圆柱阵多波束渔用声呐波束形成性能分析
2020-12-24 13:39宗艳梅李国栋谌志新唐学大尹项博汤涛林
渔业现代化 2020年6期
宗艳梅,李国栋,,谌志新,,唐学大,尹项博,汤涛林,
(1 青岛海洋科学与技术试点国家实验室,山东 青岛 266237;2中国水产科学研究院渔业机械仪器研究所,上海 200092)
为了获得更高的探测能力和空间分辨率,渔业声学探测技术向着多波束[1-2]、多频[3-4]和宽带[5-7]等技术方向快速发展。多波束渔用声呐作为海洋渔业精准、高效捕捞的重要水声助渔设备之一,在获取海洋渔业资源的丰度及数量等信息方面有着广泛的应用[8-10]。中国渔用声呐技术水平与世界先进水平相比,在鱼群高分辨率、远距离探测等诸多领域还存在着较大差距。近年来,随着微电子、新材料、新工艺以及信号处理技术的迅速发展,为研制智能鱼群识别、精准高效捕捞的高性能多波束渔用声呐带来了新的发展方向[7,11]。
换能器基阵的指向性是反映多波束渔用声呐探测性能的重要指标之一,圆柱型基阵在垂直和水平方向均具有指向性,且能实现空间全方位扫描,因此广泛应用于海洋渔业声呐系统中。但由于换能器阵各种元器件在结构、工艺上的误差并不是完全一致的,基阵中的每个通道也存在不一致性,导致信号通过每个阵元的输出存在一定幅度、相位和频移的偏差[12]。由于上述偏差的存在,影响到换能器阵的波束指向性,并降低多波束渔用声呐的探测性能。
本研究从多波束渔用声呐工作原理出发,建立256路稀疏圆柱阵的三维模型,对圆柱阵在垂直和水平方向波束形成进行仿真,重点研究阵元幅度偏移、相位偏移及频移和不同工作频点对圆柱阵垂直和水平方向波束形成性能的影响。
1 多波束渔用声呐基本原理
渔用声呐(探鱼仪)作为一种水下声波探测设备,实质是一种主动声呐系统,利用声波在水中的传播和遇到物体反射原理来探测水下目标并获取其距离、深度及数量等信息[13-14],其早期主要用于垂直探测渔船下方的鱼群目标。为不断扩大探测目标范围,提高探测效率,渔用声呐由单波束向多波束方向发展,其工作示意图如图1所示。
单波束是指声学基阵的自然方向图形成后,利用其在θ=0°方向上的极值点进行定向。由于单波束的波束宽度较小,若要搜索360°的水平空间,需要转动这个波束,因搜索整个空间速度太慢,导致探测效率低下[13]。多波束渔用声呐通过对发射信号的全向发射提高探测范围,对回波信号定向接收来准确定位鱼群位置,大大提高了鱼群探测效率[4-5,13]。多波束的形成是利用改变阵元间接收信号的时间差(τ)或补偿一定相位的方法,形成在某一方向上的极大值,基阵由多个扇区对应多个信号通道,空间可以形成多个极大值,即形成多个波束。多波束形成原理如图2所示。

