
基于专利分析的丰田无线充电技术研究
2020-12-25 03:28王军雷董昊旻王灿灿成梅林
汽车技术 2020年12期
王军雷 董昊旻 王灿灿 成梅林
(1.中国汽车技术研究中心有限公司,天津 300300;2.中国第一汽车股份有限公司研发总院,长春 130013)
主题词:丰田 无线充电 磁耦合 谐振 专利分析 技术布局
1 前言
汽车电动化在很多国家已经上升为国家战略,并实现快速发展。相对于电动汽车应用规模的快速扩张,充电基础设施建设则相对滞后。目前,电动汽车充电主要采用接触式充电,存在插电易磨损、不灵活和不安全等缺点[1]。在这种背景下,无线充电技术的应用场景逐渐从消费电子领域向电动汽车延伸。
无线充电技术是指通过电场、磁场、电磁波等物理场的耦合,将电能由供电设备传送至用电装置,并由该装置对电池充电,供其本身使用。根据无线电能传输原理,无线充电技术主要有4类:磁感应耦合式、磁耦合谐振式、微波辐射式、激光方式[2]。
由于汽车对充电功率需求较高、离地间隙较大等,汽车领域的无线充电技术更多停留在试验阶段。除了高通(Qualcomm)、WiTricity 等通讯科技公司致力于无线充电技术研发以外,以丰田、宝马等为代表的主流汽车厂商也早已开启无线充电技术的研发布局[3]。
其中,丰田在无线充电领域研发布局多年。2013年12 月,丰田核准了WiTricity 无线充电系统的知识产权,该系统由丰田与麻省理工学院联合开发,可提供“中距离”(线圈间的距离可从几厘米至几米不等)无线充电。2014 年2 月,丰田在日本爱知县内,利用3 辆普锐斯PHV,在1年时间内于用户住宅中进行无线充电系统验证试验。该系统可帮助插电式混合动力汽车(Plugin Hybrid Electric Vehicle,PHEV)和纯电动汽车(Electric Vehicle,EV)进行无线充电,而充满车辆电池组仅需90 min[4]。
本文采用专利分析方法,分析丰田在无线充电领域的专利技术布局和重点研发方向,梳理其在关键技术点的技术发展路线。
2 丰田无线充电技术专利分析
2.1 数据采集范围及相关说明
本文使用的专利检索数据库为中国汽车技术研究中心自主研发的全球汽车专利数据库,收录了全球104个国家1.3亿余条汽车及相关领域的专利,对全球汽车领域重要企业的专利按照技术领域、技术效果、技术手段3 个维度进行人工标引。在数据库的技术领域模块选取无线充电节点,并以“丰田or toyota”对申请人进行限定,检索截止日期为2019 年10 月31 日,检索得到丰田无线充电领域的相关专利。
2.2 专利申请趋势分析
截至2019年10月,在全球范围内,丰田在无线充电领域的相关专利申请共计1 003 件,合并同族后共计192项,其中中国专利共计186件。
如图1 所示,从专利层面来看,丰田在无线充电领域的技术研发起步于2007 年,之后专利申请量稳步增长,到2011 年专利申请量达到顶峰,高达240 件。2011年之后专利申请量几乎呈逐年下降趋势,且在2014 年上半年丰田进行无线充电系统试验后再无无线充电相关报道。对于丰田无线充电专利申请量下降的原因有以下3 点猜想:丰田在关键领域遇到技术瓶颈;与WiTricity 合作后,放弃某些领域的自主研发;全球电动汽车无线充电技术仍处于关键研发阶段,出于技术保密的考量进行技术封锁。

图1 丰田无线充电领域全球专利申请态势
2.3 专利技术构成分析
将丰田无线充电领域的186 件中国专利全部进行人工标引,标引后的专利总体技术布局如图2所示。由图2 可知,丰田无线充电领域的中国专利涉及功率传输、系统控制、辅助功能、通信交互等多个方面,其中,在线圈磁极机构、谐振补偿网络架构、通信交互、停车对位引导以及受电/供电装置整体结构设计方面专利储备量较大。近年来,丰田在线圈磁极机构设计、受电端与供电端的通信交互、恒压恒流控制方面研发投入较大,且开始关注动态无线充电系统研发,而在谐振补偿网络架构以及对位引导方面的开发逐渐削弱(见图3)。
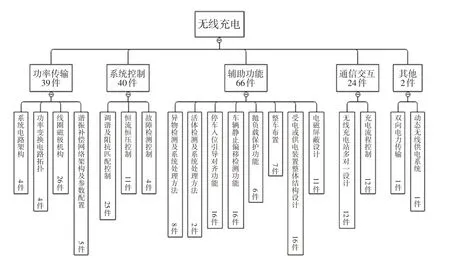
图2 丰田无线充电中国专利技术布局

