
一种降低无刷直流电机非导通相续流的PWM调制方式研究
2021-01-15 05:29:50寇元超郗珂庆王志业龚晓宏
微电机 2020年12期
寇元超,郗珂庆,王志业,龚晓宏
(西安航天动力测控技术研究所,西安 710025)
0 引 言
无刷直流电机(Brushless DC Motor,BLDCM)由于其功率密度大、效率高以及控制性能好等优点,现已被广泛应用于仪器仪表、家用家电和航空航天等领域。但转矩波动的存在是直流无刷电机的固有缺点,其会导致电机转速波动加剧,并使平均转矩显著下降。其产生原因主要可以分为电机设计和控制方式两部分。电机设计主要包含电磁因素、齿槽转矩、机械工艺等引起的转矩波动;控制方式主要包括换相转矩 波动和非换相转矩波动[1]。
文献[2-4]分析了换相转矩波动的产生原因并给出了不同的解决方法。文献[5]分析了五种PWM调制方式对换相时刻转矩波动的影响,并提出PWM-ON调制时换相转矩波动最小,但是没有研究这些调制方式对非换相相的影响。理论上认为非导通相没有电流流过,不会造成转矩波动。然而电机在实际工作过程中会进行PWM调制,当逆变器的开关管处于“OFF”时,在某些时刻会造成非导通相反并联二极管正向导通,从而在非导通相产生波动电流,该电流会对电磁转矩产生影响,从而造成一部分转矩波动,降低电机的输出功率。文献[1,6]从理论分析了非换相时不同PWM调制产生续流的原因,但是没有分析不同的调制方式对非换相期间转矩波动的影响。
本文基于以上分析,采用PWM-ON-PWM调制方式(三相逆变器上、下桥臂开关管均参与调制,且每个开关管在导通期间,前30°和后30°进行PWM调制,中间60°保持恒通),这种调制方式能够完全消除非换相期间非导通相反并联二极管的续流,从而减小转矩波动。以H_PWM-L_ON为例(开关管上桥臂PWM调制,下桥臂常开),从理论上分析非导通相续流产生的原因。以某型号电机为研究对象,采用Simulink仿真比较两种调制方式下的相电流波形、转矩波形图,并搭建实验验证平台,验证该方法在消除非导通相续流中的有效性。
1 PWM调制对非导通相电流影响
以两相导通星形三相六状态为例分析无刷直流电机数学模型,其等效电路如图1:
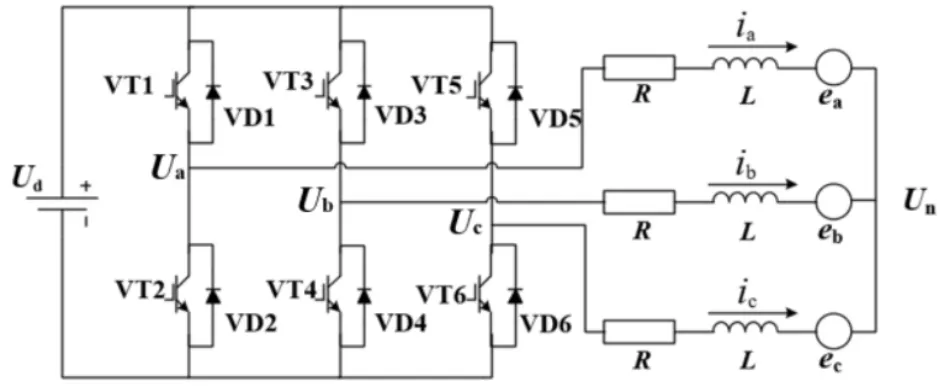
图1 等效电路图
假设电机三相绕组完全对称,反电动势为平顶宽度为120°的理想梯形波,定子齿槽的影响忽略不计,电压平衡方程可表示为
(1)
电磁转矩方程为
(2)
式中,Ua,Ub,Uc为三相绕组输出端对直流电源地电压,ia,ib,ic为三相定子电流,图1中箭头所示方向规定为正方向,ea,eb,ec为三相反电动势,R,L分别表示每相绕组的电阻和电感(本文为每相绕组自感与互感差值),Un为电机中性点对电源地电压,ω为电机角速度。
在理想状态下,电机工作过程中,每一时刻有两相绕组导通,有电流流过,另一相绕组不导通没有电流流过。实际工作中,当非导通相的端电压高于直流母线电压或者低于直流母线地电平时,反并联二极管导通,使得非导通相有电流流过,根据式(2)可知此电流会参与电磁转矩的合成,从而造成了转矩波动。接下来以A、C相导通,B相关断为例,分析PWM调制时非导通相续流的产生原因。
1.1 H_PWM-L_ON
H_PWM-L_ON调制方式如图2所示。

