
柔性系统CMAC 神经网络和鲁棒H∞复合控制
2020-12-25 12:30付兴建于士贤
机械设计与制造 2020年12期
付兴建,于士贤
(北京信息科技大学自动化学院,北京100192)
1 引言
1975 年,Albus 提出一种模拟人类小脑结构和功能的小脑模型关节控制器(CMAC-CerebellarModelArticulationController)[1]。人类小脑负责人体运动的协调控制,它可以看作是一种函数,其功能是可以存储和检索产生协调动作的成千上万个肌肉控制信息。小脑模型设计目的就是实现机器人关节的协调控制,其本质是一种基于表格查询技术、局部连接的类感知器的联想记忆网络。现在对小脑模型神经控制的研究主要有两个方面。一是CMAC 神经网络自身性能研究,主要途径是通过与其他算法相结合以改善CMAC 结构、参数和学习能力[2-4];另一类是针对CMAC 的特点,将其与先进控制策略融合,进行混合控制研究[5-7]。目前,CMAC 在飞行器控制等许多方面得到了广泛应用[8-10]。
柔性机构提出于上世纪80 年代,目前在精密工程、仿生机器人等领域得到了广泛应用。同时由于柔性系统的自身特性,对其控制方式提出了更多的要求,对柔性系统的控制问题进行研究具有一定的理论和实际意义[12-14]。
针对高阶柔性直线系统的跟踪控制,设计了一种将GBFCMAC 神经网络与鲁棒H∞控制相复合的控制策略。首先,将跟踪控制问题转化为标准鲁棒控制,再利用Matlab 中LMI 工具箱求解控制器,然后将鲁棒H∞控制器与CMAC 神经网络复合,构成CMAC 神经网络鲁棒H∞控制。实验结果表明所设计的控制器不仅具有较快响应速度,较短的收敛时间和较好的跟踪精度,而且对于输入端扰动表现出较强的抗干扰能力。
2 高阶柔性直线系统
考虑某高阶柔性控制系统机械结构[15],如图1 所示。
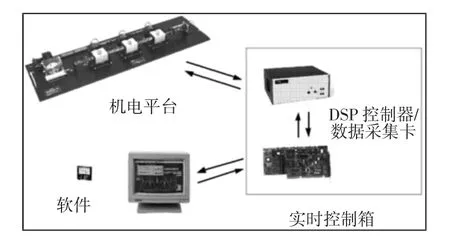
图1 高阶柔性结构系统平台Fig.1 High-order Flexible Structure System Platform
高阶柔性直线系统机电平台的运动部分结构,如图2 所示。
此高阶柔性直线系统状态方程:

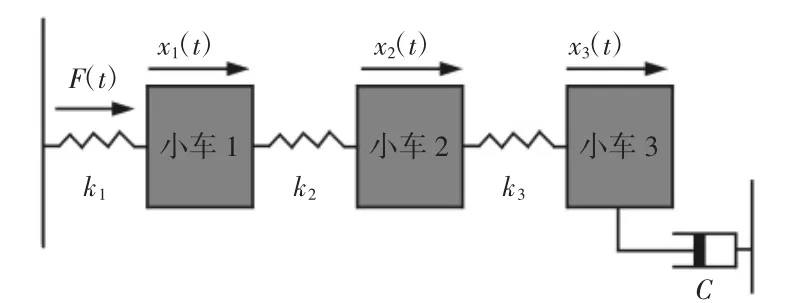
图2 运动部分结构图Fig.2 Motion Structure
加入输入端噪声w 后,状态方程可写为:

设备的参数如下:m1=2.77kg;m2=2.59kg;m3=2.59kg;k1=200N/m;k2=390N/m;k3=390N/m;c=10.2N/(m/s)。
3 鲁棒H∞控制及主要结论
标准H∞控制框图,如图3 所示。图中:w—外部输入信号,包括干扰等;z—输出信号,包括跟踪误差和扰动响应等;y—测量输出;u—控制信号;Δ(s)—不确定项;P(s)—对象;K(s)—控制器。
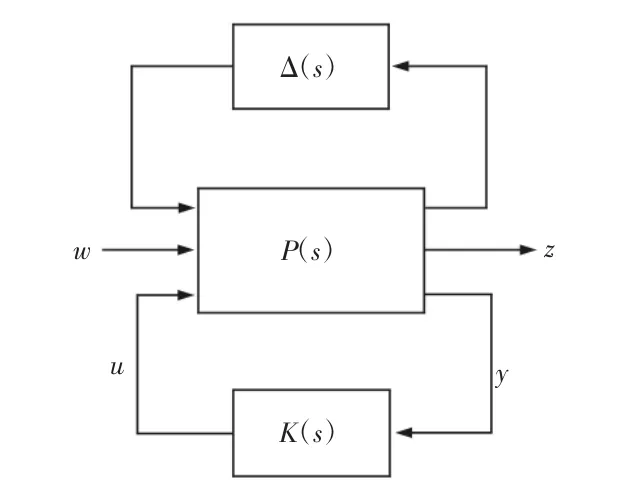
图3 标准H∞问题结构图Fig.3 Standard H∞Control Problem
鲁棒控制的目的就是要在不确定性Δ(s)存在下,针对广义对象P(s),设计控制器K(s),使得信号z 对外部输入w 的响应尽量小。假设广义对象可以化为的形式,如式(3)所示。

