基于无人机的下滑天线外场信号检测与分析
2021-02-14 03:14:10瞿淳清
中国民航大学学报 2021年6期
瞿淳清
(中国民用航空华东地区空中交通管理局设备维修中心,上海 200335)
民航空管专业涉及范围广、设备种类多,导航设备中的仪表着陆系统在飞机进近过程中起着关键作用。随着航空业的逐年发展,设备加速更新使得运行保障要求不断提高,然而对应的维护手段缺少技术革新。导航设备维护及系统检测方法以静态测试为主,大多直接通过监控天线来获取特定空间信号的数据,虽然方便快捷,但监控位置单一,且获取的是近地端数据。此外,通过具有移动属性的外场测试仪及手持测试天线进行检测,其优点是位置选取更灵活,缺点是人力成本高、测试效率低下。某些大型机场还配备移动测试车辆,可以动态测试航向信号的水平分布值,如上海浦东国际机场的导航测试车可以升高天线来做下滑(GP,glide path)信号的垂直信号测试,虽然可获取连续信号的分布,但设备升降不便、速度缓慢,且车载设备易损坏、测试风险大、维护成本高。以上信号采集方法虽然丰富多样,能满足不同场景、各种导航设备的测试需求,但测试都在近地端,无法真实反映高空信号的情况。另外,各类测试手段几乎都受限于地形地貌,即便是移动测试车辆也只能在平坦且空旷的环境下作业。
鉴于以上缺陷,考虑在空中进行电磁信号的实时侦测,一方面避免地面多径效应,另一方面解除地理环境的限制,捕获连续、多方位、立体空间的信号。近年,在无人机控制应用方面出现了通过小型无人机天线测试系统实现厘米级系统定位技术[1],可获取更高的定位精度。在飞行校验前能对无线电助航设备进行初步验证的无人机系统[2]能够实现简单的飞行功能,对于特定要求的飞行姿态缺乏高效自动控制手段。旋翼无人机加载功能模块后,可以对无人机有效控制[3-4],实现空中悬停,为获取特定位置的信号提供了有效方法。信号探测方面[5-6]的技术日趋成熟,无人机飞行姿态多样化使得多架无人机可以同时进行多点定位和信号检测,对于超高频段(GHz),捕获信号稳定,并实现了一些简单的导航设备在线监测[7]和飞行校验[8]功能。然而,在具备指定飞行功能并精准捕获有效信号的基础上,更需要拥有与飞行校验飞机配套,甚至比飞行校验更合理的算法,才能获得具有较高参考价值的结果,从而与飞行校验得到的结果进行对比。目前获取信号关键参数的算法很少,且甚高频段的机载接收设备较为庞大,影响飞机的灵活性和飞行高效性。
首先以工业无人机为平台,通过搭载轻便机载接收设备获取宽频段(100 MHz~3 GHz)信号,加载具有高效精准定位能力的双GPS 定位系统,实现空间信号的有效捕获。相比于校飞飞机,六旋翼无人机拥有稳定的悬停功能,在垂直方位上,获取更精准、更稳定的空间信号。以下滑信标为测试对象,对飞行难度高、数据意义大的校飞中的关键参数——入口高度(TCH,threshold crossing height)进行试探性分析。通过建立下滑天线空间信号模型,分别对下滑天线的近地和高空信号展开垂直剖面分析,结合飞行校验数据处理方法,用最小二乘法拟合得出入口高度。此研究可为以后导航外场测试提供有效检测手段,并为飞行校验中的关键、难调参数的验证提供依据。
1 飞行方案介绍
1.1 场址及跑道情况
测试机场的参考地理位置坐标为N24°32′39″,E118°07′40″(WGS-84),机场标高为18 m,磁差为-2°,跑道长宽为3 400 m×45 m,具体如表1所示。
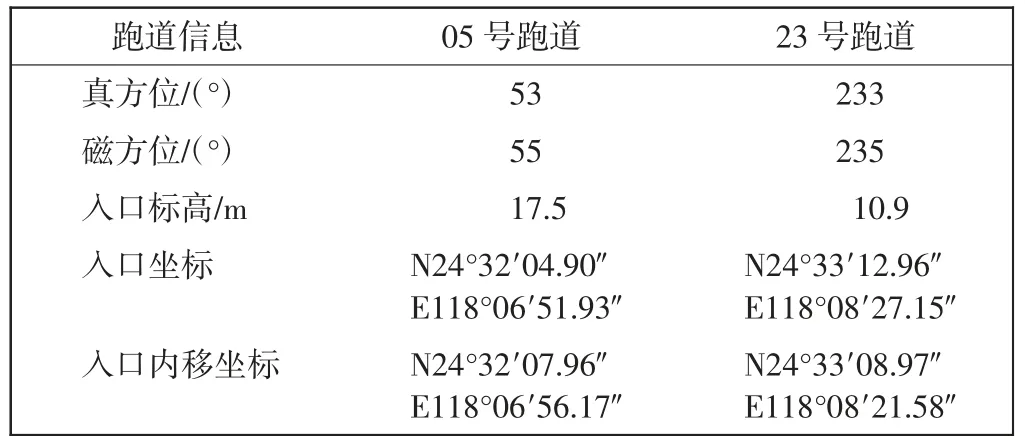
表1 跑道规划数据Tab.1 Runway Planning Data
