
基于模糊PI的永磁同步电机矢量控制
2021-01-27 03:41吴钦木
计算机与现代化 2021年1期
郑 飞,吴钦木
(贵州大学电气工程学院,贵州 贵阳 550025)
0 引 言
近年来,永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)由于体积小、效率高、易于控制和能量密度高等性能优势,广泛应用于工业机械领域,如电动车用电动机,冰箱、空调压缩机使用的电动机以及其他的一些高精尖产业[1-5]。目前针对永磁同步电机的主流控制方式有矢量控制和直接转矩控制,但是由于直接转矩控制具有较大的脉动转矩,因此大都采用矢量控制组成永磁同步电机伺服控制系统[6-8]。然而不管是永磁同步电机矢量控制系统还是直接转矩控制系统,其控制回路都包括传统PID控制器,而且在当今工业控制领域中,带有PID控制器的控制回路占90%以上[9-10]。当永磁同步电机运行在精度要求不高、工作环境变化小的时候,由于传统PID具有算法简单、适应性高、鲁棒性强等特点,其矢量控制系统中采用一般的PID控制器完全能达到控制要求。但是传统PID控制参数是固定不变的,对环境变化的自适应性能较差并且控制参数往往整定不良。当永磁同步电机运行的环境恶劣变化时,如冰箱压缩机用永磁同步电机工作的环境往往比较恶劣,在永磁同步电机矢量控制系统中采用传统PID控制器往往得不到较好的控制效果,除此之外永磁同步电机还是一个复杂、非线性、时变的控制对象[11-15]。因此许多学者对永磁同步电机矢量控制系统中的PID控制器进行了大量研究。