液体自输送功能性表面及其应用
2021-02-03 09:00孙鹏程郝秀清牛宇生徐文豪张靖辰何宁
表面技术 2021年1期
孙鹏程,郝秀清,牛宇生,徐文豪,张靖辰,何宁
(南京航空航天大学 机电学院,南京 210016)
液体,尤其是水,几乎渗透到生物体生命活动的方方面面[1-2]。从光合作用到呼吸作用,液体通过各种形式塑造着生物机体的生活[3-4]。然而,这一切都离不开液体的相转变、吸收、输运等。因而,深入地了解和学习液体的操纵在人类科学历史上一直有着举足轻重的地位。大多数液体的输送均是在机械压力的作用下完成的,需要外界能量的输入,这往往会造成能量的损失[5]。研究如何在不依靠外界能量,仅仅依靠固体自身的表面特性实现液体的运输,对于减少能源浪费具有重要的意义。
自然界中一些动植物经过自然选择,进化出了一些独特的功能性表面来实现液体的收集和自输运,从而实现特定的功能。例如:荷叶表面展现出极强的疏水性和极低的粘附性,位于其表面的水滴极易滚落并带走其表面的灰尘,使得其表面展现出优异的自清洁性能[6];生活在沙漠中的一种甲虫,其背表面具有独特的润湿分配,可以将湿润的空气中的水分收集并逐渐汇聚成小液滴,在重力的作用下,小液滴最终在表面的润湿差异性的作用下,将液体定向输送到甲虫的口器中,从而使得甲虫能够在极端干燥的环境中生存下去[7-8];生活在沙漠中的仙人掌依靠其锥体针刺表面可以收集空气中的水分,液滴可以从针的尖端运输到宽端,从而实现液体的输运[9],以适应极端干燥的环境;蜘蛛依靠其蜘蛛丝上面锥形的纺锤体,实现将空气中的水分收集并运输,以满足其对水分的需求[10]。通过对这些表面进行微观形貌和表面润湿性分析可以发现,其表面上独特的微纳尺度结构使得表面产生独特的固-液接触状态。与此同时,这些微结构结合其表面上特殊的表面能,使得位于其表面上的液体能够实现定向的自输送。众多研究表明,拉普拉斯压差梯度引起的表面张力分力以及毛细力等,被认为是这些动植物表面能够实现液体定向输送的潜在机理[11-12]。
受自然界这些液体自输送功能性表面的启发,研究者通过各种制备方式制备出仿生功能性表面,这些表面在微流控[13]、油/水分离[14]、集水[15]等方面发挥着重要的作用。总的来讲,这些制备方式可以分为两种,分别是自下而上和自上而下的制备方式。其中,自下而上的制备方式指的是在某一基体表面通过增材的技术构建所需要的微纳结构,主要有3D 打印[16-17]、化学沉积[18-19]、静电纺丝[20-21]、溶胶凝胶[22-23]等。例如,基于双光子聚合3D 打印可以构建任意3D 微纳米结构,其分辨率可以达到100 nm 以下。LIU Xiao- jiang 等[24]利用基于双光聚合的3D 打印技术制备了三维立体结构,使得液体能够不浸入到微结构之间,从而具有极强的超疏水性。Seong Kyung Hong 等[25]通过静电纺丝制备了具有多孔结构的均匀纳米纤维膜,该纤维膜具有水下超疏油性,可以实现油/水分离,且该膜的油/水分离效率超过99%。GAO Shou-jian等[26]通过溶胶-凝胶法将TiO2纳米粒子涂覆在单壁碳纳米管膜上,制备了超亲水性和水下超疏油的柔性超薄膜。这种涂层具有均匀的纳米级孔隙,再利用TiO2的光响应润湿性,可以实现分离无表面活性剂和表面活性剂稳定的水包油乳液的功能。自下而上方式的优点在于可以在分子甚至原子尺度控制表面的微观形貌,从而实现对微结构的精确控制。然而,由于其制备工艺较为复杂,且需要专门的设备来实现加工制备,因而严重限制了这种方法的运用。自上而下的方法主要是通过雕刻或蚀刻将材料塑造成所需要的形态,将更大尺度的材料塑造成更小尺寸的微/纳米结构。自上而下的制备方法主要包括光刻[27-28]、激光刻蚀[29-30]、微细铣削[31]等。WU Pei-jing 等人[32]利用光刻技术制备了基于布料的微流控分析设备,该技术可以在布料上精确地复制亲水性-疏水性图案。Zhang等人[30]利用激光刻蚀技术在铝板上成功制备出润湿图案化表面,楔形的超亲水区域被外围的超疏水包围,该表面可以实现水汽的收集和定向输运。自上而下加工方法的优点在于可以实现大面积的微结构制备,缺点在于无法实现精确的原子或者分子尺度上形貌控制。
综上所述,尽管功能性液体自输送表面的制备方式和功能作用多种多样,但其离不开对表面微结构和润湿性两者的调控。又由于表面微结构和润湿性两者结合条件下,对液体的静态和动态特性综合影响较为复杂,且众多的研究多为其中某一润湿状态[33-34],缺少对这些润湿形态的总结与概括,因而有必要对众多的自输送表面进行分类与总结。同时,众多的综述多集中在液体自输送功能性表面制备及其应用,鲜有人涉及到自输送表面的设计原则、种类以及其输送原理。因而,本文将在阐明固-液接触机理的基础上,从液体自输送表面设计原则角度着重介绍固体表面微结构形貌和尺度对固-液接触的影响。本文还按照实现自输送的表面结构特性以及机理进行分类,阐明自输送表面的输运机理。最后,指出目前自输送表面所存在的问题及可能的解决措施,并对自输送表面的发展方向进行了展望。本文将对设计与制备液体自输送表面提供一定的理论指导。
1 润湿理论及其表面结构特征
1.1 润湿理论模型
深入理解各种不同的固-液接触润湿状态,对于理解液体自输送功能性表面的机理和优化设计液体自输送功能性表面具有重要意义。此外,对不同润湿状态模型深入探索,将对液体自输送功能性表面基础研究和实际应用产生深远的影响。不同于现有文献仅仅对润湿模型进行介绍,本文将介绍不同的固体表面结构下润湿模型所存在的不足,同时,从优化设计液体自输送功能性表面的角度出发,着重介绍微结构对润湿特性,尤其是粘附性的影响,为接下来优化设计低粘附性固体表面提供理论支撑。
1.1.1 Young 氏模型
液体在固体表面的静态润湿特性是气相、液相、固相三相界面相互作用的结果。由于液体在固体表面不会出现绝对的水平铺展,总会存在一种静态稳定状态,因而为了反映液体在固体表面的润湿性,将固-液界面张力和与气-液界面张力(通常称为液体表面张力)之间的夹角作为衡量标准,即静态接触角,用θ表示,如图1a 所示。对于三相中两两作用力,存在如下关系[35]:

其中,γsv、γlv、γsl分别是固-气界面张力(又称作固体表面张力)、气-液界面张力(又称作液体表面张力)、固-液界面张力,这就是著名的Young 氏方程。根据Young 氏方程,研究者将90°作为划分亲液和疏液的边界。然而,真正的边界有待探索。这是由于Young 氏理论将液体看作均一的整体,忽略了液体和固体分子层面的相互作用。以水为例,研究发现[36-37],当水合自由能在小于一定数值(换算为接触角为65°~ 90°)时,传统亲液固体表面分子与水分子仍存在互斥现象,证明此时固体分子已经是疏液的。因而,部分学者将65°作为划分亲水和疏水的边界。同时,由于任何固体表面均具备一定的粗糙度,微观上表现为具有一定几何特征的微突起或者微凹坑,并非绝对光滑的理想平面,而Young 氏方程仅仅反映了在理想的绝对光滑表面上液体的静态润湿特性,不能反映实际上具有微几何结构的固体表面,因而具有一定的局限性。

图1 各种不同的固-液接触润湿理论模型 Fig.1 Various theoretical models of solid-liquid wetting
1.1.2 Wenzel 模型
