
多目标捕获算法的红外感应型汽车自动制动系统
2020-12-25 12:31李俊玲赵海波
机械设计与制造 2020年12期
李俊玲,赵海波
(1.沈阳城市建设学院交通与机械工程系,辽宁 沈阳 110167;2.沈阳理工大学机械工程学院,辽宁 沈阳 110000)
1 引言
随着人们经济水平的不断提高,驾驶车辆出行已成为当前重要的外出方式。车辆的不断增多,造成大量交通事故。对此,不断研究车辆制动系统,成为当前热点问题[1]。
制动指汽车在行驶途中偶遇突发紧急事件的情况下,驾驶员正确并迅速使用一系列制动装置,从而在最短距离内完全终止车辆前进趋势[2]。通常情况下,汽车可分为安装制动防抱死装置、未安装制动防抱死装置两大类。当遇到突发紧急情况时,安装制动防抱死装置的车辆驾驶员需要迅速抬起加速踏板,并立即猛踩制动踏板,保持不间断用力踩踏状态,与此同时踩下左脚的离合踏板,使汽车快速趋于静止状态;未安装制动防抱死装置的驾驶员也应迅速抬起加速踏板,同时用力踩踏制动踏板,配合点刹式制动行为,防止车轮陷入抱死状态,再选择合适时机踩下离合装置,避免车辆熄火。与常规制动不同,紧急式制动对汽车和轮胎均会造成损伤,受不一致制动条件影响,车辆可能会出现掉头、侧滑、摆头等情况,特别是在湿滑路面行驶过程中,更有可能直接造成机械元件损坏[3],从而引发严重的交通事故。对此,相关领域研究者对车辆制动系统进行了大量研究。
文献[4]提出汽车真空辅助制动系统设计。针对汽车真空辅助制动系统进行研究。利用模糊模式识别法对驾驶员制动意图进行分析,将其进行分类分为平稳制动,调节制动和紧急制动,研究空气流速对制动吸盘下落时间的影响,采用理论推导方式获得真空系统开启时刻控制方程式,并利用实验对该方程式进行经验修正。该控制系统为汽车真空辅助制动系统应用奠定基础,但该系统理论性较强,在多目标环境下,受到限制条件较多,延时性较差。文献[5]提出电动汽车复合制动防抱死系统设计。该系统建立液压与电机制动防抱死模型,根据路面附着系数大小设计出复合制动防抱死控制模式,根据路面附着系数大小设计复合制动防抱死控制模式,基于模糊PID 控制设计复合制动防抱死系统。该系统在不同附着系数路面,能够有效控制滑移率,缩短制动时间和距离,回收制动能量,但该系统无法提前对多目标出现后的异常情况进行判断,延时性高,导致事故发生的可能性较高。
基于上述问题的存在,设计了多目标捕获算法的红外感应型汽车自动制动系统。通过对红外感应型汽车自动制动系统的制动装置进行选择,采用红外感应对车辆行驶过程中出现的目标进行捕获,从而保证车辆能够在发现异常情况时,自动启动制动系统;并在该系统中设计了红外感应模块电路,用于识别多目标发出的红外线,进而确定目标等。仿真结果表明:系统可有效提高制动系统稳定性,且系统反应速度较快。
