舰船尾流气泡声学测试系统研究
2021-01-08 08:31张庆国刘竹青黄其培
声学技术 2020年6期
张庆国,刘竹青,黄其培,连 莉
(1.昆明船舶设备研究试验中心,云南昆明 650051;2.中国船舶科学研究中心,江苏无锡 214082)
0 引 言
舰船尾流气泡测试技术对尾流自导鱼雷和水下推进器的研制使用至关重要,尤其是尾流的物理参数对尾流自导鱼雷作战使用极为重要,如在尾流自导鱼雷攻击水面舰实际航行(简称“实航”)试验中,需明确作为目标的水面舰尾流需满足尾流自导鱼雷的判定条件。另外,该研究还可应用于水面舰船/水下航行体的动态监测,以及水下推进器等设备的水池测试与验证,具有广泛的军事和民用价值,对论证研究科学合理的鱼雷作战使用方法、提高潜艇部队实战能力也具有重要意义。
舰船尾流是指舰船在航行过程中,在其尾部一定区域内的具有特殊性质的海水。从尾流所具有的不同物理效应来区分,可将尾流分为声尾流、热尾流、磁尾流、浑浊度尾流等。尾流自导鱼雷正是利用舰船尾流的上述部分特征进行远程探测与跟踪,具有很强的抗干扰能力和较远的自导距离与命中概率。因此,尾流制导鱼雷已经成为了当前水面舰船的最致命威胁,这也是各国大量装备该型鱼雷的主要原因。
舰船尾流的主要成分是不同尺寸的气泡和水体自身运动形成的湍流。舰船尾流中存在大量的气泡[1],其中绝大部分气泡是由于水下推进器高速运转空化形成,其他则由于舰船吃水部位渗入水中的大量空气,不断以气泡的形式进行聚集、扩散。尾流气泡形成后在重力、浮力、粘滞阻力三部分合力的作用下,历经溶解、上升及膨胀等过程。尾流中大部分气泡由于半径较小而上浮很慢,经螺旋桨搅动,在水中不停旋转,短时无法浮到水面,表现为一条白色的气泡带,最终形成尾流中长时存在的气泡层;湍流是指尾流中的水体不规则、无秩序的一种非线性流体运动,主要是由舰船螺旋桨搅动、水体热对流,或者水中溶解物浓度的改变引起的水体不规则运动。从物理结构上看,可以把湍流看成是由各种不同尺度,且大小及旋转轴方向分布为随机的涡,相叠合而成的水体流动。大尺度的涡破裂后形成小尺度的涡,较小尺度的涡破裂后形成更小尺度的涡。在舰船尾流区域内,大尺度涡不断地从尾流获得能量,通过涡间的相互作用,能量逐渐向小尺度涡传递。最后由于水体的黏性作用,小尺度涡不断消失,机械能转化(或耗散)为流体内能。
当前,对舰船尾流的目标特性等重要因素的关系不是很清楚[2]。另外,现有的试验测量还不够系统,且因试验海区、气象条件等环境因素影响,各种测量结果出入较大,难以形成可推广应用的统一结论。因此,急需加强对舰船尾流的基础性研究和试验测试研究。
舰船尾流气泡研究多采用声学、光学和热学三种方式。声学方式主要是采用主动或被动方法,利用尾流中气泡对声信号吸收、散射等特性,或者海水区域阻抗变化及气泡不断浮升、破裂变化过程中产生的声特征等信息进行测量。由于水声被动测量受环境影响较大,工程上多用主动声学探测方式,如尾流自导鱼雷的声学自导等。光学方式主要是通过前向和后向光散射特性来研究尾流气泡的分布规律,但受到光在海水中衰减影响,其作用距离极为受限。热学方式主要是基于舰船尾流影响海水温度分布现象进行远程测量,多采用热电偶或红外卫星等方法,如美国的卫星猎潜计划、俄罗斯的Almaz-1潜艇探测卫星等。由于声波在海水中传播衰减较小,可探测距离较远,因此,声学方式成为当前舰船尾流气泡测试的主要手段。
20世纪80年代,美国海军研究实验室和海军海岸系统中心,开展了舰船尾流几何参数及气泡声散射与吸收特性研究[3-4]。近年来,美、英、法等国家仍继续在舰船尾流声特性方面进行深入研究。法国利用直升机吊放声呐、舷侧阵、座底阵进行多次海上尾流探测试验,美国将相关成果成功应用并装备在MK-46、MK-48等型鱼雷,俄罗斯也形成了庞大的舰船尾流数据库,并成功装备65型反舰鱼雷[5]。
相对来说,国内对尾流气泡的研究起步较晚。哈尔滨工程大学在 1997年对湖面交通艇、摩托艇的尾流进行了测试,分别对水平和垂直两个方向进行主动探测,获得了尾流声信号回波包络及散射强度等信息随时间变化的曲线[6]。大连测控技术研究所于2006年在某海区,利用频率为400 kHz的收发分置换能器和频率为100 kHz的收发合置换能器等组成多波束发射接收装置,着重对频率为 400 kHz的垂直方向和频率为30 kHz(水平测试系统采用32元垂直阵进行接收,测试频率为 30 kHz)的水平方向进行了海上测试,获得了不同舰船、多种工况下的尾流几何特征和散射强度等声学特征[7]。西北工业大学及中船重工705所在2011年采用主动侧向声检测方法,利用收发合置声学基阵对实航舰船尾流气泡进行试验测试,结合自适应检测方法可有效识别舰船尾流气泡的有无及距离、散射强度等信息[8]。中国船舶科学研究中心在 2016年利用固定间隔的发射与接收换能器,采用频率为9~200 kHz的脉冲信号,在拖曳水池中对舰船模型尾流气泡进行主动声测量,获得了不同工况下的尾流气泡密度分布,并证明了舰船模型尾流中主要以直径100 µm以下的微气泡为主[9]。