文献[16]提出了一种抗积分饱和算法对永磁同步电机矢量控制系统传统PI控制器进行改进,改善了永磁同步电机速度控制性能。文献[17]在永磁同步电机矢量控制系统采用模糊PI进行控制,得出采用模糊PI控制时比普通PID控制器缩短了系统调节时间。文献[18]在永磁同步电机矢量控制系统中采用自适应模糊控制算法对传统的PI控制器进行改进,提高了永磁同步电机的动、静态性能。也有些学者在永磁同步电机矢量控制系统中采用新兴算法对传统PID控制器进行改进,如基于神经网络的PID控制器、基于遗传算法的PID控制器等,但是实践表明目前这类算法在实际应用中的实时性不高。针对此类背景,本文展开基于模糊PI的永磁同步电机矢量控制研究,首先在旋转坐标系d-q下建立永磁同步电机数学模型,然后在永磁同步电动机双闭环矢量控制系统中,基于模糊控制理论对传统的速度环PI控制器进行改进建立模糊PI控制器,最后在Matlab/Simulink平台下进行基于模糊PI的永磁同步电机矢量控制仿真实验,实验结果表明采用模糊PI的永磁同步电机矢量控制系统在动态性能方面缩短了系统调节时间以及减小了系统超调量,在静态性能方面加强了系统的可靠性与抗扰性。
1 永磁同步电机数学模型
永磁同步电机是高阶、非线性、强耦合的复杂系统,因此常常采取双轴理论来建立其数学模型,即在两相旋转坐标系d-q轴下建立数学模型[19-21],如图1所示。
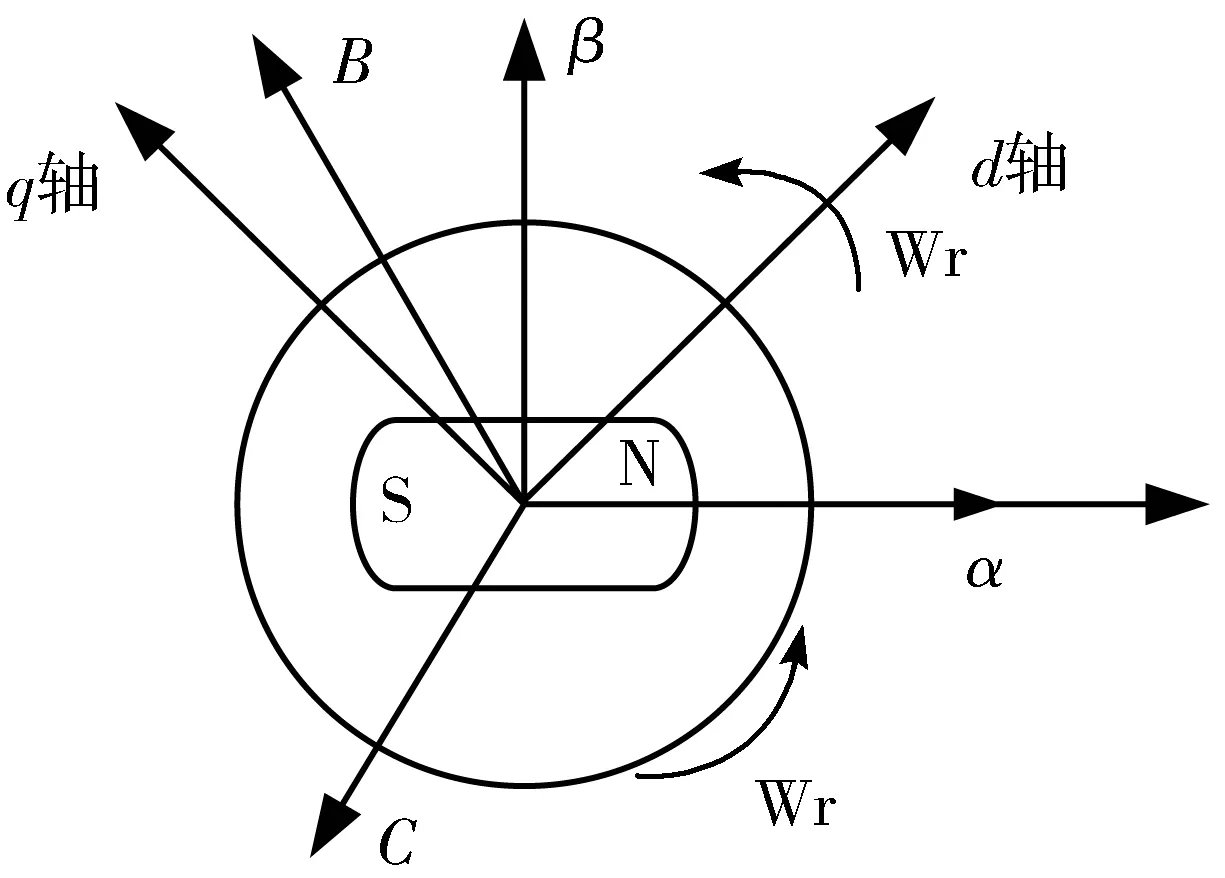
图1 两相旋转坐标系d-q轴
在建立永磁同步电机数学模型之前,进行如下假设:
1)忽略铁芯饱和,不计涡流和磁滞损耗;
2)永磁材料的电导率为0;