为了较为准确地描述液体在固体表面的静态润湿特性,学者们提出了表征接触角,用aθ表示,这就是著名的Wenzel 润湿模型[38]。Wenzel 润湿模型认为,固体表面由于粗糙度在微观上表现为无数的微突起和微凹坑,当液滴与固体表面接触时,会全部浸润到固体表面的微凹坑中,并与微突起直接接触,如图1b 所示。对于一个较光滑的平面,其润湿性主要由表面化学成分决定。然而,如果达到极端润湿性(也就是超亲液或者超疏液),仅仅靠化学成分是不够的。例如,在一个具有—CF3的较为光滑的表面上[39],表面接触角最大只能达到119°。但是在设计自输送表面时,往往需要超疏液表面。因而,在设计超疏液表面时,需要考虑到固体表面微结构的影响。此时,应该考虑运用Wenzel 模型。Wenzel 模型中,表征接触角aθ与Young 氏理论的静态接触角θ存在如下关系:

其中,r是粗糙度系数,是实际固-液接触面积与理论固-液接触面积(即Young 氏方程中所认为的固-液接触面积)之比。显然,粗糙度系数r>1。在该理论基础上,可以得出,表面微结构可以起到放大润湿效果的作用,即对于亲液表面,增加表面的粗糙度会使得表面更加亲液;反之,对于疏液表面,增加表面粗糙度会使得表面更加疏液。
Wenzel 模型对于解释一些高粘附性表面具有重要意义,正是由于液体浸入到微结构中,导致固-液接触面积增大,从而使得表面有较大的粘附性。典型的处于Wenzel 状态的表面有玫瑰花瓣[40],其表面粘附性极强,处于其表面的液滴很难从其表面脱落。Wenzel 模型也存在着缺点,即Wenzel 模型将固体表面形貌认为是均一的,然而实际上大多数固体表面的形貌,即波峰和波谷是完全随机的,因而此时Wenzel模型不再适用。在设计液体自输送表面,尤其是超疏液表面,应该降低表面的粘附性,从而减少液体输送过程的阻力。而处于Wenzel 状态下的固-液之间有着极大的粘附性,因而设计过程中应予以避免Wenzel态的出现。
1.1.3 Cassie-Baxter 模型
Cassie-Baxter 模型改进了Wenzel 模型,其学说认为液体并非完全浸入到固体表面的微凹坑内部,而是在微凹坑与液体底部之间形成了一个“空气垫”,这个空气垫产生一个向上的压力,使得液体底部不浸入微凹坑内部,如图1c 所示。典型的表面有荷叶,液滴在其上表现出极小的滚动角和滞后角。Cassie- Baxter 模型的公式如下[41]:

1.1.4 Cassie-Baxter 浸润模型
Cassie-Baxter 浸润模型是一种介于Wenzel 状态和Cassie-Baxter 状态之间的一种润湿模型。当固-液接触状态处于此状态时,在液滴的底部,一部分有“空气垫”的阻隔,类似Cassie-Baxter 态;一部分液体浸润到微结构内部,类似Wenzel 状态,如图1d 所示。E. Kavousanakis Michail 等[43]首先通过有限元和特殊参数延拓技术的方法发现,当表征接触角和接触角满足一定条件时,如图2 所示,Wenzel 状态和Cassie- Baxter 状态可以共存,通过仿真得出了Cassie-Baxter、Wenzel、Cassie-Baxter 浸润三种润湿状态之间相互转化的能量壁垒,并首次发现了Cassie-Baxter 浸润态稳定的表面。材料在这种状态下,表现出的粘附性较Wenzel 状态小,较Cassie-Baxter 大。因而,在设计液体自输送功能表面时,应该尽量避免出现这种状态。
1.1.5 Hemiwicking 模型
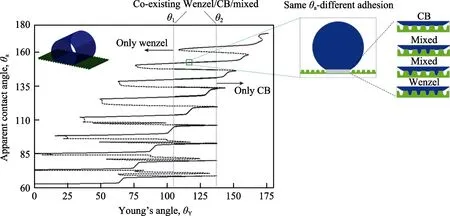
图2 固-液接触处于Wenzel 浸润态时Young 氏接触角θY 与表征接触角θa 的关系[43] Fig.2 Relationship between Young contact angle θY and apparent contact angle θa when the wetting state is Wenzel state[43]
在液体自输送过程中,液体的前端应该易于铺展,即前进角应该尽量小。此时,若在液体前端的微结构之间填充一部分液体,会大大减小固-液接触面积,从而减小液体的前进角,使得液体易于铺展。近年来,随着研究的深入,由José Bico 在2002 年提出了一种新的润湿模型——Hemiwicking 润湿模型[44]。该 模型类似于Wenzel 模型,区别在于在液滴周围会铺展一个液膜,如图1e 所示。CHEN Hua-dong 等人[45]通过数学计算的方法找到了Hemiwicking 发生的条件,指出其本质是一种毛细现象,与表面微结构的长度、形状等均有关。LAI Chang-quan 等人[46]研究了液滴在表面发生Hemiwicking 时的动力学,发现这种扩散遵循一定的能量规律,并通过减小自由能的变化得到Hemiwicking 激发的机制。通过数学计算得到了相应的Hemiwicking 水膜稳定高度,并且发现当微结构有较小的间距、较大的顶端半径、较大的高度以及较小的本征接触角时,液滴在此基底上更容易产生Hemiwicking 现象,最终发现其计算结果和实验具有较好的一致性。
在设计自输送表面时,若让液体倾向于在固体表面,尤其是亲液区域铺展,从而使得整体液滴向期望的方向前进,Hemiwicking 态是理想的选择。处于此润湿状态的表面液体前端极易形成水膜,从而可以使得固体表面较低的微结构被覆盖,暴露出的较高微结构间距必然比存在较低微结构时的大,因而可以形成更大的表面粒子直径,即微结构之间的间距[10]。根据Washburn 模型可知[90](描述固体表面毛细流动的数学模型,后文将会详细谈到),液体的毛细流动受到表面粒子直径的影响。当表面粒子的直径增大,其速度增加,输运距离增加;反之,其速度减小,输运距离减小。因而,液滴处于Hemiwicking 态,由于液膜的存在,有利于主体液滴的流动,从而增加输送效率。
1.1.6 Furmidge 模型
上述四种润湿模式属于静态润湿模式,是理解各种润湿表面的基础。对于一些动态的润湿特性(比如用来衡量液滴在表面上滚动难易程度的滚动角)主要用来评估液体在表面上的动态滑移等,主要用于自清洁领域和水的收集、输运等。动态特性主要是在倾斜的平面上测得的,如图1f 所示。其计算公式为[47]:

式中:m是液滴的质量,g是当地重力加速度,σ是表面张力,w是液滴与表面接触处的圆的直径,rθ和aθ分别是前进角和后退角。
以上六种固-液接触形态是理解固体表面特性的基础。对于设计优化自输送表面而言,当液体在亲液区域被运输时,液体应该倾向于Hemiwicking 状态;在疏液区域,液体与固体间的粘附性应该尽量小,因而此时Cassie-Baxter 状态最佳。
1.2 固体表面微结构形貌和尺度对液体粘附性的影响
在液体自输送表面,液体的流动是在驱动力和阻力的相互作用下完成的,而阻力大多来源于固-液接触。当阻力过大时,驱动力不足以克服阻力,将导致自输送失败,此时固体表面的粘附性至关重要。如 1.1 节所述,为了成功实现在固体表面上的液体输运,固体的表面设计需要满足较低的粘附性条件,即较小的滞后角和滚动角,此时固-液表面应尽可能处于Cassie-Baxter 模式。但是,当处于此模式时,不同的表面形貌特征、不同的尺度会对分子间相互作用、固液接触方式和毛细管效应等产生影响,进而对表面的粘附性产生较大的影响。因而,在设计输运液体表面时,表面微结构形貌、尺度和间距就显得尤为重要,本节将重点介绍不同微结构形貌和尺度对固体表面粘附性的影响。然而,需要指出的是,决定表面粘附性的不仅有表面微观结构,还有表面化学成分[40]。本节所讨论的所有微观结构表面,均建立在此时的固体表面的表面能已经是低表面能基础之上。