研究资料表明,舰船尾流是一种由很多不同尺寸的气泡组成的气泡幕带,在气泡组合之后一段时间内(可达几十分钟以上),大气泡会发生上升并且破裂,小气泡则会进一步融合,剩余的微气泡的直径大约为10~150 µm,而对长时尾流气泡密度起主要作用的是直径为40~80 µm的微气泡[10];尾流气泡检测的重点对象正是这些剩余下来的、可以持续很长时间的微气泡。
本文在对当前现状分析的基础上,结合舰船尾流气泡量化测量、推进器试验测试,以及水下安防探测等相关需求,以工程实用性为主,设计一套可在 0~200 m范围内进行宽带可调频段主动声学测量尾流气泡的测试系统,以适应不同深度水域的使用需求,对尾流气泡的声散射特性进行多角度测量,给出相应实际航行测试结果。
1 测试系统方案
1.1 总体方案
水声工程中通常采用沉底式或船载式两种测量方式,以此为基础结合实际环境及需求进行实际方案设计。采用沉底式或固定式便于降低水声环境干扰,提高声学测量数据可靠性,但测量距离受水域深度限制,且施工较为复杂[4-5,9];采用船载式测量,兼顾水平侧向和垂直两个方向[6,8],测量水域基本不受限,但测量结果容易受到测量船只(非目标船)的影响,且不利于目标船与测量船之间的安全操控。采用(Remote Operated Vehicle, ROV)平台方式可解决上述测量距离受限、施工困难等问题,但同时供电、操控及平台自身噪声影响也成了必须要解决的问题。文献[7]以两个典型高频声波为主(频率分别为100 kHz和400 kHz),获得了部分尾流气泡的声学特征数据,但未能覆盖完整气泡群所对应的声学探测频段。
考虑到施工的便捷性和可靠性,具体结合实际需求,本文采用基于ROV平台的移动式一体化测试方案,见图 1。与尾流自导鱼雷较高的声学工作频段不同,该系统主要针对舰船尾流及推进器尾流气泡测试需求。综合现今研究成果及测试情况,尾流气泡声学探测主要针对 40~150 µm 尺寸的微气泡[8,9]进行探测分析,对应声学信号频段约为 20~90 kHz。另外,推进器对转桨和单桨的桨毂背景噪声在3.8 kHz和8 kHz附近存在功率谱峰值,10~30 kHz频段内噪声功率谱按照每倍频程 10 dB衰减,在30~63 kHz频段内为高频连续谱[11]。综合考虑,该系统声学频段选择3~100 kHz,兼顾推进器的噪声测量。其发射和接收分置设计,数据既实时传送至水上进行处理显示,又同步存储在ROV内部,作为数据备份。系统主要功能如下:
(1) 在开阔水域,采用ROV平台移动可控测量水面船舶推进器尾流区域的气泡声学特征等信息。其ROV平台可受控悬停在水下1~100 m的任意深度(包含沉底静默测量),垂直对舰船尾流气泡进行实时测量。
(2) 兼顾湖、海使用条件,具备水下设备的实时定位跟踪功能。可实时获得水面舰船、水下设备(如ROV)的位置信息,便于湖、海试验中的实时指挥与精确控制。
(3) 根据声学测量数据反演计算,获得尾流几何尺寸及气泡尺寸和密度分布等声学测量信息。移动式一体化测试系统工作示意图如图1所示。声学测量设备安装在水下单元ROV载体上,通过工作母船上的显控软件对水下单元进行操控,同时可在显控软件上实时显示水下单元(上安装有配套水声定位声源)的位置信息。具体测试过程中,水下单元可沉底静默测量,亦可悬停在水下一定深度,对目标船尾流进行测量,获得尾流气泡强度、谱结构等相关数据,经过计算反演可获得尾流尺寸、气泡分布密度等信息。其中,系统安装在ROV上的一体式换能器发射频率为3~100 kHz,接收频率为1~100 kHz。发射端依据工作频段用三个复合棒发射换能器组合实现,分别对应频段为 3~18 kHz、18~45 kHz、45~100 kHz;接收端利用 2个压电陶瓷圆环串联水听器实现,其频段分别为 1~40 kHz,40~100 kHz。将上述发射和接收换能器基封装一体,内部设计有反声障板等结构,组合换能器结构示意图如图2所示。