图3 丰田无线充电技术研发趋势
2.4 关键技术点分析
丰田无线充电系统采用磁耦合谐振式无线电能传输技术,本文将重点研究丰田在线圈磁极机构设计、谐振补偿及调谐控制策略、异物检测技术、停车对位引导4 个方面的相关专利申请,通过阅读专利文献,梳理丰田在上述各技术点的改进路线。
2.4.1 线圈磁极机构设计
丰田在线圈磁极机构设计方面的中国专利共计26件,技术涉及绕组结构优化、磁芯结构优化以及线圈单元整体设计。
2.4.1.1 绕组结构优化
在绕组结构设计方面,丰田无线充电技术方案中既有采用平面环型线圈的方案,也有采用空间螺旋型线圈的方案。而对绕组结构的优化主要集中在针对平面环型线圈提高线圈错位容忍性和耦合系数方面。
为提高线圈间的错位容忍性,丰田公开号为CN103038089B 的专利提出一种线圈单元,如图4 所示。线圈单元101 包括次级谐振线圈110、次级电磁感应线圈120 以及设置在次级谐振线圈110 上的电容器115。次级谐振线圈110 包括多个单元线圈111、112、113 和114。单元线圈111~114 围绕次级谐振线圈110的假想中心线成环状地旋转对称布置。当发送线圈和接收线圈错位时,上述线圈设计也能保证较高的电力传输效率。

图4 线圈单元[5]
基于同样的技术思路,公开号为CN103222019B 的专利还提出一种线圈单元,如图5所示。第二自谐振线圈110包括第一线圈115和在第一线圈115内侧相互隔开间隔配置的多个第二线圈111、112、113、114,第一线圈115形成的磁场的方向与第二线圈111、112、113、114形成的磁场的方向相同。第一线圈115 和第二线圈111、112、113、114 为单匝线圈,且由1 根导线形成。第二线圈111、112、113、114以与第一线圈115的内周缘部内切的方式配置。

图5 线圈单元[6]
为提高耦合系数、减小装置尺寸,公开号为CN109204019A 的专利提出一种送电线圈,如图6 所示。送电线圈23包括第一线圈50、第二线圈51,以及二者的连接配线53。

图6 送电线圈立体图[7]
2.4.1.2 磁芯结构的优化
在磁芯结构优化方面,为实现在降低铁氧体用量的同时获得较高的耦合系数,公开号为CN106856357A的专利提出一种铁氧体结构,如图7所示。铁氧体22的外周缘部是多边形状,铁氧体22包括多个角部46,角部46相对于送电线圈12 的弯曲部40 向外伸出。在铁氧体22 的外周缘部划分出多个缺口部42,缺口部42 位于铁氧体22的角部46之间,并且缺口部42位于与相邻的弯曲部40间的中央部分重叠的位置,而且送电线圈12周向上的缺口部42 的宽度W1随着离开送电线圈12 的中空部37越远而越大。

图7 铁氧体平面图[8]
为实现热的均等化,减少磁能量的损失,公开号为CN108231384A 的专利提出一种线圈单元,如图8 所示。线圈单元320具备铁氧体磁芯321、322和与铁氧体磁芯321、322 相对向配置并具有多个弯曲部的线圈22L。各弯曲部22L1 夹着经过该弯曲部的曲率中心的虚拟直线L1卷绕。铁氧体磁芯包括与各弯曲部相对向配置的弯曲部铁氧体磁芯。在设虚拟直线延伸的方向为长度方向、设与虚拟直线正交的方向为宽度方向的情况下,弯曲部铁氧体磁芯被设置成在与线圈相对向的区域中磁通密度最高的区域的宽度比其他区域的宽度大。在上述线圈单元中,与线圈的弯曲部相对向的各弯曲部铁氧体磁芯构成为,通过使铁氧体磁芯的温度变高的区域的宽度大于其他区域,与发热的状况对应地分散热量。由此,将各弯曲部铁氧体磁芯作为整体进行观察,可实现热的均等化。其结果是,能够抑制各弯曲部铁氧体磁芯产生热梯度,减少热应力的产生。因此,能够使磁能量的损失减少。

图8 铁氧体磁芯321、322具体结构[9]
2.4.2 谐振补偿及调谐控制策略
丰田在谐振补偿及调谐控制策略方面的中国专利共计34 件,技术改进主要集中在送电线圈和受电线圈间的水平位置偏差以及垂直距离变化引起的频率失谐和阻抗失配方面。对此,丰田进行了一系列的技术改进,主要技术方案如图9所示。

