船体状态对电流补偿式电场隐身控制参量的影响
2021-01-16 05:18:18姜润翔程锦房
水下无人系统学报 2020年6期
孙 强, 姜润翔, 喻 鹏, 程锦房
船体状态对电流补偿式电场隐身控制参量的影响
孙 强1, 姜润翔2, 喻 鹏1, 程锦房1
(1. 海军工程大学 兵器工程学院, 湖北 武汉, 430033; 2. 海军工程大学 电气工程学院, 湖北 武汉, 430033)

舰船电场; 电流补偿; 隐身; 控制参量
0 引言
降低舰船水下电场信号对提升舰船综合隐身性能具有重要意义][[1-3], 目前, 针对静电场隐身, 除改进结构工艺[4]等基本方法外, 主要有阴极保护优化[5-7]和电流补偿技术[8-10]2种方式。

1 电流补偿基本原理
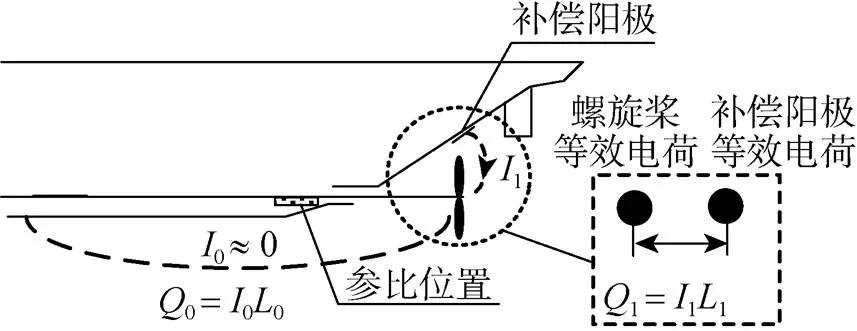
图1 电流补偿基本原理


2 涂层老化和破损对控制参量的影响
2.1 涂层老化影响
利用边界元软件, 对一艘中型舰船(如图2所示)分别在船体涂层破损率为2%、4%、6%和8%条件下的最佳补偿电流进行了仿真计算, 每种状态条件下以水下1.0(代表舰船型宽)平面的电场峰峰值最小为目标, 对补偿阳极输出电流进行了优化, 不同涂层破损率条件下的轴电流、补偿电流及水下电场值峰峰值如表1所示。表中的自腐蚀代表不进行电流补偿, 船体处于自然腐蚀状态;U-p代表水下电位峰峰值, 而||-p代表水下电场模值的峰峰值, 这2个参量均是评估电场隐身性能的重要指标。

