
精密RV减速器输入齿轮轴振动分析*
2021-02-22 08:12:04胡冬益娄军强罗利敏贡林欢李国平
机械制造 2021年2期
胡冬益 娄军强 罗利敏 贡林欢 励 晨 李国平
1.宁波大学浙江省零件轧制与成型技术重点实验室 浙江宁波 315211 2.宁波中大力德智能传动股份有限公司 浙江宁波 315301
1 分析背景
随着智能制造和工业机器人的快速发展,制造业作为现代工业的基石,面临着诸多挑战和机遇。“中国制造2025”明确提出机器人产业发展的两个重点:一是为满足我国制造业转型升级迫切需求,开发工业机器人本体和关键零部件系列优化产品;二是为开发智能机器人着力突破智能机器人关键技术[1]。在此背景下,以工业机器人技术为核心的智能制造技术是我国高端制造和智能制造产业发展的主要方向,对工业机器人精密减速器关键零部件制造技术进行深入研究,具有重要意义和价值[2]。
精密RV减速器作为机器人关节中的核心零部件,由第一级渐开行星传动轮系和第一级摆线轮行星传动轮系串联而成[3]。RV减速器具有小型、轻量、刚度大、寿命长、传动精度高且平稳等一系列优点,在工业机器人领域被广泛应用[4]。