4)相扰组中感应电动势波形为正弦波形;
则永磁同步电机在两相旋转坐标系d-q轴系下电压方程为:
(1)
磁链方程为:
(2)
转矩方程为:
(3)
运动方程为:
(4)
式(1)~式(4)中,ud、uq为两相旋转坐标系d-q轴下定子电压;Rs为相电阻;id、iq为两相旋转坐标系d-q轴下定子电流;Ψd、Ψq为永磁同步电机永磁体磁链在两相旋转坐标系d-q轴下分量;we为电角速度;Ld、Lq为d-q轴电感;Ψf为永磁同步电机永磁体磁链;Te为电磁转矩;p为极对数;TL为负载转矩;J为转动惯量。
(1)引进国外先进的成本控制的方法,对公司落后的成本控制方案积极进行改进,只有先进的成本控制方案才能使公司稳定地发展,使公司不断地进步。成本控制要根据实际出发,根据不同的状况制定不同的成本控制方案,使得成本控制更加符合项目工程的需要,通过不断变更成本控制的方案使利益最大化。
2 永磁同步电机模糊PI控制器
模糊控制是将专家知识和经验运用语言变量表述,再利用模糊逻辑等理论形成规则,归纳成为控制算法[22-23],因此不需要精确的数学模型,而这些都在模糊控制器中完成。模糊控制器主要有一维、二维和三维模糊控制器,维数越高控制效果越好,但是其规则也就越复杂,因此本文选择比较常用的二维模糊控制器,其基本结构如图2所示。
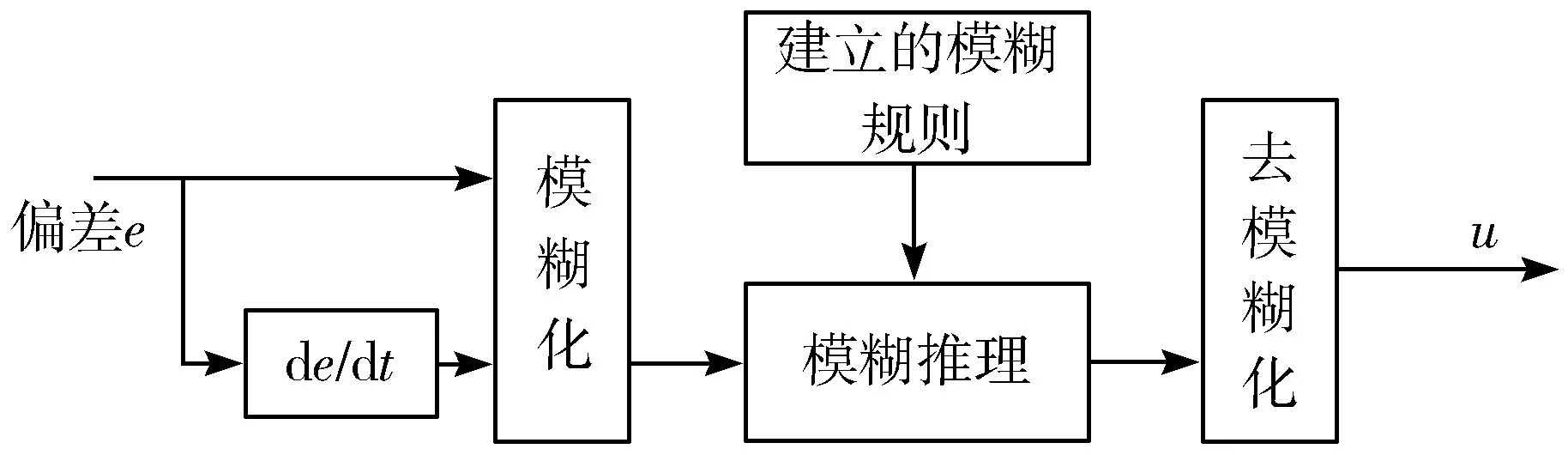
图2 二维模糊控制器基本结构图
二维模糊控制器基本原理为:
1)首先二维模糊控制器输入为系统目标量与反馈量的偏差;
2)然后对系统偏差和偏差的变化率进行模糊化,模糊化的过程是将系统偏差和偏差率的实际范围调整到模糊论域,这样对应的才能变化为模糊语言变量;
