
lmpact of binocular visual field loss on driving performance in glaucoma patients
2021-01-17 13:08ZhenYingJiangJingChenJingYaoShaoHongQian
Zhen-Ying Jiang, Jing Chen, Jing Yao, Shao-Hong Qian
1Eye Institute and Department of Ophthalmology, Eye & ENT Hospital, Fudan University, Shanghai 200031, China
2NHC Key Laboratory of Myopia (Fudan University); Key Laboratory of Myopia, Chinese Academy of Medical Sciences and Shanghai Key Laboratory of Visual Impairment and Restoration, Shanghai 200031, China
3Faculty of Arts and Science, New York University Shanghai, Shanghai 200122, China
4NYU-ECNU Institute of Brain and Cognitive Science at New York University Shanghai, Shanghai 200122, China
Abstract
INTRODUCTION
Glaucoma may result in significant visual impairment, thereby affecting human’s quality of life, such as driving[1]. Previous population-based investigations have reported that glaucoma is an important risk factor for motor vehicle collisions in western countries[2-3]. Moreover, glaucoma patients can make more at-fault critical interventions in driving than normally-sighted individuals[4-5]. However, since car ownership per capita in Asia is significantly lower than that in western countries, few research on glaucoma patients’ driving performance has been conducted in eastern Asia countries such as China and Japan[6].
A few studies have utilized driving simulation to evaluate driving safety in relatively small samples of glaucoma patients. Several studies showed that glaucoma patients had more problems in lane keeping, obstacle avoidance[7], under simulated fog conditions[8], or moved their steering wheel more actively[7]. Conversely, another study suggested that binocular visual field loss (VFL) did not necessarily influence driving safety, because patients could adapt their viewing behavior by increasing their visual scanning[9]. The report from Japan found that the degree of collision risk depended on the area and degree of VFL, especially in terms of integrated visual field (IVF) sensitivity[6]. Besides, the driving difficulties of those with glaucoma on real roads have also been studied. Such reports had highlighted problems in maintaining lane position[10-11]and keeping to the path of the curve in drivers with glaucoma[10], while driving errors were more likely to occur at traきc-light intersections and give-way situations[11].
Almost all the previous simulator and on-road studies focused on old-aged glaucoma drivers with the range of average age from 50 to 70y[4,8,10-11]. However, most drivers in China are much younger (19 to 58y)[12]. Therefore we included only young and middle-aged glaucoma patients in this study to find the impact of VFL on lane keeping. Current licensure requirements by motor vehicle departments in most countries (including China) are mainly based on visual acuity measures only rather than assessment of VFL[13]. This article hopes to give a reference for practitioners to identify glaucoma patients who have lost their driving fitness.
SUBJECTS AND METHODS
Ethical ApprovalThis study adhered to the tenets of the Declaration of Helsinki and was approved by the Ethics Committee of the Eye and ENT Hospital of Fudan University. All participants were given a full explanation of the experimental procedures and written informed consents were obtained.
ParticipantsNineteen participants with glaucoma were recruited from the Glaucoma Clinic Database of the Eye and ENT Hospital of Fudan University (Shanghai, China) from May 2013 to Apr. 2018. Ten age-matched controls were recruited from our database of normally-sighted volunteers. All participants were recruited simultaneously and using the following criteria: 1) current drivers who hold driving license in China and had adequate driving experience (>2y); 2) age≤45; 3) no sign of dementia according to the Chinese version of Mini-Mental State Examination (cMMSE)[14]; 4) no ocular or visual pathway disease leading to central VFL other than glaucoma; 5) no color blindness and color weakness; 6) no psychiatric/neurological disorders.