2 自动制动系统设计
2.1 制动装置的改进设计
红外感应型汽车自动制动系统的制动装置主要指盘式制动器[6]。盘式制动器的制动盘以垂直的方向设置在旋转元件之上,其两侧均存在接触表面。红外感应型汽车的盘式制动器两侧的元为盘片式刹车片。在制动时,当制动器两侧制动衬块收紧时,表面发生摩擦产生的摩擦力作用在制动盘上的摩擦转矩。其不仅应用在车轮制动上,也可应用在红外感应型汽车的中央制动器上。其内部结构,如图1 所示。
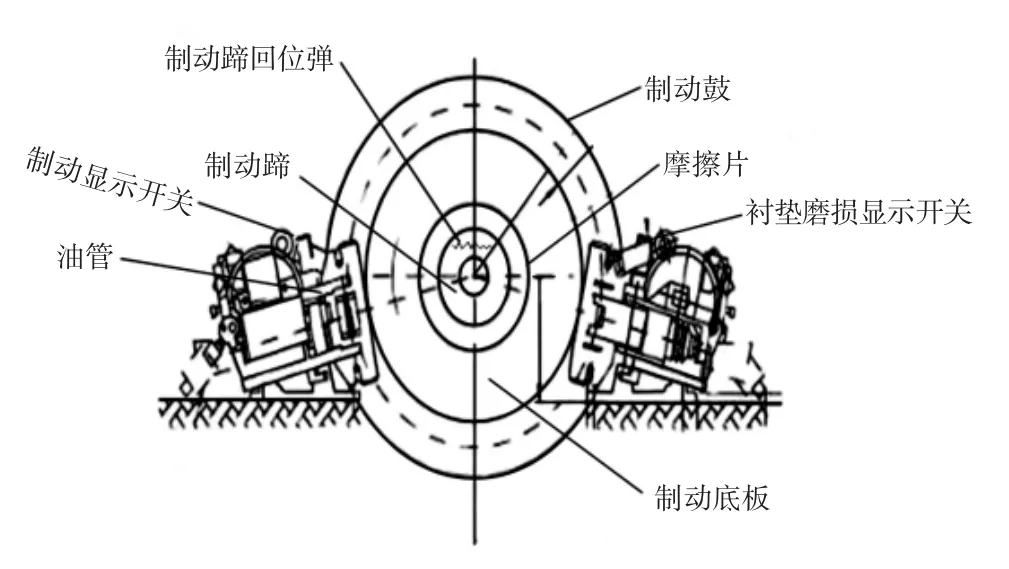
图1 盘式制动器内部结构图Fig.1 Internal Structure of Disc Brake
盘式制动器在车辆行驶紧急制动过程中,稳定性能较好,在高温情况下具有良好的制动性,响应时延较短,具有一定可靠性。在车辆行驶过程中,驾驶员能够看到的范围有限,常因驾驶角度问题发生交通事故。为了保证车辆的安全驾驶,设计的系统中采用红外感应对车辆行驶过程中出现的目标进行捕获,从而保证车辆能够在发现异常情况时,自动启动制动系统[7]。
2.2 制动器参数设置
当车辆行驶时,遇到障碍物自动制动时,要考虑制动器制动力的分配。针对红外感应型汽车摩擦衬片设置物理权限指标,其能够影响自动制动行为在系统中定向作用效果,达到控制片状结构体旋转角速度。在规定的刹车制动空间内,制动参数受到衬片摩擦系数、辅助权限效力的直接作用影响[8]。
衬片摩擦系数是红外感应型汽车车身所承载的标量物理条件,表示为ξ,随车辆行驶速度的改变,衬片的旋转速率也随之不断变化,从而导致角向角速度的上升或下降。在此情况下,摩擦系数的表现反应值虽然也会发生一定程度改变,但总体变化量不大,可以忽略不计。
辅助权限效力是与红外感应型汽车自动制动系统直接相关的物理作用条件,表示为D,在外界驾驶环境因素发生改变情况下,该项物理量始终保持匀速增大趋势,不受除汽车型号外任何物理量的作用影响。可将系统自动制动参数表示为:

式中:σ—紧急制动行为的最小判处数值;σ′—紧急制动行为的最大判处数值;s—红外感应型汽车的行为化制动处置参量;j—系统辅助处理权限。
2.3 制动助力器模型设计
在红外感应型汽车自动制动系统中,制动器工作时需要更大的制动力,故在系统中配置了制动助力器。助力器是红外感应型汽车自动制动系统中连接阀活塞推杆与摩擦衬片的必要物理元件,根据水平牵引力变化,更改设备头结构与中间柱身之间连接方式,降低制动吸盘旋转向心力实际效果[9]。