图2 H_PWM-L_ON调制方式
在[π/3,2π/3]区间,A正向导通,C反相导通,开关管VT1进行PWM调制,VT6恒通。当PWM信号为“ON”时,电流流向如图3(a)所示,根据电压平衡方程式(1)可列出如下方程:
(3)
由于ia=-ic=Im,ea=-ec=E,得
(4)
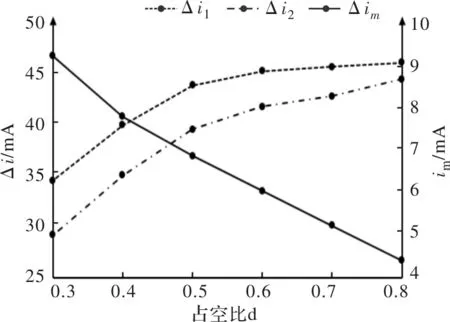
电机工作过程中反电动势E 当PWM信号为“OFF”时,VT1关断,A相电流经过反并联二极管VD2续流,此时Ua=0,理想情况下不考虑非导通相续流时的电流流向如图3(b)所示。 (5) 在[π/3,2π/3]区间,eb在-E和E之间变化。 (1)当eb<0时([π/3,π/2]区间),如图4,B端电压满足Ub 图3 H_PWM-L_ON调制时A+C-拍的电流流向 (2)当eb>0时([π/2,2π/3]区间),B相端电压满足0 同理可推导出在[4π/3,5π/3]区间,B相续流发生在[π/2,5π/3]。由此可得,在A、C相导通的情况下,非导通相B相续流情况如图4中画圈部分所示: 图4 理想情况下非导通相反电动势和电流波形图 PWM-ON-PWM调制方式如图5所示。 图5 PWM-ON-PWM调制方式 (1)在[π/3,π/2]区间,VT1恒通,VT6进行PWM调制。当PWM信号为“ON”时,没有续流发生,电流流向如图6(a)所示,具体分析可参考上节。当PWM信号为“OFF”时,VT6关断,C相电流经过反并联二极管VD5续流,根据式(3)、式(4)可知。 (6) 由于-E 图6 PWM-ON-PWM调制时A+C-拍的电流流向 (2)在[π/2,2π/3]区间, VT1进行PWM调制,VT6恒通。分析情况同1.1节中相同区间分析情况一致,没有续流产生。同理可得,在[4π/3,5π/3]区间内,非导通相B相也不发生续流。 综合1.1节和1.2节分析,可发现使用PWM-ON-PWM调制方式理论上可以完全消除由于PWM调制引起的非导通相续流。 为了验证以上分析结果,在Simulink平台中建立无刷直流电机控制系统模型进行仿真验证。所用电机参数及仿真参数见表1。 表1 电机参数 本文对上节分析的两种调制方式分别进行仿真验证。其中,为了得到30°换相信号,本文采用霍尔信号与反电动势信号相结合的方式,霍尔信号决定开关管导通次序,反电动势信号决定恒通或PWM调制。 图7和图8分别是占空比为0.8、施加0.1 Nm负载时两种调制方式下的非导通相相电流、输出转矩仿真波形。从图7(a)中可以看出,非导通相二极管会发生续流,且续流过程发生在[π/3,π/2]和[3π/2,5π/3]区间(图中画圈部分);而图(b)中没有续流现象。这与第1.1和1.2节中理论分析一致。 图7 两种调制方式下的相电流仿真波形 图8 两种调制方式下的输出转矩仿真波形 从图8中可以看出,使用PWM-ON-PWM调制方式可以有效减少非换相期间的转矩波动。如果定义转矩波动为 (7) 式中,Tr为转矩波动,Tmax为最大电磁转矩,Tmin为最小电磁转矩,Tn为额定运行时的平均电磁转矩。 