因地形原因,两个方向的入口标高相差6.6 m,其中23 号跑道外侧数百米,即05 号跑道航向天线阵后方不远处,已划分于机场保护区之外,再经过约20 m长的土坡,毗邻公路,路面方向与跑道方向垂直,公路外侧紧靠大海。
1.2 飞行方法
无人机具有垂直起降、指定轨迹移动、空中悬停等飞行功能,可实现对空间调制度差(DDM,difference in depth of modulation)和射频(RF,radio frequency)信号的采集。现对23 号跑道的下滑天线进行外场信号检测,主要包括以下两方面:①通过指定经纬度信息,在该位置捕获垂直梯度的RF 数据,从而获得信号在垂直面的覆盖分布;②通过跑道中心线延长线上的经纬度信息,在下滑道所在垂面,距离23 号跑道入口不同水平距离位置,在该点垂直升降,获取对应经纬度上DDM 的垂直分布数据,由DDM 零点确定对应高度位置。根据距离跑道入口300~1 830 m 范围的DDM 零点位置进行数据拟合,由拟合曲线外推至跑道入口上方位置点高度,即入口高度[9]。
考虑飞行效率,将地面工作站设定于机场保护区以外,海岸与05 号跑道航向天线阵之间的草坪作为无人机起飞点,便于无人机直接向海面上方的下滑道方向飞行。因地形复杂,从海面往跑道方向,中间依次是公路、土坡、草坪,每个位置海拔高度均有较大差异,如图1所示,其中:土坡为20°斜坡,而草坪高度不平整;T 为入口高度;F 为天线阵前方295 m 位置测试点;D 为无人机距跑道入口的距离。对于下滑信标,垂直精度对飞机进近到着陆起关键作用。为消除无人机起飞点相对于下滑天线基座高度的差值,获取正确的入口高度值,从以下两方面入手:①每次选定相同起飞点(无人机以起飞点高度作为基准高度),确保所有数据相对于下滑天线基座的高度差相同;②根据垂直覆盖分布,以下滑基础位置为基准计算RF 垂直分布曲线,与实测值对比,确定与起飞点的高度差。
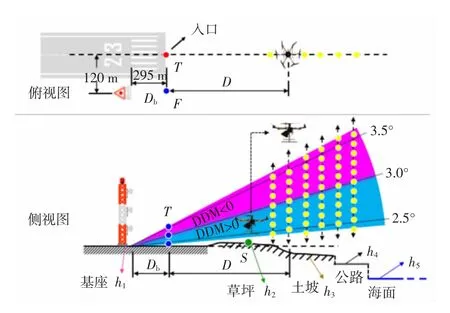
图1 场地及飞行示意图Fig.1 Terrain and flight procedure
图2给出了无人机检测外场信号的总体实施框图。通过事先在接收机设定待测下滑天线工作频率以获取所需信号。无人机在空中接收到信号并处理后,通过数传天线将结果馈送至地面站;无人机机身的GPS模块通过飞控天线与地面站进行位置信息传输。在近场情况下,可以通过遥控器直接控制无人机,在远场情况下,通过地面站进行定位和测试数据观察。操作人员通过控制终端操控无人机空中作业,并进行实时监控。
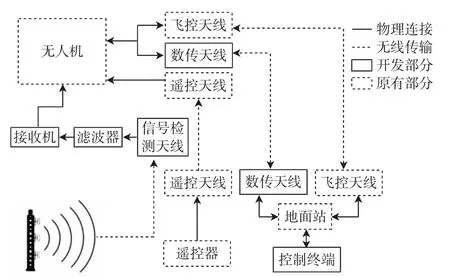
图2 总体实施框图Fig.2 Block diagram of overall arrangement
1.3 无人机数据处理
无人机根据测试位置的经度、纬度、高度(以起飞点作为基准)飞行到指定位置点和位置区域进行测试,主要检测的无线电参数为RF、DDM 和TCH,其中:RF 通过自主研发的微型频谱仪进行检测;DDM 通过解调载波调制信号分别检测90 Hz 和150 Hz 调制度,并进行差值计算所得;TCH 通过目标区域段的采集数据点进行最小二乘法拟合曲线,外推至入口上方的高度值所得。目标区域段的理想值是在跑道中心线延长线上,距离跑道入口300~1 830 m。在实测过程中,通过选取距离跑道入口整百米的点,在其对应经纬度的3°仰角附近垂直飞行,获取DDM 分布并得出DDM 零点高度。各DDM 零点相对于跑道入口点的水平距离与各测试点相对于跑道入口点的水平距离一致,构建数学模型如下

式中:xi,yi表示第i 个DDM 零点相对于跑道入口点的水平距离和高度;ξi表示随机误差;β0表示截距;β1表示斜率;n 表示DDM 零点数量。由上式建立拟合曲线为