图1 渔用声呐工作示意图
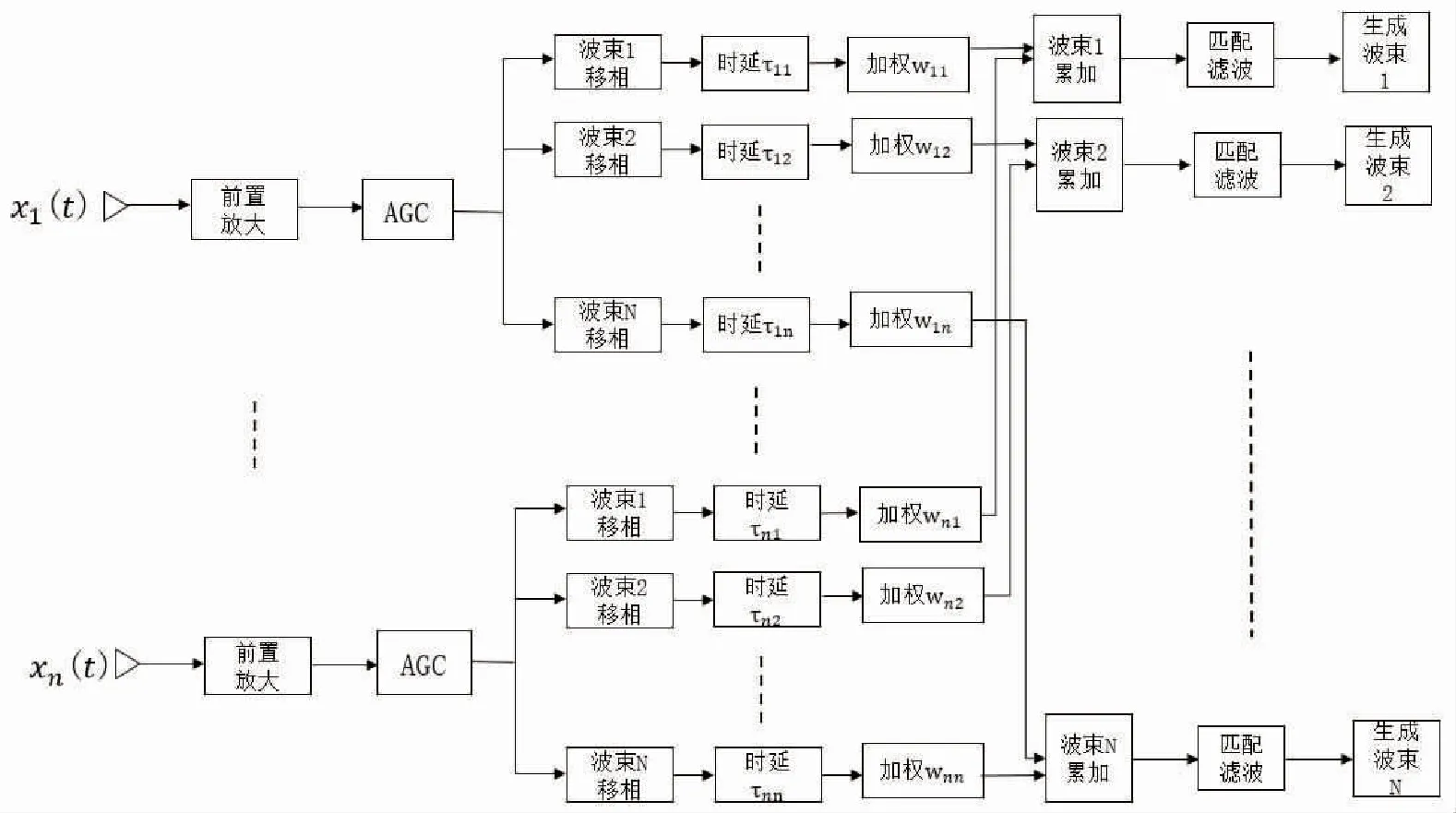
图2 多波束形成原理框图
多波束技术的发展为波束形成系统提供了360°全方位、实时跟踪的能力,同时,布阵方面进展也较快,基阵的几何形状由直线和圆发展到平面阵、圆柱阵及球形阵[15]。多波束渔用声呐采用圆柱型换能器布阵,可以实现以渔船为中心水平360°及垂直70°扫描。其发射采用基于电子扫描技术的扫描旋转定向发射,即在一个扇区内发射多个波束,然后水平旋转第二个扇区发射多个波束,保证不同方位角扇区都可以被扫描覆盖,同时采用多个阵元同步接收[15-17]。
2 圆柱多波束渔用声呐空间建模及波束形成
2.1 圆柱阵多波束渔用声呐空间建模
根据技术要求,圆柱阵多波束渔用声呐换能器采用纵向阵元错开排列方式,垂直方向上每列M个阵元,组成均匀线阵,共N列,水平方向每行N个阵元,组成均匀圆阵,共M行,共计256个阵元组成圆柱阵。其三维建模参数如下:垂直方向阵元数(M)为8个,水平方向阵元数(N)为32个,有效阵元数(L)为256个,圆柱阵高度(H)为0.357 m,垂直阵元间距(D)为0.042 m,圆柱阵直径(R)为0.370 m。为便于分析,以圆柱阵中心O为原点,建立如图3所示的坐标系。为更直观的分析基阵波束形成指向性,将圆柱阵分为8个虚拟扇区,取水平方向X轴正向左右各四列阵元为第一扇区,XOY平面逆时针旋转,向后旋转四列为第二扇区,即相邻扇区之间相差45°,且有四列阵元与前一个扇区重合,其扇区划分如图4所示。

图3 圆柱型离散阵坐标系

图4 圆柱阵扇区划分示意图
依此类推共将圆柱阵分为8个虚拟扇区,水平方向一个扇区包含8个阵元。以图3坐标系为参考,根据圆柱阵的布阵方式及上文三维建模参数建立256路圆柱阵三维模型,即水平方向32个阵元,垂直方向8个阵元,共计256路,如图5所示;第二扇区三维模型,即水平方向8个阵元,垂直方向8个阵元,一个扇区共计64路,如图6所示。以下研究均以第二扇区进行仿真分析。