图1 移动式一体化测试系统工作示意图Fig.1 Operating diagram of the mobile integrated test system

图2 组合换能器示意图Fig.2 Schematic diagram of combined transducer
系统主要由水下单元和船载单元两部分组成,其组成框图如图3所示。
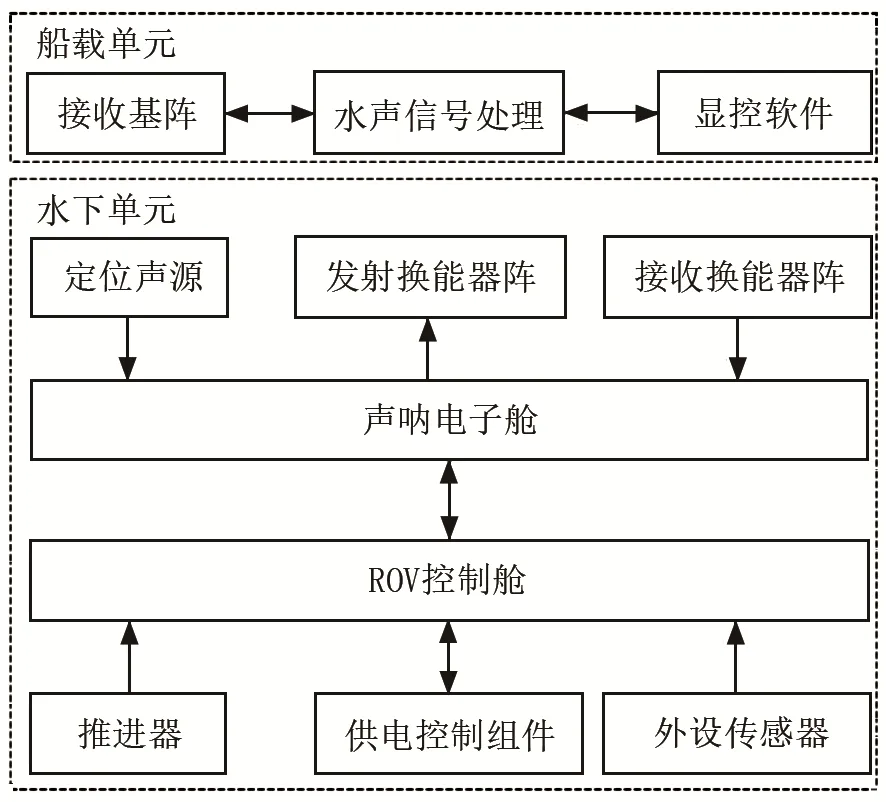
图3 系统组成框图Fig.3 Block diagram of the system
1.2 工作原理
工作原理主要涉及尾流气泡主动声学探测、水声定位跟踪,以及 ROV操控等相关工作原理。其中,舰船尾流气泡声学测试系统采用主动声学探测原理,利用设置不同频率、脉宽等参数的脉冲信号回波信息进行舰船尾流气泡的参数检测;水声定位跟踪,采用短基线同步式球面交汇原理实现水下目标的实时定位跟踪;ROV操控是利用外设深度传感器及检测系统、推进器控制分配器、姿态检测系统,结合模糊比例积分微分(Proportion Integration Differentiation, PID)控制方法完成整个ROV操控。
系统工作分为移动单元精确就位和尾流气泡测量两个过程。移动单元就位时,移动单元搭载主动声学装置测量单元、数据采集系统进行沉底静默或悬停就位,就位过程中,水声定位单元根据接收与解算测量单元所发出的同步水声定位声信号,并采用球面交汇原理对 ROV进行持续定位跟踪,在船载显控软件系统指控下完成测量点就位;尾流气泡测量时,通过显控软件设备探测声脉冲信号频率、脉宽、周期等参数,实时发射3~100 kHz的探测声学脉冲信号,数据采集系统将实时对尾流气泡的回波信号进行采集、存储及传输,最终通过显控软件对回波信号数据进行处理分析,实现尾流气泡的声散射特性测量,其系统工作原理如图4所示。

