基于模糊神经网络PI控制的频率跟踪控制策略
2021-02-14 03:14高建树张钦伟
中国民航大学学报 2021年6期
高建树,张钦伟,闫 文
(中国民航大学a.机场学院;b.电子信息与自动化学院,天津 300300)
无线电能传输(WPT,wireless power transfer)技术是近年来国内外学者研究的热点,电能可以进行无线传输,具有灵活、安全和方便等优点[1],主要分为电磁辐射式、电磁感应式及磁耦合谐振式3 种传输方式。WPT 技术应用于电动汽车时,主要考虑传输效率、传输功率和传输距离等因素,其中磁耦合谐振式无线电能传输(MCR-WPT,magnetic coupling resonant wireless power transfer)技术能够实现中远距离的高效率、大功率无线电能传输,因此更适合应用于电动汽车无线充电[2-3]。
MCR-WPT 系统的效率受频率影响较大,在实际应用中,系统容易受到某些因素的影响从而导致谐振点偏移,一旦谐振参数发生变化,将会导致系统失谐从而大大降低传输效率。因此,需要采取有效的控制策略来实现谐振频率跟踪,频率跟踪技术可以使MCRWPT 系统工作在谐振频率而不受谐振参数变化的影响,从而大大提高系统传输效率[4]。频率跟踪技术的实现方法有很多,国内外学者大多使用软件算法与硬件相结合的控制方法,如利用模拟锁相环芯片法、扰动观察法、改进粒子群算法等实现对谐振频率的跟踪控制[5-7],但这些方法有一定的局限性。其中:模拟锁相环芯片法抗噪声性能差,不能保证系统的可靠运行;扰动观察法需要周期性扰动系统工作频率,因此会降低跟踪控制的响应速度;改进粒子群算法虽然能实现频率跟踪,但存在计算繁琐、稳定性差的问题。上述方法还存在频率跟踪速度慢或精度不高、抗干扰能力差的问题[8-9],因此不能保证MCR-WPT 系统具有较高的传输效率。