Visual AssessmentAll participants underwent a general eye examination, including binocular visual acuity test, slitlamp biomicroscopy, and ophthalmoscopy. Monocular visual field assessment was conducted in each eye using the routine G dynamic procedures on Octopus 900 Perimetry (Haag-Streit, Switzerland). This size III white stimulus presentation pattern consisted of 74 locations within central 30° in standard conditions using the full threshold strategy. The stability of fixation was monitored through the video eye monitor during whole examinations. And those whose reliability factor (RF), combining with false positive and false negative responses, greater than or equal to 15 would be excluded from the group. By measuring the visual field sensitivity of monocular central 30°, a binocular IVF was constructed by combining the monocular visual fields based on the better sensitivity of the two eyes at every visual field location[15]. Then the overall visual field was divided into three subregions (central 10°, superior and inferior field) for further analysis.
In order to assess binocular VFL, the participants with glaucoma then performed an automated binocular Esterman visual field test (EVFT). The EVFT examined more than 130° visual field and consists of 120 test points, in a suprathreshold manner with a size III white stimulus at intensity of 10 dB. False positive and false negative responses were accessed in a similar fashion to the monocular programs. In the binocular mode, the video eye monitor was aligned to the bridge of the nose, thus the stability of fixation was monitored indirectly by observation. However, all participants had undergone at least two previous visual field examinations so that participants with a history of poor fixation were excluded from the study.
The EVFT is the current gold-standard for classifying visual fields with regard to legal fitness to drive in the UK. Refer to the visual field requirements for Group 1 (ordinary license) specified by the Driver Vehicle Licensing Authority (DVLA) in the UK[16], scattered single missed points or a single cluster of two or three contiguous points in the area within 20° of fixation indicates “pass”. However, unacceptable central defects include the following conditions: a cluster of four or more adjoining points that is either wholly or partly within the central 20° area; loss consisting of both a single cluster of three adjoining missed points up to and including 20° of fixation, and additional separate missed point(s) within the central 20° area. Above conditions are classified as “fail”. As showed in Figure 1, the participants with glaucoma were divided into EVFT pass group and EVFT fail group.
Driving Simulation TestThis driving simulation test was designed as a frequency-based analysis of lane-keeping task to evaluate driving performance. Participants viewed the display on a large screen (118°×86°) with their eye level aligning with the center of the screen. The area of interest for this task was a simulated straight lane in the upper part of Figure 2. The parameters of the lane shown in the lower part were set according to the standard highway lane markers specified by the U.S. Department of Transportation (2004).
The driving test simulated steering a virtual vehicle down a straight lane, at the speed of 43.2 km per hour, over a textured ground plane (depth range: 1.21-100 m) while facing crosswind perturbation to the vehicle’s direction of movement (i.e., heading). The perturbation function u consisted of the sum of seven harmonically unrelated sinusoids from 0.10 to 2.19 Hz as frequency. The u was given as a function of time (t):

Where airepresents the amplitude and ωirepresents the frequency, ρiis a random phase offset drawn from the range -π to π in each trial, and D is the disturbance gain. This sumof-sinusoids perturbation series made crosswind perturbation appear to be random, but the total vehicular-heading rotation rate due to crosswind perturbation averaged 8.37° per second (peak=30.95°/s).