表面微结构形貌影响粘附性,体现在微纳结构的形貌影响固-液接触方式和固-液接触线的形态。在固-液接触方式方面,主要影响固-液接触面积,从而呈现出不同的粘附性[48]。固-液接触方式主要有面接触、线接触、点接触。显然,这三种接触方式的接触面积呈递减趋势,使得这三种接触方式所呈现出的粘附力也呈现出相同的递减趋势。LAI Yue-kun 等人[49]通过改变固体表面纳米结构的形貌,依次得到纳米孔阵列结构、纳米管阵列结构、纳米绒毛结构,如图3a 所示。实验发现,这三种结构的表面固-液接触方式分别依次为面接触、线接触、点接触,且粘附力依次降低。这三种结构中,产生粘附性的主导作用力发生了变化。对于纳米孔阵列结构、纳米管阵列结构,产生粘附力的主导作用力是毛细力,即液滴移动时纳米孔和纳米管引发的毛细管效应,产生了向下的压强,该压强使得液体不易在固体表面移动,如图3d 所示。对于纳米绒毛结构而言,其主导作用力是范德华力,且是点接触,接触数量小,因而粘附性较小。TIAN Jian 等人[50]通过化学沉积的方法在玻璃表面沉积ZnO 纳米晶体,通过控制反应温度可以得到不同形貌的ZnO 晶体,随着温度的降低,晶体形貌也由圆柱状过渡到铅笔头状再过渡到针状,如图3b、3c 所示,且这三种形貌的粘附性递减。主要原因是随着形貌的改变,微结构顶部面积减小,固液接触方式由面接触变为线接触再到点接触,从而使得粘附性依次降低。类似的研究,ZHU Tang 等人[51]通过将等规聚丙烯(i-PP)和无规聚丙烯(a-PP)混合并改变两者的含量比值,得到不同粘附性的表面。随着无规聚丙烯含量的增加,表面微结构的形貌发生改变,使得固-液接触面积逐渐增加,表面润湿状态由Cassie-Baxter向Cassie-Baxter 浸润态过渡,从而使粘附性增大。

图3 表面纳米结构形貌及其对粘附性的影响[49] Fig.3 (a) Three types of nanostructures array. From top to bottom, the surface structures are nano-pore array structure, nano-tube array structure, and nano-villi structure, corresponding to three solid-liquid contact states, that is, surface contact, line contact and point contact[49]; (b) Three types of ZnO nanocrystalline array: nanorods, nanopencils, and nanoneedles; (c) Variation of adhesion forces with ZnO diameters under different temperatures. With the decrease of temperature, ZnO nanocrystals shape shift from nanorods to nanoneedles, and their adhesion decreases[50]; (d) When the liquid on the nano-pore and nano-tube array moves, the dominant force affecting the adhesion of liquids is capillary force[49]
如上文所述,表面微结构形貌影响粘附性,不仅体现在影响固-液接触方式,还体现在表面形貌影响固-液接触线的形态。对于大多数固体表面,当液滴滴加在其表面上时,液体会在一个局部能量最小值处停下来。此时的接触线将被固定在一个亚稳态,表面上水滴的任何前进或后退都会有一个能量障碍。两者 动态能量壁垒的差异使得前进角和后退角也会有所差异,从而导致接触角滞后,进而导致粘附力的产生。ZHAO Xiao-dan 等人[53]通过改变表面微结构的尺寸和形貌,得到四种不同微结构的表面,分别为大的网格状(L-MLS)、小的网格状(S-MLS)、仙人球状(BCS)和纳米棒结构(TNS),如图4a 所示。实验发现,其粘附力依次降低,且粘附力范围为0~150 μN,如图4b 所示。固-液接触线从连续变为断续,因此粘附力逐渐降低。与此同时,大量的研究也得出了同样的结论[54-55],即三相线处的接触方式可以有效地改变固体表面的粘附性。
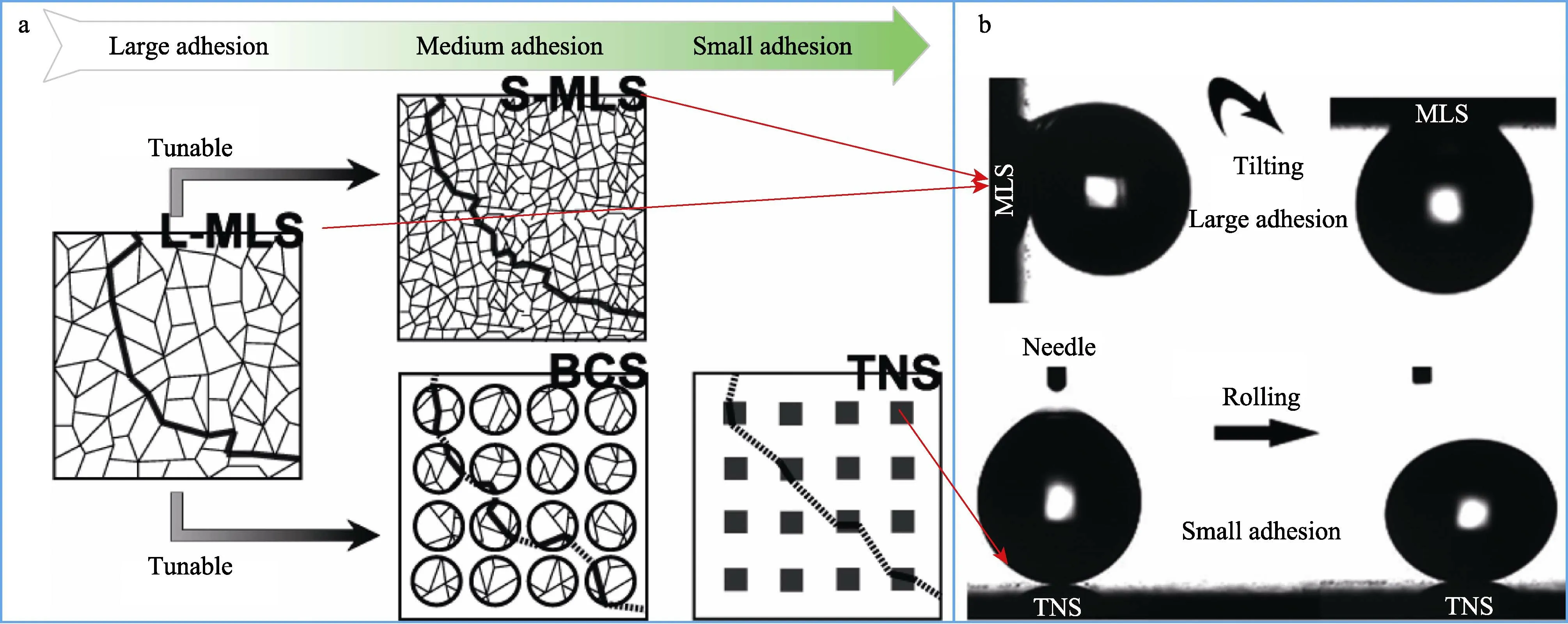
图4 大的网格状(L-MLS)、小的网格状(S-MLS)、仙人球状(BCS)和纳米棒结构(TNS)等微结构表面及其对应的粘附性[53] Fig.4 Four types of surfaces with different microstructures and their adhesion properties: L-MLS, S-MLS, BCS, and TNS [53]
上文主要分析了固体表面微观结构形貌对固-液接触状态的影响。固体表面微观结构尺度也会影响固-液接触状态,从而使得粘附性发生变化。众多研究表明[54-56],相比于仅仅具有微米级别突触的固体表面,在微米级别突触的表面增加一层纳米级别的结构, 可以进一步减小固-液接触面积,从而使得表面的粘附性更低。例如,水滴在荷叶上能够轻松滚落下来,如图5a 所示。这是由于其表面有着较小的滚动角,液滴可以轻松从表面滑落。通过对荷叶的表面形貌进行观察发现[56],荷叶表面上有着微突起结构,微突起的形状呈乳突状,如图5b 所示。其大小为5~10 μm,高度约为18 μm,顶峰间距为12 μm,密度为4.2× 105cm-2。同时,在微米级的乳突状微结构上附着有直径约为100 nm 的纳米级的管状结构,这种管状结构粗糙处有一层蜡层,属于长链碳氢化合物,呈疏水性,如图5c 所示。微米级的突起和附着在其上的纳米级的管状结构共同构成分级结构。不仅局限于荷叶表面,根据现有文献报道,众多的超疏水性和自洁表面都包含一个微纳米分级结构[57-60],如水黾的足[59]、蚊的复眼[60]。在荷叶上纳米结构呈现出管状,在其他超疏水固体表面,该纳米结构呈现出血小板或其他形态[61-63]。当水滴与这些表面接触时,水滴很容易位于纳米结构的顶端并与其接触,固-液接触状态呈现出Cassie-Baxter 态,呈现出极小的固-液接触面积。微突起的存在,使得微结构和水滴之间形成了一个“空气垫”,从而大大降低了水滴和固体表面的接触面积,同时微突起的存在也使得荷叶表面与水滴的纳米结构接触减小[59]。位于微突起表面的纳米结构的存在,使得固-液接触进一步减小,同时可以起到在外力作用下维持Cassie-Baxter 润湿态的稳定性[63],从而使得表面呈现出低粘附性特点的作用。位于其上的水滴极易滚落,实验发现,荷叶表面的滚动角大约为4°[55,64]。