图4 系统运行示意图Fig.4 Schematic diagram of system operation
2 尾流气泡声学探测理论基础
2.1 尾流气泡声学特征
国内外对舰船尾流气泡密度谱的研究大都以谐振估计方法为基础,各研究机构均对舰船尾流气泡密度谱函数进行深入研究。假设尾流气泡处于谐振状态下,则气泡体积散射强度Sv计算公式为[6]

式中:δ气泡振动的阻尼系数,主要由辐射衰减构成;n为每立方米体积内的气泡数量;a为气泡半径。
根据 Bergmann等的试验研究[12],对于一个受迫振动的气泡来说,可以近似为δ≈ka=2πf0a/c(k为角波数,f0为中心频率,c为声速)。Bergmann等的试验多次指出,计算值比试验测试值要低,参考试验测试数据如表1所示。
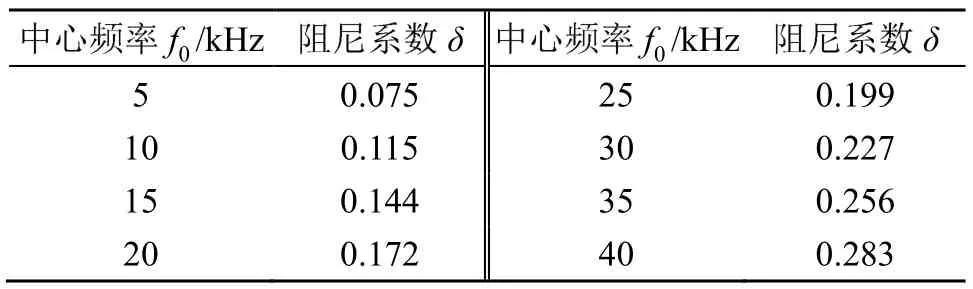
表1 共振时气泡阻尼系数测量表[12]Table 1 Measurement data of bubble damping coefficient at resonance[12]
由于,计算值与试验测试数据相差较大,本文采信上述表1试验测试数据,拟合δ计算公式为

式中,f为声信号工作频率。
采用谐振估计法及迭代算法进一步提高声衰减系数的估计精度[13-15],利用声呐方程的瞬态形式。按照球面波衰减规律,其水下噪声宽带声源级计算公式为

式中:τ0为瞬态脉冲发射宽度,单位ms;τt为有效声源级处理时间,单位ms;LS'为瞬态脉冲声源级,单位dB,其计算公式为

式中:V为脉冲持续时间内的电压均方根有效值,单位 V;20lgK为测量放大器的增益,单位 dB;20lgM为水听器接收灵敏度,单位dB(0 dB参考值1 V·µPa-1);R为水听器和测试样机距离,单位m。其中L'S、20lgK、20lgM等数据可试前通过计量测试获得,而距离R可在实时测量中采用声学测距原理获得,其计算公式为