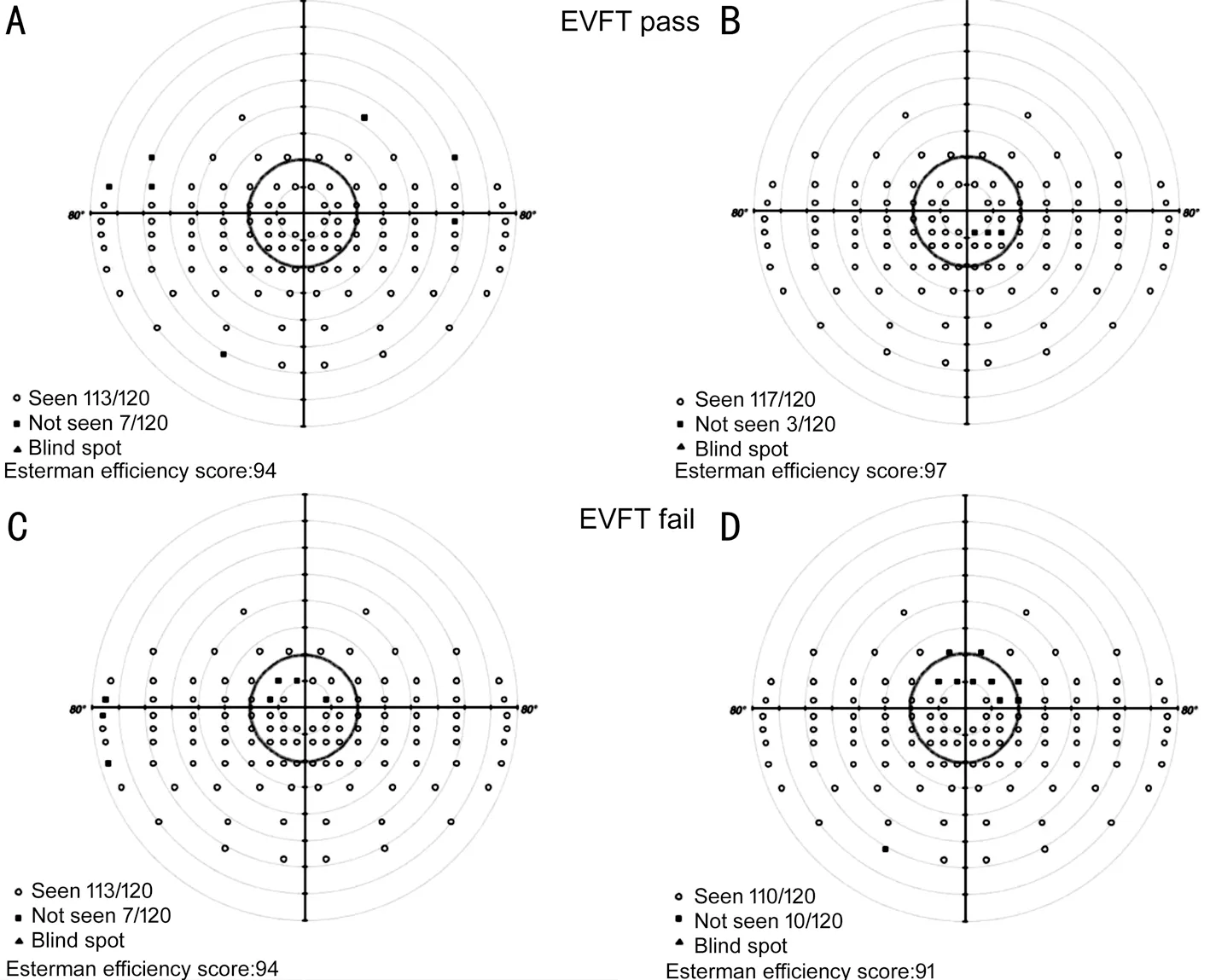
Figure 1 Binocular Esterman visual field test results A, B: Patients pass because there is no significant defect within the central 20° area (indicated by the circle); C, D: Patients fail because the central defect is unacceptable.

Figure 2 Illustration of driving simulation test A: The display (118°×86°) for this task that simulated steering a virtual vehicle down a straight lane; B: The bird’s eye view of a segment of the lane and its parameters.

Figure 3 Set up of the driving simulation test with participant being under examination.
Participants were asked to use a steering wheel (T300 Ferrari Integral Racing Wheel Alcantara Edition, Thrustmaster, La Gacilly, France) to stay in the center of the lane during each 95-second trial, as shown in Figure 3. The experiment included six trials of the lane-keeping control task. Before experiment commenced, all participants received practice trials to get familiar with the task and control dynamics of the steering wheel. The practice continued until participants’ control performance appeared to be stable. Ultimately, there were seven practice trials in each group on average. To avoid fatigue and ensure sufficient break time, participants were instructed to take as much break as needed in-between trials. The whole experiment took about 30-45min. The time series of the vehicular lateral deviation from the center of the lane, the steering wheel’s displacement, and the input heading perturbation were recorded. The data recorded 5s after the start of each trial was analyzed in order to skip the initial transient response.