针对现有MCR-WPT 系统谐振频率调节方法的缺陷,提出一种基于模糊神经网络PI(proportional integral)控制的频率跟踪控制策略。模糊控制不依靠精确的数学模型就可以解决复杂非线性系统的控制问题,但其缺少相应的自学习能力,很大程度上需要依靠专家的经验和知识,而神经网络具有良好的自学习和自适应能力[10-11]。结合模糊控制和神经网络,发挥两者的组合优势,实现谐振频率的快速有效跟踪,并且使系统具有更好的抗干扰能力。通过仿真分析,验证了所提控制策略的有效性。该研究对于提高电动汽车无线充电系统的传输效率有一定的参考意义。
1 电路模型建立与特性分析
MCR-WPT 系统主要包括原边、副边电路两大部分,系统由交流电源、整流滤波电路、高频逆变电路、谐振补偿网络、发射线圈和接收线圈及动力电池等部分组成[12-14],MCR-WPT 整体结构如图1所示。
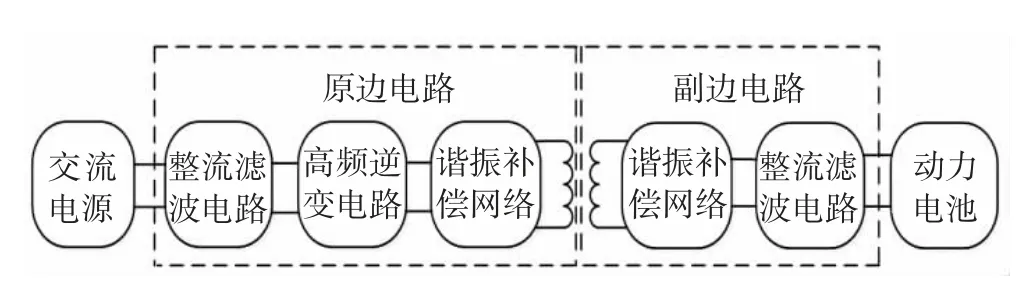
图1 MCR-WPT 系统整体结构Fig.1 Overall structure of MCR-WPT system
MCR-WPT 系统基于电感线圈之间的互感去实现发射线圈和接收线圈之间的相互耦合,从而完成电场能和磁场能的相互转化,实现电能的无线传输,但由于电磁回路中漏感较大,所以存在较大的无功功率损耗,系统的传输效率较低。为了提高系统传输效率,通常使用谐振补偿方式,通过一定的补偿,使系统工作在谐振状态下,以降低系统无功功率损耗。按照发射端、接收端电容与线圈的连接方式,补偿方式可分为串串(SS)、串并(SP)、并串(PS)和并并(PP)4 种拓扑方式,相比于其他3 种拓扑,串串(SS)拓扑的电路比较简单,系统带负载能力较好,更容易获得较高的传输效率,因此选择串串(SS)拓扑作为系统的补偿方式。图2所示为MCR-WPT 系统SS 拓扑的主电路结构。
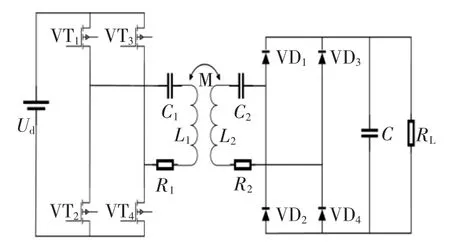
图2 MCR-WPT 系统SS 拓扑的主电路结构Fig.2 SS main circuit topology of MCR-WPT system