除了固体表面微结构尺度会影响到固-液接触状态,微结构间距也会对粘附性产生较大的影响。以壁虎为例,壁虎能够在墙上爬动,是因为其趾的表面有着较强的粘附性[69],如图5d、e 所示。同时,其趾也是疏水的,但是却对水表现出较高的粘附性。实验表明,当液滴滴加在其表面且表面倾斜180°时,液滴也不会滚落,证明其具有极大的滚动角。对其趾研究发现,其表面由众多的刚毛构成,长度为20~70 μm,直径大约为3~7 μm,如图5f、g 所示。刚毛又继续分为众多的纳米级别的铲状匙突,如图5h 所示,直径在100~200 nm 之间,间距在0~50 nm 之间。纳米级别的铲状匙突会引发大量的纳米结构接触,从而和水分子之间产生累积分子间作用力,即范德华力。由于铲状匙突密度极高(间距较小),从而使得表面呈现出超高的粘附力[48,65]。研究人员发现,当减小壁虎趾表面纳米结构 10%的间距时,其粘附性会减小40%[66]。但是,值得指出的是,使得范德华力产生不仅需要控制纳米结构的间距,还需要控制纳米结构的形貌、尺寸(长径比、高度等)、表面能和机械灵活性等[65-69]。因而,并非仅仅通过控制间距便可产生诸如壁虎趾表面高粘附的特性。若增大纳米结构的间距,当纳米结构的间距超过一定尺度(~100 nm)时,纳米结构之间的“空气垫”会被液体取代,从而引发润湿模式从Cassie-Baxter 润湿态向Wenzel 润湿态转变,引发粘附性的变化[59]。而对于微米级别的结构而言,微结构的间距也会对表面的粘附性产生影响。QIN Zhong-li 等人[52]在聚四氟乙烯表面通过皮秒激光加工方法,通过改变激光扫描的间距得到不同间距的微结构,水滴在其上展现了疏水特性,且随着扫描间距的增大,粘附性逐渐增加。该作者认为,这是由于随着扫描间距的增加,表面微观结构的间距也增大,水在其表面的润湿状态由Cassie-Baxter 状态逐渐过渡到Cassie-Baxter 浸润态再过渡到Wenzel 状态, 从而出现了粘附性递增的趋势。
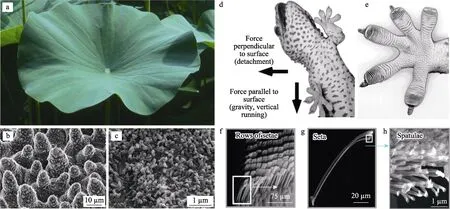
图5 荷叶[68]和壁虎的趾[69]表面形貌 Fig.5 Surface morphology of lotus lea[68] and gecko’s toe[69]
上述荷叶表面和壁虎的趾表面虽然均处于Cassie- Baxter 润湿状态下,且均展现出超疏水的特性,却展现出截然不同的粘附特性,主要原因是壁虎表面纳米结构接触导致的范德华力,使得其表面宏观上表现出高粘附性的特点[48]。如上文所述,壁虎的趾表面存在大量特殊形貌的纳米结构(直径100~200 nm),使其与水分子产生大量分子水平上的纳米结构接触,引发了范德华力,加上纳米结构间距较小,密度较高,众多的范德华力累积使得表面呈现出超高的粘附性[65]。而荷叶表面属于微米级别乳突和纳米级别管状结构分层结构,微突起的存在使得固体表面和液滴之间产生一层“空气垫”,从而使得荷叶表面与水分子的纳米结构接触较壁虎趾更少,进而导致表面粘附较小[55,64]。
综上所述,固体表面微结构形貌、尺度和间距主要影响液体在其上的润湿状态和固-液接触状态。在设计液体自输送表面时,要避免出现Wenzel 状态,此时固体表面粘附性较大,如图6a 所示。同时,也要注意控制纳米结构的形貌、尺寸、间距等,避免出现范德华力主导而产生的高粘附特性,如图6b 所示,此时不利于液体的输运。应尽量减少固-液接触面积,使表面处于Cassie-Baxter 状态,以期获得较小的表面粘附性,如图6c 所示。

图6 不同生物表面润湿状态粘附性与所处的润湿状态[69] Fig.6 Wetting states of various nature creatures and their corresponding adhesion properties[69]
2 功能性表面液体自输送模式及其机理
2.1 非均质润湿模式及其液体自驱动机理
上文主要介绍了固-液接触模型、不同的固体表面形貌、尺寸和微结构间距如何影响粘附性,以及设计低粘附性表面时的设计原则。下文将主要介绍各种液体自输送表面及其机理。本文将自输送表面分为两大模式,第一种为非均质润湿模式,第二种是均质润湿模式。非均质润湿模式实现液体输送依靠的是表面微观结构或者润湿性的不均匀导致不均衡的表面张力,其沿着输运方向的分力作为驱动液体的驱动力。液体最终在此分力的作用下,克服固-液接触或者液-液接触产生的阻力,实现液体的自输送。非均质润湿模式的表面主要有梯度润湿表面、锥体表面、润湿图案化表面、薄壁多孔材料。
2.1.1 梯度润湿表面
1992 年,哈佛大学的Manoj K. Chaudhury 和Gorge M Whitesides 等[70]发现当固体表面存在润湿性梯度时,液体在其上的接触角也呈梯度变化特性,梯度特性的接触角使液体在其表面上受到不同的表面张力水平分力,并形成不平衡的Young 氏力,当此力大于接触角滞后阻力和液体粘性阻力时,液体会被从较为疏液的一端运输至较为亲液的一端,即接触角较小的方向。Gorge M. Whitesides[70]利用溶解于液体石蜡溶液中的癸基三氯硅烷在空气中挥发按距离远近形成不同浓度的原理,将离溶液液面2 mm 处竖直放置的硅片表面不同位置沉积不同浓度癸基三氯硅烷,进而获得接触角变化的润湿性梯度表面。实 验发现,水滴在15°倾斜表面的抗重力运输速度可达到1~2 mm/s。LIU Chao-ran 等人[71]通过光刻结合氧化技术,在硅片上制备了带有梯度接触角的表面。通过改变图案的密度,可以使其接触角从15.5°增加到166°,如图7a、b 所示。通过引入一个无因次参数τ来表示液滴半径与某一特定接触角条纹的长度之比,并对液滴在制备表面上的运动行为进行了实验研究。实验结果表明,当τ较小时,液滴运动时间较长、速度较快,在τ为0.83 和2.5 的条件下,液滴位移分别为5.2 mm 和3.2 mm,平均速度为75 mm/s 和46 mm/s。Deepu J. Babu 等人[72]利用直流电晕放电的方法实现了对超疏水碳纳米管的润湿性调控,获得了接触角从0°至162°变化的润湿性梯度表面。实验发现,水滴在水平表面的运输速度可达到50 mm/s,在倾斜17°表面的抗重力运输速度可达到20 mm/s。Sandra C. Hernandez 等[73]通过电子束诱导等离子体处理石墨烯表面,使表面不同位置具有不同的O 含量或F 含量,进而获得了接触角从0°至100°变化的润湿性梯度表面,水滴在水平表面的运输速度为27.8~39.4 μm/s。
上述的梯度润湿表面属于断续改变接触角,即在某一区域其接触角一定,接触角的梯度是在交界处实 现的,而非连续的。对于实现接触角连续变化的表面主要运用了疏液表面的Cassie-Baxter 模型。在1.1.3节提到的Cassie-Baxter 润湿模型中,通过改变固-液接触面积分数和气-液接触面积分数,可以改变固体表面的接触角,从而实现梯度润湿。LI Juan 等人[74]通过在硅片上制造如图7d 所示的中心辐射的特殊微结构沟槽,通过改变微织构之间的角度来改变固-液接触面积,从而实现对接触角的调控,进而实现连续的润湿梯度。结果表明,该方法可以实现液体的无损运输,且能够调控液体输送方向,实现油的双向运输。