图9 丰田阻抗匹配技术路线
2.4.3 异物检测技术
丰田在异物检测方面申请中国专利共计8件,其中4件专利处于有效状态。
在异物检测解决方案方面,丰田分别提出了基于温度传感器的温度检测和在受电部/送电部增设检测线圈的Q值(谐振电路的品质因素)检测方式。针对基于温度传感器的检测,改进点在于通过合理布置传感器减少所需传感器的数量以降低成本。针对增设检测线圈,改进点在于提高检测精度以及准确性。纵观丰田异物检测领域的技术方案可以发现,目前在受电部/送电部增设异物检测线圈是丰田异物检测的首选解决方案。
在现有的非接触电力传输系统中,使用线圈谐振电路的Q值的变化来检测存在于送电装置与受电装置之间的金属异物。Q值测定用的线圈可以独立设置,也可以使用送电线圈。而独立设置的情况下,也设计成具有与送电线圈同等的尺寸。然而,在车辆的非接触供电系统等大电力系统中,送电线圈也一定程度地大型化,导致无法检测到与送电线圈相比相对较小的异物。
为此,公开号为CN105281442B 的专利提出一种异物检测线圈,能够检测与送电/受电线圈相比相对较小的异物。参照图10,送电单元400包括送电线圈410、谐振电容器420、壳体430以及异物检测器460。送电线圈410 以及谐振电容器420 收纳在壳体430 内。壳体430包括屏蔽部432和盖部件434。异物检测器460包括多个第一线圈468 和多个第二线圈478,第一线圈468 和第二线圈478 设置于送电线圈410 的上方,例如可配设在壳体430的盖部件434的内面上。第二线圈478与第一线圈468对应地设置,且具有相同的大小和形状。各第二线圈478 与对应的第一线圈468 相对配置,一起构成线圈对,呈矩阵状配设在盖部件434的内面上。即多组线圈对沿着送电线圈410 的上面呈矩阵状配设在送电线圈410 的上方,各线圈对的外形较送电线圈410小。在送电单元400 与受电单元之间存在异物的情况下,利用这样尺寸的线圈对能够对无法通过受电线圈受电状态变化检测到的小异物进行检测。

图10 异物检测线圈[10]
丰田在上述异物检测线圈设计的基础上进行了进一步优化。考虑到电力传输时因异物检测器受磁场影响而导致异物检测结果不准确的问题,公开号为CN106232420B的专利提出在送电装置400中增设磁场检测器480和控制装置485,如图11所示。磁场检测器480检测磁场,控制装置接收异物检测器对异物的检测结果和磁场检测器对磁场的检测结果,控制装置在磁场的强度不高于规定值时的时间段基于由异物检测器执行的异物检测结果确定是否存在异物。由于磁场对异物检测器的影响在磁场强度不高于规定值的时间段内较小,故可以说获得了具有一定可靠性的异物检测的结果。

图11 异物检测系统[11]
此后,丰田考虑到在利用传感器进行非接触充电装置异物检测时,存储传感器输出的初始值(初始状态),基于检测值相对初始值的变化来判定异物的有无,若在初始值的测定时在送电装置与受电装置之间已经存在异物,则之后不会出现检测值相对初始值的变化,可能会判定为不存在异物。为此,公开号为CN108116253A 的专利提出一种异物检测系统,控制部在使用了传感器的异物检测开始前执行学习传感器检测结果初始状态的初始学习,使用初始状态与初始学习执行后的传感器的检测结果之差来判定异物的有无。在初始学习未被正常执行的情况下,控制送电部以抑制向受电部的送电。
2.4.4 停车对位引导
丰田在停车对位引导方面的中国专利共计16 件,技术方案思路基本一致,与泊车辅助系统配合使用。停车对位引导分为2个步骤:基于摄像头拍摄的图像信息进行停车入位;基于供电状态推定位置偏移距离,并据此进行车辆位置调整进而实现精准对位。
在上述方案的基础上,丰田进行了一系列的技术改进,如表1 所示。改进集中在第二阶段的精准对位,主要包括:考虑到车高变化对供电状态检测结果的干扰,增设高度传感器;为增强对准过程的可视化效果,通过送电单元与受电单元间的位置偏移量引起的受电单元中发光部的照度变化,或者在车辆显示单元上通过显示图形的尺寸、亮度、闪烁速率或者通过提示音的音量变化反映对准状况;为更便捷地实现送电单元和用电单元间的精准对位,在送电装置中设置多个第一线圈,基于受电装置的位置,从多个第一线圈中选择用于向受电装置送电的线圈;在受电装置中设置移动机构进行受电单元的位置移动,实现与送电单元的精准对位。