图2 船体结构示意图
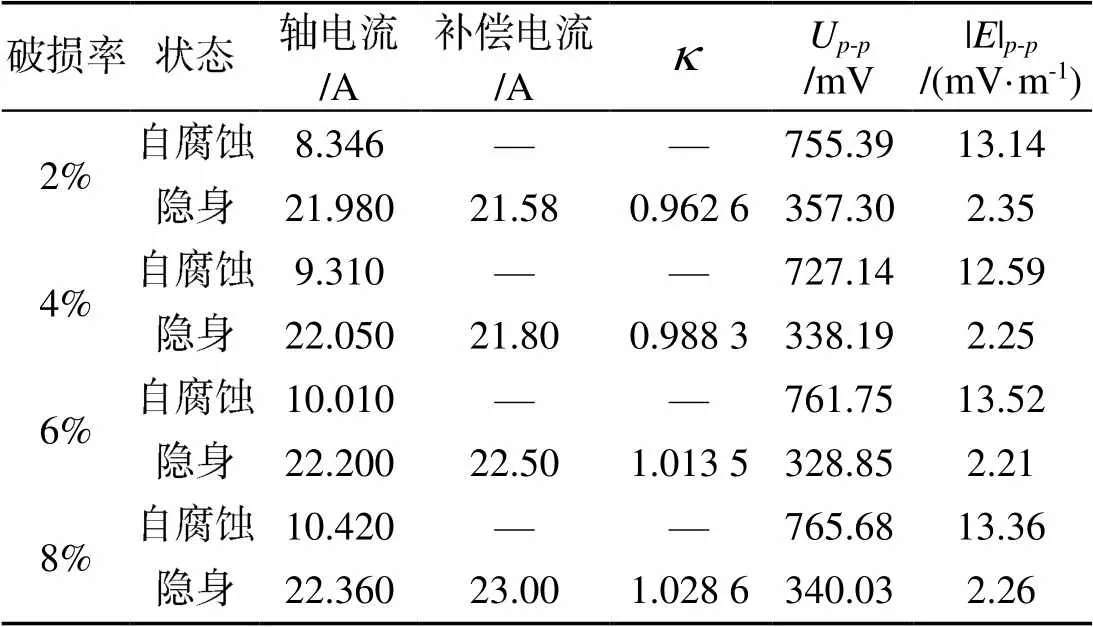
表1 不同涂层破损率条件下电场值、轴电流和最佳补偿电流值
2.2 涂层局部破损影响
电阻率保持不变。每种状态条件下, 基于边界元优化算法对补偿阳极的输出电流进行优化, 目标依然是使1.0平面的电场值最小。表2为不同船体位置极化电阻率变化时, 自然腐蚀与隐身状态下的轴电流、最佳补偿电流及水下电场值。
由表2可以看出:
1) 船体涂层破损会导致轴电流增大, 且破损位置越靠近螺旋桨, 轴电流增加越明显, 这是由于腐蚀回路电阻减小的缘故;
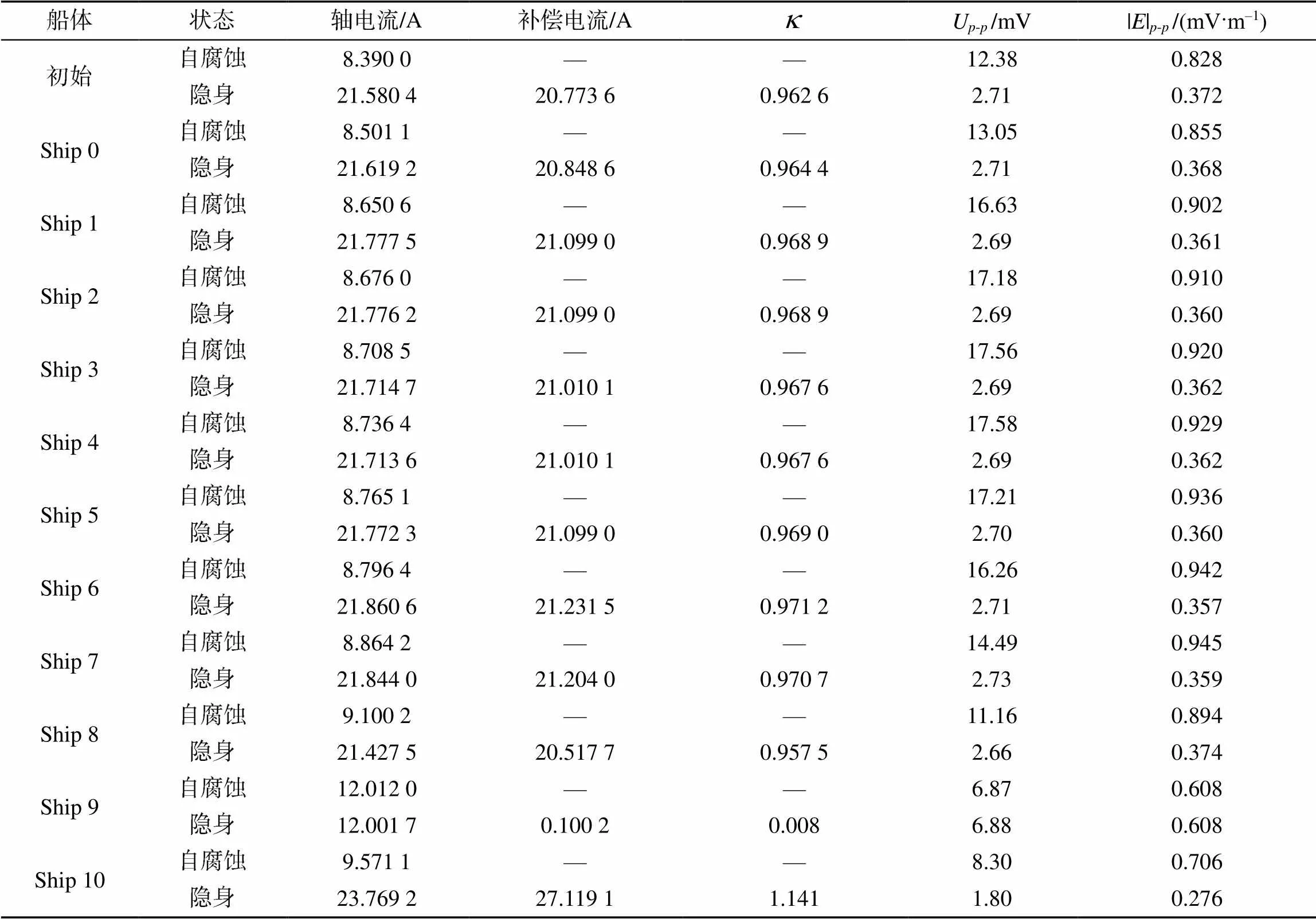
表2 不同位置极化电阻率变化时电场值、轴电流和最佳补偿电流值
2) 船体涂层破损时(Ship 9位置的涂层破损除外), 通过在尾部安装补偿阳极(即隐身状态), 均可实现对电场信号的有效降低, 以电位峰峰值作为评价准则, 电场抑制效果在75%~85%之间波动; 而Ship 9位置的涂层破损时, 之所以不能有效实现电场隐身, 主要是因为在该种状态下, 自然腐蚀时的等效电偶极矩已经接近该状态下等效电偶极矩的最小值;
3 螺旋桨转速对控制参量的影响