梯度润湿表面虽然能够实现液体的无损输运,但是由于由梯度润滑润湿所产生的润湿梯度不足,会导致驱动力不足。由于润湿梯度有限,且润湿梯度产生的驱动力较小,驱动距离极大受限。同时,对于大流量的液体,该方法将不再适用,因此梯度润湿表面具有一定的局限性。
2.1.2 锥体表面
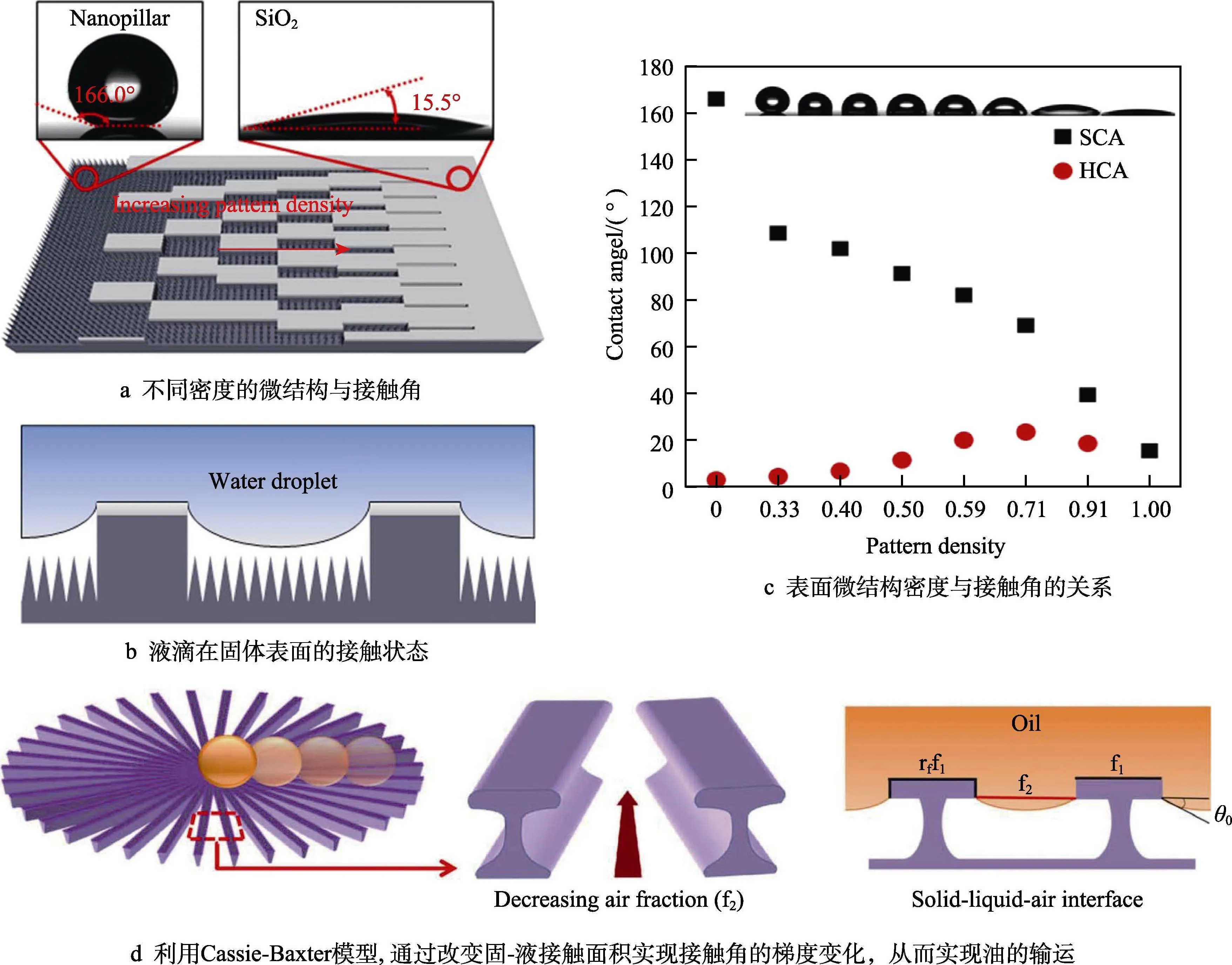
图7 梯度润湿表面设计及其润湿特性[71,74] Fig.7 Design of wetting gradient surface and their wetting properties: (a) various microstructures density and their contact angles; (b) wetting state on solid surface of an oil droplet[71]; (d) oil transport achieved gradient change of contact angle through changing the solid-liquid contact area in Cassie-Baxter wetting model[74]
锥体表面液滴的输运主要是利用锥体由窄端向宽端过渡时位于其上的液滴会产生半径梯度,使得液滴沿三相接触线处产生不平衡的拉普拉斯压差,由该压差梯度产生不平衡的毛细力,实现液体的输运。由拉普拉斯压差计算公式 2 /PrγΔ = 可知(其中γ代表 表面张力,对于同一种液体其值固定,r代表液滴的半径),液滴前后端拉普拉斯压差不同,从而会有一个推动液滴前进的合力,使得液滴从半径较小的一端移动到较大的一端。法国国家科学研究院的E. Lorenceau等[75]首次发现,当液体处于亲水圆锥体形状外表面时,会从锥尖方向向锥横截面半径变大的方向自发运输,其原因是液体在锥体外表面各处液面曲率不均匀,导致液体表面产生拉普拉斯压强梯度,作者还建立了圆锥体轴线方向不同位置的拉普拉斯压强梯度数学模型。E. Lorenceau 还通过加热拉伸的方法加工亲水锥体毛细玻璃管,水滴在其上会自发地向远离锥尖的方向运输,运输速度约为几个毫米每秒。Ju 等人[76]采用电化学刻蚀技术,通过控制直径350 μm 铜棒不同部位在硫酸铜溶液中的腐蚀时间,加工出具有一定锥角的圆锥体铜针,水滴在锥角为12°的铜针表面的运输速度为10.31~26.03 μm/s。ZHENG Yong- mei等[10]发现蜘蛛丝在潮湿空气中依靠蜘蛛丝形成的纺锤体表面,同时捕获雾气小水滴并运输至节点处形成水珠,因而解释了常见的蜘蛛丝清晨挂水珠现象。如图8a、b 所示,在蜘蛛丝的表面上有着众多的锥体纺锤体,与其接触的液滴在纺锤体的窄端和宽端半径会产生差异,从而形成不均衡的拉普拉斯压差。同时沿着变宽的方向上会存在表面能的递增,液滴在此差异的作用下形成沿着从窄端到宽端的驱动力。类似地,仙人掌的锥体针刺[9]也是依靠液滴前后端不等的半径产生的不平等的拉普拉斯压差实现液滴的定向输送,如图8c—f。
综上,锥体表面进行水的运输主要是依靠液滴在其表面上不平衡的拉普拉斯压差实现的,在锥体较窄的一侧,液滴的半径较小,因而会导致较大的拉普拉斯压差;在较宽的一侧,由于半径较大,因而拉普拉斯压差较小。在窄端和宽端形成的拉普拉斯压差梯度最终会产生不平衡力,最终液滴实现从窄端到宽端的移动。这种方式的液体输送受到锥体形状的制约,若想实现远距离的输运,会导致末端的锥体较大,不利于液体的输送。
2.1.3 润湿图案化表面
前文所述的蜘蛛丝、仙人掌的针刺,均是锥体,可以利用锥体形状产生的拉普拉斯压差实现对水的输运。除了利用锥体形状引起的拉普拉斯压差,还有一种利用润湿差异实现的拉普拉斯压差,该表面叫作润湿图案化表面[77-78]。润湿图案化表面是利用液体在平面上由于润湿差异性导致变形,形成沿着输运方向的半径差,进而产生具有梯度的拉普拉斯压差实现液体的自输送,如图9a、b 所示。弯曲的液滴在表层分子的作用下,会产生指向弯曲方向的拉普拉斯压差,在该压差作用下,液滴可以保持其弯曲的形状。润湿图案化表面正是利用超亲液的楔形区域和超疏液的外围区域,液滴在润湿边界的作用下,引起拉普拉斯压差梯度,进而推动液体的前进。近年来,制备润湿 图案化表面的方式常见的有喷涂法[10]、激光加工法[79]、等离子溅射[80]、掩模辅助化学蚀刻法[81]、电化学刻蚀[82]、光刻法[83]等。然后,尽管制备方法多种多样,其本质均为首先制备超疏液表面,然后在此基础上进行选择性加工,制备出所需要的超亲液表面。如喷涂法中采用的是光敏性粒子,在喷涂上一层光敏性二氧化钛粒子得到超疏液表面后,用紫外线进行选择性照射,制备出所需要的超疏液楔形区域。电化学刻蚀法是首先制备出所需要的疏液层,然后通过电化学刻蚀选择性去除楔形区域,得到所需要的超亲液楔形槽。这种方式的优点是可以实现较远距离、大容量液体的输送,且输送速度较高。但是液体会在整个亲液区域铺展,并且当液滴运输完成后,会有一部分液体留在超亲液区域,造成不必要的液体浪费。
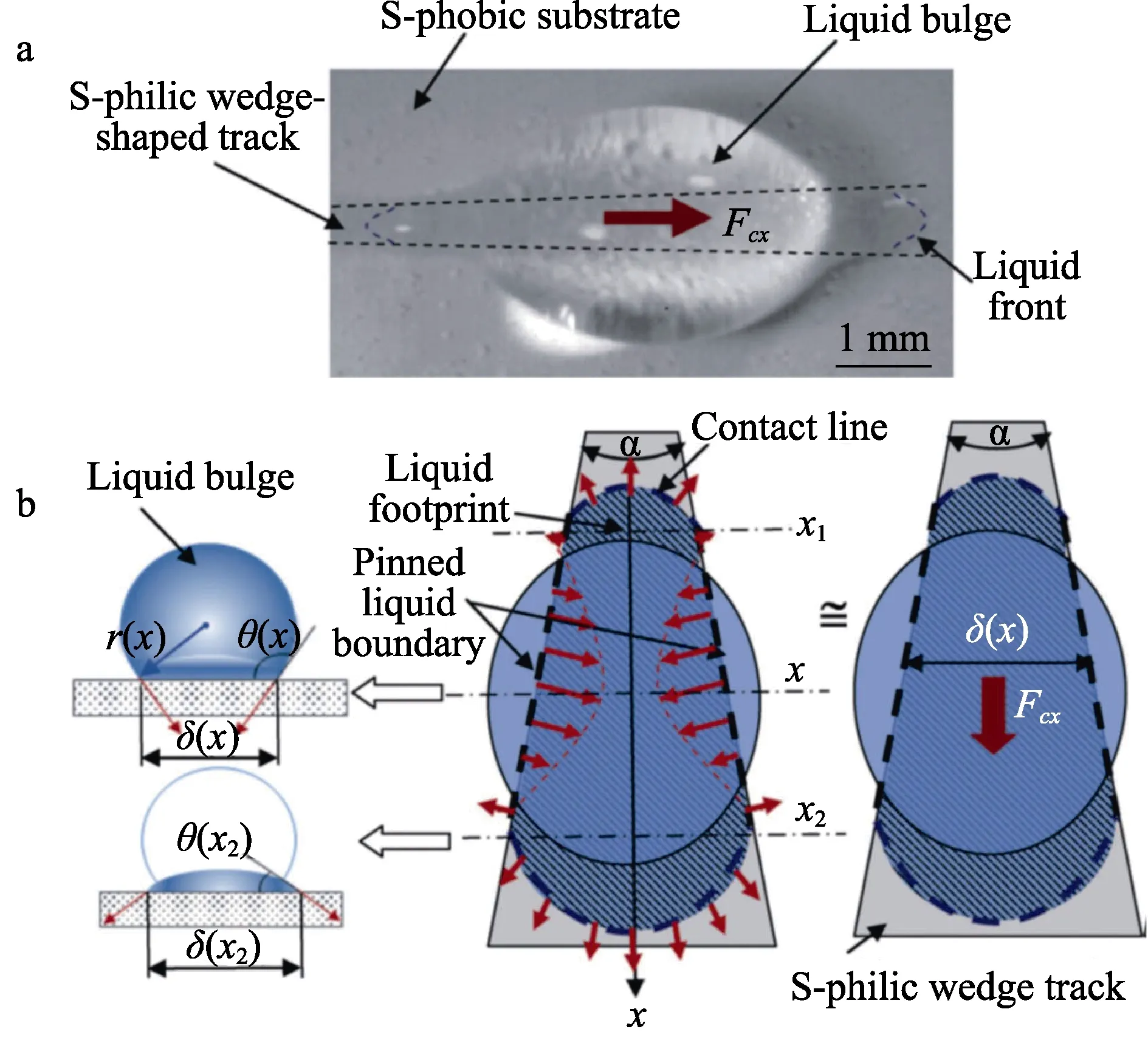
图9 通过光敏粒子催化实现的超疏水/超亲水楔形图案化表面及其输送机理[77] Fig.9 Superhydrophobic and superhydrophilic wedge shape patterned surface achieved by photosensitive particle catalyzing and its transport mechanism[77]
美国伊利诺伊大学芝加哥分校的Ghosh Aritra 等[77]研究认为,只有当液体直径大于超亲水楔形区域宽度时,液体才会发生整体运输,即液体要与润湿边界接触且主要驱动力是来自于液体前后端的不同拉普拉斯压强,并推算出了液体不同位置处的拉普拉斯压强梯度。作者先通过常温喷涂含氟丙烯酸酯共聚物-二氧化钛-乙醇混合物的方法,在固体表面获得超疏水二氧化钛涂层,再利用二氧化钛因光催化效果经紫外光照射会从超疏水性转变为超亲水性的特点,通过胶片掩膜板紫外光照的方法加工超亲水楔形区域,由此实现超疏水/超亲水楔形图案化表面的构建,水滴在其上的运输速度达375 mm/s,运输流量达350 μL/s。ZHANG Ji-chao 等[30]还通过结合盐酸刻蚀、沸水浸泡和氟硅烷修饰(氟化)的方法加工超疏水铝表面,并利用激光刻蚀加工超亲水区域,由此实现了铝基体超疏水/超亲水楔形图案化表面的构建,并成功应用于水汽的收集。Mizuno Akira 等人[84]通过等离子体刻蚀,在疏液的基体上制备出超亲水楔形图案,该方法可以实现液体的自输送。该作者还成功建立了液体输送距离的数学模型,并与实际取得了良好的一致性,其运输速度可以达到200 mm/s。Hwa Seng Khoo 等[85]先将载玻片浸泡在甲基三氯硅烷的甲苯溶液中,制备接触角为168°的超疏水网状纳米纤维结构,再结合掩膜氧等离子体改性技术,在此表面获得接触角为0°的超亲水楔形区域,由此加工出超疏水/超亲水楔形图案化表面,水滴在其上的运输速度达450 mm/s。
2.1.4 薄壁多孔材料