3)接下来就是运用专家的知识和经验依据输入的语言变量进行相应的规则调整得到相应的模糊控制集;
4)最后是将模糊控制集合去模糊化得到精确的真实调整值进行输出。
针对永磁同步电机矢量控制系统来说,速度调节器起着至关重要的作用,其输出作为电流环输入信号,因此需要设计得比较稳定可靠,对负载要有较好的抗扰性并且要具有较好的动态性能,因此本文在永磁同步电机矢量控制系统的转速环采用模糊PI控制器来改进传统的PI控制器,在传统PI控制器基础上加入模糊控制器,对传统PI参数进行调节,以此增强系统的动、静态性能,其建立过程如下:
1)首先确定模糊控制器的语言变量,即表示模糊控制器输入量和输出量的大小程度,一般情况下用词集{负大,负中,负小,零,正小,正中,正大}表示,其英文对应的是{NB,NM,NS,ZO,PS,PM,PB};
2)隶属度函数选择,不同的隶属度函数具有各自优缺点,本文对于永磁同步电机矢量控制系统选择正态分布型和三角形结合的方式;
3)对转速环输入信号,即转速偏差和偏差变化率进行模糊化,将其变化到模糊论域中,本文选择偏差e和偏差变化率ec,输出参数变化值ΔKp、ΔKi的模糊论域都为[-3,3],需要选择适当的量化因子将真实的偏差变化到模糊论域中,若设真实偏差变化范围为[-x,x],模糊论域为[-h,h],则量化因子选择为:
(5)
对于输出也是同样地需要选择适当的比例因子将模糊控制集变化到真实的输出控制量即参数变化量中,若设真实的参数变化量输出范围为[-u,u],模糊控制集为[-l,l],则比例因子选择:
(6)