在不同行驶情况下,可借助汽车各种元件对加速踏板实施定向控制,缓解因过度制动对车体带来的物理伤害。常规的助力器模型不具备显著的应用实施环境,易导致加速踏板、制动踏板间出现不匹配行为。简化后的助力器模型可针对所有红外感应型车辆。协调各联动踏板间制动关系,抑制摩擦衬片出现不必要物理形变。常见制动助力器模型简化方法可总结为弹簧阻尼法、赫兹接触法、有限元法三大类,前两者制动效率相对较高,但严格限定了车体所承载牵引力数值范围,第三种方法的制动配合性最高,但总体实施流程相对复杂[10]。在三种简化方式的基础上,对助力器模型进行简化,简化后助力器模型,如图2 所示。
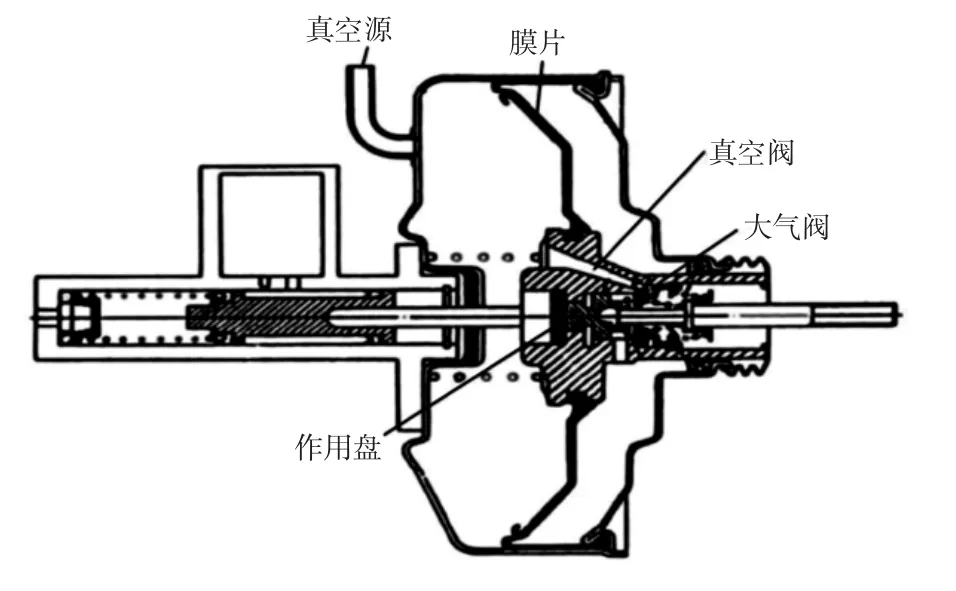
图2 简化后助力器内部结构示意图Fig.2 Simplified Internal Structure of Rear Booster
简化后助力器处于满负荷工作状态时,其真空阀门处于关闭状态,此时大气阀被打开,使其与外部连通,此时助理器中压力变大,当助力器中压力值达到最大时,助力器的助力值也达到了最大。但在车辆行驶过程中,制动器助理器也受到一定影响,分析不同工况下助力器的运行情况是自动制动系统的重要环节。
当助力器处于无真空状态时,此时助力器分两个步骤进行工作。首先,在车辆推力影响下,推杆可以避免推杆产生的回位弹簧预紧力的影响进行工作,直至和膜片座接触。故可得到助力器的动力学公式为:

式中:k1—推杆回位弹簧刚度;c1—推杆回位弹簧的阻尼。
在此基础上,推杆、膜片和底座回位弹簧预紧力同时工作,并与反作用盘接触,使其产生输出力。故可得到工作过程中推杆、膜片和膜底座的动力学公式为:

式中:k2—膜片座回位弹簧刚度;c2—膜片座回位弹簧阻尼。
2.4 红外接收电路和多目标捕获
为了保障红外感应型车辆运行过程中的安全性,在自动制动系统中设置了红外感应模块。红外感应型汽车自动制动系统中红外感应模块电路设计,如图3 所示。
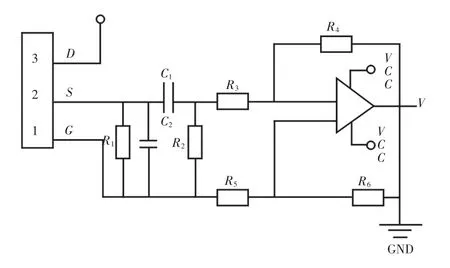
图3 红外感应型汽车红外感应模块电路设计Fig.3 Circuit Design of Infrared Induction Module of Infrared Induction Vehicle
红外感应型汽车自动制动系统中红外感应模块的工作原理,是由高电平信号控制实现。当多目标发出的红外线被该模块感应后,将此信息传输到系统中,在此情况下自动制动系统根据获取的多目标信号作出相应反应,对出现的障碍物多目标进行捕获。