在实际运行过程中,MCR-WPT 系统参数如线圈的耦合系数、负载阻值的改变会导致频率失谐,进而大大降低系统的传输效率[15-19]。因此,需要采取有效的控制方法来使系统工作频率与谐振频率保持一致。为解决MCR-WPT 系统在运行过程中的频率失谐问题及现有谐振频率调节方式的弊端,提出一种基于模糊神经网络PI 控制的频率跟踪控制策略。
2 系统控制策略
MCR-WPT 系统存在较多变量,难以准确建立其动态模型,且整流器、逆变器和滤波器等开关器件易造成系统的非线性和时变性,所以采用传统的锁相环对谐振频率进行跟踪控制很难达到预期的效果。模糊控制可以更好地适应系统的非线性和时变性,神经网络面对外部环境的变化具有很强的自学习能力,因此,将两者结合起来可以发挥各自优势,形成一种模糊神经网络控制策略,能够快速准确地对谐振频率进行跟踪控制,从而使系统工作在谐振状态,保持较高的传输效率。
2.1 模糊神经网络PI 控制器结构
模糊神经网络PI 控制器是由模糊神经网络和常规PI 控制器两部分构成,由模糊神经网络对PI 控制器的2 个参数,即比例参数Δkp和积分参数Δki进行在线调整,以增强谐振频率跟踪系统的自适应能力,模糊神经网络PI 控制器结构如图3所示。
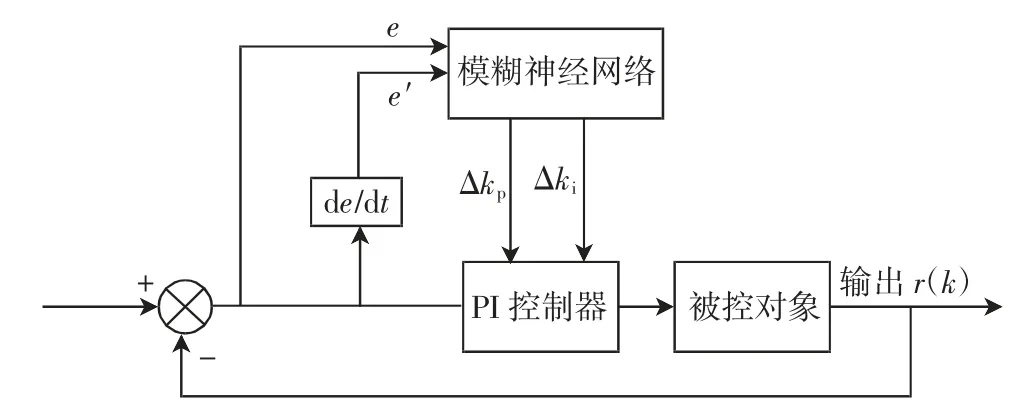
图3 模糊神经网络PI 控制器结构Fig.3 Structure of fuzzy neural network PI controler
2.2 模糊神经网络设计
2.2.1 模糊化模块设计
在MCR-WPT 系统中,相比于接收端,发射端对电路参数变化更为敏感,若发射端电路失谐则系统传输效率明显降低,所以在系统发射端引入谐振频率跟踪系统。该系统主要通过检测发射端电压和电流的相位差Δθ 是否为0,来判断电路是否发生谐振。