4)建立模糊控制规则,模糊控制规则是对专家知识和经验加以归纳总结形成的语句,一般转化为关系如“if…then…”语句,针对永磁同步电机矢量控制系统中转速环的PI控制器而言,理性的PI参数变化情况为:在转速偏差e较大时,为提高系统响应速度,比例参数变化量ΔKp应该取较大值,为防止响应的过程中产生大的超调量,应当限制积分饱和,则积分参数变化量ΔKi应该取较小值;当转速偏差e和转速偏差变化率ec的值居于中等水平时,为保证在降低超调的同时还能够保持一定的响应速度,比例参数变化量ΔKp的取值宜酌情减小,同时ΔKi的取值大小要适中;当e值比较小时,为消除系统静态误差,ΔKp和ΔKi取值应该适当地偏大。综上,可制定ΔKp和ΔKi的模糊规则表,见表1和表2。
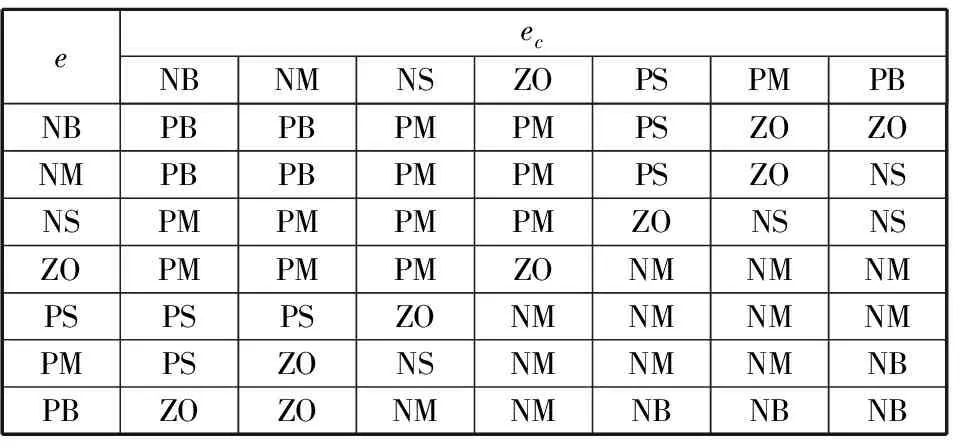
表1 ΔKp模糊规则表
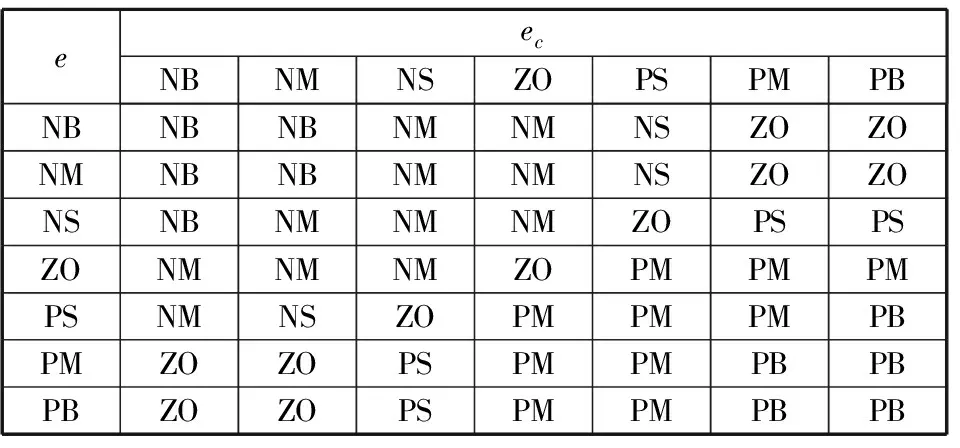
表2 ΔKi模糊规则表
综上,永磁同步电机矢量控制系统的转速环的模糊PI控制器结构如图3所示。

图3 转速环的模糊PI控制器结构
3 建模仿真
实验在Matlab/Simulink环境下进行,选取的永磁同步电机参数如表3所示。
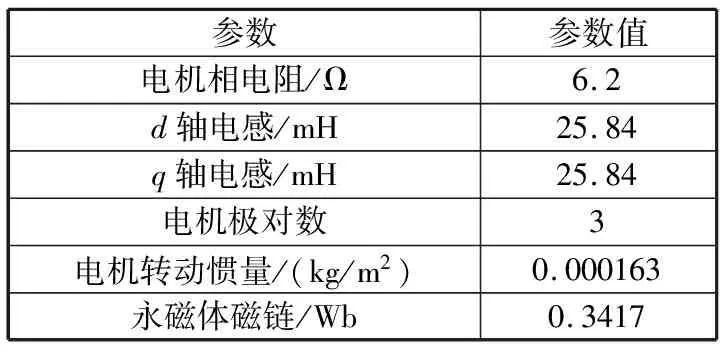
表3 永磁同步电机参数
系统采用id=0矢量控制策略,转速环的模糊PI控制器模型如图4所示,基于模糊PI的永磁同步电机矢量控制系统仿真模型如图5所示。
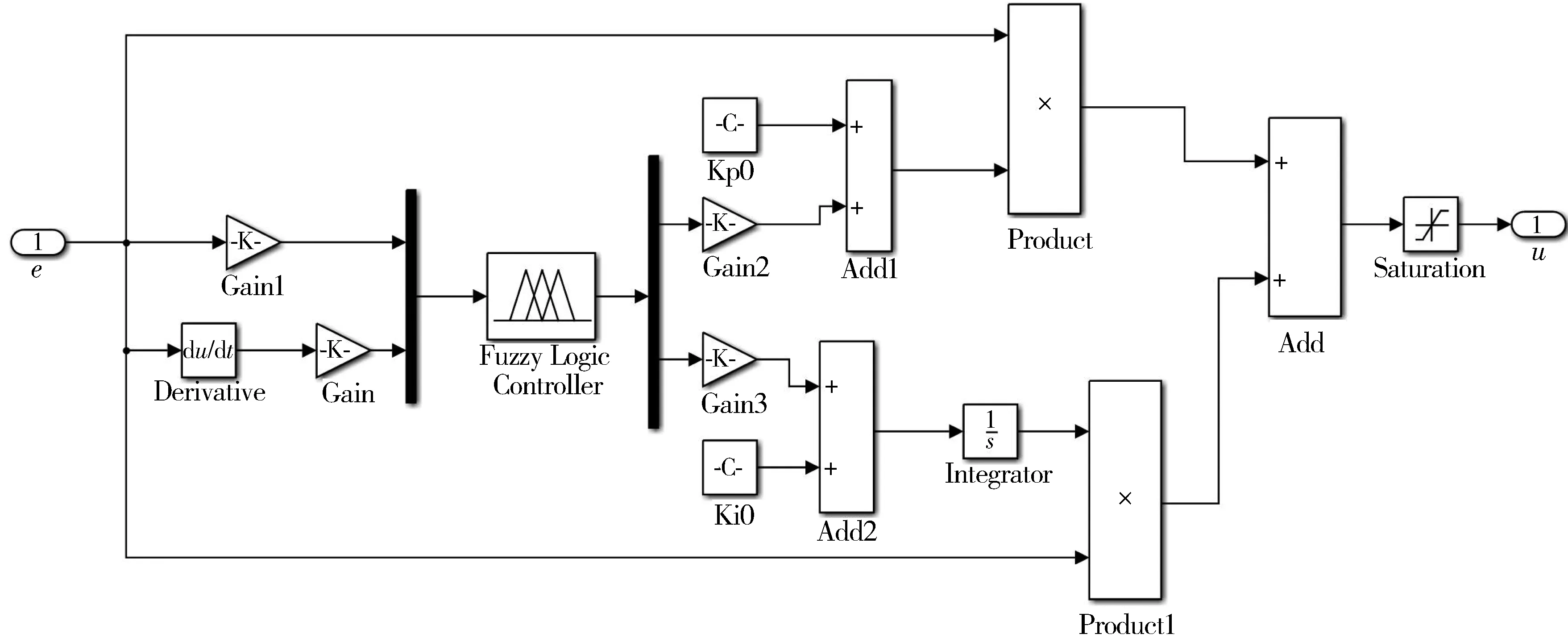
图4 转速环的模糊PI控制器