图5 圆柱阵三维建模

图6 第二扇区三维建模
2.2 圆柱阵多波束渔用声呐波束形成算法
结合典型多波束渔用声呐和技术要求,圆柱阵波束形成仿真参数如下:目标强度为0 dB,工作频率为(20~30) kHz,中心频率为25 kHz,脉冲宽度为0.004 s,窄带信号带宽为0.25 kHz,声速为1 500 m/s,阵元开角为78°。
根据图3坐标系和圆柱阵三维建模参数及波束形成仿真参数,圆柱阵有效阵元个数为L,Hi表示第i个阵元,其直角坐标系坐标为(xi,yi,zi),球坐标为(θi,φi,γi),两者关系如下:
(1)
式中:xi,yi,zi分别为直角坐标系下第i个阵元在X轴、Y轴、Z轴的坐标,m;θi,φi,γi分别为球坐标系下第i个阵元的俯仰角、水平角及距离,m。
OHi与坐标Ox,Oy,Oz轴的夹角分别是αi,βi,ri,假定入射信号方向为(θ,φ),与Ox,Oy,Oz轴的夹角分别是α,β,γ,可推导出:

(2)
式中:θ为俯仰角;φ为水平角。
信号入射方向与向量OHi之夹角用δi来表示,可推导阵元Hi与参考点O的声程差为:
di=γicosδi=xicosα+yicosβ+zicosγ=xisinθcosφ+yisinθsinφ+zicosθ
(3)
对L个阵元求和,得到基阵空间指向性函数一般表达式:
(4)
式中:Ai为第i个阵元的加权值;Δζi=ζi-ζi0,ζi为相位差;ζi0为期望波束方位为(θ0,φ0)时,Hi信号应当被补偿的相位,其表达式如下:
(5)
式中:λ为波长,m;(θ,φ)为来波方向;(θ0,φ0)为期望方向。
由式(4)计算得到的指向性函数是一个二维函数,通常在某一个截面上观测。根据上述空间指向性函数的求解原理,运用乘积定理把圆柱阵空间指向性的计算简化为平面指向性的计算[7]。参照式(1)~(5)基阵空间指向性原理和波束形成仿真参数,根据技术要求,每个阵元开角78°,期望波束方向(θ0,φ0)为(90°,0°),对圆柱阵指向性进行仿真,得到圆柱阵第二扇区的空间指向波束图,如图7所示。
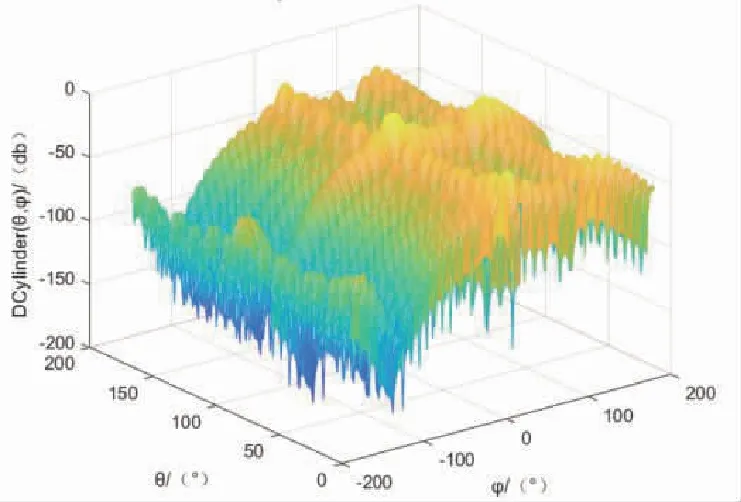
图7 圆柱阵第二扇区空间波束图
从图7可看出,圆柱型基阵在垂直和水平方向均具有指向性,波束主瓣方向为期望方向(θ0,φ0),为(90°,0°)。改变基阵指向方向可以使基阵波束主瓣出现在期望方向,加阵元指向后,旁瓣降低,第一旁瓣下降至-13 dB,主瓣指向性更突出。
3 圆柱阵多波束渔用声呐波束形成性能分析
3.1 幅度偏移对圆柱阵波束指向性影响性能分析
在幅度和相位偏移的研究中,一个常见的假设是误差可以用一个随机过程来描述,假定误差服从均匀分布或正态分布,用一个特征函数来表示幅度和相位的偏移量[18-21]。假定幅度偏移服从均匀分布,用特征函数δ表示标准幅度偏移量,分别研究不同幅度偏移下对波束指向性的影响。在圆柱阵第二扇区,垂直方向由相邻两列交错排布的16个阵元组成一个直线阵(如图8左),水平方向由相邻两行交错排布的8个阵元组成一个圆弧阵(如图8右)。
每个换能器阵元分别增加幅度偏移,分别仿真圆柱阵垂直和水平方向幅度偏移量系数为-20 dB、-10 dB、10 dB、20 dB时对第二扇区波束指向性的影响,仿真结果图9所示。
从图9可看出,幅度偏移对垂直和水平方向波束指向性主瓣略有影响,主瓣变宽,对旁瓣影响较大。为进一步分析幅度偏移对其第一旁瓣的增益影响,在幅度偏移量系数在-20~30 dB范围内进行多次迭代并取平均值,从仿真结果图10可看出,幅度偏移对圆柱阵垂直方向第一旁瓣影响较大,偏差在3 dB以上,在偏移量小于-15 dB时影响较大,可达6 dB以上;对水平方向第一旁瓣影响略小,当偏移量在-5~20 dB范围内时可控制第一旁瓣偏差在3 dB以内。
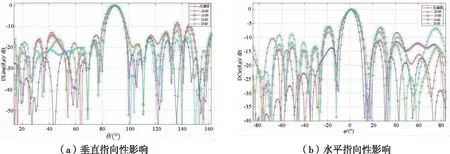
图9 幅度偏移对圆柱阵波束指向性影响