模糊控制器的输入变量为发射端电流i 与逆变器输出电压u 的相位差e 及相位差变化率e′,经过模糊化、模糊推理和反模糊3 个步骤获得PI 比例参数和积分参数调节量Δkp、Δki,以Δkp、Δki作为输出,与已经整定的k*p、k*i相加得到准确的kp和ki值。
输入变量相位差e 和相位差变化率e′的基本论域均为[-π,π],模糊化之后的模糊论域取为{-3,-2,-1,0,1,2,3},而模糊语言组成的模糊集采用{NB(负大)、NM(负中)、NS(负小)、Z0(0)、PS(正小)、PM(正中)、PB(正大)}表示。在选择隶属度函数时,由于高斯函数的适应性强,因此输入变量的隶属度函数采用高斯函数,如图4所示。
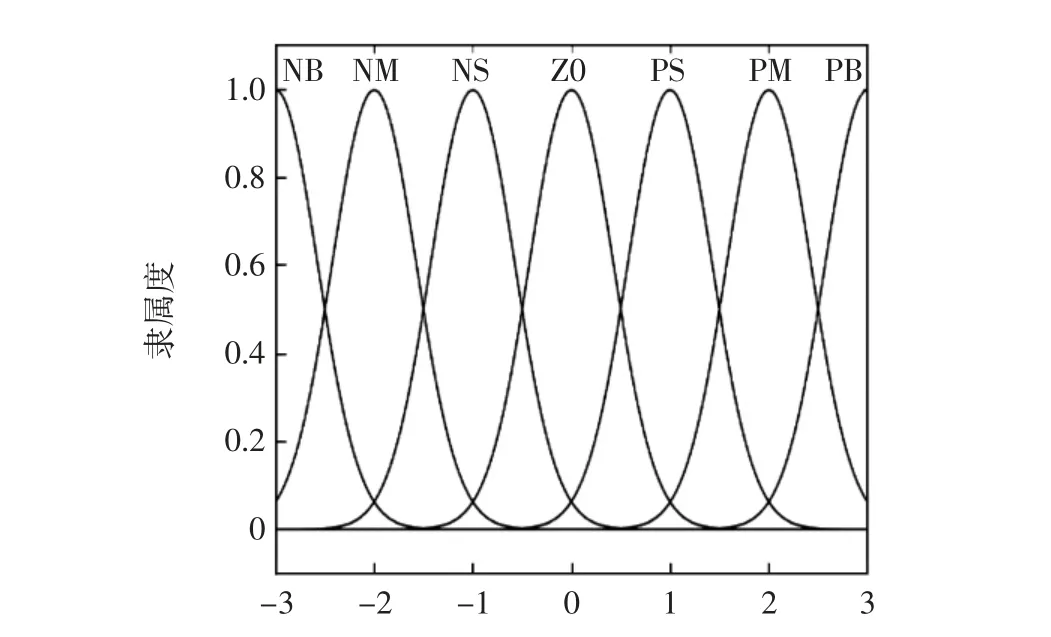
图4 输入变量的隶属度函数图Fig.4 The diagram of membership function of input variables
模糊控制规则的制定非常关键,根据谐振频率跟踪系统中比例参数kp和积分参数ki对PI 控制器动态性能的影响,综合考虑跟踪的速度与精度,对kp和ki的大小进行动态在线调整。由于输入变量相位差e 及其变化率e′各有7 个语言变量值,所以覆盖整个解空间的模糊规则库规则数目由49 条模糊条件语句组成。通过if 控制规则去制定模糊控制规则,此系统输入、输出变量各有两个,所以模糊控制规则可表示为:“if e=A and e′=B,then Δkp=C and Δki=D”。模糊规则库的建立就是为找出kp、ki与相位差e 及相位差变化率e′之间的模糊关系,根据相关专家经验结合实际操作知识获得模糊控制器的控制规则,然后根据模糊控制规则得到模糊化输出,将Δkp和Δki作为模糊控制器的输出量,在频率跟踪控制过程中,根据相位差e的大小及其变化率e′,动态调整PI 参数,以达到兼顾跟踪速度和跟踪精度的目的。
2.2.2 神经网络设计
模糊神经网络包括4 个部分:输入层、模糊化层、模糊推理层和输出层,其结构如图5所示,其中输入层采用二维输入,输入量为相位差e 和相位差变化率e′,输出层也采用两层神经网络结构。
