
四旋翼无人机飞控系统设计与实现
2021-01-16 02:53胡徐胜郑睿陶彬彬
廊坊师范学院学报(自然科学版) 2021年4期
胡徐胜 郑睿 陶彬彬
【摘要】为了提升四旋翼无人机的飞行控制效果,采用PID控制算法和PWM控制对无人机的飞行进行控制。通过对无人机飞行运动状态的研究,对无人机进行数学建模。引进了PID控制算法和PWM控制,并设计实验验证了算法的稳定性和良好效果。无人机的飞行控制一般通过避障来验证,避障实验证明,该算法避障效果好、鲁棒性强。
【关键词】无人机;四旋翼;避障;PWM
〔中图分类号〕TP273 〔文献标识码〕A 〔文章编号〕1674-3229(2021)04-0046一05
0 引言
随着通信技术、遥控技术以及智能控制技术的发展,无人机的应用领域越来越广泛,而对无人机的控制系统也提出了越来越高的要求。四旋翼无人机与普通固定翼无人机不同,关闭电源后,四旋翼无人机将失去动力成自由落体下落,并进行滑行式飞行[1]。四旋翼无人机由四台电动机控制,其可控性较固定翼无人机更高,可以实现快速垂直起降、定点控制等特殊功能。
1 四旋翼无人机运动状态
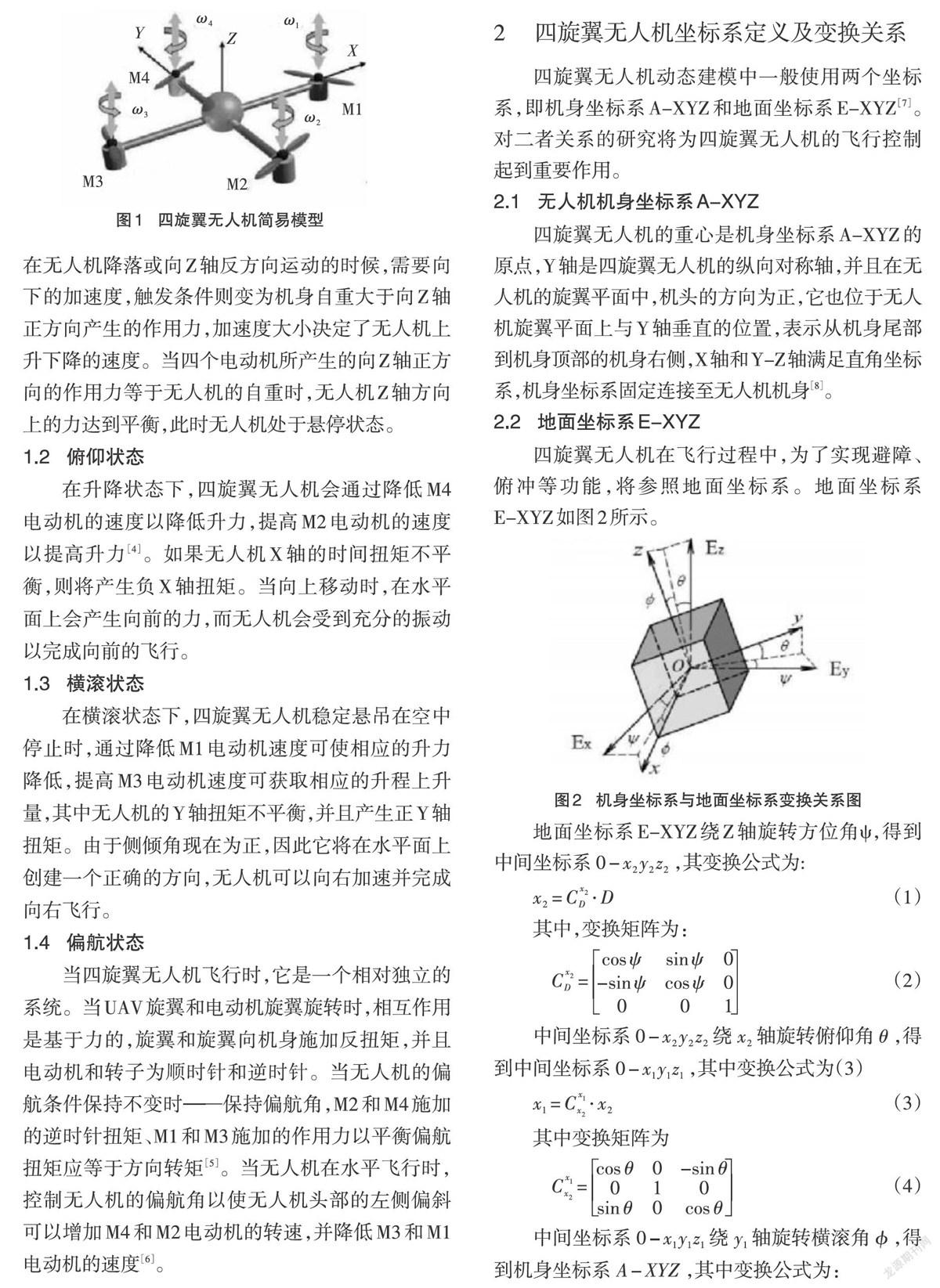
四旋翼无人机简易模型如图1所示。X、Y、Z轴为三维空间坐标,通过调整四个电动机的速度变化来控制四旋翼无人机的各种飞行姿态、速度和动作[2]。
1.1 升降状态
无人机起飞的条件是有向上的加速度,触发条件则是无人机向Z轴产生的作用力大于无人机自重[3]。
图1 四旋翼无人机简易模型在无人机降落或向Z轴反方向运动的时候,需要向下的加速度,触发条件则变为机身自重大于向Z轴正方向产生的作用力,加速度大小决定了无人机上升下降的速度。当四个电动机所产生的向Z轴正方向的作用力等于无人机的自重时,无人机Z轴方向上的力达到平衡,此时无人机处于悬停状态。
1.2 俯仰状态
在升降状态下,四旋翼无人机会通过降低M4电动机的速度以降低升力,提高M2电动机的速度以提高升力[4]。如果无人机X轴的时间扭矩不平衡,则将产生负X轴扭矩。当向上移动时,在水平面上会产生向前的力,而无人机会受到充分的振动以完成向前的飞行。
1.3 横滚状态