图10 幅度偏移对主瓣和旁瓣差影响
3.2 相位偏移对圆柱阵波束指向性影响性能分析
假定相位偏移服从均匀分布,用特征函数ζ表示标准相位偏移量[22-23],每个换能器阵元在垂直和水平方向分别增加相位偏移,分别仿真圆柱阵垂直和水平方向相位偏移量系数为-20 dB、-10 dB、10 dB、20 dB时对第二扇区波束指向性的影响。仿真结果如图11所示。
从图11可看出,相位偏移对垂直和水平方向波束指向性主瓣略有影响,旁瓣影响较大,主瓣变宽,旁瓣增大。为进一步分析相位偏移对其第一旁瓣增益影响,对相位偏移系数在-20~30 dB范围内进行多次迭代并取平均值,仿真结果如图12所示。
从图12可看出,相位偏移对圆柱阵第一旁瓣影响较大,偏移量在-5~15 dB范围内时第一旁瓣偏差在3 dB左右,超出此范围,偏差可达3 dB以上。

图11 相位偏移对圆柱阵波束指向性影响
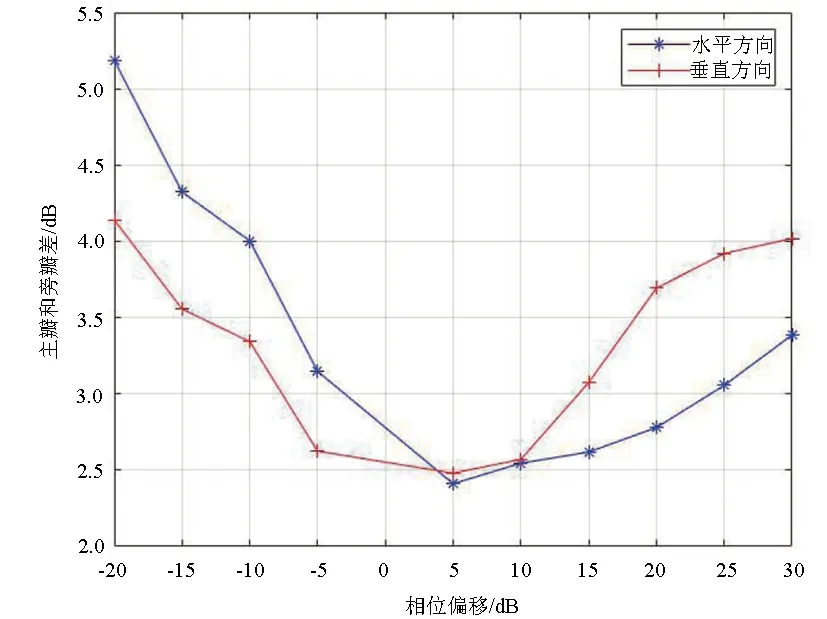
图12 相位偏移对主瓣和旁瓣差影响
3.3 频移对圆柱阵波束指向性影响性能分析
圆柱阵多波束渔用声呐的指向性除了会受到幅度和相位偏移的影响,通常与工作频率的选取也有很大关系。为了获得最佳的波束指向性,选择频率时要考虑探测距离、目标大小、搜索范围及目标自身的反射强度(目标强度)[24-25]等多方面因素,这就要求根据给定的技术指标,选择最佳频率。对于一般近程小目标(如探鱼声呐),频率一般可取几十千赫到几百千赫[24]。根据技术要求,文中分析了(20~30) kHz范围内共计11个工作频点下单个频点对圆柱阵垂直和水平方向波束指向性的影响。
通过仿真可知工作频点对波束指向性有较大影响,尤其对主瓣宽度及旁瓣均有影响。为进一步分析频点对主瓣宽度影响,对(20~30) kHz频点下进行仿真,仿真结果如图13所示。