式中:t为声脉冲传输时间,单位 s。需要注意的是,本系统中发射端与接收端在同侧,其传播距离R是双程(R=2h,h为组合换能器深度),即声信号发射端传输至接收端的实际距离。
舰船尾流气泡的声学特性主要是,气泡对声波产生声散射和声吸收。在入射声波的作用下,气泡发生受迫振动,并作为次级源向外辐射声能,产生气泡对声波的散射作用;气泡受迫振动会发生压缩和扩张,从而与周围介质发生热传导作用,将部分声能转变为热能向周围介质传播,并且由于流体的黏滞作用,气泡表面与水的摩擦也使声能发生衰减,产生对声波的吸收作用。小气泡的谐振频率fres计算公式为[13]

式中:r为气泡半径(取不同数值,单位 µm),γ为气体比定压热容与比定容热容之比,ρ为海水密度,P0为气泡的压力,其γ、ρ、P0可查表获知。依据式(6),代入不同参数,对不同尺寸气泡在不同水深下,其共振频率仿真曲线见图5所示。

图5 不同尺寸气泡在不同水深下的谐振频率曲线Fig.5 Resonance frequency curves of different sized bubbles at different water depths
2.2 舰船尾流几何参数
通常情况下,舰船尾流的几何模型是指尾流的长度、宽度和厚度,舰船尾流后端水平面内的扩展速度等。舰船气泡尾流的横向剖面形状呈高斯分布形状,气泡尾流的起始端宽度仅为船体宽度的一半,但在螺旋桨和船尾流所产生湍流的强烈作用下,尾流中的气泡会在近程初始扩散区沿宽度方向以30°~60°的角度向左右迅速扩展,到达船后几十米距离处的远尾流衰减区后,扩展角转变为1°左右。舰船尾流长度示意如图6所示。
舰船尾流的长度实际上是尾流的寿命,与舰船的航速、海况,以及尾流性质和探测方法有关。通常在光学测试中,近似认为尾流持续时间是航速Vk的线性函数,经验公式为

式中:T为尾流存在时间,a为比例系数,a≈1.4,Vk为舰船速度,b为修正系数。
在声学测试中,如鱼雷制导检测舰船气泡尾流的有效长度(即制导装置动作的尾流长度)通常经验公式为

式中:Lwa为舰船尾流长度,单位m。Ca为常数,与海况及尾流自导检测能力有关。
舰船尾流从舰船尾端开始成锥形分布,夹角为40°~50°,到某一距离L'wa(L'wa=10~100 m)之后以大约1°的角度向外扩展(如图6所示)。舰船尾流宽度Wwa的公式为
当距离大于L'wa时:

距离小于L'wa时:


图6 舰船尾流长度示意图Fig.6 Schematic drawing of ship wake length
舰船尾流厚度与舰船推进器吃水深度和实际尾流长度相关,其示意图如图7所示。
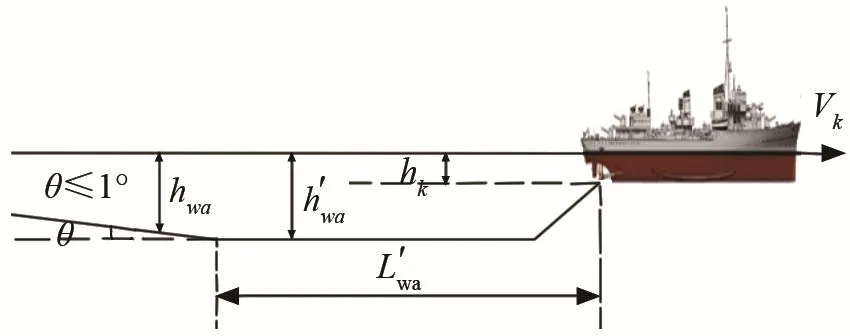
图7 舰船尾流厚度示意图Fig.7 Schematic drawing of ship wake thickness
舰船尾流厚度公式如下:

