道传输和均衡模型,采用网格分块区域规划方法进行输电线路巡检无人机动态调度的参数寻优和路径规划。对采集的输电线路巡检无人机群行驶空间数据进行自适应寻优控制,建立输电线路巡检无人机群飞行空间的三维空间规划模型。采用模糊状态寻优控制方法进行输电线路巡检无人机群路径规划和调度的参数识别和路径寻优,构建输电线路巡检无人机群调度的通信连通性参数分析模型。通过自适应寻优算法,结合码间干扰抑制方法进行调度过程中的抗干扰设计和通信连通性设计,实现输电线路巡检无人机群智能调度。
1 输电线路巡检无人机群调度参数融合及通信信道均衡模型构建
1.1 调度参数融合
输电线路巡检线程复杂,无人机群调度时接收信号量较多,需在通信均衡前进行调度参数融合处理。采用网格分块区域规划方法进行输电线路巡检无人机动态调度的参数寻优和路径规划。将路径参数优化与模糊度控制相结合,对输电线路巡检无人机群动态调度参数进行融合处理。

(1)
采用参量自适应调节的方法[7],得到输电线路巡检无人机群动态调度的空间阵位分布轨迹为xi,yi,zi,Ti,Ui,Vi(i=1,2,…,6)。根据空间分布轨迹,融合调度参数:
R=∑s·|T1+U1+V1|+∑c·|T1+U1+V1|
(2)
式中:s为无人机群目标位置定位误差参数;c为无人机群配置参数命令编号。根据参数融合结果,进行输电线路巡检无人机群动态调度和通信均衡控制。
1.2 通信信道均衡模型构建
无人机群易受信道衰落特性影响通信传输性能,需要均衡无人机群通信信道。根据通信连通性设计方法,进行输电线路巡检无人机群动态调度的寻优控制,建立飞行路径的网格模型[8]。采用一个5元组表示输电线路巡检无人机群动态调度的飞行区域分布网格,计算通信扩散频率,如式(3)所示。
(3)


(4)

2 输电线路巡检无人机群动态调度优化
2.1 无人机群飞行路径规划