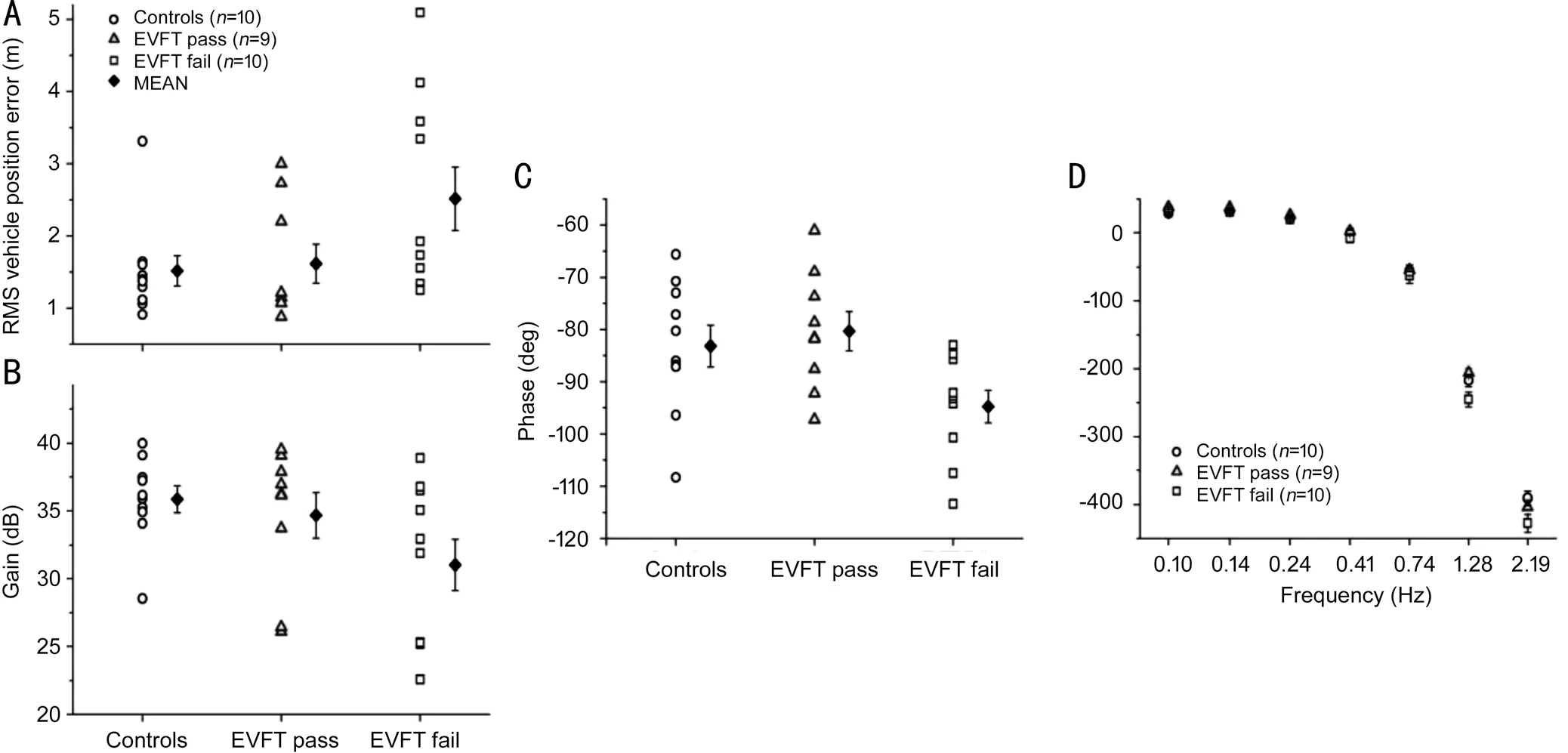
Figure 4 Comparison of the outcomes of driving simulation test between groups A-C: The RMS, gain and phase respectively for each participant, the mean for each group is plotted to the right of the individual results (filled diamond); D: The phase for each group as a function of input perturbation frequency.