标准的H∞的状态方程为:

w 到z 的闭环传递函数矩阵为:

H∞次优控制问题,即求一个控制器u=Kx,使闭环系统内稳定且使‖Tzw(S)‖∞<γ γ≥γ0。
定理对于式(4)所示的线性系统,对于任意γ>0 如果存在对称正定矩阵X 和Y,使得式(6)成立,则控制器u=Kx=YX-1x 使系统渐近稳定且‖Tzw(S)‖∞<γ。
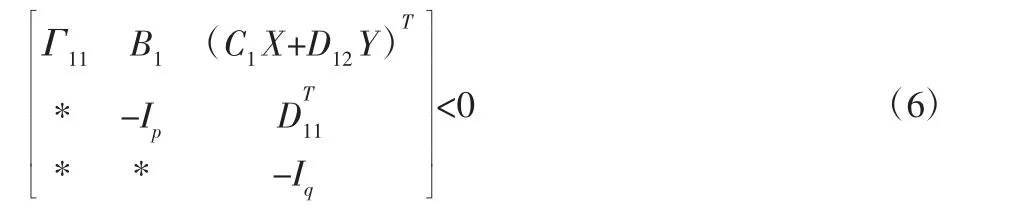
其中,Γ11=AX+B2Y+(AX+B2Y)T,*—对称转置。证明:略,可参考文献[14]。
4 CMAC 神经网络
由于CMAC 神经网络具有局部连接、收敛速度快和逼近精度高等优点,在控制领域(尤其是机器人控制系统中)得到广泛应用,CMAC 神经网络的算法也得到了多种方式的改进[12]。其中,Chiang 和Lin 将Albus 提出的CMAC 的常数型基函数推广到了一般类型的基函数,并引入了可微型基函数,使CMAC 具备了记忆微分信息的能力,如引入高斯基函数的GBF-CMAC(Gaussian Base function CMAC)即为其中一种。GBF-CMAC 神经网络映射原理,如图4 所示。
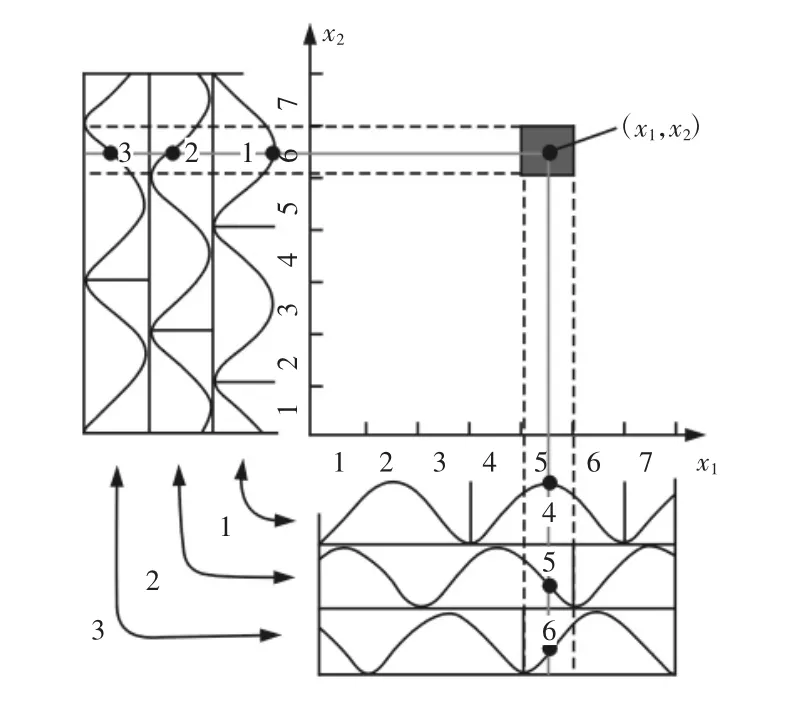
图4 GBF-CMAC 映射原理Fig.4 GBF-CMAC Mapping Principle
GBF-CMAC 在传统CMAC 映射中,增加一个基函数。基函数矩阵是对角矩阵,其对角线元素中有Ne个非零值,位置为pj,j=1,2,…,Ne计算,如式(7)所示。

