混响背景下基于分数阶傅里叶变换的自适应LMS滤波算法
2021-01-08 08:32王易川程玉胜
声学技术 2020年6期
马 凯,王易川,陈 喆,程玉胜
(海军潜艇学院航海观通系,山东青岛 266000)
0 引 言
最小均方误差(Least Mean Square, LMS)算法是由Hoff和Widrow在1960年提出的,它计算量小,并且算法简单容易实现[1-3],被广泛用于信号处理的各个方面。此外,LMS算法还可用于处理非平稳信号[4],这是因为它不需要预知信号和噪声的自相关函数。但在固定步长的 LMS算法中,收敛速度和稳态误差是一对矛盾:收敛速度越快,稳态误差越大。针对此问题,提出了各种变步长 LMS算法[5-11],这些算法在迭代初始阶段,为获取较快的收敛速度,采用较大步长;当算法收敛后,为获得较小的稳态误差,采用较小的步长因子。
变步长 LMS算法的出现,解决了收敛速度和稳态误差之间的矛盾,但在信混比较低的情况下,性能较差,尤其随着现代主动声呐向低频、大功率的方向发展,混响对主动声呐性能的影响日趋凸显,如何提高算法在低信混比下的性能显得尤为重要。利用时域和频域结合的处理方法,包括小波变换、分数阶傅里叶变换(Fractional Fourier Transform,FRFT)[12-16]、自适应滤波及Wigner分布可以较好地滤除混响。基于此,本文提出一种基于分数阶傅里叶变换的自适应LMS滤波算法。
1 分数阶傅里叶变换
如果将信号的傅里叶变换看作是将信号沿逆时针方向旋转π/2,由t轴变为ω轴,则FRFT可以看作是时间轴t逆时针旋转α角后信号的时频分布在u轴上的投影,其定义式为

2 变步长LMS算法
LMS算法的计算公式为

其中:x(n)为输入信号;W(n)为自适应滤波器的权系数;d(n)为参考信号;e(n)为误差,µ为算法的迭代步长。
变步长 LMS算法遵循的基本原则为:在算法收敛的初始阶段采用较大的步长因子以加快算法的收敛速度,当算法收敛后应采用较小的步长因子以减小稳态误差,同时算法的计算量要小。
针对稳态误差与收敛速度之间矛盾的问题,提出了一系列变步长 LMS算法。其中,比较经典的是覃景繁等[8]提出的基于 Sigmoid函数的变步长LMS算法(Sigmoid-Variable-Step Least Mean Square,SVS-LMS),其步长因子计算公式为

其中,α控制函数曲线的陡峭程度,β控制函数的值域大小。
由式(6)可得,当µ>β/2并且0<µ<1/λmax时,算法收敛,其中λmax是输入信号自相关矩阵的最大特征值。SVS-LMS算法的步长因子µ相比于固定步长 LMS算法的步长因子是变化的,在算法迭代的初始阶段,步长因子较大,因此具有较快的收敛速度;而当算法收敛时,误差e(n)最小,此时µ(n)也最小接近于0。但如图1和图2所示,该步长因子计算公式在算法收敛阶段(即当µ(n)接近 0)时,µ(n)变化较大,不具备平缓变化的特点,导致稳态失调变大,并且计算公式也较为复杂。
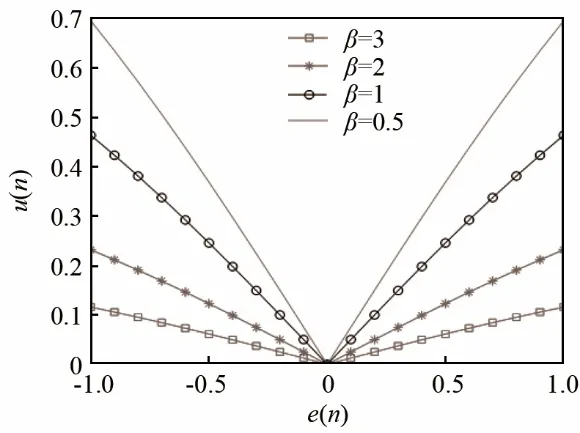
图1 β取值对误差变化的影响Fig.1 The influence of the value of β on the error variation
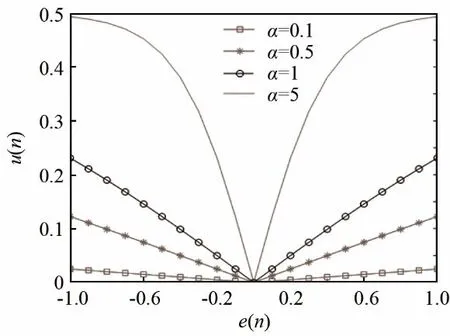
图2 α取值对误差变化的影响Fig.2 The influence of the value of α on the error variation
针对上述问题,文献[11]提出一种基于正态分布曲线的变步长 LMS算法,此方法在信混比较高的条件下性能较好,但在信混比较低情况下性能较差,基于此本文在分析基于正态分布曲线的变步长LMS算法的性能的基础上提出一种基于傅里叶变换域的自适应LMS算法。
正态分布曲线如图3所示,正态分布曲线顶部相较于Sigmoid函数顶部更加平滑,并且上升和下降速度较快,其概率密度函数为