但是,RV减速器的制造精度要求高,结构和加工工艺较为复杂,国内外研究人员进行了大量理论分析和试验研究[5]。刘强等[6]对RV减速器输入齿轮与行星齿轮进行建模,并对齿轮间应力应变量进行仿真分析。何卫东等[7]分析了RV减速器中曲柄轴和行星轮的模态特性,通过增大曲柄直径的方法避开整机结构共振。佟佳岩等[8]分析了自由边界与约束边界下的曲柄轴和行星轮模态特性,得到零件最大位移的位置和结构中的薄弱环节。针对接触、摩擦等非线性约束状态,汪久根等[9]建立输入齿轮轴与行星齿轮的刚柔耦合动力学模型,并对整机约束模态进行有限元仿真,为整体振动分析提供参考。由于输入齿轮轴的模态特性与输入齿轮轴所受约束状态密切相关,因此结合输入齿轮轴与行星轮的啮合传动特点,分析啮合状态下输入齿轮轴的固有频率和振型,是分析RV减速器动态传动特性的重要参考,为后续进一步对RV减速器进行动力学特性研究提供理论依据。
2 RV减速器传动原理
以RV-80E减速器为研究对象,减速器主要由输入齿轮轴、行星齿轮、曲柄轴、摆线轮、针齿、针齿壳、法兰架等组成[10]。RV减速器基本结构如图1所示。
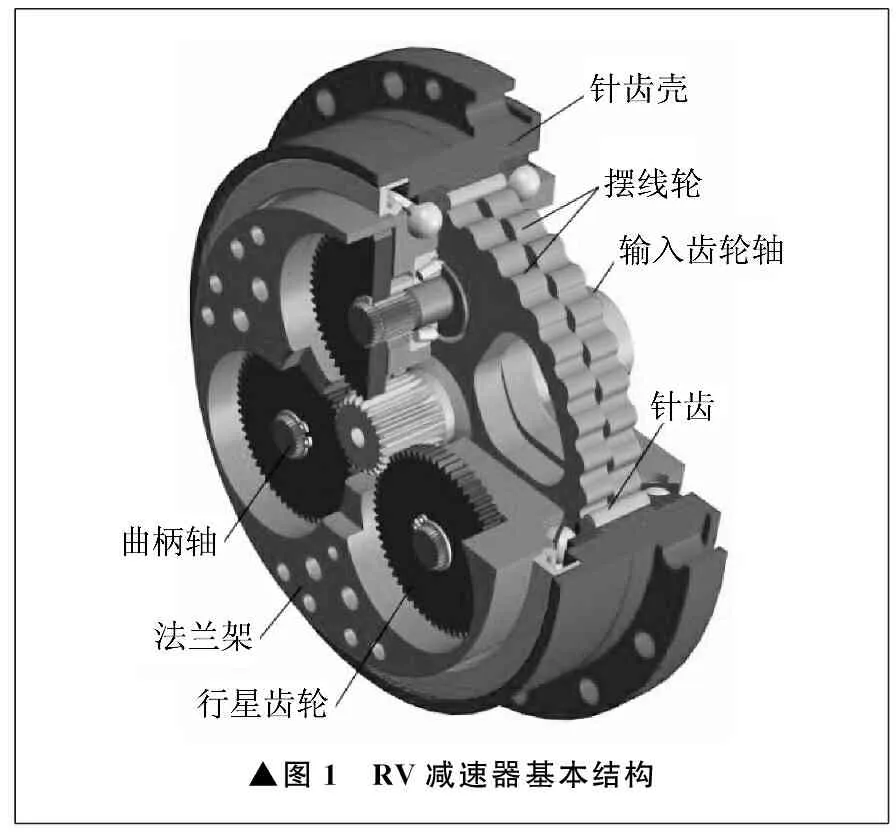