建立输电线路巡检无人机群飞行空间的三维空间规划模型,采用模糊状态寻优控制方法进行输电线路巡检无人机群路径规划和调度的参数识别和路径寻优[10]。构建输电线路巡检无人机群动态调度路径的智能规划模型,得到视觉定位的测量误差为:
(5)
式中:N(t)为t个无人机调度节点的个数。在优化控制律下,输电线路巡检无人机群的动态调度路径控制问题转化为n个决策变量寻优问题,计算公式为:
(6)
建立输电线路巡检无人机群动态调度的空间采样模型,通过统计分析和节点规划方法,得到输电线路巡检无人机群动态调度的空间信息测量方程为:
Ki=cosθ+∑s·to
(7)
式中:θ为偏航角。采用最短路径寻优方法,进行输电线路巡检无人机群动态避障处理,得到巡检无人机群的空间规划模型,表示为:
(8)
式中:τ为输电线路巡检无人机群飞行的位置信息;f为信息采样的频域参数;g为输电线路巡检无人机群的自适应寻优系数。采用模糊信息融合和信道扩频处理的方法[11],得到无人机群动态调度的区域规划模型为:
(9)
以最短路径为寻优目标函数,计算视觉导航下输电线路巡检无人机群动态调度路径规划公式,如式(10)所示。
G=z(a)+Q·l
(10)

(11)
式中:A(t)为输电线路巡检无人机群动态避障参数分布初始值。
综上所述,根据飞行路径规划模型,通过自适应寻优算法,动态调度巡检无人机群。
2.2 无人机群动态调度
结合码间干扰抑制方法进行调度过程中的抗干扰设计和通信连通性设计[13],得到输电线路巡检无人机群动态调度的机群分布间隔为d=λmin/4,通过空间位置优化分布,则输电线路巡检无人机群动态调度的通信连通性控制公式为:
j(a)=a2·d+c1
(12)
式中:a2与c1为输电线路巡检无人机群调度通信传输信道的带宽和采样频谱。输电线路巡检无人机群飞行过程中[14],获取任意通信范围内,计算无人机群动态轨迹分布如式(13)所示。
ct=j(a)+A(t)·a2
(13)