式(11)、(12)中:hk为舰船吃水深度,h'wa为尾流初始厚度,hwa为观察时刻的尾流厚度,L'wa为尾流的初始长度,Lwa为观察时刻的尾流长度。
3 湖上试验
根据总体方案开展技术设计,着重考虑ROV本体与安装声学测试设备之间的匹配性,同时兼顾工程可靠性和经济性。内部电子电路及传输通路均进行冗余热备份,研制工程样机主要水下部分实物见图8所示。

图8 系统水下部分实物图Fig.8 Physical drawings of underwater parts of the system
通常主动声学探测方法均离不开相应水声条件限制,如声源级、探测距离等的限制。为了更准确地获得舰船尾流气泡的声学特征,需要充分考虑实际水声环境等因素,并且确保测量距离要大于尾流气泡的深度,以满足声学远场测量条件,并且不能距离尾流太远,一般取5~8倍的舰船吃水深度为佳。
本文采用ROV沉底静默或悬停的方式,对水面舰船尾流气泡进行测试。其沉底静默方式与常用工程测试方法相同,具有水下背景干净等优势,但受限于试验水域的深度,如当前水深远大于舰船吃水深度(h≫hk,h为水深,hk为舰船吃水深度),采用沉底静默测量则会降低测量精度(距离太远,水声测量误差增大),甚至无法获得有效的测量数据。采用ROV悬停模式进行测量,可解决上述问题,使其测量不受水深限制,但需充分考虑ROV推进器工作时带来的自噪声影响,如对ROV悬停噪声集中的频段进行规避、滤波等处理。
为了验证本文方案的可行性,在开阔水域对固定尺寸的金属球壳进行测量准确度验证,之后进行水面船只高速航行验证试验。
3.1 水下目标强度测试试验
对于弹性目标的频率响应求解相对复杂,回声与目标的材质、结构尺寸等参数相关。但刚性目标相对容易求解,求解时的表面边界条件相对简单(目标表面振动速度为0),不需要考虑目标的材料特性和声波透射入目标情况。也就是说,理想刚性球体目标的反射强度只和几何形状相关。理论上球体的目标强度计算公式为

式中:ST为目标强度,r为球体半径,单位m。由于球体任意入射角度,都不影响其测量的目标强度数据,因此,实际试验中使用球体以便于实施验证。具体实施时,利用现有的金属浮球作为被测对象。浮球为金属球壳,存在球壳谐振影响,其目标强度与声波的入射角度无关。另外,目标强度除了与金属球半径相关外,还需考虑其谐振频率。根据共振散射理论(Resonance Scatteriny Theory, RST)[16]可以仿真计算所选球壳的形态函数,从而获得球壳的谐振频率范围,便于湖上试验中对其目标强度声脉冲信号的频段选择与计算,钢球形态函数仿真曲线仿真结果见图9所示。