▲图1 RV减速器基本结构
RV减速器通过两级减速实现较大减速比,第一级减速的核心零部件由输入齿轮轴与行星齿轮系组成,第二级减速的核心零部件由曲柄轴、摆线轮、针齿、针齿壳、行星架组成[11]。RV减速器的传动原理如图2所示。
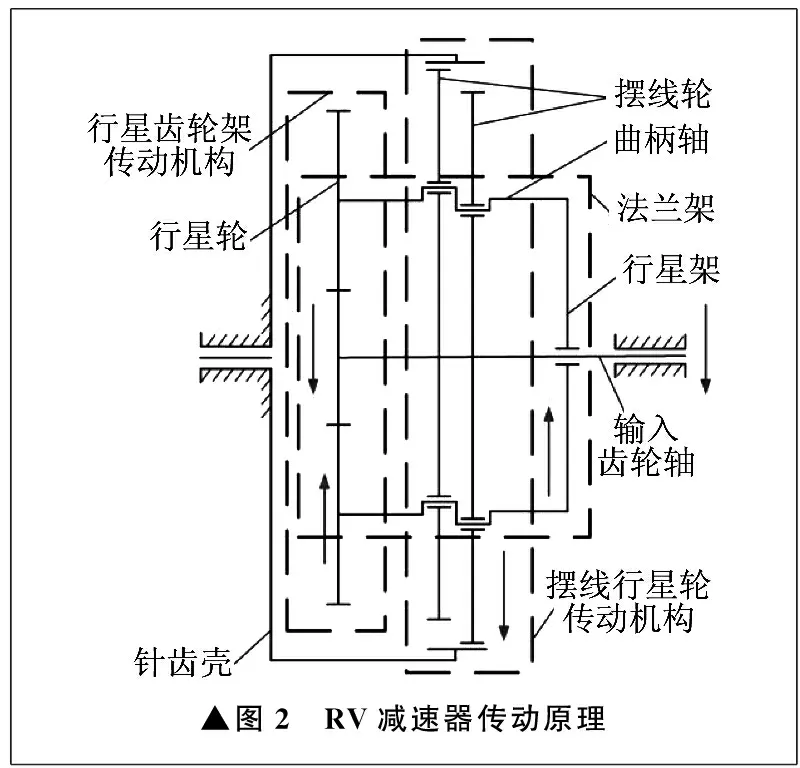
▲图2 RV减速器传动原理
以输入电机固定为实际工况,RV减速器的具体传动过程如下:电机轴与输入齿轮轴通过联轴器直连,驱动输入齿轮轴与行星轮啮合;输入齿轮轴自身旋转,同时带动120°均匀分布的三个行星轮系反向回转,实现第一级减速;曲柄轴与行星轮固连后同速转动,与行星齿轮铰接的两片摆线轮以180°相位差产生偏心转动,并与固定的由针齿和针齿壳组成的针轮通过针齿相啮合,带动针齿壳绕中心轴线公转,从而实现第二级减速[12]。
RV减速器输入齿轮轴是外部驱动电机与行星轮关联传动的重要零部件,输入齿轮轴的传动特性对整机性能有较大影响,而且齿轮疲劳断裂失效及齿面磨损在整个传动过程中存在,分析输入齿轮轴在实际啮合状态下的模态特性,并进行优化,对提高RV减速器整体传动性能至关重要。RV减速器输入齿轮轴和行星齿轮系装配关系如图3所示。