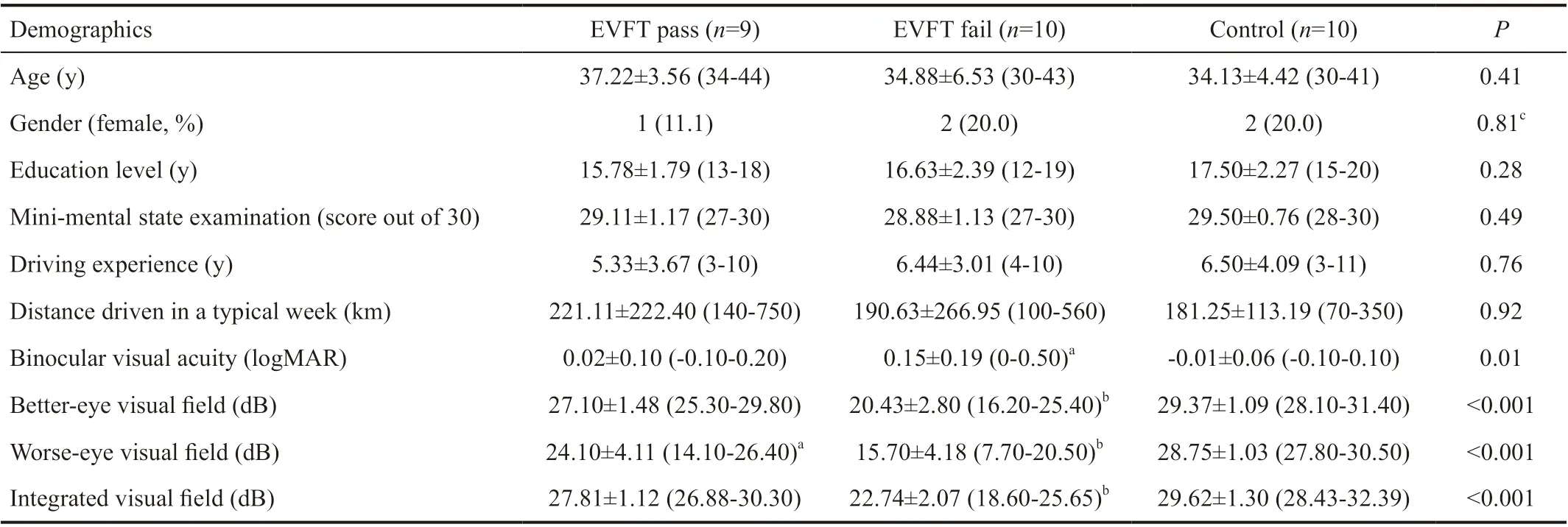
Table 1 Participants’ characteristics and vision function mean±SD (range)
Statistical AnalysisTotal performance error, which reflected overall control precision, was measured as the root-meansquare (RMS) of the recorded time series of the vehicular lateral deviation (in meters). To assess the amplitude of steering wheel and time delay of participants’ controlresponse as a function of input perturbation frequency, we applied Fourier analysis to compute the amplitude (i.e., gain, in percentage of maximum meters) and delay (i.e., phase lag, in degrees) by taking the ratio of the Fourier coefficients of the steering wheel’s displacement (in percentage of maximum displacement) and the vehicular lateral deviation (in meters) in each trial. To examine group diあerences in the lane-keeping task, a one-way analysis of variance was applied on these three groups when normality (and homogeneity of variance) assumptions were satisfied otherwise Kruskal-Wallis test would be used. WhenP<0.05 by variance analysis, further Dennett’st-test and Spearman’s rank correlation coeきcient was applied in the statistical analysis. Finally, in order to reduce the impact of confounding factors, analysis of covariance was applied to examine the group diあerence in the parameters after adjusting for the binocular VFL.