薄壁多孔材料实现液体的自输送主要是在厚度方向上实现的,大体可分为三种模式,第一种模式是在单一多孔材料厚度方向上构建润湿梯度。WANG Hong-xia 等人[87]报道了在梯度润湿的织物上实现水定向输运:通过在织物厚度方向上形成从超疏水性到亲水性的润湿性梯度,当水滴在超疏水性的一面时,它会迅速穿过织物并在亲水性的地方扩散。然而,除非施加额外的压力来帮助渗透,水不能以相反的方式通过织物转移。梯度润湿的多孔材料由于是在一块材料上制备的,因而具有较好的完整性。但是由于其制备工艺复杂,梯度要求较高,并且由梯度产生的毛细力较小,因而一直制约此类材料的应用。
除了在织物厚度上形成润湿性梯度外,疏水性和亲水性之间骤然变化的润湿性也表现出定向输水效应,也就是本文要提及到的第二种薄壁多孔材料液体输运模式,靠两层密切接触但润湿性相反的多孔材料实现的,称为双面润湿性模式。这种模式的特点是疏液层的厚度对输运特点起着重要的作用,而亲液层的厚度对输送效果影响不大。当亲液层的厚度很小时,液体可以从材料的两侧浸润通过;然而当疏液层的厚度很高时,液体在材料的两侧均不可通过。厚度的范围主要取决于多孔材料孔的性质和表面的润湿性。ZHOU Hua 等人[88]通过湿化学涂层和连续紫外线照射处理相结合的方法,制备出能够实现定向输送的织物材料。当下层表面(即紫外线照射织物未暴露的一面)具有疏水性时,水被吸引并扩散到上层亲水性表面(即紫外线暴露的一面),如图10a 所示。反之,当水与下层亲水表面接触时,观察到水仅在下层表面扩散,而在上层疏水面没有水的输送和扩散,如图10a、b 所示。证明了这种定向液体输送是一个与重力无关的、仅受表面特性驱动的自动过程。该类材料制备简单,但由于是双层材料制得,因而材料容易分离,在使用过程中会因为分离影响其实际应用。
上述两种在薄壁多孔材料上及厚度上实现水的定向输送主要依靠润湿性的改变完成的。而第三种输送模式可以在不依靠润湿性改变来完成,即依靠均匀的超疏水网和上层的水膜/柱来实现水的定向输送[89],如图11a 所示。其在输送过程中的特点是在超疏水网的另一侧需要有一层水膜,当小水滴接触到网孔的下表面时,小水滴会主动穿过网孔,融入到上层水膜中,如图11b 所示。这种吸水模式的特点是水滴和网面之间的接触线保持固定。其原理是利用了水柱内部与液滴内部不均衡的拉普拉斯压差,使得压差较大的液滴能够浸入到压差较小的水柱中去,随着水滴的不断进入(如图11c 所示),上层水柱高度增加(如图11d所示)。水层能达到的最大高度取决于网格的疏水性和孔径:小的孔隙(<200 μm)使得水滴很难穿透网格,而大的孔隙(≈1 mm)使得最大收集水柱高度很低(< 10 mm)。当孔洞尺寸为500 μm 时,水接触角为150°和137.5°的铜网所能收集的最大水柱高度分别为13.6 mm 和10.3 mm。这类材料对液体的收集 效率较高,但其收集受到超疏水网格大小、润湿性以及收集的水柱高度的综合影响,优化较为复杂。

图10 双面润湿性模式下液滴的输送[88] Fig.10 Droplet transport on Janus wettability model[88]
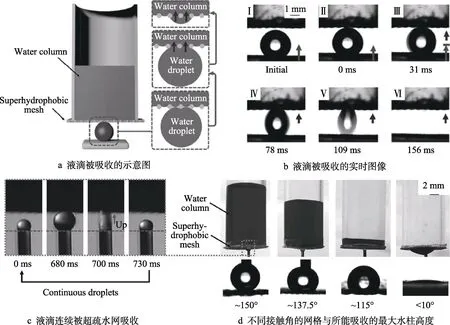
图11 超疏水网实现水的定向输送[89] Fig.11 Superhydrophobic mesh to realize directional water transport: (a) schematics of the liquid transport; (b) situ observation of directional liquid transport; (c) continuous directional water transport on superhydrophobic mesh; (d) the maximum height of water column under various contact angles[89]
2.2 均质化润湿模式及其液体自驱动机理
均质润湿模式固体表面的微观结构或者润湿性是均匀的。此类运输模式下,液体的流动大多是依靠毛细力或者两液滴之间的拉普拉斯压差完成的,其主要包含毛细力驱动微沟槽表面、拉普拉斯压差驱动表面、毛细力驱动滑移表面。
2.2.1 毛细力驱动微沟槽表面
综上所述,构建所需要的依靠毛细力实现的液体自输送表面,要在固体表面形成众多的微毛细管,就需要在固体表面首先构建所需要的微结构;此外,该微结构还要有亲水的特性。满足以上两点,即可实现细力驱动微沟槽表面。
2.2.2 拉普拉斯压差驱动表面
区别于上述非均质润湿模式中的润湿图案化表面,其主要是利用单个液滴在前后端半径差产生的拉普拉斯压差梯度,在三相线处产生的沿液体输运方向的分力实现液体输运。均质润湿模式中拉普拉斯压差驱动表面,主要利用两个液滴内部拉普拉斯压差不同而实现液体的输运。XING Si-yuan 等人[86]发现当液滴的直径接近或小于毛细长度时,固体表面液滴内部的拉普拉斯压差主要受到液滴的半径、高度、固-液接触半径以及液滴体积的影响,如图13a 所示。作者通过在疏液基底上用激光加工出亲液微环槽,微环槽由于呈亲液状态,在边缘效应的作用下液体仍然以液滴的形式存在,最终成功控制液滴在疏液表面的接触半径,从而可以通过数学计算预测出液滴内外的拉普拉斯压差,如图13c 所示。在此基础上,通过在两液 滴之间构建一个亲液沟槽,并控制液滴与表面的接触半径,从而可以控制沟槽内液体的流向,实现液滴的定向运输,如图13b 所示。值得注意的是,通过控制液滴的体积与固-液接触半径,该方法不仅可以实现液体的单向输运,还能实现液体的双向输运。但由于其运输速度低,需要在沟槽两端加入指定体积的液体和对沟槽提前润湿,且不能输送大体积的液滴,因此该方法具有一定的局限性。
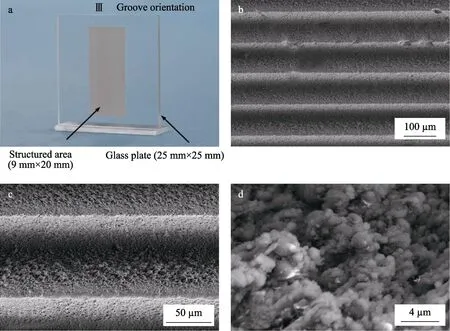
图12 通过激光加工在玻璃上形成的微沟槽形貌[94] Fig.12 Surface morphology of microgrooves on glass by laser machining[94]

图13 通过控制液滴在超疏水表面的直径、高度、体积实现精确控制拉普拉斯压差[86] Fig.13 Precision control of Laplace differential pressure of a droplet by controlling the diameter, height, and volume of a droplet[86]
2.2.3 毛细力驱动滑移表面
另一种依靠毛细力驱动的滑移表面是瓶子草鳃盖上的毛状体表面,其滑移界面和运输的液体均是单一的水,且其毛细力来源于表面的分级微沟槽,这些微沟槽的存在激发了滑移界面的同时,也产生了毛细力。与上述依靠半月板状的弯液面相比,其优点在于这种模式下的驱动力不受毛细长度的限制[97]。SEM 电镜下观察到瓶子草表面有许多高低不平的肋条,相邻两肋条之间构成一个沟槽。外围较高的肋条与相邻的较低的肋条构成边缘沟槽(图4l 中两相邻的灰色肋条和蓝色肋条之间),两相邻的较低的肋条构成中间微沟槽(图4l 中两相邻的较矮的蓝色肋条之间),两相邻的较高的肋条构成外围沟槽(图4l 中两相邻的较高的灰色肋条之间)。水分依次填充满边缘微沟槽和中间微沟槽后,便可以形成一个稳定的滑移界面,而后液滴在外围沟槽中的滑移界面上输运,可以有效减少固液接触面积,减少黏性力,进而可以大大提高水分的输送效率。
2.2.4 拉普拉斯压差驱动滑移表面