▲图3 RV减速器输入齿轮轴与行星齿轮系装配关系
3 输入齿轮轴模态特性分析
采用SolidWorks软件对输入齿轮轴建模,并将简化后的模型导入ANSYS软件进行分析。输入齿轮轴和行星齿轮材料均为渗碳钢,密度为7 800 kg/m3,弹性模量为207 GPa,泊松比为0.25。综合考虑输入齿轮轴的结构规模及计算精度,定义网格尺寸为1 mm。网格划分后,输入齿轮轴的网格求解模型节点总数为961 919,单元数为697 937。输入齿轮轴网格划分模型如图4所示。
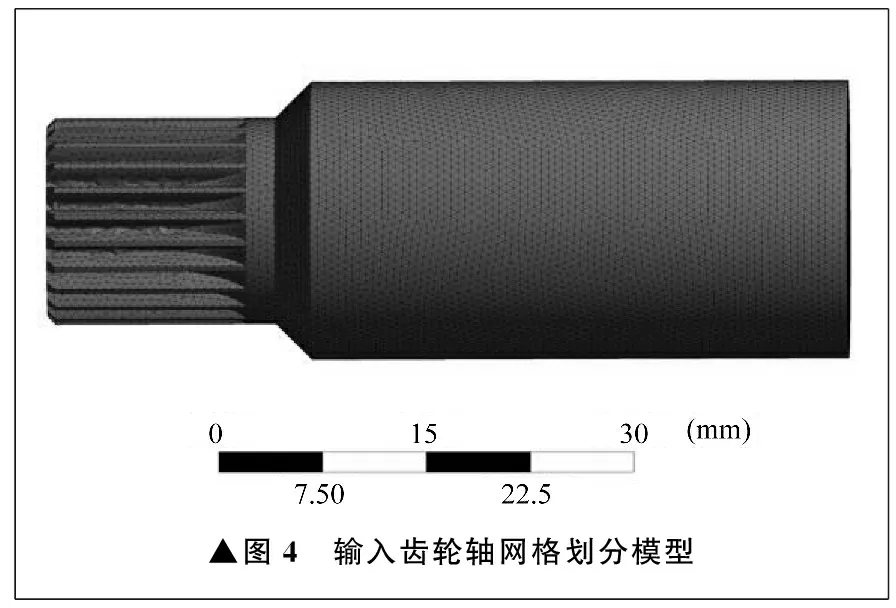
▲图4 输入齿轮轴网格划分模型
分别对自由状态及轴承约束状态下输入齿轮轴的模态特性进行分析,两种状态下输入齿轮轴前十阶固有频率及振型见表1。由表1可以看出,自由状态下输入齿轮轴的固有频率低于轴承约束下输入齿轮轴的固有频率,且靠近输入齿轮轴头部的振型变化较为明显。自由状态下输入齿轮轴一阶和五阶模态振型如图5所示,轴承约束状态下输入齿轮轴一阶和五阶模态振型如图6所示。