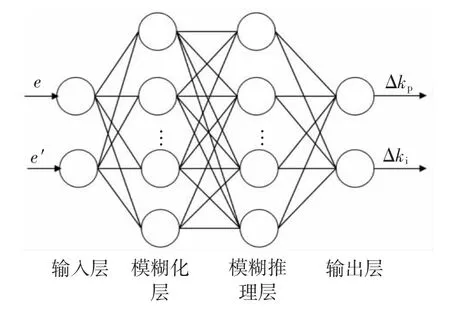
图5 模糊神经网络结构Fig.5 Structure of fuzzy neural network
模糊神经网络每层的处理过程分别如下。
1)输入层
该层含有两个神经元节点,每个节点代表一个输入变量,分别是e 和e′,即该层的输入为x1=e,x2=e′,输出与输入相等,通过激活函数

输出到下一层神经元。
2)模糊化层
该层把相位差e 和相位差变化率e′分别采用7 个隶属函数进行模糊化处理,模糊集为{NB,NM,NS,Z0,PS,PM,PB},模糊论域为{-3,-2,-1,0,1,2,3}。采用高斯函数作为隶属度函数,即
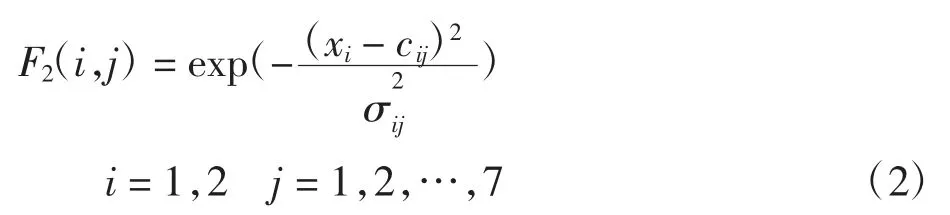
式中:cij为高斯隶属度函数的中心值;σij高斯隶属度函数的宽度。
3)模糊推理层
该层的每个节点代表输入变量与输出变量之间的一条模糊规则,每条对应的模糊规则被用于匹配模糊规则的前件及计算模糊规则的适应度。依照模糊规则数可知该层共有49 个神经元,将上一层中的模糊量两两相乘就可得到本层的输出值,各节点的激活函数可以表示为

4)输出层
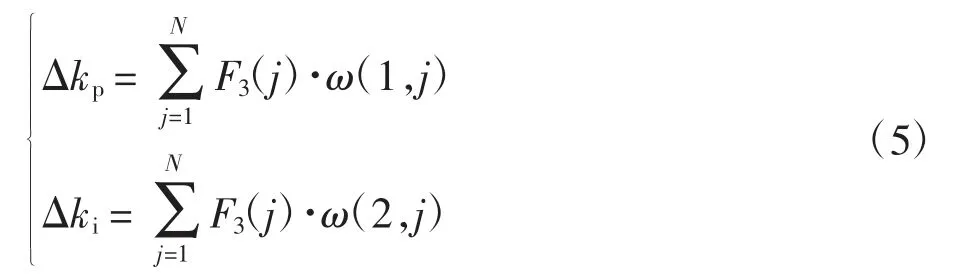
输出层也称反模糊层,该层可以实现清晰化计算,即kp、ki的整定后的结果,其激活函数为

式中ω表示模糊推理层与输出层之间的连接权矩阵。则
2.3 基于模糊神经网络PI 控制的系统整体结构
基于模糊神经网络PI 控制的MCR-WPT 系统整体结构如图6所示,主电路部分前面已有介绍,这里不再赘述。控制电路部分用来实现谐振频率跟踪,包括检测电路、模糊神经网络、跟踪算法和驱动电路几部分组成。首先利用检测电路检测发射端电路中电流与电压信号之间的相位差e 及相位差变化率e′,并将检测结果作为模糊神经网络控制的输入信号,经过模糊神经网络计算与分析,输出合适的Δkp和Δki,与已经整定的、相加得到准确的kp和ki值。跟踪算法用准确的kp和ki值动态调整频率跟踪的速度与精度,最后将经过跟踪算法得到的输出信号经过驱动电路传送给发射端的逆变器,完成对MCR-WPT 系统的谐振频率跟踪控制。