图9 钢球形态函数仿真曲线Fig.9 Simulation curve of shape function of steel ball
由图 9,根据所用金属球壳的形态函数仿真数据,其谐振频率在20 kHz附近,可根据此仿真进行针对性的声波探测试验,缩小声波频率范围,提高试验效率。
具体湖上试验时,将标准金属球壳固定吊放在探测用 ROV上方,选择不同频段声脉冲信号进行探测,重复多次获得金属球壳的水下目标散射强度。试验中选用圆形钢球,其半径为 0.2 m,壁厚为 2 mm,代入式(13)可知,其目标强度理论值为−20 dB,谐振频率范围为21~23 kHz。测量过程中选择10~50 kHz的声脉冲信号进行探测,为了降低水面反射等的影响,声信号脉冲宽度设置为1 ms。需要注意的是,在实际计算时需要代入声学换能器的初始参数进行校正,如前置放大增益、接收灵敏度、发射声源级等。对应谐振频段内实际测试球体的声反射强度为−22.8~−19.2 dB,实际测量结果如图10所示。考虑到水中杂质散射等影响,实际测量值略与理论值有较好一致性,也证明代入的试前测量修正量准确,可进行后续实航测试。
由于工程测试中需要,式(13)需要被测目标尺寸(半径0.2 m)大于声信号波长λ,按照常规5倍波长反推,其可信探测声信号频率在18.75 kHz (声速c取1 500 m·s-1)以上。因此,图10中18 kHz以下的测量数据不作为比对依据。
3.2 水面高速船实航试验
利用玻璃钢船在水面做高速航行运动,船只长为7.5 m,宽为3 m,吃水深度为0.35 m,舷外挂机的螺旋桨在水下深度为 0.8 m。试验水域为某湖开阔区域,区域平均水深为35 m,玻璃钢船经过测量点时航速为10 kn (1 kn=1.852 km·h-1)。另外,为了精确控制 ROV和玻璃钢船之间的位置信息,除ROV上配套水声定位声源外,在玻璃钢船上安装有差分全球定位系统(Differential Global Position System, DGPS)设备。为便于试验现场操作与指控,显控软件上可实时获得玻璃钢船、水下 ROV的位置信息。
众所周知,水声探测方法与光学等其他方法相比较,具有简单、实用性强,测量范围大等优点,这也是基于声学的海表层尾流气泡分布的声学探测方法得到迅速发展的主要原因。但声学探测方法也存在易受水声环境影响等不足,甚至在不同的水声环境其测量精确度会有变化。本文除了在试验前进行系统特性(如前置放大、滤波及声源级等)计量测试外,还采用了比对测量方案。在无尾流环境下,获得宽带频率内的声波测量数据作为基础。之后利用实时测量数据与无舰船尾流数据进行比对分析,可降低水声环境影响,进一步提高探测精度。实航测量的声学信号如图11所示。
如图 11所示,每组发射信号后面紧跟反射信号,反射信号频率与发射信号频率相同,功率谱叠加显示。采用0.5 s的重复周期发射频率为75 kHz的窄脉冲信号连续测试,采用式(1)、(2)中的体积散射强度计算公式,对连续时间水声探测声信号进行数据处理,结合试前标定的前置放大增益、水听器灵敏度以及发射声源级等先验数据获得实际舰船尾流中气泡的体积反射强度。值得注意的是,实际水声计量中,多按照1/3倍频程给出测量数据,在实际计算中需要进行拟合处理,以获得实际测试中不同频点的修正量。

图11 实航试验中声学测量信号的波形和频谱Fig.11 Waveform and spectrum of measuring signal in actual navigation test
根据上述比对方式测量舰船尾流气泡的目标强度为−21.8~−21.6 dB (对应频率为 50~80 kHz),测量重复性较好。利用声脉冲信号的反射强度及传输时延可获得舰船尾流气泡的基本尺寸等信息,通过反演计算亦可获得气泡的分布信息。利用系统连续测量水面船只航行后形成的尾流气泡层,获得其气泡反射信号幅值随深度和时间变化曲线如图 12所示。
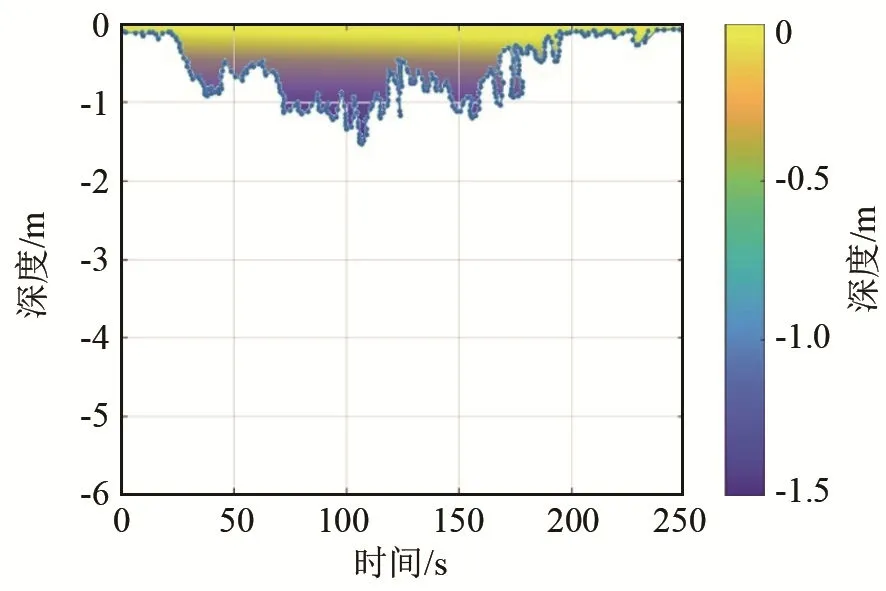
图12 尾流气泡反射信号幅值随深度及时间变化曲线图Fig.12 Variations of the amplitude of wake bubble reflection signal with depth and time
实际上,舰船尾流气泡长度与其持续时间紧密相关,即指尾流产生处(如舰船尾部)与不能检测到尾流点之间的距离。按照玻璃钢船航速10 kn计算,依据经验式(8),其尾流长度约为 800~900 m(常数Ca≈180)。在本文的湖上实航试验测试中,玻璃钢船尾流气泡持续时间约为173 s (如图12所示),折算距离为865 m,这与式(8)的计算结果基本相符。另外,根据尾流气泡声反射时延的连续估算可以计算尾流气泡层的厚度信息,结合波束旋转即可获得尾流气泡的宽度。典型的尾流气泡时域波形如图13(a)所示。图13(a)的局部放大图如图13(b)所示。具体将无尾流与有尾流时采集的声信号进行比对分析,无尾流时基本上为水面反射波,有尾流时含水面及尾流气泡反射波叠加。其中无尾流情况测试脉冲为宽脉冲,实际有尾流时选择窄脉冲。按照式(11)、(12)计算,尾流气泡的深度在1.2~1.6 m范围内,实际测量中间段尾流气泡厚度为1.46 m,与经验公式的计算结果相符。