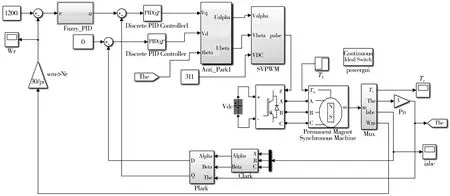
图5 基于模糊PI的永磁同步电机矢量控制系统仿真模型
图6为转速环采用传统PI控制器的永磁同步电机矢量控制仿真实验结果,仿真条件为:仿真时间0.6 s,给定转速为1200 r/min,电机初始时刻空载运行,在0.3 s时突加2 N·m负载转矩。
图7为转速环采用模糊PI控制器的永磁同步电机矢量控制仿真实验结果,仿真条件为:仿真时间0.6 s,给定转速为1200 r/min,电机初始时刻空载运行,在0.3 s时突加2 N·m负载转矩。
对比图6(a)与图7(a),系统采用传统的普通PI控制器时,转速超调超过了1400 r/min以上,而系统采用模糊PI控制器时,转速超调最高也没达到1400 r/min,以上能够明显地看出,转速环采用模糊PI控制器时,系统的超调量比转速环采用传统的普通PI控制器时要小,对比图6(b)与图7(b),系统采用传统的普通PI控制器时,转速调节时间在0.02 s,而系统采用模糊PI控制器时,转速调节时间只需要0.005 s,能够明显地看到转速环采用模糊PI控制器时,系统的调节时间比转速环采用传统的普通PI控制器时要短,因此可以看出,基于模糊PI控制器的永磁同步电机矢量控制系统相对于基于传统PI控制器的永磁同步电机矢量控制系统具有更加优越动态性能。
对比图6(c)与图7(c),在0.3 s系统突加负载后,系统采用传统的普通PI控制器时,转速被拉低到1120 r/min再次进行调节,而系统采用模糊PI控制器时,转速还没有被拉低到1160 