式中:β0′表示截距β0的估算值;β1′表示斜率β1的估算值。根据式(1)和式(2)获得残差为

将β0′和β1′代入式(3)中,获得线性回归方程为

2 不同位置信号分布的比较
下滑天线实物模型参数以当地机场23 号跑道数据为标准。M 型下滑天线[10]工作频率f=333.2 MHz。航道发射功率PCOU=6 W,余隙发射功率PCLR=0.6 W。关于下滑天线辐射信号的数学模型可参见文献[11-12],因篇幅所限,不再赘述。
2.1 下滑信标信号分布
在下滑角3°上方DDM<0,机载接收设备给出往下飞行的指示,飞机偏离下滑道越远,指针偏离中心距离越大[12],反之亦然,DDM 分布如图1侧视图所示。近场情况下,在天线正前方所在直线和跑道中心线的两个平行位置,信号分布会产生明显差异,现选择图1俯视图中跑道入口中心点和F 点所在位置,通过模型计算对载波(CSB,carrier and sideband)信号展开分析。
2.2 跑道中心线信号分布
在跑道中心线上,距入口300、200、100、0 m 共4个位置,逐一计算0°~7°仰角范围的航道和余隙信号分布,如图3所示(θ 为仰角)。航道信号的分布特点为:低角度信号很小,高角度信号依次增大,直到下滑角3°的两倍时,信号又回归零点,随着向入口方向推进,信号幅度整体变大,且波瓣往高角度方向移动(信号零点值从6°往7°方向移动)。余隙信号的分布特点为:在0°~6°范围内存在2 个波瓣,第1 个波瓣填补航道信号在低角度的信号分布,在下滑角3°位置附近达到信号最小值,以抑制对航道DDM 的干扰;第2 个波瓣随着距离的变化也会发生偏移。
图3 跑道中心线的天线垂直辐射场型Fig.3 Vertical radiation pattern in center line of runway
2.3 天线正前方信号分布
在近场情况下,天线正前方信号分布如图4所示,其分布与跑道中心线分布的情况有明显差异:在低角度下,相比于跑道中心线航道信号幅度有明显提升;余隙信号原本在下滑角位置的最小值,随着向天线方向距离的靠近,幅度迅速上升,对于距离跑道入口0 m垂面,在0°~7°范围内,下滑角位置对应的幅度变为波峰。此外,航道信号和余隙信号均会在6°仰角上出现最小值,不随水平距离变化而发生改变。
图4 天线正前方的天线垂直辐射场型Fig.4 Vertical radiation pattern in front of glide path antenna
故对于近场测试,优先选择天线正前方位置进行射频数据采集,仰角在6°零点是确定的,便于与实测数据对比分析。
3 数据采集与分析
3.1 飞行航线
无人机在机场保护区以外的草坪上固定点起飞,根据经纬度信息(WGS-84 坐标),飞至23 号跑道入口内移坐标位置(N24°33′08.97″,E118°08′21.58″),再向磁北144.45°方向飞行120 m,抵达天线阵正前方295 m位置。在垂直方向10~40 m 高度(理论仰角2°~7.5°),每间隔0.5 m 对RF 信号采样。如图5所示,左侧为谷歌实物俯视图,右侧为跑道入口和下滑道DDM 采集点的经纬度坐标分布图,方框内为跑道位置参数。
图5 下滑道数据采集示意图Fig.5 Diagram of GP data collection
3.2 射频分布特征分析
由于M 型下滑天线航道和余隙的发射通道彼此独立,在此分别将两个信号独立列出。根据天线阵结构特征,给出了下滑天线正前方后撤距离Db=295 m位置,高度0~40 m(仰角0°~8°)航道及余隙的RF 分布,如图6所示(H 为测试点高度)。图6中在31 m 位置,航道和余隙信号同时存在覆盖分布的最小值(对应图4中6°仰角所在位置)。