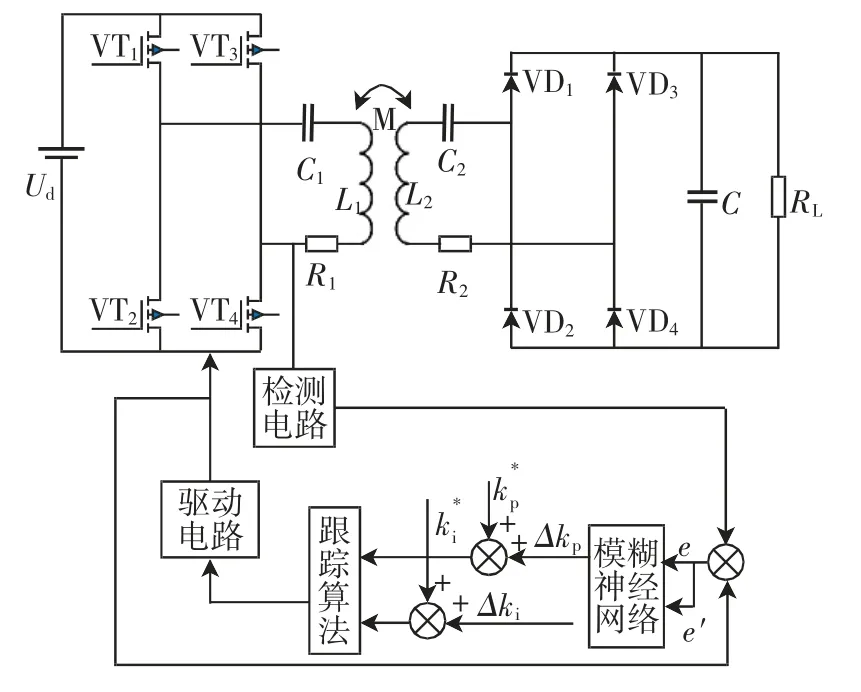
图6 基于模糊神经网络PI 控制的MCR-WPT 系统整体结构Fig.6 Overall structure of MCR-WPT system based on fuzzy neural network PI control
3 仿真与结果分析
为了证明所提控制策略的有效性,在Matlab/Simulink 中建立模型以进行仿真分析,选择阶跃函数作为输入信号,当输出幅值为1 时表示系统达到稳定状态,其中谐振频率跟踪部分别采用模糊神经网络PI 控制、模糊PI 控制和传统PI 控制策略,3 种控制策略的仿真结果如图7所示。
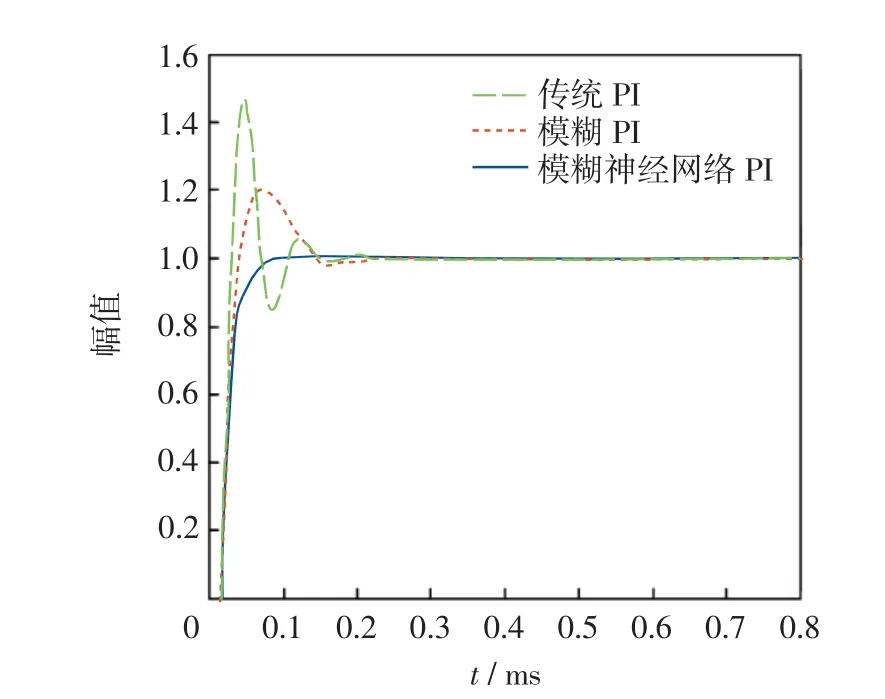
图7 3 种控制策略的仿真结果Fig.7 Simulation result of three control strategies
由图7可以看出:采用传统PI 控制的系统有明显的超调现象,不具备自整定能力,超调量最高为43%,系统达到稳态的时间是0.26 ms,且前期系统存在很大的波动;采用模糊PI 控制策略时,系统超调量为19%,达到稳态时间是0.16 ms;采用模糊神经网络PI 控制的系统无超调量,系统稳态调整时间约为0.1 ms。仿真结果表明,相比于传统PI 控制与模糊PI 控制,模糊神经网络PI 控制的系统具有响应速度更快、调节时间更短的优势。
MCR-WPT 系统在运行过程中容易受到外界的干扰,从而导致系统失谐。因此,在频率跟踪控制策略的研究中,控制系统的抗干扰能力是需要重点考虑的因素。为了验证模糊神经网络PI 控制在受到干扰情况下的性能是否优于传统PI 控制和模糊PI 控制,对控制系统在0.4 ms 时加上大小为0.5 的脉冲干扰信号,系统响应曲线如图8所示。