在横滚状态下,四旋翼无人机稳定悬吊在空中停止时,通过降低M1电动机速度可使相应的升力降低,提高M3电动机速度可获取相应的升程上升量,其中无人机的Y轴扭矩不平衡,并且产生正Y轴扭矩。由于侧倾角现在为正,因此它将在水平面上创建一个正确的方向,无人机可以向右加速并完成向右飞行。
1.4 偏航状态
当四旋翼无人机飞行时,它是一个相对独立的系统。当UAV旋翼和电动机旋翼旋转时,相互作用是基于力的,旋翼和旋翼向机身施加反扭矩,并且电动机和转子为顺时针和逆时针。当无人机的偏航条件保持不变时—保持偏航角,M2和M4施加的逆时针扭矩、M1和M3施加的作用力以平衡偏航扭矩应等于方向转矩[5]。当无人机在水平飞行时,控制无人机的偏航角以使无人机头部的左侧偏斜可以增加M4和M2电动机的转速,并降低M3和M1电动机的速度[6]。
2 四旋翼无人机坐标系定义及变换关系
四旋翼无人机动态建模中一般使用两个坐标系,即机身坐标系A-XYZ和地面坐标系E-XYZ[7]。对二者关系的研究将为四旋翼无人机的飞行控制起到重要作用。
2.1 无人机机身坐标系A-XYZ
四旋翼无人机的重心是机身坐标系A-XYZ的原点,Y轴是四旋翼无人机的纵向对称轴,并且在无人机的旋翼平面中,机头的方向为正,它也位于无人机旋翼平面上与Y轴垂直的位置,表示从机身尾部到机身顶部的机身右侧,X轴和Y-Z轴满足直角坐标系,机身坐标系固定连接至无人机机身[8]。
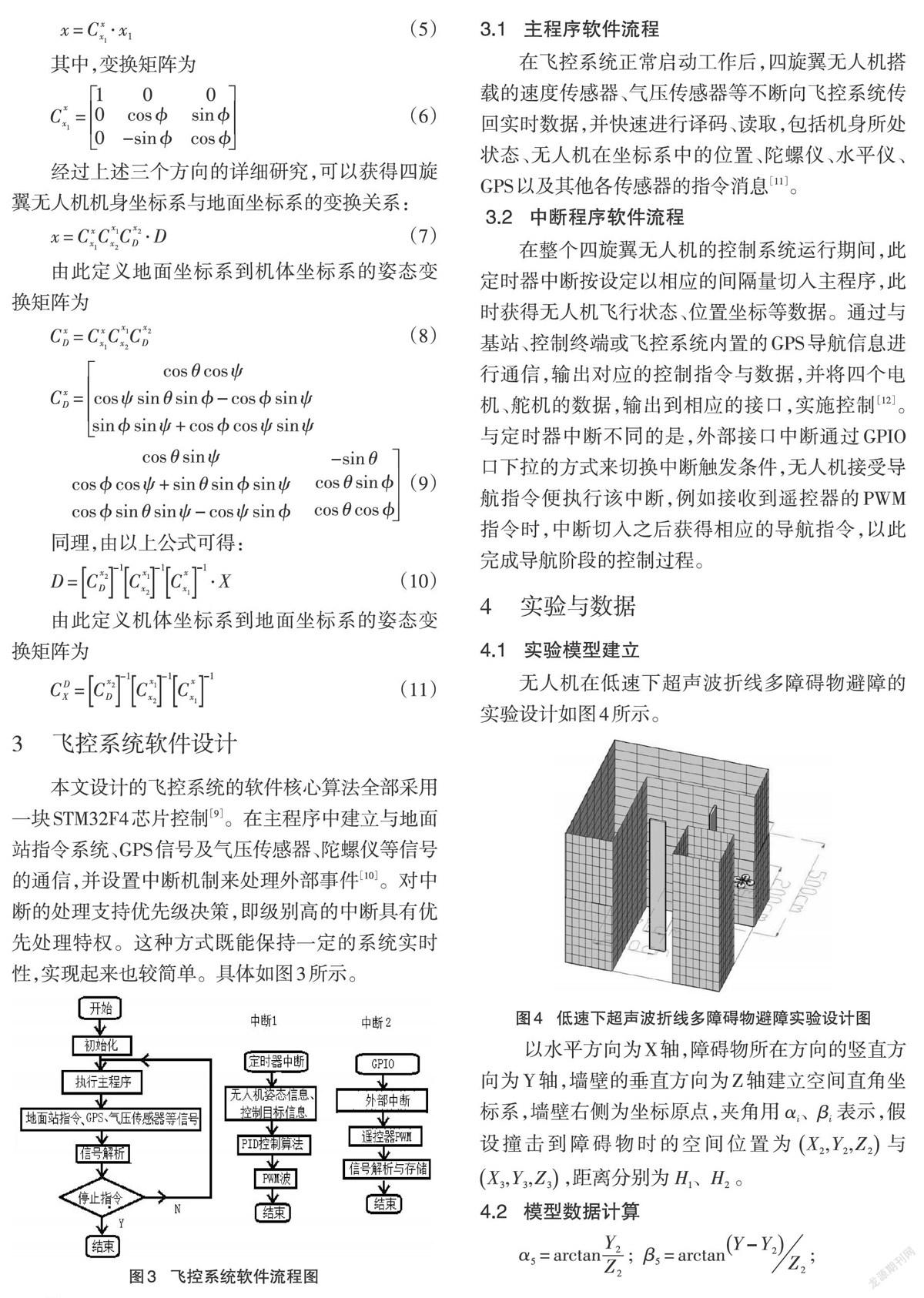
2.2 地面坐标系E-XYZ
四旋翼无人机在飞行过程中,为了实现避障、俯冲等功能,将参照地面坐标系。地面坐标系E-XYZ如图2所示。
地面坐标系E-XYZ绕Z轴旋转方位角Ψ,得到中间坐标系0-x2y2z2,其变换公式为:
x2=CDx2·D(1)
其中,变换矩阵为:
中间坐标系0-x2y2z2绕x2轴旋转俯仰角θ,得到中间坐标系0-x1y1z1,其中变换公式为(3)
中间坐标系0-x1y1z1绕y1轴旋转横滚角φ,得到机身坐标系A-XYZ,其中变换公式为:
经过上述三个方向的详细研究,可以获得四旋翼无人机机身坐标系与地面坐标系的变换关系:
由此定义地面坐标系到机体坐标系的姿态变换矩阵为
由此定义机体坐标系到地面坐标系的姿态变换矩阵为
3 飞控系统软件设计
本文设计的飞控系统的软件核心算法全部采用一块STM32F4芯片控制[9]。在主程序中建立与地面站指令系统、GPS信号及气压传感器、陀螺仪等信号的通信,并設置中断机制来处理外部事件[10]。对中断的处理支持优先级决策,即级别高的中断具有优先处理特权。这种方式既能保持一定的系统实时性,实现起来也较简单。具体如图3所示。
