一种晨昏太阳同步轨道卫星太阳捕获控制方法*
2021-01-08 13:14刘善伍郭崇滨高海云
航天控制 2020年6期
刘善伍 郭崇滨 高海云 王 俊
1.上海微小卫星工程中心,上海200050 2.中国科学院大学,北京100049
0 引言
磁测磁控卫星由于其结构简单、可靠性高、成本低的特点,受到广泛关注[1-4],尤其是在卫星入轨初期速率阻尼和姿态捕获方面发挥着重要的作用。
目前,卫星入轨或需要能源供给时基本采用多敏感器组合确定卫星姿态,采用推力器或飞轮作为卫星姿态控制执行机构进行姿态机动,使太阳帆板指向太阳,从而实现捕获太阳。这种太阳捕获方式资源要求多,对部组件的可靠性要求高,尤其在入轨时,卫星能源有限,往往要求采用低功耗高可靠部件实现太阳捕获,当前国内外文献中多见具有偏置动量轮辅助的磁控研究[5-7],而纯磁控的研究比较少见,文献[8-10]的纯磁控方法复杂,需要多敏感器确定姿态,成本高可靠性低,文献[11]中的方法虽然只用太阳敏感器作为姿态敏感器,但执行机构需要采用推力器,可靠性低。
对于高功能密度的微纳卫星来讲,由于体积、重量、功耗等限制,没有更多的资源可利用,因此,采用高可靠极简单的部组件实现太阳捕获十分必要。本文以某型号卫星为研究背景,提出一种工程适用的极简配置的太阳捕获新方法,该方法利用晨昏太阳同步轨道的特点,不依赖于其他敏感器和执行机构,仅采用磁强计与磁力矩器即可实现太阳捕获。该方法简单易行,工程成本极低,可靠性高。
1 卫星姿态动力学模型
对于多数卫星,其动力学皆可简化为刚体的动力学模型[12],如式(1)所示。
(1)
式(1)中:





当卫星上没有角动量部件并忽略惯量积时,式(1)可简化如下:

(2)
2 绕Y轴自旋的卫星滚动和偏航通道在阻尼力矩下的稳定性分析
滚动和偏航通道采用如下形式的负反馈阻尼力矩:

(3)
式(3)中φ为滚动角,ψ为偏航角,kdx,kdz为正的增益系数。
卫星绕y轴自旋角速度为ωyr,在小角度假设下,将动力学模型式(2)中滚动和偏航通道用姿态表示如下:

(4)
滚动和偏航通道的特征方程为:

(5)
即:
a4s4+a3s3+a2s2+a1s+a0=0
(6)
根据劳茨判据,得出,当满足如下条件时,滚动和偏航通道是稳定的:
(7)
在本研究中,阻尼力矩采用磁控阻尼,由于磁控阻尼是三轴耦合的复杂控制过程,无法实现三轴控制解耦,但从能量角度和最终的控制目标看,其结果都是使能量衰减,达到减小角速度的目的,因此工程上采用磁控进行阻尼时,可获得同样的效果。
3 磁控太阳捕获算法研究
3.1 磁控太阳捕获控制系统组成
磁控太阳捕获控制系统硬件包含三轴磁强计和三轴磁力矩器,软件为磁控太阳捕获控制算法,如图1所示。

图1 磁控太阳捕获控制系统组成
3.2 晨昏轨道太阳捕获期望姿态分析
晨昏太阳同步轨道太阳方位示意图如图2所示。

图2 晨昏太阳同步轨道太阳方位示意图
图中:xoyozo为轨道坐标系,Vs为太阳矢量。
晨昏太阳同步轨道太阳矢量始终基本位于轨道-yo方向,因此将卫星本体yb轴控制与yo轴重合,并将太阳帆板贴有太阳电池片的一面安装指向-yb方向,即可实现太阳指向。换言之,将卫星本体坐标系xbybzb相对于轨道坐标系xoyozo姿态的滚动角和偏航角控制趋于0,即可实现太阳电池阵法线基本指向太阳。因此,晨昏太阳同步轨道太阳捕获姿态控制目标如式(8)所示。

(8)
式(8)中φc为期望的滚动角,θc为期望的俯仰角,ψc为期望的偏航角。
3.3 晨昏轨道太阳捕获控制算法
按照第2节分析的结果,给卫星yb轴施加自旋力矩,给滚动和偏航通道施加阻尼力矩即可实现式(8)的控制目标。
滚动-偏航通道施加磁控阻尼力矩,即卫星yb轴磁矩Py按照如下方式产生:
(9)
俯仰通道施加自旋力矩,即xb和zb轴磁矩Px,Pz按照如下方式产生:
(10)
式(9)和式(10)中:Bx,By,Bz为三轴磁强计测得的卫星本体坐标系下的磁场强度;P0为标称磁矩;
Ty=kdy(ωyr-ωyc)为Y轴自旋力矩;
kdy为正的增益系数,ωyr为小于0的yb轴期望角速度,ωyc为测量获得的Y轴角速度。由于没有角速度测量部件,yb轴角速度可以通过磁强计测量的地磁场近似获得:
4 仿真分析及在轨运行结果
以某型号卫星为例,仿真参数如表1所示。