图13 实航尾流气泡声的反射信号Fig.13 Acoustic reflection signal of real wake bubbles
利用稳定尾流气泡时变较慢的实际情况,假设舰船尾流短时内为稳态结构,并结合多次重复测量数据,根据式(1)反演尾流气泡密度在探测频率下的变化曲线如图14所示。
激光全息技术研究表明,直径在10~15 µm之间,每 1 µm 宽度对应气泡的单位体积数量可达106个·m-3[17],尾流中半径为10~20 µm气泡的单位体积数量最高[18]。如图 14所示,本文湖上实航测试中,玻璃钢船尾流气泡起主要作用的气泡尺寸集中在 10~60 µm,实际测量获得的气泡单位体积数量分布略小于文献[17]中的结果,这与舰船的物理尺寸、航速,以及水声环境等因素相关。

图14 不同频率下的尾流气泡单位体积数量变化曲线图Fig.14 Variation of wake bubble density at different frequencies
4 结 论
当前,尾流自导鱼雷等水下武器进行实航验证测试时,多采用常规水面舰船模拟作战目标的方式进行实航验证,但水面舰船航行形成的尾流是否满足尾流自导鱼雷的需求,或者说该模拟尾流是否能替代真实作战目标对武器进行检验,成为了当前很难量化说明的问题,亦给尾流自导鱼雷的实航测试带来了不确定因素。
本文针对上述相关需求,采用基于ROV平台的移动式一体化测试方案,将声学探测设备集成在ROV上,设计ROV具备沉底静默与自主悬停两种工作模式,便于不同深度水域的试验测试。利用宽频带声脉冲对舰船尾流气泡进行连续测量,且声信号脉宽、周期等参数均可调整与设定,便于适应不同试验水域和不同测量目标。研制了基于上述方案的测试系统,利用刚性球壳进行水下目标散射强度测试,并开展了湖上实航试验,给出舰船尾流气泡声信号时域波形、散射目标强度、气泡单位体积数量分布等数据图形。测量结果表明该方案具备舰船尾流气泡声学探测能力,并与当前研究成果基本一致。
利用玻璃钢船在某湖试验测试,测量尾流气泡强度为21.6~21.8 dB,厚度为1.46 m,起主要作用的气泡尺寸集中在 10~60 µm。舰船尾流气泡的起始深度与舰船的吃水深度和螺旋桨深度相关,在小型舰船上,与螺旋桨的深度相关性更大;尾流深度在近程初始扩散区会迅速变大,达到最大深度后,会随着时间的增长逐渐减小。尾流的长度随时间线性增加,但在不同的海况下会有不同的测量值,需综合分析。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船电子工程(2021年6期)2021-06-28
舰船科学技术(2021年12期)2021-03-29
家庭影院技术(2020年6期)2020-07-27
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
雷达学报(2017年6期)2017-03-26
舰船科学技术(2016年1期)2016-02-27
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29