假设存在的异常目标集合为N={n1,n2,n3…nm},在有限的二维方形栅格中γ={1,2,…ai}中捕获ai个异常目标b={b1,b2,…bai},捕获多个目标的时间为t∈T={1,2,…},t 时刻捕获到的多目标的位置为被捕获的多目标会随着时间变更,自身速度和位置发生改变,此时,需要对多目标的速度和位置进行计算,以获得更为准确的多目标位置。其速度和加速度为:

式中:vx—多目标横向移动速度;vy—多目标纵向移动速度;E—多目标运动路径的焦点距离;fp—多目标运动参数。
当红外感应型汽车自动制动系统捕获到可能会影响车辆正常行驶多目标时,制动系统将自动启动,实现车辆驾驶的安全。
3 仿真结果与分析
3.1 仿真环境
为验证这里系统的科学有效性,实验在Matlab 仿真平台上进行。采用SPSS 13.0 进行数据统计分析。将所设计系统应用于小型家用轿车中,模拟车辆驾驶实验环境,如图4 所示。

图4 模拟实验环境图Fig.4 Simulation Experiment Environment
3.2 实验参数
仿真参数设置,如表1 所示。

表1 仿真参数设计Tab.1 Design of Simulation Parameters
3.3 仿真结果分析
3.3.1 不同制动系统的运行稳定性分析
为了验证这里制动系统的有效性,实验分析了这里系统、汽车真空辅助制动系统以及电动汽车复合制动防抱死系统在自动自动时的稳定性,其中,制动系统的稳定性系数设置在(0~0.4)之间,且始终维持在一定范围内,波动较好的系统效果更好。实验结果,如图5 所示。
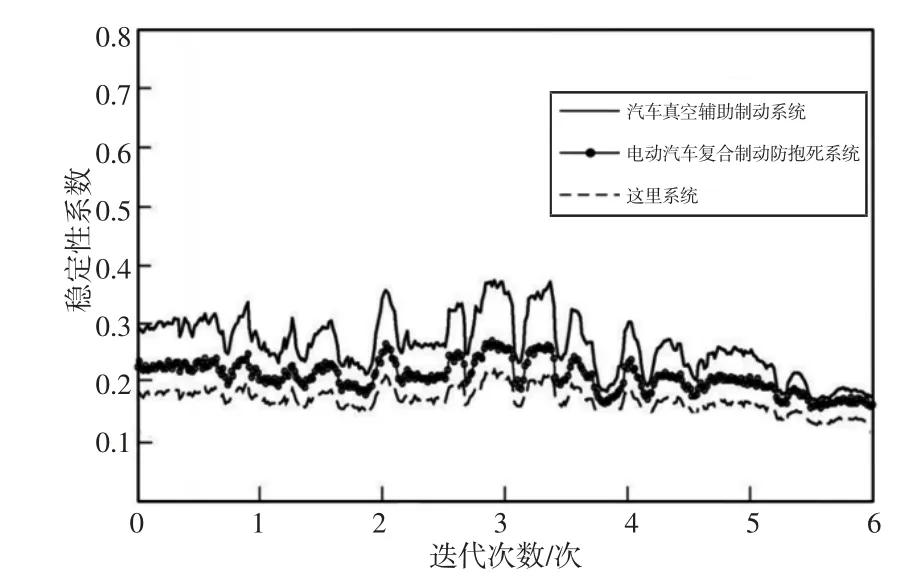
图5 不同制动系统运行稳定性对比Fig.5 Comparison of Operation Stability of Different Braking Systems
分析图5 可以看出,在相同工况条件下,三种系统运行的稳定性存在一定差距。其中,汽车真空辅助制动系统以及电动汽车复合制动防抱死系统的稳定系数在界定系数范围内,但两种系统随着迭代次数的增加出现了波动,导致系统稳定性较差,而这里系统的稳定系数波动较小,且始终保持在界定范围内。相比之下,这里系统的稳定性更高。这是由于这里系统在进行系统设计时对制动器参数进行设置,并简化了助力器,保证了系统运行的稳定性。
3.3.2 不同制动系统的响应时延分析