RESULTS
Participants’ characteristics are presented in Table 1. Both glaucoma groups and control group did not diあer with regard to age, gender, education level, cognitive function (cMMSE scores), driving experience and the distance driven in a typical week (P>0.05). Visual function as measured by standard vision tests, especially in terms of visual fields was significantly worse for EVFT fail group (P<0.01).
For the driving simulation test, Figure 4 shows the RMS vehicular lateral deviation, the mean amplitude of steering wheel (gain), the mean time delay of control-response (phase). EVFT fail group made more total performanceerror (RMS: 2.52±1.40 m), less control-response amplitude (gain: 31.02±5.94 dB) and longer delay (phase: -94.78±9.89 deg) occurred than for EVFT pass group (RMS: 1.61±0.81 m, gain: 34.67±5.07 dB, phase: -80.31±11.36 deg) and the controls (RMS: 1.51±0.67 m, gain: 35.86±3.17 dB, phase: -83.15±12.72 deg).

Table 2 Quantitative analysis of driving simulation tests
Detailed test data is presented in Table 2. There were no significant differences in terms of RMS and gain between these three groups (P>0.05). EVFT fail group was significantly worse in terms of phase compared to the other two groups (P=0.02). Further analysis revealed that with increasing input perturbation frequency, the diあerence of phase between EVFT fail group and the controls widened. EVFT fail group reacted much more slowly response than the controls at a higher-level frequency, especially for 1.28 Hz (P=0.015). Accordingly, only for frequency at 2.19 Hz, EVFT fail group showed relatively significant decrease in amplitude of steering wheel (P=0.047). In addition, it showed no significant differences between both glaucoma groups and control group after adjustment for binocular IVF (P>0.05).
When we compared the correlation between the delay of control-response and visual field among all participants, phase was significantly associated with better-eye visual field (r=0.44,P=0.02) and IVF (r=0.52,P=0.004), without worseeye visual field (P>0.05). Therefore Figure 5 presents the correlation between phase and diあerent subregions of bettereye and IVF (central 10°, superior and inferior field). Phase was significantly associated with central 10° and inferior field, without superior field, and the highest correlation was inferior field of better-eye (r=0.51,P=0.004) and IVF (r=0.55,P=0.002).
DISCUSSION
In our study, glaucoma patients with binocular VFL suあered from a longer delay of response in driving simulation test. Moreover, inferior VFL was most relevant to this delay. Although some glaucoma patients stopped driving due to their diきculty in driving activities, a large number of subjects with very advanced VFL continued to drive in previous reports[17-18]. Nevertheless, there has never been any research on driving in glaucoma patients in China to date[19]. Our finding suggested that binocular VFL may put patients at higher driving risks, consistent to other studies[4-5]. However, all these patients continued to drive, thereby endangering themselves and others.The driving simulation test can provide a highly controlled and uniform environment for all participants and has been proven to predict on-road driving performance validly by a lot of studies[20-21]. Hence, Medeiroset al[22]proposed driving simulation as a tool for evaluating driving performance of glaucoma patients. This simulation test designed in this study mainly focused on lane-keeping, examining the drivers’ reaction speed and control amplitude of steering wheel when confronted with unpredictable external perturbation. When the screen displayed positions of a lateral deviation, drivers need to make proper emergency measures to response.