3.1 主程序软件流程
在飞控系统正常启动工作后,四旋翼无人机搭载的速度传感器、气压传感器等不断向飞控系统传回实时数据,并快速进行译码、读取,包括机身所处状态、无人机在坐标系中的位置、陀螺仪、水平仪、GPS以及其他各传感器的指令消息[11]。
3.2 中断程序软件流程
在整个四旋翼无人机的控制系统运行期间,此定时器中断按设定以相应的间隔量切入主程序,此时获得无人机飞行状态、位置坐标等数据。通过与基站、控制终端或飞控系统内置的GPS导航信息进行通信,输出对应的控制指令与数据,并将四个电机、舵机的数据,输出到相应的接口,实施控制[12]。与定时器中断不同的是,外部接口中断通过GPIO口下拉的方式来切换中断触发条件,无人机接受导航指令便执行该中断,例如接收到遥控器的PWM指令时,中断切入之后获得相应的导航指令,以此完成导航阶段的控制过程。
4 实验与数据
4.1 实验模型建立
无人机在低速下超声波折线多障碍物避障的实验设计如图4所示。
以水平方向为X轴,障碍物所在方向的竖直方向为Y轴,墙壁的垂直方向为Z轴建立空间直角坐标系,墙壁右侧为坐标原点,夹角用αi、βi表示,假设撞击到障碍物时的空间位置为(X2,Y2,Z2)与(X3,Y3,Z3),距离分别为H1、H2。
4.2 模型数据计算
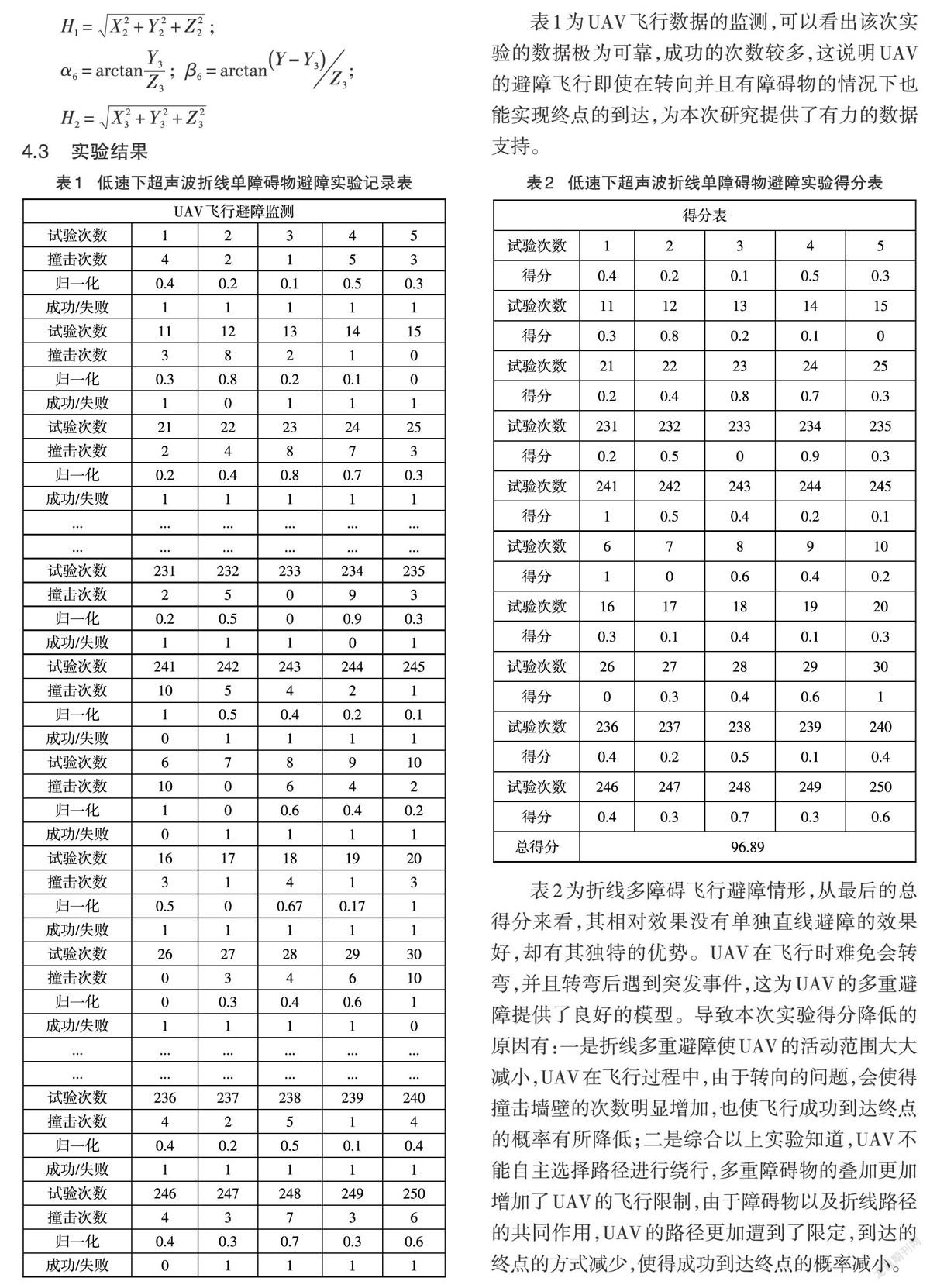
4.3 实验结果
表1为UAV飞行数据的监测,可以看出该次实验的数据极为可靠,成功的次数较多,这说明UAV的避障飞行即使在转向并且有障碍物的情况下也能实现终点的到达,为本次研究提供了有力的数据支持。
表2为折线多障碍飞行避障情形,从最后的总得分来看,其相对效果没有单独直线避障的效果好,却有其独特的优势。UAV在飞行时难免会转弯,并且转弯后遇到突发事件,这为UAV的多重避障提供了良好的模型。导致本次实验得分降低的原因有:一是折线多重避障使UAV的活动范围大大减小,UAV在飞行过程中,由于转向的问题,会使得撞击墙壁的次数明显增加,也使飞行成功到达终点的概率有所降低;二是综合以上实验知道,UAV不能自主选择路径进行绕行,多重障碍物的叠加更加增加了UAV的飞行限制,由于障碍物以及折线路径的共同作用,UAV的路径更加遭到了限定,到达的终点的方式减少,使得成功到达终点的概率减小。