图6 实测射频信号高度分布Fig.6 Vertical pattern of tested RF signal
将测试数据与计算结果进行比对,可以发现在实测37 m 位置存在射频最小值,由于地形的高度差异,此位置相对于天线基座的高度是31 m,也就是天线阵反射面对应的6°仰角位置。
3.3 调制度差分布特征分析
对于DDM 数据采集,分别给出了与跑道入口距离D 为300、400、800、1 400 m 的4 个不同距离下的分布情况,如图7所示。
图7中给出数据是下滑道附近及下滑道以下位置的DDM 模型计算值与该位置的无人机实测值。由不同位置可以看到,实测值对应高度均高于计算值,高度差ΔH 在5.5~6.0 m 范围。
图7 调制差信号高度分布Fig.7 Vertical pattern of DDM signal
3.4 误差修正
对上述实测分布的起飞高度差进行修正,将测试曲线整体向左平移ΔH=6.0 m。无人机装载的接收天线为宽频天线,对应下滑频段333.2 MHz 的信号增益为-30 dB,进行增益补偿后,将高度分布的实测信号进行误差修正处理,如图8所示。与计算得到的航道和余隙信号比较,在H=15 m 以下数据,实测与余隙信号分布曲线吻合度良好;而在15~25 m 高度区间,实测强度大于余隙值,且分布特征不同,由捕获效应可知,这个位置应该由航道信号覆盖,但计算得到的RF 分布数值整体大于实测值,现对航道信号的计算值进行调整,将RF 值整体下调9 dB。调整后的航道曲线与原始的余隙曲线共同构成的CSB 信号,与实测值吻合度极高。
图8 修正后的射频信号高度分布Fig.8 Revised vertical pattern of RF signal
对于航道RF 修正的解释:在近场情况下,射频信号分布与远场分布特征有着明显差异,不能简单地通过自由空间损耗来评估信号强度。然而与实测比对,由计算得到的余隙信号不用修正,而单独对航道信号进行了9 dB 的修正,一方面与航道发射机的实际发射功率、航道发射电缆损耗、ADU 的配比调节及发射通路中各节点的老化情况等有关;另一方面也与信号合成算法有关,需要通过选取更多不同水平距离的垂直梯度才能进行进一步分析。
4 入口高度计算
采集下滑道数据时,为保证起飞位置与天线基座保持相同高度差,依然选择与天线阵正前方RF 数据采集相同位置起飞,逐一检测距离入口不同位置的DDM 垂直梯度分布,在仰角2.5°~3.5°范围内,每间隔1 m 测试记录。无人机可以在空中悬停,通过微调升降主动寻找DDM 零点,获取精确的高度信息。
4.1 入口高度算法
在理想情况下,下滑道上的DDM 零点构成的轨迹是双曲线。在飞行校验的飞机进近过程中,通过追踪下滑道DDM 零点,根据距入口水平距离300~1 830 m 区间的轨迹,外推至跑道入口上方的一点,其高度即为入口高度。这个高度比入口上方DDM 零点对应的高度低。
通过无人机从距入口300~2 000 m 区段,每间隔100 m 进行DDM 零点高度的捕获,并检测每个位置仰角扇区为2.5°~3.5°的DDM 垂面分布。具体飞行位置参数如表2所示。
表2 入口高度测试位置Tab.2 Testing location of TCH
4.2 标称模型
根据下滑天线距离入口的水平距离(后撤距离Db=295m),可以计算得到标称情况下的入口高度T 为16.04 m,如图9所示。入口高度与天线正前方的反射区平整度、纵向坡度(FSL,forward slope)、后撤距离有直接关系,后撤距离越大,则入口高度越高;纵向坡度越大,为构成与水平面成3°的下滑角,天线安装高度需要抬高,从而导致入口高度的降低。如:当Db=300m,无坡度(FSL=0°)时,对应入口高度T 为16.30 m;当Db=295 m,FSL=0.1°时,上、中、下3 个天线中的下天线高度由4.30 m 抬高至4.44 m,导致对应入口高度T 降为15.50 m。