图3 自适应LMS滤波算法采用的正态分布曲线Fig.3 Normal distribution curve for adaptive LMS filtering algorithm
式中,σ为标准差。
对函数进行简单的反转平移变换,并引入a、b、c3个参数以增强函数可控性。将误差函数e(n)及步长因子µ(n)代入得:

下面通过仿真验证算法的性能。
假定输入信号为噪声和单频信号的叠加,噪声是均值为0、方差为1的高斯白噪声。其中信号在第1 000个采样点处,信噪比为0 dB,参考信号为均值为0、方差为1的高斯白噪声,每次仿真均进行 1 000次蒙特卡洛仿真。未知系统的权系数为[0.70, 0.42],未知系统在第700个采样点处发生时变,权系数突变为[0.47, 0.31],用以比较算法的跟踪能力。
图4为3种算法的权系数收敛图。其中,每种算法在此条件下的最佳步长因子及参数都经过多次蒙特卡洛仿真实验确定,固定步长 LMS算法的步长因子µ=0.01,SVS-LMS算法的参数α=1.5,β=0.1,基于正态分布曲线的变步长 LMS算法的参数a=10,b=1,c=0.1。从图4中可以看出,在算法的收敛速度上基于正态分布曲线的算法优于SVS-LMS算法及LMS算法;当未知系统突变时,基于正态分布曲线算法的跟踪性能最优,SVS-LMS算法次之,LMS算法性能。

图4 3种算法的权系数收敛曲线图Fig.4 Convergence curves of the weight coefficients of three algorithms (SVS-LMS, LMS and the one in this paper)
图5为固定步长LMS算法、SVSLMS算法和基于正态分布曲线算法的均方误差图。从图5中可以看出,基于正态分布曲线的算法的稳态误差最小,SVS-LMS算法的稳态误差较大,固定步长LMS算法的稳态误差最大。

图5 三种算法的均方误差曲线图Fig.5 Mean square error curves of the three algorithms
这是因为基于正态分布曲线算法的步长因子曲线在误差较小时非常平缓,并且较小,所以稳态误差较小;SVS-LMS算法的步长因子曲线在误差较小时比较陡峭,导致稳态误差较大;固定步长LMS算法由于步长固定且较大,所以稳态误差较大。当输入信号发生变化时,这几种算法的稳态误差大小排序与未发生变化时一样,基于正态分布曲线算法的稳态误差依然最小,固定步长 LMS算法的稳态误差最大,表明在算法的跟踪能力方面,基于正态分布曲线的算法性能较优。
综上:基于正态分布曲线的变步长LMS算法在收敛速度、稳态误差和跟踪能力方面的性能较好。
3 基于分数阶傅里叶变换的变步长LMS算法
变步长 LMS算法在信混比较高的情况下具有较好的性能。但在实际的信号处理过程中发现,信号的信混比通常较低,此时如果直接利用 LMS算法进行滤波,则效果不是很理想。针对低信混比下,LMS滤波算法性能下降的问题,提出一种基于分数阶傅里叶变换的 LMS滤波算法,算法处理流程如图6所示。其处理过程如下:
(1) 将信号进行分数阶傅里叶变换;
(2) 峰值搜索寻找最优变换阶数p和分数阶变换域峰值α0;
(3) 对参考信号d(n)进行p阶分数阶傅里叶变换得到D(k);
(4) 以α0为中心对变换域信号进行带通滤波,滤除部分干扰;
(5) 对得到的信号进行分数阶傅里叶反变换;
(6) 对第(5)步中得到的结果进行自适应 LMS滤波,得到最终输出。