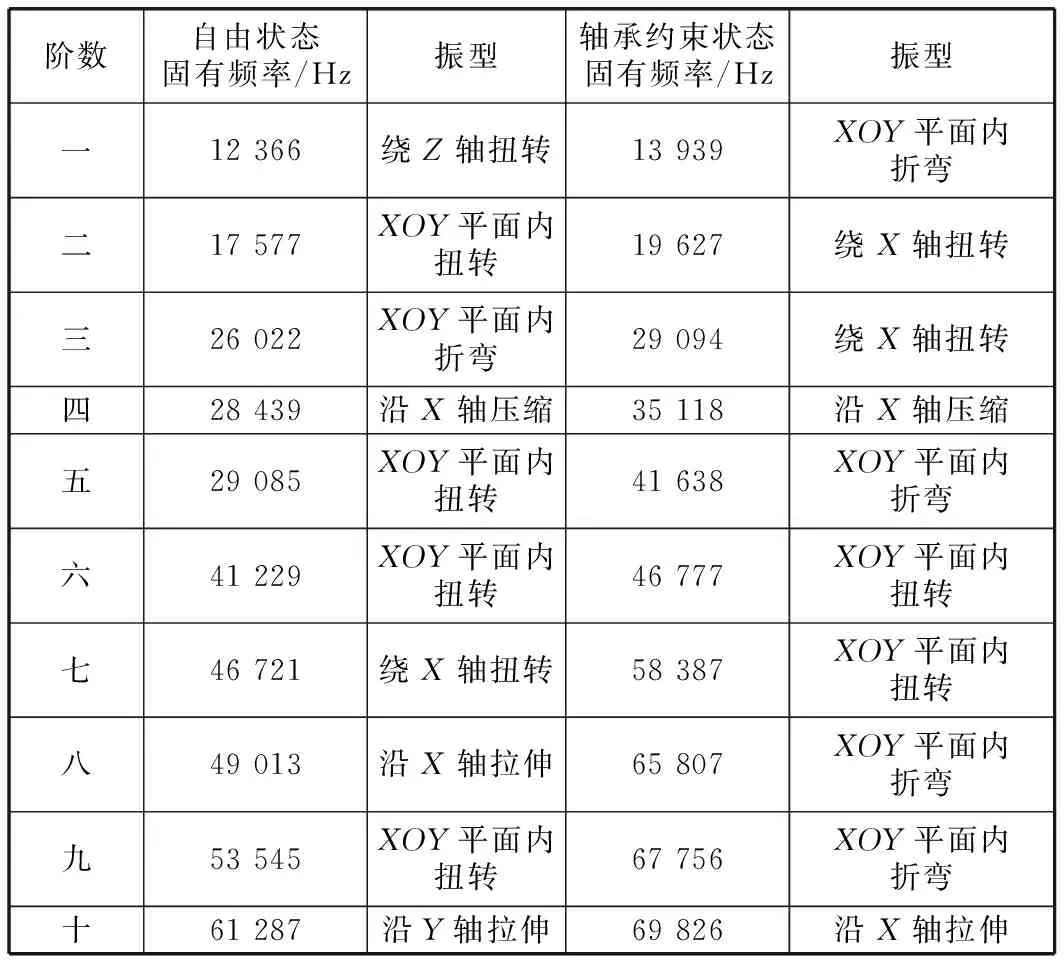
表1 输入齿轮轴固有频率与振型
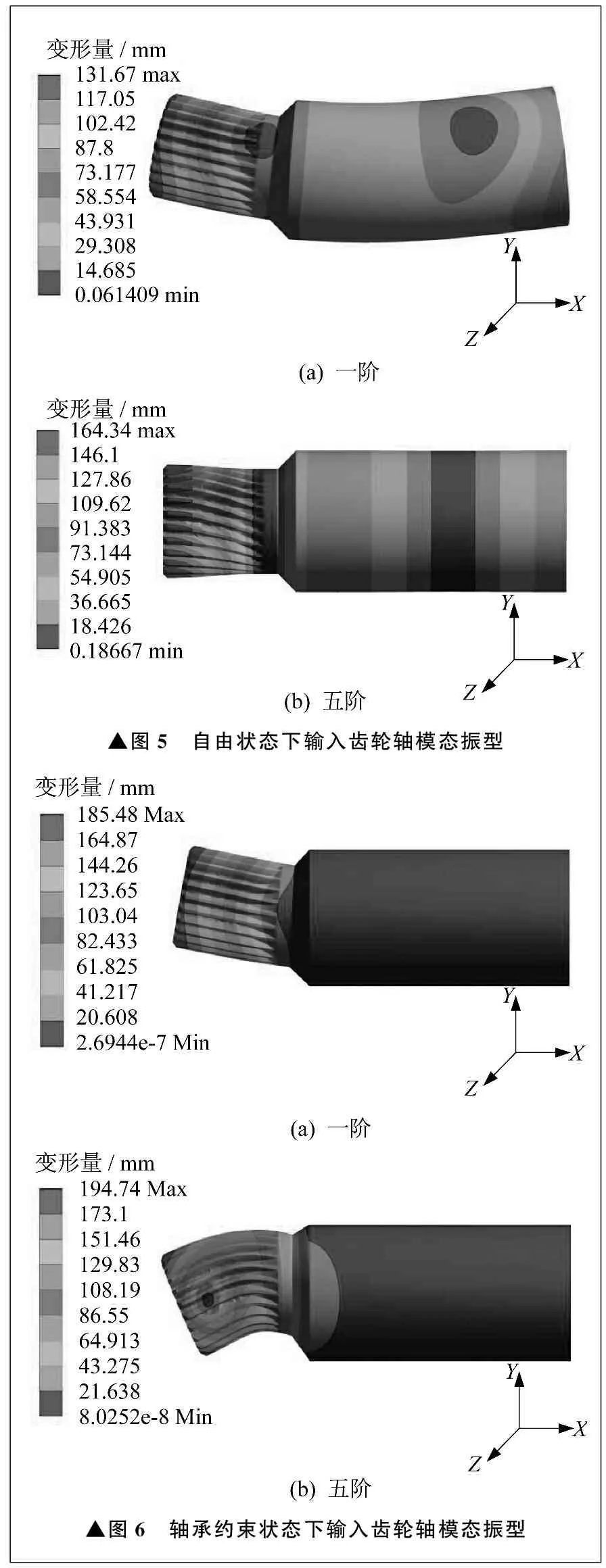
▲图5 自由状态下输入齿轮轴模态振型▲图6 轴承约束状态下输入齿轮轴模态振型
输入齿轮轴在实际转动过程中,通过与行星轮的啮合传递运动和转矩,在受到轴承约束的同时,还受到相啮合行星齿轮的约束。进一步分析输入齿轮轴在轴承约束和行星齿轮约束共同作用下的模态特性,以便能够全面反映输入齿轮轴在传动过程中的传动特性和实际工况。建立包括输入齿轮轴和行星齿轮在内的三维装配关系模型,导入ANSYS软件。
综合考虑结构规模及计算精度,定义输入齿轮轴网格尺寸为1.5 mm,行星齿轮网格尺寸为1 mm,整个模型网格划分后,节点总数为201 779,单元数为61 060。输入齿轮轴和行星齿轮网格划分模型如图7所示。
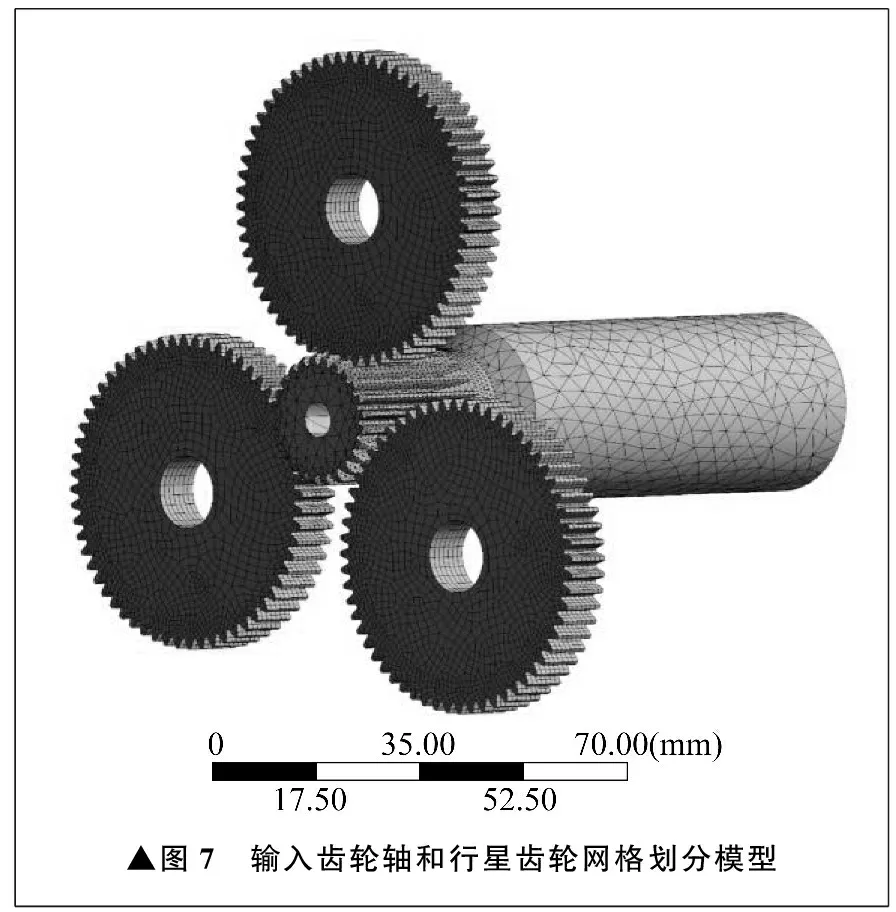
▲图7 输入齿轮轴和行星齿轮网格划分模型
考虑轴承和行星轮对输入齿轮轴的影响,对输入齿轮轴轴向、径向,以及绕Z轴、Y轴旋转的自由度进行约束,保留绕X轴旋转自由度。行星齿轮受到输入齿轮轴的约束,同时还受到曲柄轴的约束,因此,对行星齿轮的轴向窜动、径向跳动进行约束。