图9 基于标称值的入口高度拟合Fig.9 Fitting of threshold crossing height by nominal value
模型的计算过程中,在下滑道采样区间300~1 830m内,可以选择足够多的数据样本进行拟合计算。对于不同采样精度,计算得到的拟合结果有轻微差异。以100 m 间隔距离采样,得到入口高度T 为16.06 m;间隔距离为50 m 时,入口高度T 为16.05 m;间隔距离为5 m时,入口高度T 为16.04 m。计算结果表明,对于平整场地,入口高度的拟合结果对采样密度的依赖性不强。在实际情况下,天线阵前方反射场型不平整,存在对应反射点的突变,使得下滑道对应DDM 零点位置偏移,从而影响下滑道结构,致使入口高度产生变化。
4.3 实测模型
在飞行校验过程中[13-15],通过观察仪表指针,驾驶员不断人为追踪DDM 零点,以此飞行轨迹进行入口高度的外推计算,这个追踪轨迹并不能完美地贴合在下滑道上。而在无人机测试过程中,可通过悬停和升降微调,获取精确的DDM 零点高度,从而进行数据拟合。图10根据实测值的零点高度,在所有采样数据中,选取等间隔数据,拟合得出入口高度T 为15.04 m,实测得到的结果比标称模型的计算值降低了1 m,23号跑道在2019年12月的飞行校验中,得到的最终入口高度T 为16.70 m。这个差异产生的原因与跑道入口前方的地形有关,在飞行校验时,飞机是对连续测量值进行评估计算,而无人机是通过有限单一点进行测算,可能某些位置的DDM 抖动或因地形变化而引起下滑道上DDM 零点位置突变有关,而这些特殊位置没有在无人机检测点中。在后续检测中,将会考虑选取更多采样点加入计算。
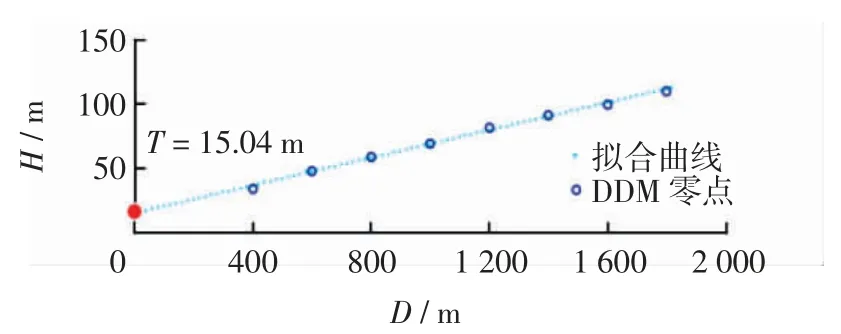
图10 基于实测值的入口高度拟合Fig.10 Fitting of threshold crossing height by tested value
5 结语
通过无人机搭载接收系统开展了空间射频和调制度信号的连续性检测,大幅度提升了下滑信标的监控范围,提供了高效的数据采集方法,丰富了下滑天线重要参数的检验手段。根据近场和远场的计算数据展开实证性分析,更全面地掌握了在用设备的外场信号情况。
在后续工作中,近场情况下,无人机系统需要提升垂直方向的定位精度,更有效、精准地评估垂直梯度信号分布特征;远场情况下,扩大测试空间范围,进行信号覆盖和下滑角的检测功能开发,为飞行校验提供充分的事前准备。
猜你喜欢
数理化解题研究(2020年13期)2020-05-07 03:29:02
数学物理学报(2019年5期)2019-11-29 07:46:30
中国铸造装备与技术(2017年6期)2018-01-22 01:50:04
留学(2017年5期)2017-03-29 03:03:54
高中生·天天向上(2016年9期)2016-11-22 09:10:34
电测与仪表(2015年1期)2015-04-09 12:03:02
电测与仪表(2015年19期)2015-04-09 11:32:44
设备管理与维修(2015年9期)2015-03-16 02:24:04
水道港口(2014年1期)2014-04-27 14:14:38
水道港口(2013年3期)2013-04-27 14:14:28