在实验室条件下进行1:50缩比船模试验, 试验前先对材料的自然腐蚀电位进行了测量, 其自然腐蚀电位最终稳定在–0.69 V。在船体尾部增加了一块与船体材料一致的材料A, 并利用液体密封胶将材料与船体粘结在一起(与船壳电绝缘), 然后通过一根导线与轴接地装置相连接。利用无接触电流传感器测量轴电流和材料A上的电流, 同时在材料的表面放置有参比电极B, 也便于实时监测材料A表面的电位, 补偿阳极C安装于螺旋桨正上方, 如图3所示。
参比电极B、船壳和补偿阳极C分别与电化学工作站的参比电极RE、工作电极WE和辅助电极的CE连接, 调整辅助阳极的输出电流, 实时监测船模龙骨正下方20 cm处正横0 cm的电位信号。利用电化学工作站动态电流扫描输出, 电流的变化率为0.005 mA/s, 设定螺旋桨转速分别为150 r/min、200 r/min和300 r/min。表3~表5为对应测量结果, 其中黑色加粗代表最佳隐身状态。由于篇幅限制, 这里只列出部分数据, 但是仍能够表征船体表面电位和电流等随补偿电流变化的趋势。
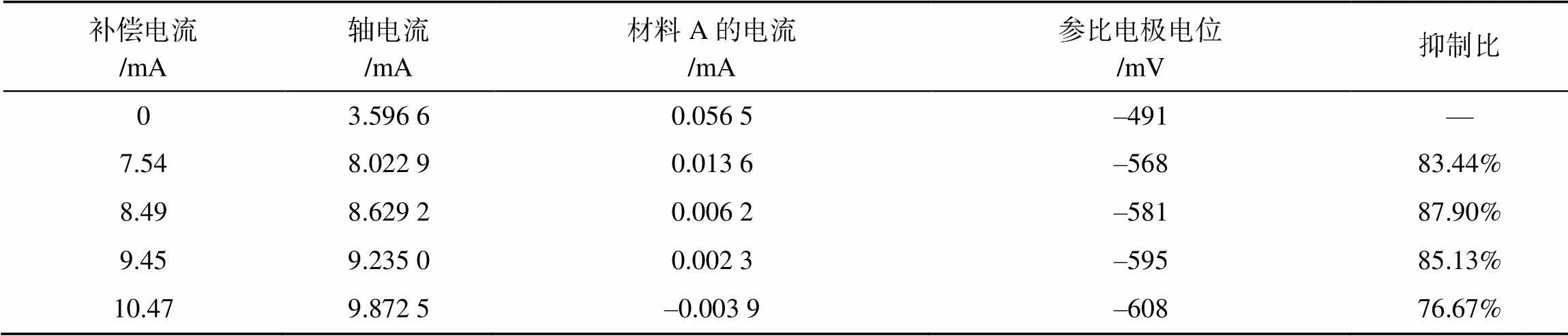
表3 螺旋桨转速为150 r/min的测试结果

表4 螺旋桨转速为200 r/min的测试结果
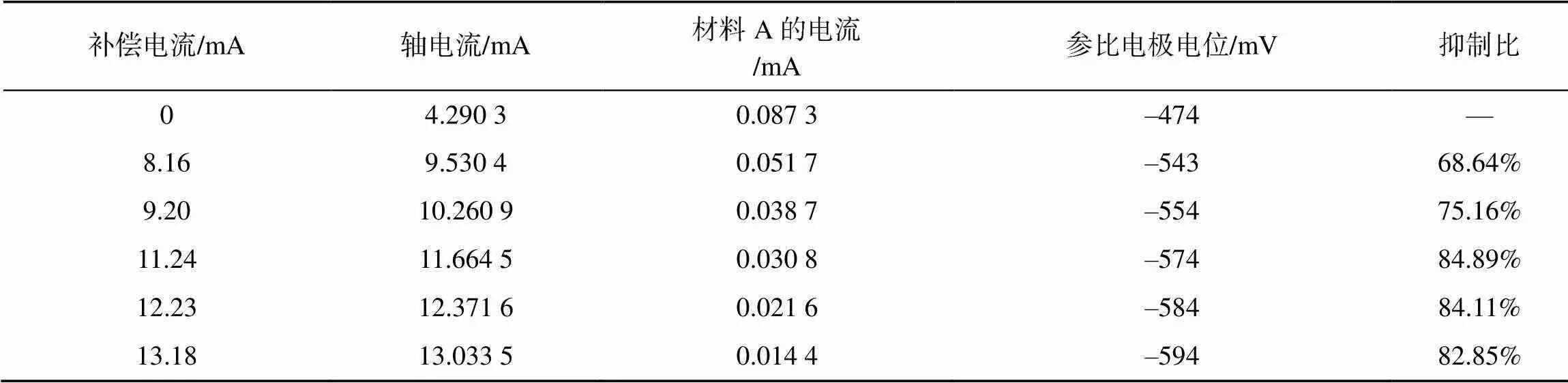
表5 螺旋桨转速为300 r/min的测试结果