表1 丰田停车对位引导解决方案
值得注意的是,上述技术方案的提出集中在2014年以前,2014年起并无停车对位引导相关的专利申请。
公开号为CN102209647B 的专利披露了丰田停车对位引导的基础方案,参照图12 和图13,系统10 包括电动车辆100和供电设备200。电动车辆100包括受电单元110、摄像机120、通信部130 和控制装置180。受电单元110固定设置于车体底面。供电设备200包括电源装置210、送电单元220、多个标示送电单元220 的位置和方向的发光部230、通信部240。

图12 无线供电系统[12]

图13 电动汽车受电电路图[12]
在电动车辆100中,控制装置判定车辆的工作模式是否为充电模式(步骤S10)。当处于充电模式时,控制装置建立车辆的通信部130 与供电设备200 的通信部240 的通信,通过通信部130 向供电设备200 发送启动供电设备200的指令。接下来,控制装置接收到点亮要求时,通过通信部130 向供电设备200 发送点亮发光部230 的点亮指令。进而,控制装置通过通信部130 向供电设备200持续发送表示车辆正进行向送电单元220的引导控制的引导控制中信号,直到位置对准完成为止,在送电单元220接收到引导控制中信号时,ECU控制输出比充电时小的预先设定的电力。接下来,控制装置基于摄像机120拍摄到的多个发光部230的图像来识别车辆与送电单元220的位置关系(大致的距离和方向),输出控制指令,将车辆以适当的方式向送电单元220引导(第一引导控制)。当由于送电单元220 进入车体下部而无法通过摄像机120 拍摄送电单元220 时,控制装置输出控制指令结束第一引导控制(步骤S60)。此时,供电设备200的ECU经由通信部240向电动车辆100发送包含检测电压VS以及检测电流IS的各检测值的电力信息,控制装置根据预先制作的检测电压/检测电流与距离的映射关系推定送电单元220 与受电单元110 的距离,并基于距离的微分值判定二者的距离是否变为极小(步骤S80)。并且,在判定为距离很小时,控制装置控制车辆停车,使电动停车制动器工作(步骤S90),完成对位引导。上述停车对位引导系统可与智能泊车辅助系统配合使用,可在满足小型化的基础上实现精准停车。但该技术方案中并未公开基于摄像头拍摄的发光部图像识别车辆与送点单元位置关系的具体图像处理以及识别方法。
3 结束语
本文从专利申请态势、专利技术构成、关键技术点等方面剖析了丰田在无线充电领域的专利布局以及关键技术点的技术发展路线。
从丰田无线充电领域的中国专利布局来看,丰田在功率传输、系统控制、辅助功能、通信与交互等多个方面均有研发产出,其中功率传输、系统控制、辅助功能是其研发重点。功率传输方面,丰田主要针对线圈磁极机构进行了一系列结构优化,对绕组结构的优化主要集中在针对平面环型线圈提高线圈错位容忍性和耦合系数,磁芯结构的优化方案是在降低铁氧体量的同时获得高的耦合系数。辅助功能方面:丰田在停车入位引导领域的专利布局量较大,主要的技术方案为在基于摄像头拍摄的图像信息进行停车入位后,再基于供电状态信息推定位置偏移距离进行位置调整实现精准对位;在异物检测领域的解决方案主要包括基于温度传感器的温度检测和在受电部/送电部增设检测线圈Q值的检测方式,后续的技术方案主要是针对后者进行改进,因此,目前Q值检测方式是丰田异物检测的首选解决方案。丰田在谐振补偿及调谐控制策略领域的研发专利产出较为可观,其技术改进主要集中在送电线圈和受电线圈间的水平位置偏差以及垂直距离变化引起的频率失谐和阻抗失配。
基于专利申请态势分析发现,丰田近年来在无线充电领域的专利申请量逐年减少,且在2013 年以投资的方式与WiTricity 公司展开合作。通过专利技术构成分析发现,丰田在功率变换电路拓扑、谐振补偿网络架构及参数配置等核心技术点的专利量较少。可见,丰田在无线充电领域尚未取得核心关键技术突破,诸多技术难题有待攻克。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
防爆电机(2022年1期)2022-02-16
小雪花·成长指南(2021年6期)2021-08-18
电子技术与软件工程(2021年24期)2021-03-07
文萃报·周二版(2018年22期)2018-09-18
电机与控制学报(2018年9期)2018-05-14
卷宗(2017年1期)2017-03-17
中学物理·高中(2016年4期)2016-05-11
中小学实验与装备(2014年2期)2014-09-21
学苑创造·A版(2009年9期)2009-11-12