拉普拉斯压差驱动的滑移表面,本质上属于润湿图案化表面和滑移界面的结合[29,98]。该模式也是由两种液体组成,即底部的非极性液体和上部需要输运的极性液体。该方法基底表面是由双疏(疏水和疏油)背景和亲油疏水的楔形区域组成,在滴加上油(如硅油)后,油会在亲油区域铺展,形成油膜,即滑移界面。当滴加极性液体后,液体会在拉普拉斯压差的作用下实现定向输运,其自输送原理同上述的润湿图案化表面,即液滴前后端会因为液滴的半径不同而出现拉普拉斯压差梯度,从而驱动液滴运动。值得注意的是,这种方式可以有效地解决润湿图案化表面的弊端,即可以实现液体的无损输运[29],从而可以减少不必要的液体浪费。但是缺点主要存在与激发滑移界面的液体容易从楔形区域脱落,从而失去其作用。
上述两种润湿模式(即非均质化润湿模式和均质化润湿模式)的几种典型表面,液体在其上的输运情况、驱动方式、存在的缺点被总结到表1 中。

图14 依靠弯液面产生的毛细力实现液体自输运的滑移表面[84,97] Fig.14 Slippery surface to realize directional and spontaneous water transport triggered by meniscus: (a)-(k) liquid transport driven by capillary force on slippery surface triggered by oil film[84]; (l)-(m) slippery surface triggered by hierarchical microchannels for water transport under capillary force[97]

表1 不同功能性表面的输运特性、驱动力来源与存在的不足 Tab.1 Property of different functional surfaces and their driving forces, drawbacks
3 液体自输送功能性表面的典型应用
3.1 水汽收集
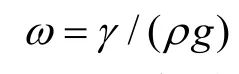
在缺水地区,收集空气中的水分是解决水资源缺乏的有效措施之一。通常来说,空气中的水分被利用主要包含以下三部分:冷凝、收集、运输。其中,冷凝主要依靠两种方式,分别是水膜冷凝和液滴冷凝[99-101]。水膜冷凝指的是冷凝的水汽形成一个连续的水薄膜,液滴冷凝指的是收集的水汽以液滴的形式来收集。考虑到在相转变过程中热传导效率,以液滴冷凝的方式进行水汽收集的效率是以水膜冷凝收集效率的10 倍以上,并且液滴冷凝方式的热传导效率可以通过在基底材料上加工微/纳结构来进一步提高[102-104]。同时,对于水膜收集方式,随着收集的进行,一旦水膜形成后,该表面便失去了其收集能力。因而,以液滴冷凝的方式进行集水具有更好的研究前景。LUO Hu 等人[105]也通过电化学刻蚀和化学沉积结合的方式,在铝基底上得到以液滴冷凝的方式来实现集水的系统。相比于普通铝只能以水膜的形式冷 凝,该系统可以通过液滴的形式来实现水的收集,从而大大提升集水的效率。其共分为三部分:收集区域、运输区域以及储存区域,如图15d、e 所示。收集区域为冷却平台,将空气中的水汽凝结成液滴;运输区域呈楔形,在其上的液滴会产生一个拉普拉斯压差梯度,在拉普拉斯压差的作用下逐渐向储存区域汇集。
水从空气中被功能性材料收集,在本质上主要是归功于独特的润湿性或特殊结构形貌,这两者增强了水的冷凝效率。在润湿性方面,YANG Xiao-long 等人[106]通过电化学刻蚀以及化学处理得到润湿图案化表面,如图15a—c 所示。实验表明,该润湿表面能够达到高冷凝效果和水收集效率。在结构方面,TIAN Ye 等人[107]受蜘蛛丝的启发,通过一种水中微流控的方法,精确制备出一种带有腔结的纺锤节微纤维(命名为腔结微纤维)。腔体的设计和聚合物的组成赋予腔体微纤维独特的表面粗糙度,使其具有优异的集水性能。水滴在表面上不断增大,最终受到结构的影响而产生不平衡的拉普拉斯压差,使得液滴最终被输运到相邻的液滴上并合并,最终实现水滴的收集,如图15f、g 所示。
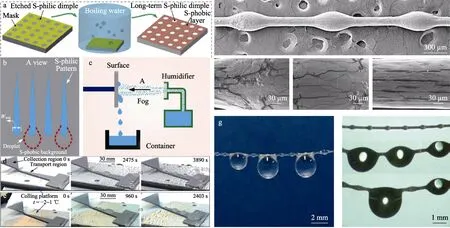
图15 不同应用于集水、运输液滴的表面[105-106] Fig.15 Various surfaces used for water collecting and water transport[105-106]
相比上述依靠冷凝、运输来实现水收集的模式,薄壁多孔材料中的双面润湿性模式具有快速到达储水区域的优点[96]。同时,双面润湿性模式的材料由触疏水性铜网(孔径250 μm)和亲水棉组成,吸附在铜网上的小水滴在10 ms 内可定向转移到亲水棉吸附剂中,而不受设备放置方向的影响,如图16 所示。对于此类设计,超疏水网格的大小以及疏水性直接影响收集水的效率。超疏水网格的作用在于可以实现定向输送以及使得表面在上一滴水收集完成后可以快速转移至亲水,使表面继续干燥,为接下来的集水做好准备。这类集水设备的优点在于可以快速实现水分收集,效率较高。但是由于网格的大小和疏水性综合影响着集水效率,因而设计较为复杂。
3.2 油的输运
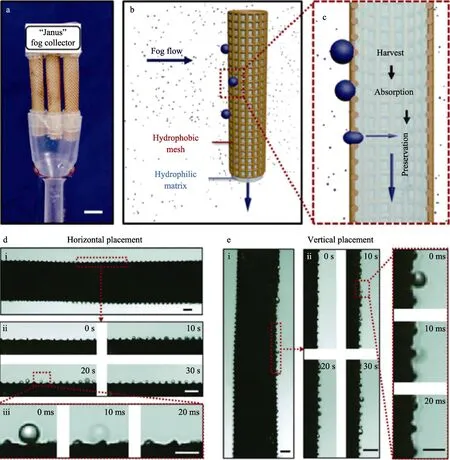
图16 双面润湿性模式集水模式[108] Fig.16 Janus wettability model for water collecting[108]
具有低表面张力的液体,如石油,是现代工业发 展的动力来源。含油液体的自发定向输送,由于其在海洋石油开采和溢油清理中的科学意义和现实前景而受到广泛关注。目前油在功能性表面的输运主要分为在水下的输运和空气中的输运,其功能的实现主要依靠特殊的表面形貌、润湿性,或者两者的结合。
水下油的输运方面,主要运用了均质化润湿模式中的拉普拉斯压差驱动表面(2.2.2 小节)。YANG Xiao-long 等人[110]通过在选择性氧化工艺法加工出图案化表面,该图案化表面表现出强烈的水下油润湿性对比,使得油滴被限制在图案中。油滴被放置在由平滑通道连接的润滑图案上,由于两油滴之间存在拉普拉斯压力的差异,油滴会自发地交换液体,直到它们的形状达到平衡为止,如图17a—f 所示。值得注意的是,此平衡不仅仅是小液滴到大液滴或者大液滴到小液滴,实验中通过控制滴加油的体积和固-液接触 直径,甚至可以实现双向运输,如图17g 所示。SHANG Wei-feng 等人[111]在石墨板上制备出润湿梯度表面,实验表明,在水下油可以从疏油侧运输到亲油一侧。
空气中油的运输方面,LI Xing 等人[109]通过光刻技术和PDMS 成形技术制备了中间有不同微结构的沟槽。实验发现,微结构形貌对定向输送有重要影响,同时微结构形貌还影响输送距离。作者在实验中引入了无量纲变量λ=d/D来描述微结构的形貌特点,如图17h、i 所示。当λ增大时,液体输送由双向输送变为定向输送,且定向性能更佳。作者将前进的距离和后退的距离表示为sL和pL,液滴的半径记作R,随着λ增大,s/L R、p/L R逐渐增大,表明定向性变好。相比于其他几种形状,当沟槽中间微结构呈V 型时,油滴可以实现最长距离的输送和最大程度上避免油的双向运输。
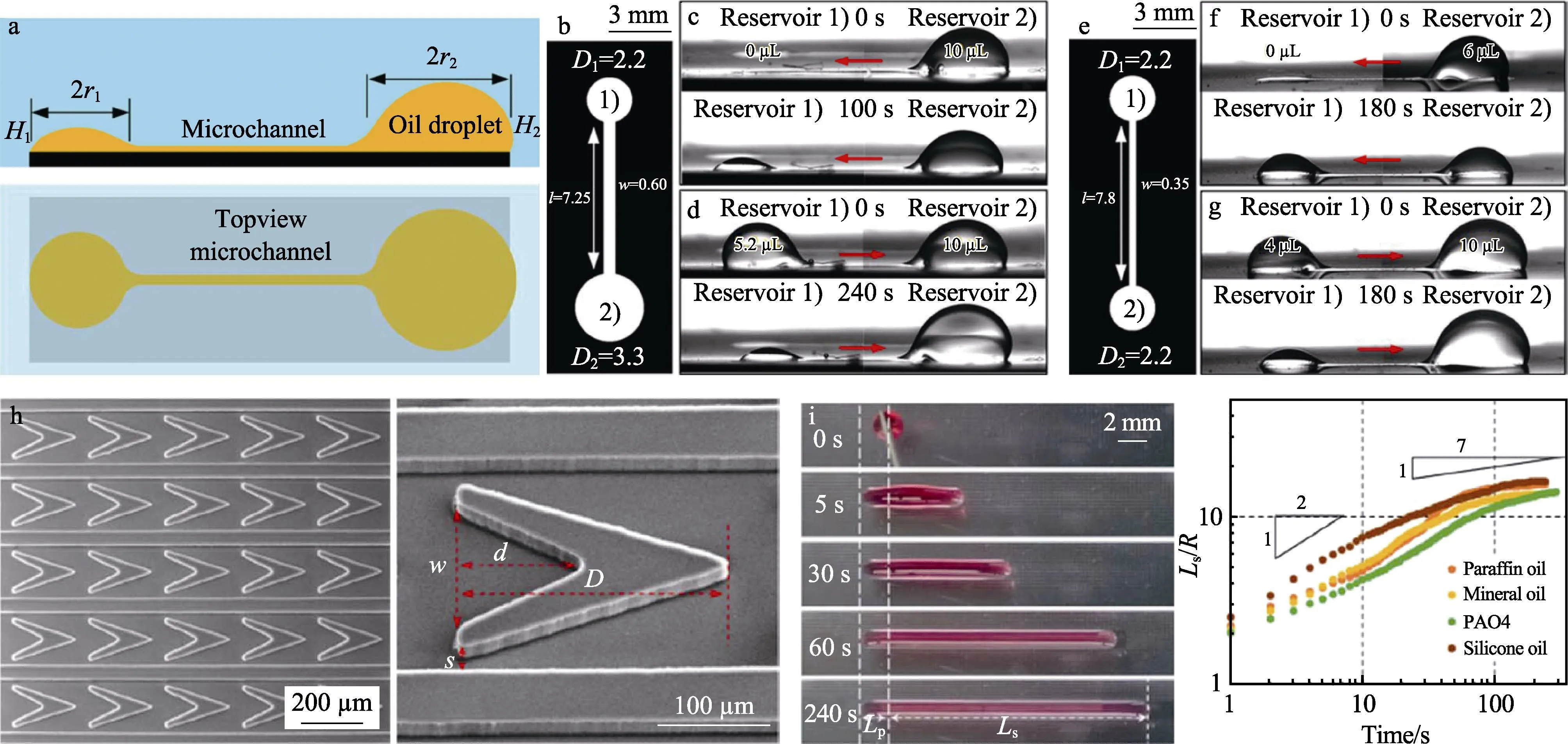