由表3~表5可发现:
1) 随着补偿电流的增大, 轴电流逐渐增大, 材料A表面电流由正值逐渐向负值变化, 即材料A由阳极逐渐向阴极转化, 电场的抑制比先增大后减小;
2) 当材料A表面电流的绝对值接近于零时, 不同螺旋桨转速条件下电场的抑制是不一致的, 螺旋桨转速越低, 其抑制比越大, 而随着螺旋桨转速的提高, 其抑制比的效果也逐渐变差, 这主要是由于材料A的位置是依据静态条件下的极化曲线优化计算得到的结果, 随着螺旋桨转速的提高, 氧的去极化反应逐渐增强, 螺旋桨极化电阻的变化引起局部电化学状态变化较大, 静态条件下优化的结果已不适用于螺旋桨转动时的结果, 此结论表明, 在选取材料A的位置时, 应依据螺旋桨转动时的极化曲线进行优化计算;
3) 不同螺旋桨转速条件下, 自然腐蚀状态下参比电极的电位值和自然腐蚀时的电流值是不一样的, 且随着螺旋桨转速的提高, 参比电极的电位逐渐向正方向移动, 自然腐蚀电流值逐渐变大, 这也是由于螺旋桨转速提高时, 氧的去极化作用增强、螺旋桨极化电阻减小引起的;
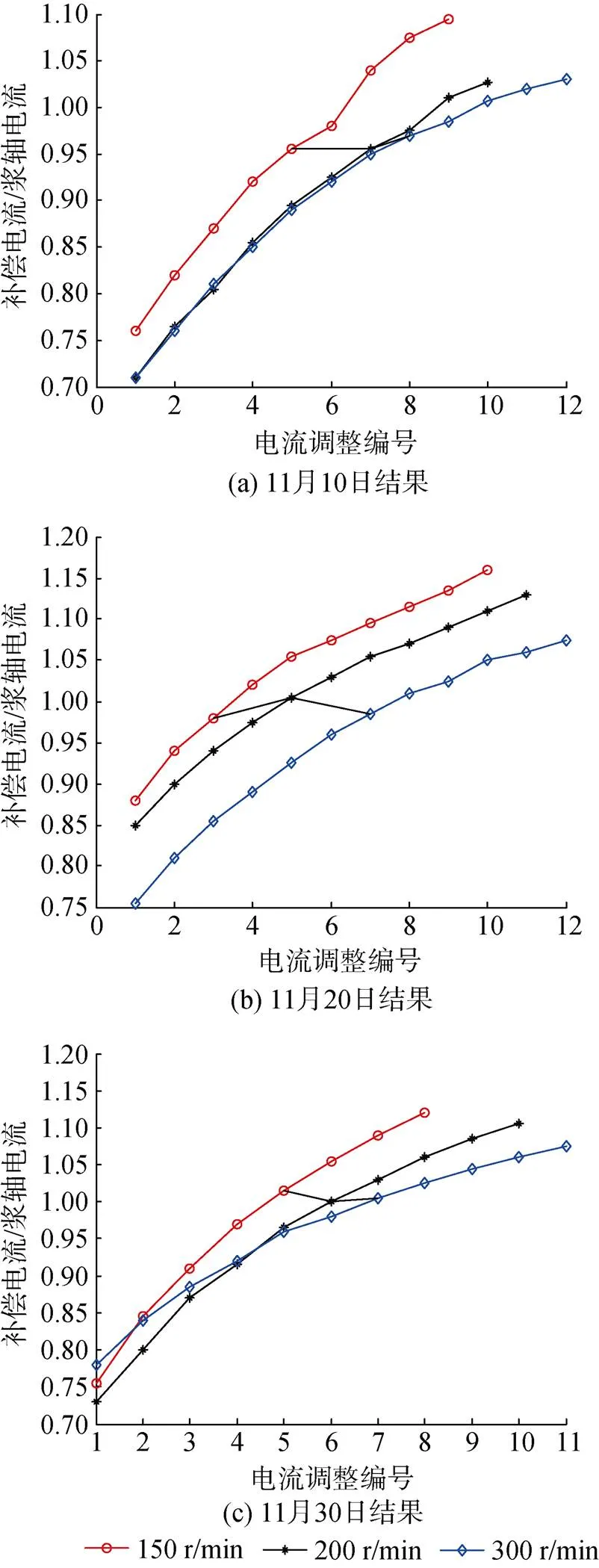
图4 连续3次缩比模型试验结果
4 结束语
[1] Hubbard J C, Brooks S H, Torrrance B C. Practical Measures for Reduction and Management of the Electro-magnetic Signatures of in-Service Surface Ships and Submarines[C]//Underwater Defence Technology Conference, London: [S.l.], 1996: 64-65.
[2] Rodrigo F J, Beatriz M D, Antonio S. Underwater Threats Detection Based on Electric Field Influences[C]//UDT 2010, Hamburg(Germany): Undersea Defence Technology Conference & Exhibition, 2010: 8-10.
[3] 牟兰. 国外舰船电场特性研究及其在水雷战上的应用[J]. 舰船科学技术, 2012, 34(9): 138-142.
Mou Lan. The Characteristic Research of Foreign Warship’s Electric Field and Its Application on Mine Warfare[J]. Ship Science and Technology, 2012, 34(9): 138-142.