式中:A(t)为输电线路巡检无人机群动态调度的模糊域[15]。令A∈Cn×n(n×n维复数空间)则优化的无人机动态调度计算公式为:
(14)
式中: ∂vN(x)为无人机群动态调度的寻优参数的导数。根据导数求极值,实现最优解调度参数。
3 仿真试验与结果分析
为了验证本文方法在实现输电线路巡检无人机群动态调度的性能,在MATLAB2017b平台进行仿真测试。给出输电线路巡检无人机群的个数为30,寻优迭代步数为120,初始无人机X轴与Y轴位置为(0,-150)。根据上述参数设定,得到输电线路巡检无人机群动态调度的网格区域及障碍物分布,如图1所示。
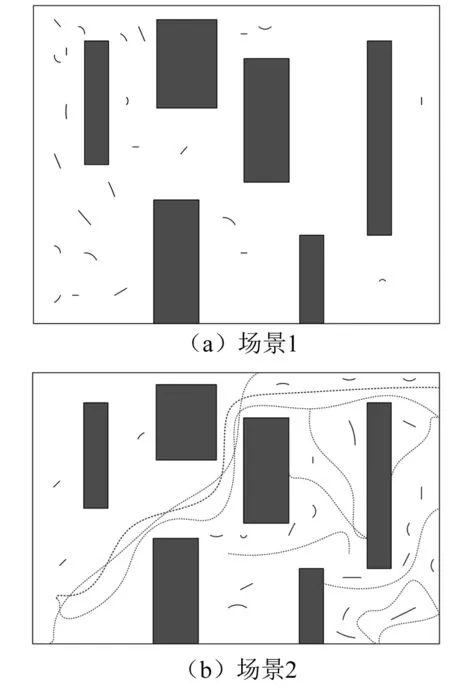
图1 输电线路巡检无人机群动态调度的网格区域及障碍物分布
根据图1的机群动态调度的空间规划分布设计,进行输电线路巡检无人机群动态调度试验,得到优化调度路径,如图2所示。
分析图2可知,本文方法可以在严格(severe)、适度(moderate)、轻微(slight)及无限制(free)的四种飞行路径控制条件下,能够有效实现输电线路巡检无人机群动态调度,输出的空间规划能力较好。
为进一步验证本文方法无人机群调度的准确性,以无人机偏航角误差作为试验指标,验证动态调度的准确性,得到对比结果如图3所示。
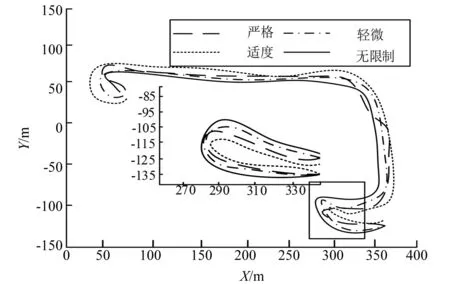
图2 输电线路巡检无人机群动态调度路径
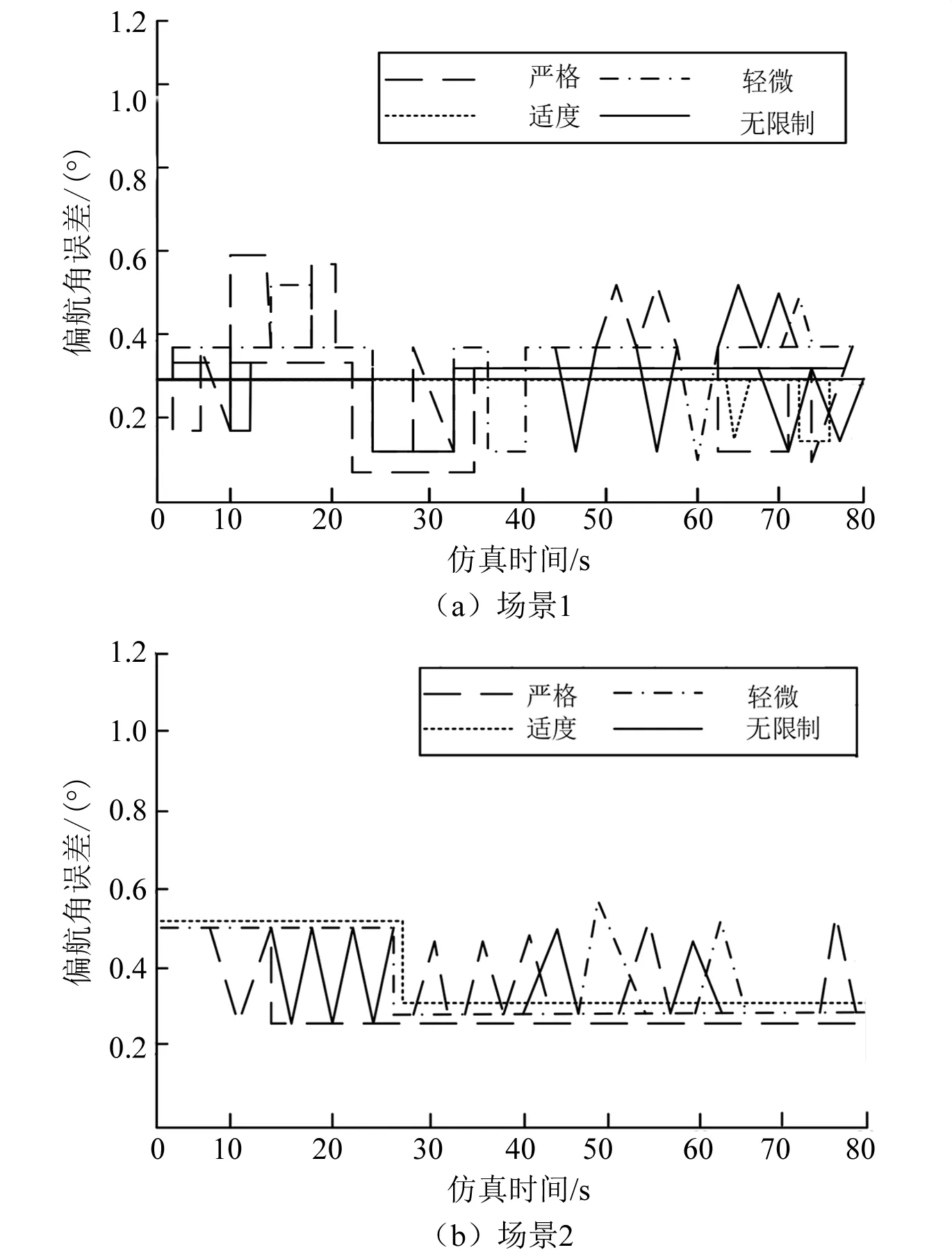
图3 输电线路巡检无人机群偏航角误差对比
分析图3可知,采用本文方法进行输电线路巡检无人机群动态调度的偏航角误差较小。两种场景下偏航角误差均低于0.6°,准确性较高,抗干扰能力较强。