r/min,因此可以看出,基于模糊PI控制器的永磁同步电机矢量控制系统相对于基于传统PI控制器的永磁同步电机矢量控制系统具有更强的可靠性与抗干扰能力,所以基于模糊PI控制器的永磁同步电机矢量控制系统相对于基于传统PI控制器的永磁同步电机矢量控制系统具有更优越的稳态性能。
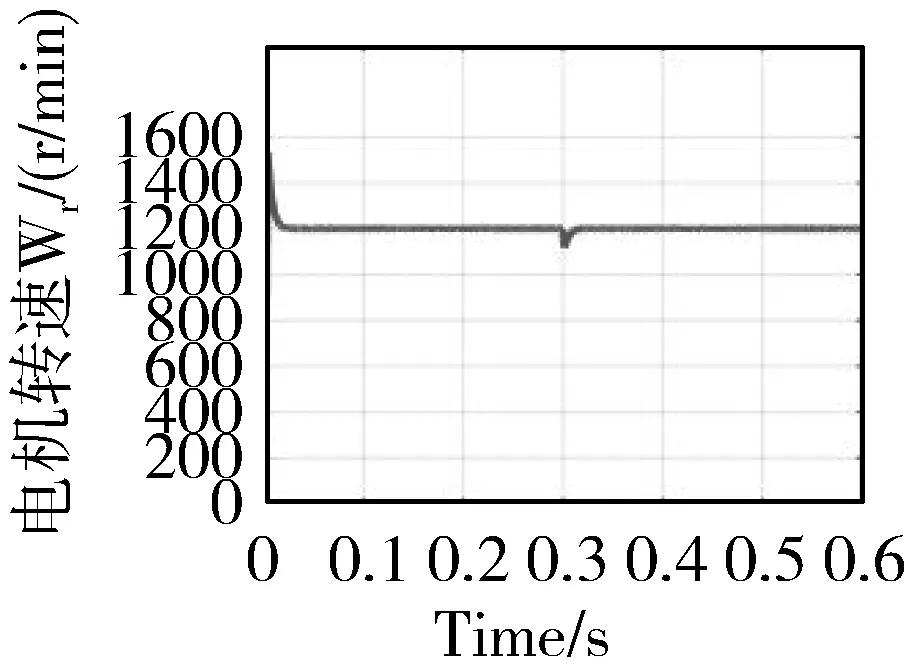
(a)电机转速波形
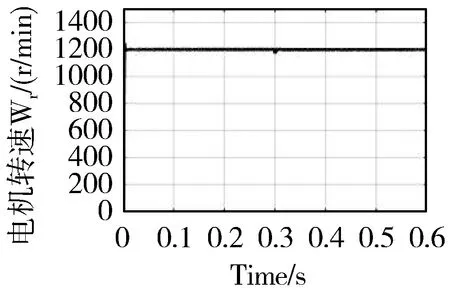
(a)电机转速波形
对比图6(d)~图6(e)与图7(d)~图7(e),在整个运动范围能够看到转速环采用模糊PI控制器时与转速环采用传统的普通PI控制器时,电机电磁转矩都能够很好地跟随系统变化,并且可靠稳定,因此转速环采用模糊PI控制器时在系统整体运动工况也具有优越的性能。
4 结束语
本文对基于模糊PI的永磁同步电机矢量控制系统进行了研究,首先基于双轴理论建立永磁同步电机数学模型,进一步基于模糊控制理论研究设计永磁同步电机模糊PI控制器,最后对转速环采用模糊PI控制器与转速环采用传统的普通PI控制器的永磁同步电机矢量控制系统进行对比实验,得到以下结论:
1)转速环采用模糊PI控制器时,系统的超调量比转速环采用传统的普通PI控制器时要小;
2)转速环采用模糊PI控制器时,系统的调节时间比转速环采用传统的普通PI控制器时要短;
3)转速环采用模糊PI控制器时,系统具有更强的可靠性与抗干扰能力;
4)基于模糊PI控制的永磁同步电机控制系统在系统整个范围也具有较好性能。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