啮合状态下输入齿轮轴前十阶固有频率及振型见表2。啮合状态下输入齿轮轴的一阶和五阶模态振型如图8所示。
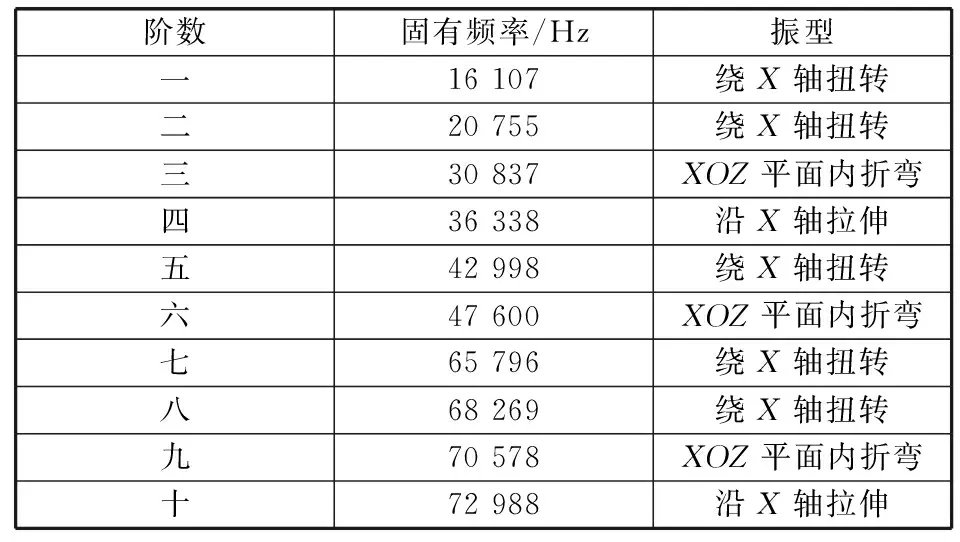
表2 啮合状态下输入齿轮轴固有频率与振型
自由、轴承约束、啮合工作三种状态下输入齿轮轴的前十阶固有频率对比如图9所示。啮合状态与自由状态、轴承约束状态相比,输入齿轮轴的固有频率明显提高。由三种状态下的一阶、五阶模态振型也可以观察到,振动主要集中在输入齿轮轴头部和齿啮合部位。由于受到行星齿轮和轴承约束,输入齿轮轴的振型多为绕自身轴线扭转振动。
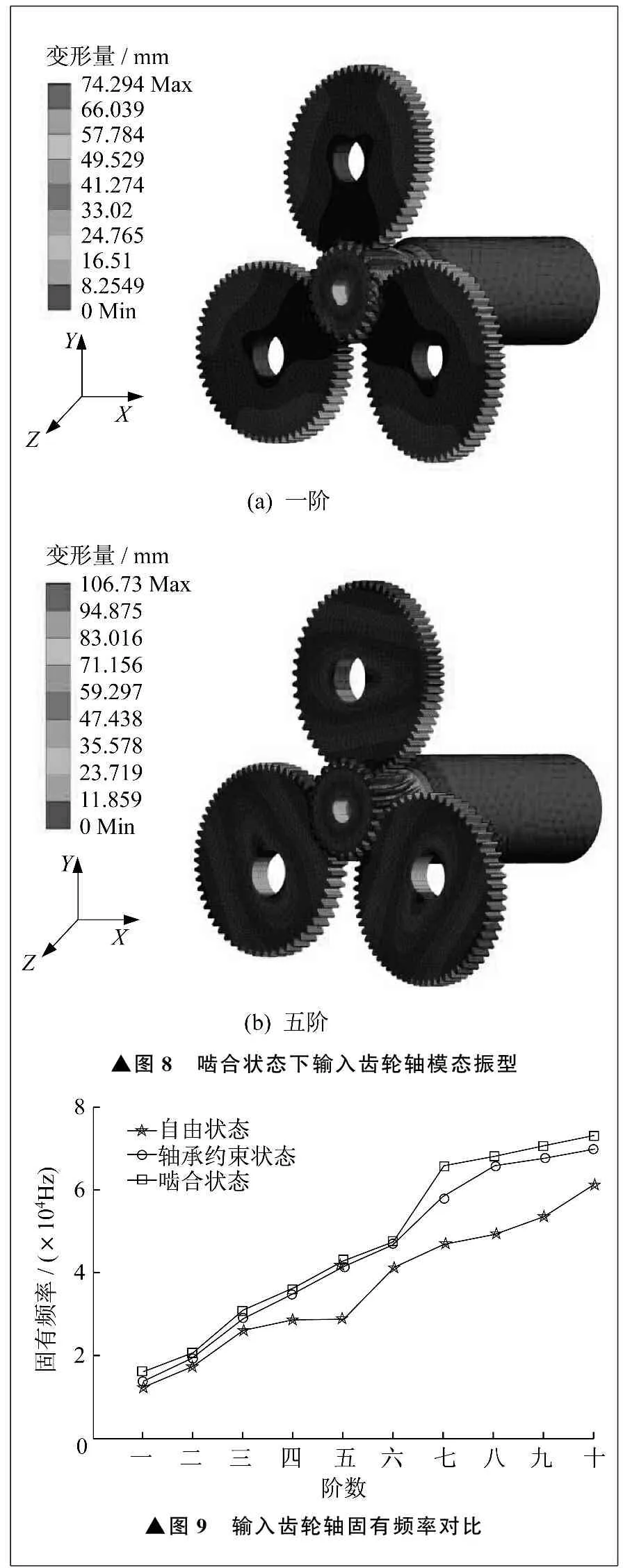
▲图8 啮合状态下输入齿轮轴模态振型▲图9 输入齿轮轴固有频率对比
4 结束语
笔者应用有限元法分析计算RV-80E减速器关键零件输入齿轮轴在自由、轴承约束、啮合工作三种状态下的模态特性,直观分析和对比不同状态对输入齿轮轴固有频率及振型的影响。分析结果表明,在实际啮合工作状态下,输入齿轮轴的前十阶固有频率相比自由和轴承约束状态有明显提高,输入齿轮轴齿端部与行星齿轮啮合处为薄弱环节。因此,在输入齿轮轴的结构设计和分析过程中,要充分考虑输入齿轮轴啮合状态下的模态振动特性。分析结果为找出输入齿轮轴结构中的薄弱环节及后续的结构优化设计提供了参考,同时为避免或减小共振提供了理论依据。
猜你喜欢
力学与实践(2022年5期)2022-10-21 08:10:34
兰州交通大学学报(2022年2期)2022-04-26 10:19:12
装备制造技术(2020年1期)2020-12-25 05:18:10
重型机械(2020年3期)2020-08-24 08:31:50
航空维修与工程(2020年3期)2020-04-10 08:14:10
铁道通信信号(2019年10期)2019-11-25 09:40:54
特种结构(2019年2期)2019-08-19 10:05:52
军事文摘(2018年24期)2018-12-26 00:57:40
现代商贸工业(2016年35期)2016-04-09 06:59:58
大型铸锻件(2015年1期)2016-01-12 06:33:01