5 结论
本文通过对四旋翼无人机飞行运动状态的研究,对无人机进行数学建模,引进了经典的PID控制算法和PWM控制,并设计避障实验验证算法的稳定性和良好效果。结果表明,该算法避障效果好,验证了设计的有效性和稳定性。
[参考文献]
[1]韩敏,闫阔,秦国帅.基于改进KAZE的无人机航拍图像拼接算法[J].自动化学报,2019,45(2):70-74.
[2]史豪斌,徐梦,刘珈妤,等.一种基于Dyna-Q学习的旋翼无人机视觉伺服智能控制方法[J].控制与决策,2018,46(11):335-337.
[3]胡徐胜,刘娟一种带多路选择的智能循迹小车优化设计[J].控制工程,2020,27(7):1131-1135.
[4]王杰,张永辉,李宪鹏.无人机组合导航系统姿态控制方法仿真[J].计算机仿真,2019,36(6):73-76+82.
[5]余亮,韩芳,王鹏,等.局部闭链码垛机器人运动学分析及运动控制系统设计[J].廊坊师范学院学报(自然科学版),2020,20(2):46-49+54.
[6]陈章宝,侯勇.網球检球机器人视觉导航系统设计[J].廊坊师范学院学报(自然科学版),2020,20(2):42-45.
[7]Wu Yu,Gou Jinzhan,Hu Xinting,et al.A new consensustheory-based method for formation control and obstacleavoidance of UAVs[J].Aerospace Science and Technology,2020,107(Dec.):106332.1-106332.18.
[8]Shiqi Li,Shuai Zhang,Yan Fu,et al.Task-based obstacleavoidance for uncertain targets based on semantic object ma-trix[J]Control Engineering Practice,2020(105):134-137.