式中:xI,k—输入向量的第k 维—输入向量第k 维对应的第j 层第个分块的高斯函数的中心和宽度。

式中:ij∈{1,2,…Nh|a(xs)相应位置为1},α∈(0,1)—学习率,其余权值不更新。
5 基于CMAC 神经网络的鲁棒H∞控制
针对高阶柔性直线系统,基于GBF-CMAC 神经网络的鲁棒H∞跟踪控制器结构,如图5 所示。控制器,如式(9)所示。

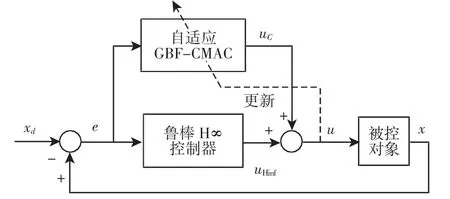
图5 复合跟踪控制系统结构图Fig.5 Compound Tracking Control System Structure
根据图5 和式(9)分析所设计的跟踪控制系统可知,初始阶段总控制输出主要为鲁棒控制器的输出uH∞(t),此时神经网络控制器处于学习阶段;随着神经网络的不断学习,总控制输出将主要由神经网络控制器提供,此时鲁棒控制器的主要作用是保证系统的稳定性。控制参数取时间T=5s,步长ΔT=0.003s。高阶柔性系统状态期望值为阶跃信号。输入端加入高斯白噪声作为干扰信号,由Simulink 的Band-Limited White Noise 模块产生。
CMAC 部分利用符号函数式将6 维输入变成3 维输入,结构参数和学习参数设置为Ne=5、Nb=3,22 和42、α=0.005 和U=3。
基于CMAC 神经网络,将文中定理得到的控制器与最优二次型控制器LQR 进行比较,令性能指标为dt,取Q=CTC,R=1,C=[0 0.02 0 0 1 0]T。利用Matlab 的LQR 函数工具,计算得到状态反馈控制向量为:

求解式(6)得鲁棒H∞控制器为:

在没有噪声和加入白噪声情况下,考查柔性运动结构中小车3 的位置跟踪效果,其误差曲线,如图6 所示。图6(a)是没有加入噪声干扰情况,可以看出所设计的复合跟踪控制器与传统最优二次型控制器相比,具有更快的响应速度和更短的收敛时间。加入白噪声干扰时,比如白噪声功率谱密度(Power spectrum density,PSD)值分别为0.1 和1 时,从图6(b)和图6(c)可以看出,传统的最优二次型控制器有振荡现象,且噪声越大震荡越剧烈,而设计的CMAC 神经网络和鲁棒控制相结合的复合控制在一定强度干扰下,控制效果几乎不受影响,表现出较强的抗干扰能力。
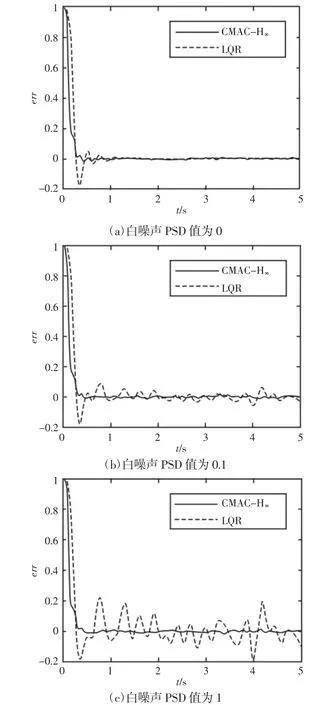
图6 跟踪误差曲线Fig.6 Tracking Error Curves
6 结语
针对具有高阶柔性机械结构系统,设计了将GBF-CMAC 神经网络与鲁棒H∞控制相融合的控制策略。通过将跟踪控制问题转化为标准的鲁棒控制问题,可利用Matlab 中的LMI 工具箱求解控制器参数。实验结果表明所设计的控制器不仅具有较快的响应速度,较短的收敛时间和较好的跟踪精度,而且对于输入端扰动表现出较强的抗干扰能力。
猜你喜欢
数学物理学报(2021年1期)2021-03-29
数学物理学报(2020年6期)2021-01-14
哈尔滨轴承(2020年1期)2020-11-03
北京航空航天大学学报(2019年9期)2019-10-26
制造技术与机床(2019年9期)2019-09-10
自动化学报(2019年6期)2019-07-23
自动化学报(2019年6期)2019-07-23
北京航空航天大学学报(2018年1期)2018-04-20
自动化学报(2017年4期)2017-06-15
北京航空航天大学学报(2016年7期)2016-11-16