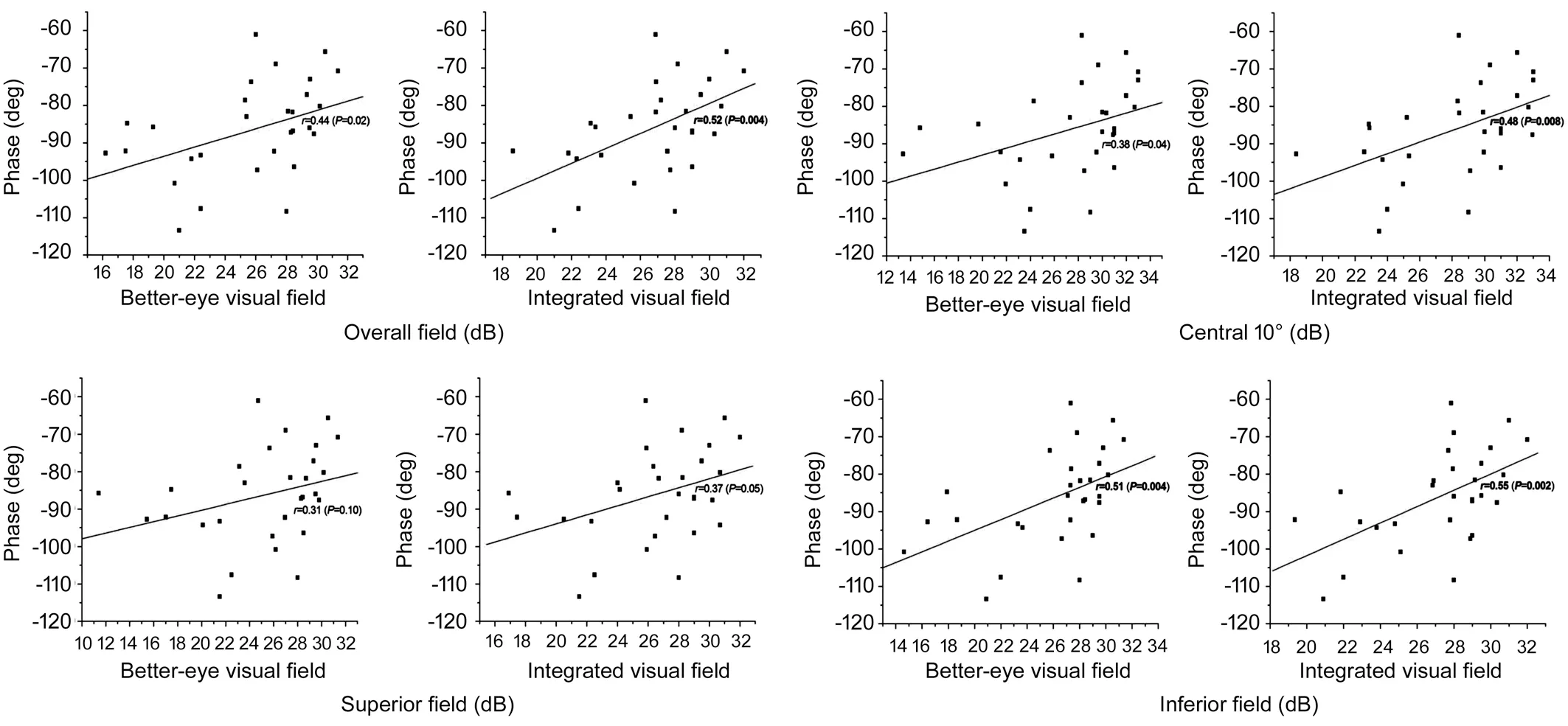
Figure 5 Correlation between phase and diあerent regions of better-eye and integrated visual field (overall, central 10°, superior and inferior field).