为了验证这里系统的可行性,实验分析了三种系统在遇到障碍物时制动系统的响应时延。其中,时延越短反应越快,证明系统性能更好。实验结果,如表2 所示。分析表2 中数据可看出,三种系统在相同实验条件下,系统响应时延不同。其中,这里系统在遇到障碍物时反应时延始终低于3s,而其他两种系统的响应时延较长,最长分别为5.2s 和5.4s。相比之下,这里系统响应时长分别提高了2.7s 和2.9s。这是由于这里系统在设计时考虑了红外感应模块的实现,可提前通过红外感应预测障碍物的位置以及运行速度,进而加快了制动系统的响应速度。
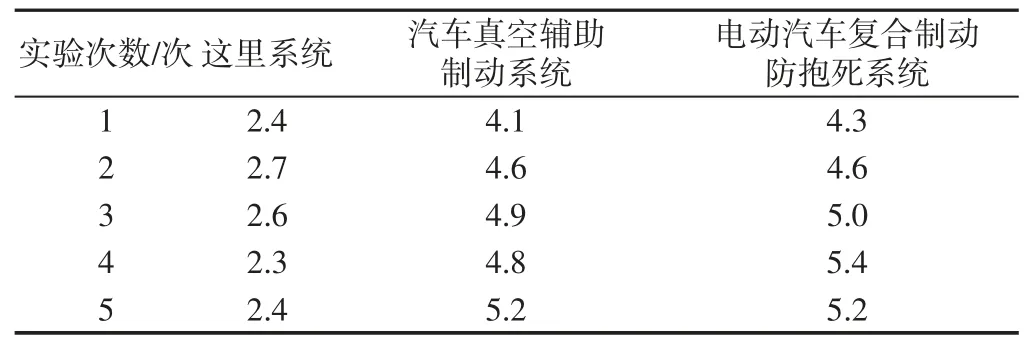
表2 不同制动系统响应时延分析(秒)Tab.2 Response Delay Analysis of Different Braking Systems(s)
3.3.3 不同制动系统多目标捕获效果分析
为了保证这里系统设计的可靠性,实验分析了三种系统对障碍物等多目标的获取。实验中,包括移动速度较快的样本目标50 个和速度想多较慢的样本目标50 个,采用三种系统对样本目标获取的效果,如图6 所示。
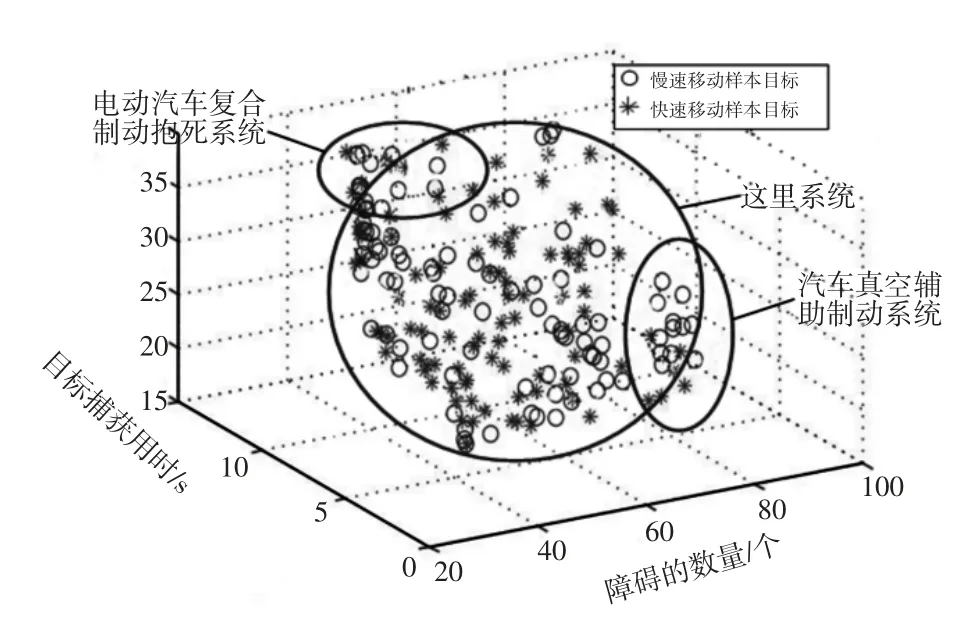
图6 不同制动系统多目标捕获效果对比Fig.6 Comparison of Multi-target Acquisition Effects of Different Braking Systems
分析图6 可看出,采用三种系统对样本目标进行捕获的效果存在一定差距。其中,这里系统的对样本目标的捕获数量较多,可达97%以上,而其他两种系统对样本目标的捕获较少,远低于这里系统。这是由于在进行制动系统设计时,这里系统考虑了障碍物的移动速度和加速度,进而可快速捕获样本目标。
4 结束语
这里设计基于多目标捕获算法的红外感应型汽车自动制动系统。该系统通过对自动制动系统中制动器的分析,并设置其参数,在系统中设计红外感应电路等,完成了多目标捕获算法的红外感应型汽车自动制动系统设计。仿真结果表明:所提系统在运行中稳定性能较好,且反应时延最短为2.3s,是一种新型汽车安全系统。
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
机电信息(2022年9期)2022-05-07
新技术新工艺(2022年1期)2022-03-04
通信电源技术(2020年8期)2020-07-21
中国特种设备安全(2019年3期)2019-04-22
电子制作(2019年23期)2019-02-23
科技与创新(2018年12期)2018-11-29
系统工程与电子技术(2016年7期)2016-08-21
现代防御技术(2016年1期)2016-06-01
西北工业大学学报(2015年3期)2015-12-14