[9]Binrong Wen,Xinliang Tian,Xingjian Dong,et al.Designapproaches of performance-scaled rotor for wave basin mod-el tests of floating wind turbines[J].Renewable Energy,2020,148(Apr.):573-584.
[10] Shrishti P,Pandey,Prabhat K.Singh Basic Orange 21:Amolecular rotor probe for fluorescence turn-on sensing ofamyloid fibrils[J].Journal of Molecular Liquids,2020(303):112618.
[11]Lijun Song,Hongwei Zhang,Yuhong Liu,et al.Researchon negative-buoyancy autorotating-rotor autonomous un-derwater vehicles[J].Applied Ocean Research,2020(99):102123.
[12]Fanjing Huang,Panlong Wu,Xingxiu Li.DistributedFlocking Control of Quad-rotor UAVs with ObstacleAvoidance Under the Parallel-triggered Scheme[J].Inter-national Journal of Control,Automation and Systems,2021,19(3):1375-1383.
[收稿日期]2021-05-18
[基金项目]安徽高校自然科学研究重点项目(KJ2019A1275);安徽省智能机器人信息融合与控制工程实验室资助项目(IFCIR2020003)
[作者简介]胡徐胜(1982-),男,硕士,皖江工学院电气信息工程学院副教授,研究方向:电气自动化、智能控制。
猜你喜欢
中国新技术新产品(2017年2期)2017-01-20
科技创新与应用(2016年34期)2016-12-23
电子技术与软件工程(2016年20期)2016-12-21
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
电脑知识与技术(2016年17期)2016-07-23