图17 用于油输运的功能性表面[97] Fig.17 Functional surfaces for oil transport[97]
4 润湿稳固性及其可能的解决措施
本节所讨论的润湿稳固性主要分为两种,第一种是疏液表面的机械稳固性,主要指超疏液表面[112];第二种是亲液表面的耐久性,主要指超亲液表面。疏液表面的机械耐久性是指其表面在经过强摩擦磨损后仍能保持其疏液特性的能力。上文提到的Cassie- Baxter 润湿模型中,液体与疏液表面上的微纳织构接触的同时,在液滴和表面之间存在一个“空气垫”。空气垫的存在使得液滴不能直接与固体的大部分表面接触,从而使得液滴无法直接与大部分固体表面接触,来实现疏液的特性。因而,上述原理决定了对于超疏液表面应该具备以下两个特征:微纳织构化表面和表面具备非极性的化学特征。这两大特征也决定了超疏液表面的两种制备思路,即在低表面能的表面增加其粗糙度,亦或是在粗糙表面(微纳织构化表面)降低其表面能,这些粗糙表面往往具备一定形貌的微结构[129-130]。于是,疏液表面的机械稳固性在本质上主要是这些表面上的微纳织构,在机械磨损或者化学磨损下,保持其形貌特性且不失效的能力。
对于具有机械稳固超疏液表面的制备,目前的方法主要分为以下三种[114-120]:第一种方法类似于生命体细胞受损后的自修复,即疏液表面在经过机械磨损后可以实现自修复[112-116];第二种方法是制备具有自相似的结构,即表面在经过摩擦以后,新暴露出来的表面仍具有超疏水特性[114-115,117];第三种方法是弱化微纳结构顶端的压力,从而使得织构不易于受损[118-123]。Peng 等人[117]采用结合后两种方法,以含氟环氧树脂、全氟聚醚和含氟聚合物纳米颗粒为基本材料。环氧树脂的机械和化学稳定性较好,其亲水性官能团具有分散纳米颗粒的能力和很强的与基底粘附能力。含氟聚合物纳米粒子提供了所需要的织构特性和低表面能特性。在经过一系列的机械磨损测试后,如滚轮-盘摩擦、将胶带在载荷下滚压再揭开测试和化学腐蚀测试,仍具备出色的超疏水特性。总而言之,尽管上述三种方法可以一定程度上减缓疏液表面的磨损,但由于其并非根本上增加疏液层的强度,因而严重限制了这些表面的应用前景。
功能性表面超亲液区域在时间上具有耐久性,主要原因是该表面在空气中放置,与空气中的有机基团参与反应,最终会丧失表面的亲液性能。固体表面达到所需要的亲液特性主要依靠粗糙表面以及较高的表面能。粗糙表面微结构结合较高的表面能可以形成毛细管效应,使得表面变得亲液。因而,固体表面失去亲液特性主要原因是与空气中的有机基团参与反应使表面能降低所致。目前常用的制备出所需要的粗糙表面的方法有喷涂法[10]、激光刻蚀[123]、阳极还原法[124-125]、3D 打印[127]等。其中,喷涂法是指在某些固体表面喷涂一些纳米粒子,众多的纳米粒子在特定的方法下可粘附[10]或镶嵌[125]在固体表面,众多的纳米粒子会形成类似于毛细管原理的集群结构。激光刻蚀法,激光高能量密度、脉冲性导致微结构的形成,激光刻蚀过程中,材料迅速升温熔融,甚至升华,然后迅速冷却形成了微织构,而吸附在微结构的纳结构是由于激光加工过程中的等离子体再沉积形成的[124],因而微纳结构的存在将形成众多的微毛细管。阳极还原法,材料(如钛)在经过阳极还原后会在表面生成众多的微孔结构,由此形成毛细管作用[22]。总之,尽管制备方式多样,其本质即是让固体表面形成所需要的微纳结构,众多微结构构成毛细管结构。针对形成毛细管结构所需要的第二点,即较高的表面能,常用的方法是喷涂亲液性粒子[126]、化学修饰[29,127]、等离子体溅射[97],或者水浴加热[125]。通过上述方法可以恢复表面较高的表面能,从而恢复表面的亲液特性。
5 结语
本文从自输送表面的设计与优化角度出发,总结了目前固-液表面的接触状态以及固体表面微观形貌对固-液接触状态的影响。在此基础上,对现有的液体自输送表面进行了分类,并介绍了各种液体自输送表面输运液体的机理。随后,对液体自输送功能性表面的典型应用进行了介绍。最后,提出了目前自输送表面存在的润湿稳固性及其可能的解决措施。
从流体自输送发展前景来看,总体来说,目前液体自输送功能性表面存在如下三方面的问题:
1) 第一方面问题是由于其几何形状或者驱动原理的限制,严重限制了其输运距离。如梯度润湿表面和锥体表面,由于随着距离的增加,其楔形的形状会导致末端的宽度增加,从而会在表面上留下较多的液体,造成不必要的浪费;梯度润湿表面由于接触角梯度的限制,其距离很难继续延长;毛细力驱动滑移表面,由于毛细力的毛细长度限制,因而输运距离也很难提升。
2)第二方面问题是这些表面制备工艺较为复杂,需要专门的设备,如光刻法,因而严重限制了这些表面的大批量应用。
3)第三方面问题是拉普拉斯压差和毛细力所产生的驱动力不足,无法克服固液接触所产生的阻力。目前大多数的液体自输送表面均用于在空气中输送水,很少用于输送油,特别是低表面张力或者高黏度的油。这是由于相比于油,水的表面张力较高,因而在表面张力的作用下会产生更大的驱动力,实现液滴的输送。而目前大多数超疏液表面不疏油或者其对油的粘附性较高,高的粘附性会产生较大的阻力,从而阻碍了液体的输运。
针对上述出现的三方面问题,可以从原理优化设计角度出发,有望取得突破,主要分为以下三点:
1)增大楔形表面和锥体表面输运距离,可以分别通过多个楔形形状首尾串联,或多个锥体首尾串联来实现。以楔形为例,可以将第一个楔形的宽端与相邻第二个楔形窄端连接,并采用合理方式过渡,以克服能量壁垒,并依次进行下去,从而实现有效的长距离运输,锥体亦然。针对梯度润湿表面,可以通过综合优化梯度润湿表面微结构的形貌、尺寸、间距和润湿性区域尺寸,使上述参数达到最佳匹配,以期达到最大毛细梯度和固液接触阻力,从而实现液体的长距离自输运。针对毛细力驱动滑移表面所出现的毛细长度限制,可以通过液滴合并对外做功角度,来克服毛细长度的缺陷,或者利用滑移表面低阻力的优势,在表面实现不同驱动模式与其的组合。
2)发展适合大批量生产的且不需要大型设备的表面,如喷涂法。
3)由于自输送表面的驱动力大多来源于液体自身表面张力,因而在充分利用其驱动力的同时,可以从减小与基底的摩擦出发。现有的表面大多数是固体表面,固-液接触产生的阻力要远远大于液-液接触和气-液接触。因而,通过优化设计理念,将固-液接触转化为液-液接触将会对提升自输送表面输送性能起到重要作用。
研究液体自输送表面将对减少能量浪费、提升人们的生活效率有着一定的经济和社会价值。本文对认识和深入理解液体自输送表面有一定的指导意义,同时有望对优化设计液体自输送表面提供一定的理论和技术指导。
猜你喜欢
煤炭学报(2021年2期)2021-03-24
作文·小学低年级(2020年6期)2020-07-14
中华老年口腔医学杂志(2016年4期)2017-01-15
西南石油大学学报(自然科学版)(2016年6期)2017-01-15
现代计算机(2016年11期)2016-02-28
西安石油大学学报(自然科学版)(2015年4期)2015-12-16
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
中央民族大学学报(自然科学版)(2014年2期)2014-06-09
郑州大学学报(理学版)(2014年3期)2014-03-01
郑州大学学报(理学版)(2014年3期)2014-03-01