使用H_PWM-L_ON和PWM-ON-PWM两种调制方式下的转矩波动仿真结果分别为 (8) ΔTr=Tr1-Tr2=24.8% (9) 由式(9)可知,使用PWM-ON-PWM调制方式下的转矩波动比使用H_PWM-L_ON调制下的转矩波动降低了24.8%。由此可见,使用PWM-ON-PWM调制方式抑制了非导通相续流,进而减小了转矩波动,提升电机运行平稳性。 以仿真所用电机作为试验电机,用XILINX公司的XC6SLX9芯片作为控制核心搭建驱动器,对上述分析结果进行验证。 图9为施加相同轻载、占空比为0.8时两种调制方式下的B相相电流波形图,其中上面通道和中间通道分别为控制芯片输入A相上桥臂和C相下桥臂的PWM波形(本文所使用驱动板上下桥臂输入低电平开通,高电平关断),下面通道为B相相电流波形。从图9(a)中可以看出使用传统调制方式H_PWM-L_ON会造成续流且续流发生位置与理论分析完全一致;从图9(b)中可以看出使用PWM-ON-PWM调制方式可以完全消除此续流现象。 图9 d=0.8两种调制方式下的实测相电流波形 图11中Δi1,Δi2分别为H_PWM-L_ON和PWM-ON-PWM调制下相电流最大波动值,im为使用H_PWM-L_ON调制下续流峰值。综合对比图9、图10和图11可得出,随着占空比降低,传统调制方式下的非导通相续流逐渐严重,相电流波动加剧;PWM-ON-PWM在不同占空比下均可有效降低非导通相续流、优化相电流波形,且在低占空比下优化效果更为显著。 图10 不同占空比两种调制方式下的实测相电流波形 图11 两种调制方式下相电流最大波动值和续流峰值 (1)以H_PWM-L_ON调制方式为例,分析了PWM调制方式造成非导通相续流的原因,并从理论上证明了采用PWM-ON-PWM调制能够完全抑制非导通相续流的发生。 (2)通过Simulink仿真及试验验证了采用PWM-ON-PWM调制方式可以完全抑制非导通相续流,优化相电流波形,减小非导通相转矩波动,并且在低占空比下优化效果显著。 (3)采用H_PWM-L_ON调制方式时,逆变器只有三个上管进行PWM调制,而采用PWM-ON-PWM调制使得上下开关管都参与调制,在相同的开关频率下有效地降低了逆变器三个上管的动态损耗。

1.2 PWM-ON-PWM


2 仿真验证


3 试验验证


4 结 语
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28电源学报(2022年5期)2022-10-13 03:12:34东北大学学报(自然科学版)(2022年3期)2022-04-01 11:36:38莆田学院学报(2021年5期)2021-11-13 06:36:38新型工业化(2021年8期)2021-10-23 10:27:10电子与封装(2021年7期)2021-07-29 10:58:48电动工具(2020年2期)2020-04-22 07:22:50甘肃科技(2020年20期)2020-04-13 00:30:22电测与仪表(2016年1期)2016-04-12 00:35:12电测与仪表(2016年17期)2016-04-11 12:39:34