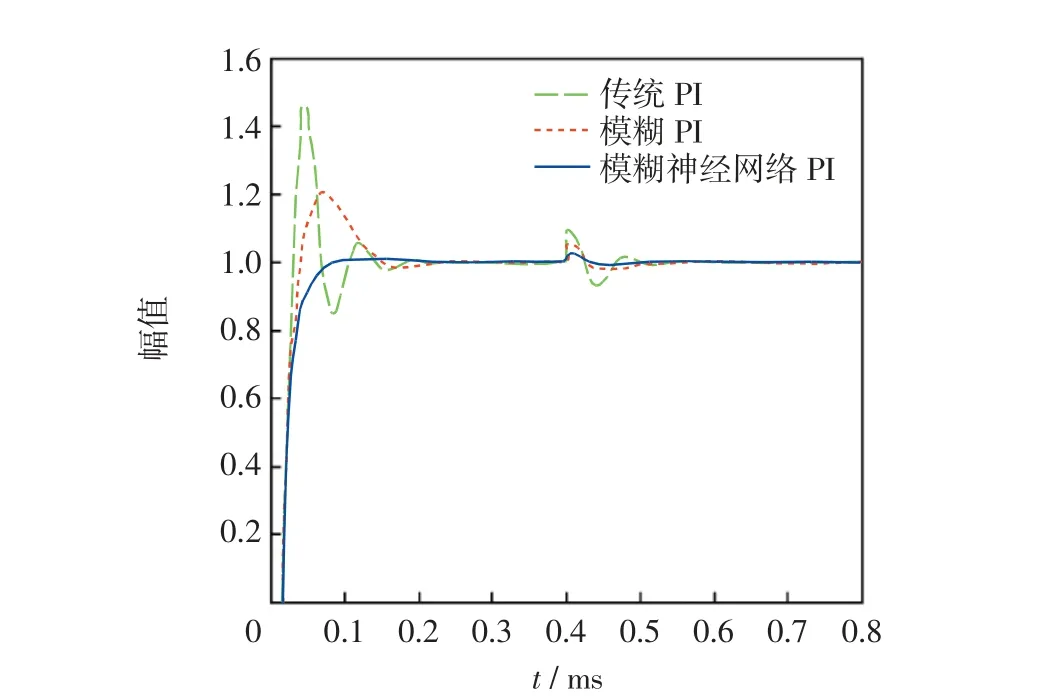
图8 加干扰后的仿真结果Fig.8 Simulation result with P-interference
从图8可以看出,系统在0.4 ms 增加干扰后,模糊神经网络PI 控制的系统超调量最小、调节时间最短。由此可以看出模糊神经网络PI 控制具有更好的抗干扰能力和更强的鲁棒性。因此将这种控制策略应用于MCR-WPT 系统频率跟踪过程中,能增强系统的抗干扰能力,从而有效解决系统在运行过程中受到干扰所产生的频率失谐问题。
4 结语
针对MCR-WPT 系统在运行过程中容易产生频率失谐问题,提出一种基于模糊神经网络PI 控制的频率跟踪控制策略,该策略将模糊控制和神经网络的优势相结合,当系统受到影响出现频率失谐问题时,该策略有较强的抗干扰能力,可以快速准确地完成对谐振频率的跟踪控制。为验证控制策略的有效性,利用Matlab/Simulink 建立控制系统的模型,并分别对3 种控制策略的频率跟踪部分及增加干扰信号后进行仿真,仿真结果表明,模糊神经网络PI 控制策略更加稳定,响应速度更快,抗干扰能力也更强,可以更快地达到谐振频率跟踪的目的。该策略能够提高频率跟踪的精度与速度,对于提高电动汽车无线充电系统的传输效率具有参考意义。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
厦门大学学报(自然科学版)(2022年4期)2022-07-15
防爆电机(2022年3期)2022-06-17
能源工程(2022年2期)2022-05-23
现代装饰(2020年7期)2020-07-27
电子制作(2019年7期)2019-04-25
电机与控制学报(2018年9期)2018-05-14
卷宗(2017年1期)2017-03-17
商(2016年28期)2016-10-27