Patients with binocular VFL reacted more slowly than the controls in our lane-keeping task. Similar studies also demonstrated the delay of reaction to unexpected events in participants who have central VFL but not glaucoma[23-24]. These results suggested that binocular VFL may have impacts on delaying reaction time when the participants faced unpredictable vehicular lateral deviation. A recent study found drivers with glaucoma took longer to respond to the symbols in visual field test, compared to controls by a driving simualtor[25]. Our results indeed showed that this difference is mainly reflected in the increased diきculty of tasks, for example when the input perturbation frequency at a higher level. On the other hand, this delay of response was not significant after adjustment for VFL which means binocular VFL could be responsible for the increased driving risks.
There is still in debate regarding the location of VFL on driving performance. Some studies showed the greater importance in inferior field[3,26], while others showed the important role of superior field[2,27]. These conflicted results may be due to the methods of assessing driving performance, therefore the underlying causes for the impact of VFL are unclear. One possibility at least in our study, was that since inferior field provided event information immediately in front of the vehicle, it informed the driver about physical environment of the roadway that were the most relevant in terms of avoiding an unpredictable vehicular lateral deviation. Therefore, our results suggested VFL in this region might be highly detrimental to driving safety.
However, the differences of total performance error and control-response amplitude of steering wheel were not significant between patients with binocular VFL and the controls. It could be related to the difficulty of the task. Even binocular VFL participants could compensate for their VFL by increasing their visual exploration. Bronstadet al[28]showed similar negative results and attributed to adequate training and driving time as well. All of our participants were drivers currently and had adequate real driving experience, who received enough exercises before driving test. Moreover, Bronstadet al[28]also hypothesized that patients with central VFL did not have major problems in overall lane-keeping control due to the increased steering correction. Indeed, the more steering eあort they devoted to maintain adequate vehicle control, the less attention for other driving tasks such as hazard detection[23]. It was corresponding to the results of longer response time of binocular VFL drivers.
The findings of our study should be considered in terms of both its strengths and limitations. The main strength was that all participants were 30-40 years old current drivers with certain driving experience, representing most driving population in China better than previous studies. Despite difference compared with actual driving, our simulation test has the advantages of less space area, compact construction and simple operation, which is suitable for driving safety screening in a populous country like China. On the other hand, as a preliminary driving simulation test, different vehicle speeds and viewing behavior, such as head movement and eyescanning, were not considered. More individualized driving assessments, which will take into account the patients’ ability to compensate for their VFL, are needed in further driving simulation test.In summary, this is an original driving performance study on glaucoma patients in China. This lane-keeping task is eあective to help drivers with glaucoma understand the risky driving situations for them. Moreover, patients with binocular VFL may react more slowly so that they may not be able to make proper emergency measures of avoidance at the moment of encountering unknowable hazards. The information provides a first step towards counseling glaucoma patients in China to pay attention to their driving safety.
ACKNOWLEDGEMENTS
The samples used for the analyses described in this manuscript were obtained from the EENT Biobank. We would like to thank all participants and the staff for their valuable contribution to this research.
Foundations:Supported by State Key Program of National Natural Science Foundation of China (No.81430007); National Natural Science Foundation of China (No.81790641; No.81401533); Natural Science Foundation of Shanghai (No.18ZR1406000).
Conflicts of Interest: Jiang ZY,None;Chen J,None;Yao J,None;Qian SH,None.
 International Journal of Ophthalmology2021年1期
International Journal of Ophthalmology2021年1期
- International Journal of Ophthalmology的其它文章
- Response of L V Prasad Eye Institute to COVID-19 outbreak in India: experience at its tertiary eye care centre and adoption to its Eye Health Pyramid
- Preliminary studies of constructing a tissue-engineered lamellar corneal graft by culturing mesenchymal stem cells onto decellularized corneal matrix
- Therapeutic potential of Rho-associated kinase inhibitor Y27632 in corneal endothelial dysfunction: an in vitro and in vivo study
- Changes of matrix metalloproteinases in the stroma after corneal cross-linking in rabbits
- A multi-omics study on cutaneous and uveal melanoma
- Eあects of quercetin on diabetic retinopathy and its association with NLRP3 inflammasome and autophagy