表1 卫星太阳捕获控制仿真参数
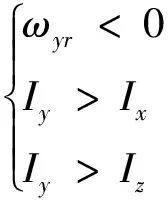
按照上一节的磁控方法进行太阳捕获控制仿真,仿真结果如图3~5。从图3中可以看到卫星滚动和偏航轴很快完成速率阻尼,并且俯仰轴角速度起旋到期望的-2(°)/s;从图4可以看到卫星滚动角和偏航角逐渐收敛;同时图5中太阳矢量和帆板法线夹角亦随之逐渐收敛,最终实现了太阳捕获。
该方法已经成功应用在中国科学院微小卫星创新研究院的软件定义卫星(简称TZ-1)入轨太阳捕获模式上,在轨实际遥测数据表明该方法获得了满意的效果。
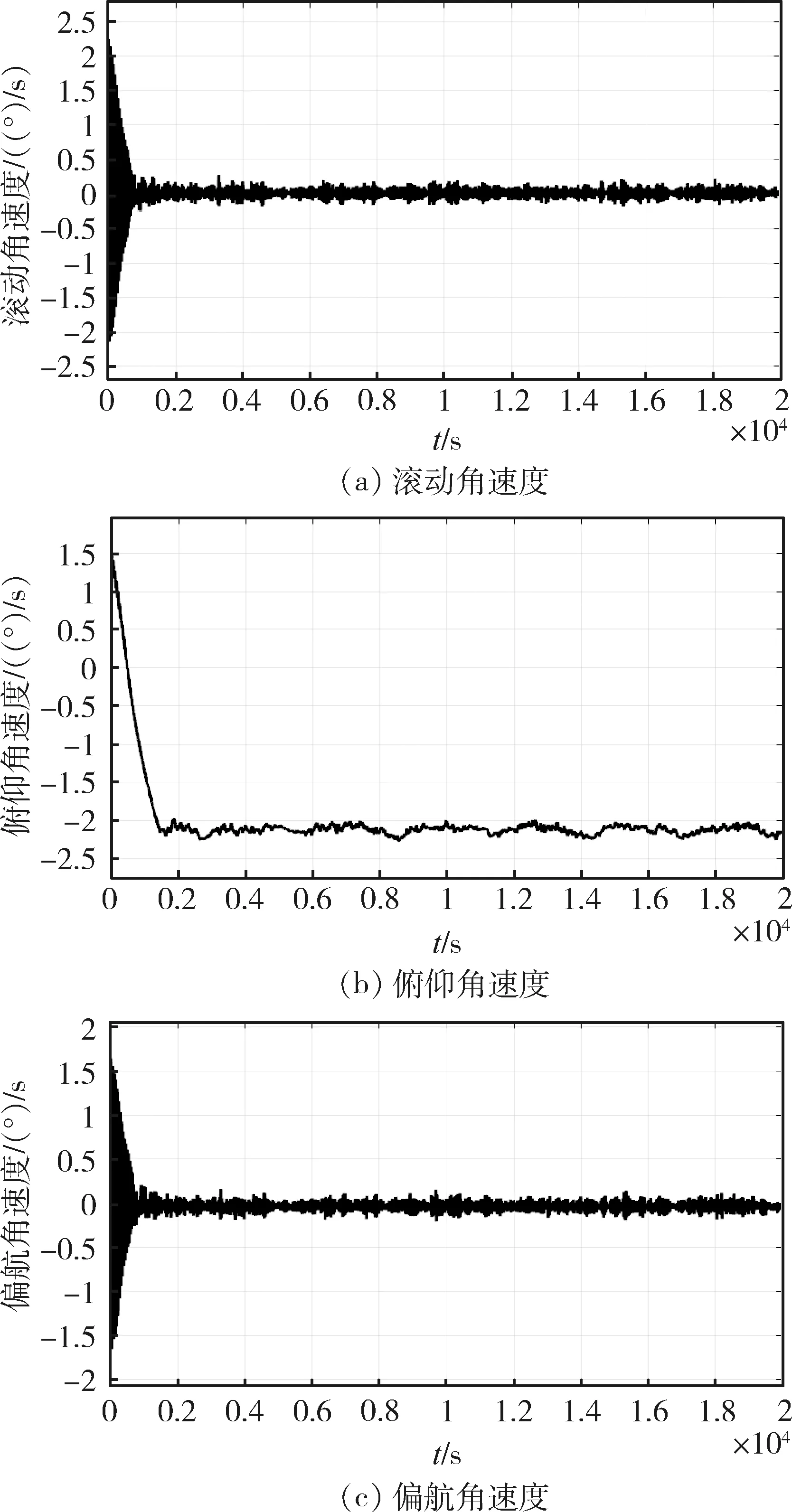
图3 磁控太阳捕获三轴角速度

图4 磁控太阳捕获三轴姿态角

图5 磁控太阳捕获太阳矢量与帆板法线夹角
5 结语
研究了极简配置晨昏太阳同步轨道上卫星太阳捕获方法,仅利用磁强计和磁力矩器即可实现,无需复杂昂贵的其他高精度敏感器和执行机构,尤其是该方法实施太阳捕获可充分利用轨道特点,无需依赖太阳矢量测量,方法简单可靠,工程适用价值高。另外,通过近似方式,充分利用三轴磁强计测量的磁矢量间接获得卫星角速度信息,省去了惯性测量部件。从仿真结果中可以看到,该方法是切实有效的,可以达到太阳捕获的目的,因此,本文中所研究的方法简单可靠,已成功在轨应用,可推广至其他工程航天器。
猜你喜欢
西北工业大学学报(2022年2期)2022-05-11
装备制造技术(2021年1期)2021-05-21
空间科学学报(2020年4期)2020-04-22
燕山大学学报(2020年1期)2020-03-12
传感器与微系统(2018年7期)2018-08-29
中学生数理化·高一版(2017年3期)2017-07-08
电气技术(2016年3期)2016-10-14
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
综合智慧能源(2015年12期)2015-04-24