图6 自适应LMS滤波算法的处理流程Fig.6 Processing flow of the adaptive LMS filtering algorithm
4 计算机仿真及海试数据验证
下面通过海试数据验证算法在低信混比下的性能。发射信号为线性调频(Linear Frequency Modulation, LFM)信号,中心频率为700 Hz,脉宽0.4 s,采样频率为 20 000 Hz,信号位于 30 000~38 000个采样点处,信混比为0 dB。
图7为原始信号,此时信混比较低,无法判定信号的具体位置,图8为本文基于正态曲线的自适应LMS算法滤波后的结果,虽然信混比有所提高,但此时混响能量依旧较强。下面利用本文提出的基于分数阶傅里叶变换的LMS算法进行处理。
图9为LFM信号的信号能量在(p,u)二维平面上的分布,通过二维峰值搜索,寻找最佳变换阶数p以及峰值α0。图10为在分数阶变换域进行带通滤波,最后进行分数阶傅里叶反变换得到滤波后的信号。此时信号的信混比虽然有所提升,但混响依然较强。

图7 原始信号Fig.7 The original signal

图8 基于正态曲线LMS算法滤波后信号Fig.8 The filtered signal of the normal distribution curve based LMS Algorithm
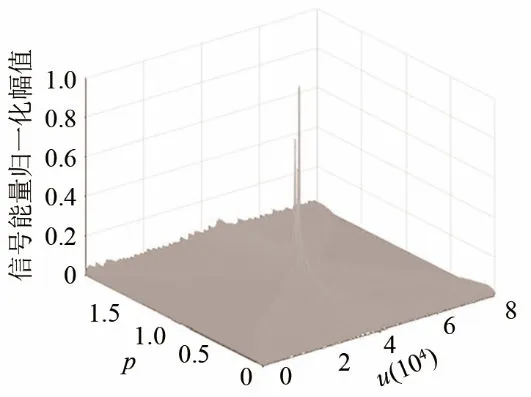
图9 线性调频信号的信号能量在(p,u)二维平面上的分布Fig.9 Distribution of LFM signal energy on the (p, u) plane

图10 “分数阶傅里叶变换—带通滤波—分数阶傅里叶反变换”处理后的结果Fig.10 The results after “FRFT−band-pass filtering−FRFIT”processing

图11 本文算法滤波后信号Fig.11 The filtered signal of the algorithm in this paper
图11为本文算法滤波后的最终结果。此时已滤除大部分混响,信混比提高了约6 dB,验证了本文算法具有较好的性能。
5 结 论
针对低信混比下传统的变步长 LMS滤波算法性能较差的问题,本文提出了一种基于分数阶傅里叶变换的的变步长 LMS滤波算法。算法首先对信号进行分数阶傅里叶变换滤波,滤除部分混响,再对得到的信号进行变步长 LMS滤波。计算机仿真和海试数据验证结果证明了算法能较好地滤除混响,一般情况下可使信混比提高约6 dB。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
吉首大学学报(自然科学版)(2021年3期)2021-12-16
少儿科技(2021年12期)2021-01-20
中国惯性技术学报(2020年2期)2020-07-24
科技资讯(2020年14期)2020-06-27
成都信息工程大学学报(2019年2期)2019-08-28
统计科学与实践(2019年1期)2019-03-28
北京航空航天大学学报(2018年1期)2018-04-20
环球市场信息导报(2016年41期)2017-01-19
浙江大学学报(工学版)(2016年11期)2016-06-05