图13 工作频点对圆柱阵指向性主瓣宽度影响
从图13中可以看出,圆柱阵垂直和水平方向波束宽度都随着频率的增大而逐渐减小,垂直方向频点为20 kHz时主瓣宽度为10.72°,水平方向频点为20 kHz时主瓣宽度约为11.72°,频点在(20~30)kHz之间变化时,垂直方向主瓣宽度约偏移3.5°,水平方向约偏移3.9°。研究结果表明,圆柱阵垂直和水平方向的主瓣宽度随中心频率增大而变小,但在实际的海洋传输信道上,由于存在复杂的波导效应,最佳频率并不是越低越好,还要根据海区水深、海底类型以及探测目标等多种因素综合考虑[24]。
由于振动源与目标之间有相对运动,换能器基阵所收到的声波频率与振动源的频率会有所偏移,即多普勒频移。在渔用声呐实际工作时是随船而运动的,所以声源的速度就是船速,根据多普勒效应原理,渔用声呐实际接收到的回波频率为:
(6)
实际C>>u、C>>v,得多普勒频移为:
(7)
式中:f为声源振动频率,Hz;u为声源移动速度,m/s:v为目标移动速度,m/s;C为海水声速,m/s。
实际海洋探测中,船速与信号发射方向间有一个夹角(θ)存在,在鱼群跟踪时,θ在不断变化,因此Δf也是随探测角而变化。通常多普勒频移只占探测频率的1%左右,根据式(6)~(7),分析频点为25 kHz时频移对圆柱阵波束形成的影响,仿真结果如图14所示。
从图14可以看出,频移控制在1%以内,对圆柱阵垂直和水平方向波束指向性影响较小,旁瓣约有1~3 dB变化,主瓣影响很小。现代电子技术已能从微小的多普勒频移中推求出鱼群移动速度的大小和方向,因此在混响环境中可利用多普勒频移来提高目标的检测能力。
综上所述,圆柱阵多波束渔用声呐探测性能受波束形成系统的影响,而波束形成系统作为其核心部件,性能又受到幅度、相位偏移和频移等多方面因素的影响。其中,幅度和相位偏移对圆柱阵波束主瓣和旁瓣影响较大,应控制幅度、相位偏移在一定范围内,尽可能缩小其偏移对圆柱阵指向性的影响。偏移过大会导致圆柱阵指向性主瓣变宽、旁瓣增大,从而导致基阵指向性变差、分辨率降低。工作在不同频点下,波束主瓣宽度影响较大,频移对波束指向性影响较小。因此,选择最优的频率,并从幅度和相位偏移对波束指向性角度考虑,将幅度、相位偏移控制在一定范围内,将有益于提升圆柱阵多波束渔用声呐探测性能。

图14 频移对圆柱阵波束指向性影响
4 结论
在不同影响条件下对圆柱阵多波束渔用声呐波束形成性能的仿真分析发现,其波束指向性受到阵元幅度偏移、相位偏移及频移等多方面因素综合影响。幅度和相位偏移对圆柱阵波束指向性影响较大,其波束指向性主瓣变宽,旁瓣变大,频移对其波束指向性影响较小;频点对波束主瓣影响较大。因此,提升圆柱阵多波束渔用声呐探测性能,应综合考虑波束形成系统幅度、相位偏移及频移等因素,根据不同探测环境调整渔用声呐的技术参数指标,以提升圆柱阵多波束渔用声呐探测性能。
猜你喜欢
系统工程与电子技术(2022年11期)2022-10-29
舰船科学技术(2022年11期)2022-07-15
南北桥(2022年2期)2022-05-31
海军航空大学学报(2020年2期)2020-07-27
人大建设(2018年11期)2019-01-31
航空学报(2018年12期)2019-01-18
水下无人系统学报(2018年5期)2018-11-09
电脑知识与技术·经验技巧(2017年9期)2018-02-24
电子技术与软件工程(2017年12期)2017-07-05
考试周刊(2016年69期)2016-09-21