[4] 喻鹏, 姜润翔, 程锦房. 减少舰船静电场的隔离电阻估算方法研究[J]. 舰船科学技术, 2018, 40(15): 123-127. Yu Peng, Jiang Run-xiang, Cheng Jin-fang. The Study on Evaluation Method for the Least Isolation Resistance which Decreases the Corrosion Related Static Electric Field[J]. Ship Science and Technology, 2018, 40(8): 123-127.
[5] Xing S H, Li Y, Song H Q, et al.Optimizing the Quantity,Locations and Output Currents of Anodes to Improve Cathodic Protection Effect of Semi-Submersible Crane Vessel[J]. Ocean Engineering, 2016,113:144-150.
[6] Kim Y S, Lee S K, Kim J G. Influence of Anode Location and Quantity for the Reduction of Underwater Electric Fields under Cathodic Protection[J]. Ocean Engineering, 2018, 163: 476-482.
[7] 吴建华.水下船体阴极保护与腐蚀电磁场优化控制研究[D].大连: 大连理工大学, 2012.
[8] 秦一平, 姜润翔, 程锦房, 等. 基于外加电流补偿的舰船静电场抑制方法[J]. 水雷战与舰船防护, 2016, 24(1): 14-18. Qing Yi-ping, Jiang Run-xiang, Cheng Jin-fang, et al. Ship’s Static Electric Field Reduction Method Based on Impressed Current Compensation[J]. Mine Warfare & Ship Self-Defence, 2016, 24(1): 14-18.
[9] 喻鹏. 舰船静电场隐身技术研究[D]. 武汉: 海军工程大学, 2017.
[10] 孙强, 姜润翔, 喻鹏, 等. 轴频电场与静电场一体化腐蚀相关电场隐身方法研究[J]. 兵工学报, 2020, 41(4): 730-736.Sun Qiang, Jiang Run-xiang, Yu Peng, et al. Integrative Stealth Method of Corrosion-related Static and Shaft Rate Electric Fields[J]. Acta Armamentarii, 2020, 41(4): 730- 736.
[11] Yu P, Cheng J F, Jiang R X. Research of Ship’s Stealth Methods in Static Electric Field[J]. Advances in Materials, Machinery, Electrical Engineering, 2017, 114: 137-144.
[12] 林春生, 龚沈光. 舰船物理场[M]. 第2版. 北京: 兵器工业出版社, 2007.
[13] 姬庆, 蒋培. 舰船轴频电场中接触电阻研究[J]. 四川兵工学报, 2014, 35(8): 127-130. Ji Qing, Jiang Pei. Contact Resistance in Shaft frequency Electric Field[J]. Journal of Sichuan Military Engineering, 2014, 35(8): 127-130.
[14] 贾铮, 戴长松, 陈玲.电化学测量方法[M].北京: 化学工业出版社, 2015.
Effects of Hull States on the Control Parameter of the Current Compensation Electric Field Stealth
SUN Qiang1, JIANG Run-xiang2, YU Peng1, CHENG Jin-fang1
(1. College of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China; 2. College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China)

ship electric field;current compensation; stealth; control parameter
孙强, 姜润翔, 喻鹏, 等. 船体状态对电流补偿式电场隐身控制参量的影响[J]. 水下无人系统学报, 2020, 28(6): 657-662.
U663.2; O441.4
A
2096-3920(2020)06-0657-06
10.11993/j.issn.2096-3920.2020.06.010
2020-07-03;
2020-08-15.
国家自然科学基金(51509252); 青岛国家海洋实验室项目资助(2017WHZZB0202).
孙 强(1982-), 男, 在读博士, 讲师, 主要研究方向为军用目标特性及信息感知技术.
(责任编辑: 许 妍)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
舰船科学技术(2022年20期)2022-11-28 08:19:52
舰船科学技术(2021年12期)2021-03-29 01:28:44
航空发动机(2020年3期)2020-07-24 09:03:16
舰船科学技术(2016年1期)2016-02-27 15:39:26
焊接(2015年9期)2015-07-18 11:03:51
海军医学杂志(2015年2期)2015-02-27 13:47:42
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年6期)2014-05-14 06:45:17
中国舰船研究(2014年1期)2014-05-14 06:40:47