为进一步验证本文方法中无人机调度的性能,测试输电线路巡检无人机群动态调度的输出误码率,将±500 kV直流输电线路直线塔无人机巡检安全距离仿真与试验(文献[3]方法)、改进PSO算法在多无人机协同任务分配中的应用(文献[4]方法)得到如图4所示的结果。
分析图4得知:本文方法进行输电线路巡检无人机群动态调度和通信的误码率较低,最低误码率为3.3%,说明抗干扰性和稳定性较高。因为本文方法构建了输电线路巡检无人机群动态调度路径的规划模型,预先进行路径规划,降低了调度输出误码率。
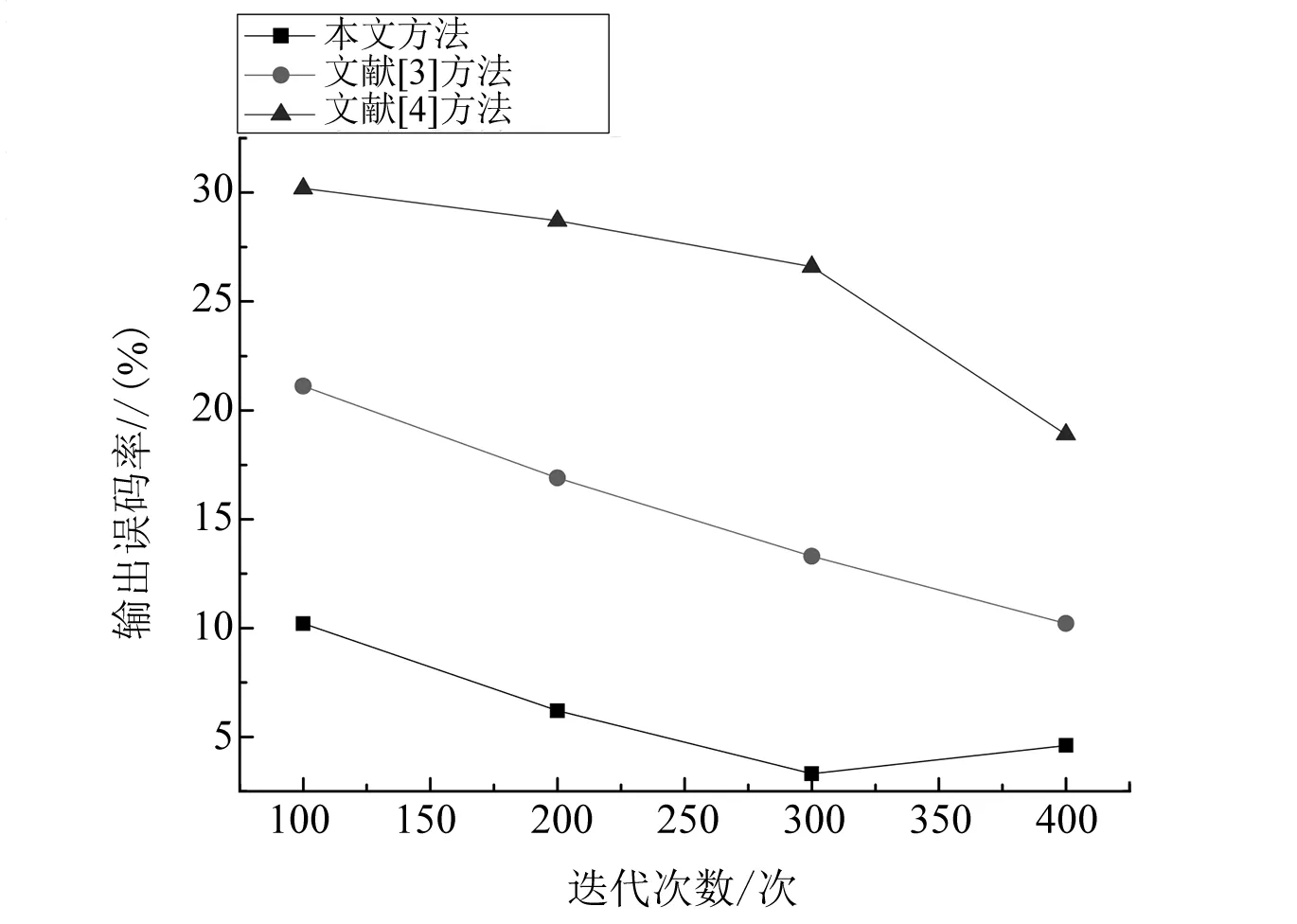
图4 输出误码率测试
4 结束语
构建输电线路巡检无人机群的动态调度和路径规划模型,提高输电线路巡检无人机群的空间智能规划能力,本文提出基于通信连通性的输电线路巡检无人机群动态调度方法。采用无标定视觉伺服控制方法,建立输电线路巡检无人机群动态调度路径的位置参数融合模型,根据通信连通性设计方法,进行输电线路巡检无人机群动态调度的寻优控制,建立输电线路巡检无人机群飞行空间的三维空间规划模型,通过统计分析和节点规划方法,得到输电线路巡检无人机群动态调度的空间信息测量模型,根据导数求极值,实现最优解参数解析和调度。分析得知,本文方法进行输电线路巡检无人机群动态调度的规划能力较好,输出误码率较低。
猜你喜欢
湖南文理学院学报(自然科学版)(2022年4期)2022-10-13
风景园林(2022年7期)2022-07-15
雷达与对抗(2022年1期)2022-03-31
铁道通信信号(2020年10期)2020-02-07
数学物理学报(2019年5期)2019-11-29
北京航空航天大学学报(2019年9期)2019-10-26
成都信息工程大学学报(2019年3期)2019-09-25
三门峡职业技术学院学报(2019年1期)2019-06-27
通信学报(2016年11期)2016-08-16
华南师范大学学报(自然科学版)(2015年5期)2015-11-02