
直径限定可靠性计算的冗余边的检测算法
2020-12-23 06:30熊祥军邵方明张祖渊管建民
华东理工大学学报(自然科学版) 2020年6期
熊祥军, 邵方明, 张祖渊, 管建民
(1. 华东理工大学理学院,上海 200237;2. 长春财经学院数学系,长春 130122)
经典的二终端网络可靠性是指源节点s 和终端节点t 之间存在至少一个操作路径的概率,但是不考虑对st-路长度的限制。通过限制所有st-路的长度不超过给定正整数D,Petingi 等[1]最初将直径限制引入网络可靠性(DCR)。Cancela 等[2]研究了通信网络的直径限制可靠性模型,并提出了一种多项式时间算法,用于检测和删除冗余边,以计算具有直径限制的简单无向图的二终端可靠性。在DCR 模型中,检测冗余边的必要条件尚未得到解决。此外,文献[3]中做了进一步的工作。文献[4]中将s,K-直径定义为源节点s 与K 中任意节点之间的最大距离,使用控制以提出一种简单的方法来计算s,K-直径不大于给定值D 时的可靠性。然而,检测冗余边的必要条件仍然是一个悬而未决的问题。
计算二终端可靠性的问题是NP-难的问题。因子分解算法[5]是评估可靠性的有效方法。通过使用这种算法,Cancela 等[2]研究了文献[6]中网络的结果,这些结果也用于本文。
多项式时间拓扑归约在直径限制可靠性的计算中起重要作用,因为许多冗余边能够被删除并且可靠性保持不变。然而,以往对冗余边的研究并不全面。检测冗余边的必要条件是所谓的开放问题。在本文中,我们基于文献[7]定义路径长度的新度量方法,将 st-路径分类为实际路径(RP),伪路径(PP),组合路径(CP),包含特定边的最短 st-路径(SPE)并明确指出通过测量PP、RP 和CP 可以得出SPE 的长度。此外,我们提出了一种检测隐藏冗余边的算法,该算法的复杂度是多项式的(O(n4))。
1 系统模型和冗余边问题
1.1 系统模型
通信网络可以通过概率图G(V,E)在数学上建模,其中V 是节点集合,E 是边的集合。每个节点v∈V 是完全可靠的,而每个边e∈E 独立地失效并且与操作概率pe(失效概率qe=1-pe)相关联。图1 示出了具有节点集 V={s,a,b,c,d,t}的通信网络 G,其中源节点和终端节点分别是 s、t,边集 E={e1,e2,...,e11}。
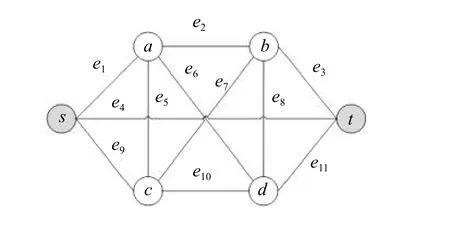
图 1 通讯网络G (V, E)Fig. 1 Communication network G (V, E)
定义 1[1]:由 Rst(G)表示的st 可靠性是指源点s 和汇点t 之间至少存在一条连通路径的概率。
文献[5]提出了因子分解算法来计算st 可靠性,这被认为是NP-难问题。可靠性计算的因子定理:
1.2 直径限制二终端可靠性
定义3:直径限制下的二终端可靠性是指至少存在一条长度小于D 的st 路径,记为Rst(G, D)。
通过因子分解定理计算:
值得注意的是,收缩边e 得到图 G *e 的过程可能会使原来经过边e 的长度为D+1 的路的长度减少到D,从而导致计算Rst( G *e , D)时将多余的路径计算在内的情况。因此,我们设定固定边e 的状态为1 并保留边e 在图中的位置不变。
1.3 冗余边问题
Petingi 等[3]提出检测冗余边的充分条件。
命题1:e=uv 是存在于图G 某个st-路上的边。如果 dG-e(s, u)+dG-e(v, t)≥D 和 dG-e(s, v)+dG-e(u, t)≥D,则边e 是冗余边。
与[2]中结果相比,命题1 可以被认为是路径长度的新的度量方法,但它仍然不能完全找到冗余边。比如在图2 中,给定D=5,冗余边e=bc。从命题1,dG-e(s, b)+dG-e(c, t)=4<D 并 且 dG-e(s, c)+dG-e(b, t)=4<D可知e=bc 并非冗余边。
造成这种现象的原因是该度量仅考虑路径长度,但忽略了从源点s 到点u 和点v 到汇点t(从s 到v 和u 到t)的路径的具体信息以及路径的组合是否包含给定边uv。因此dG-e(s, u)+dG-e(v, t) 和 dG-e(s, v)+dG-e(u, t)的度量仍然需要进一步改进。

图 2 无法用命题1 判断冗余边的拓扑结构Fig. 2 Topology structure with irrelevant edges not identified by Proposition 1
2 检测冗余边的分析和算法
2.1 冗余边的分析
设定 P1, P2, …, Pm都为包含边 e 的 st-路,
定理 1:如果 min1≤i≤m|Pi|>D,则 e 为不相关边。
显 而 易 见 ,min1≤i≤m|Pi|>D 意 味 着 所 有 包 含 边e 的st-路径的长度大于D,因此边e 必然为冗余边。反之,如果边e 为冗余边,则所有包含边e 的st-路径的长度大于 D,例如,min1≤i≤m|Pi|>D。
为了更有效地检测冗余边,我们考虑包含边e(SPE)的最短 st-路径[3]。如果找到 SPE,则肯定会完全检测到所有冗余边。但是,Petingi 等[3]证明找到SPE 的问题是NP-难的。我们希望在多项式时间内找到接近SPE 长度的值,并使用该值与D 进行比较以确定冗余边。
对于节点 x,y,Px,y表示从 x 到 y 的最短路径之一。对于边 e=uv,我们称 Ps,u∪(u, v)∪Pv,t和 Ps,v∪(v, u)∪Pu,t分别为 u,v-path 和 v,u-path。为方便起见,我们只讨论如何处理 u,v-paths 并对 v,u-paths 进行相同的操作。
推论1:包含边uv 的最短路径然必然是包含u,v-paths 和 v,u-paths 中最短的路径。


图 3 RP 和 CP 的示例Fig. 3 An example for RP and CP

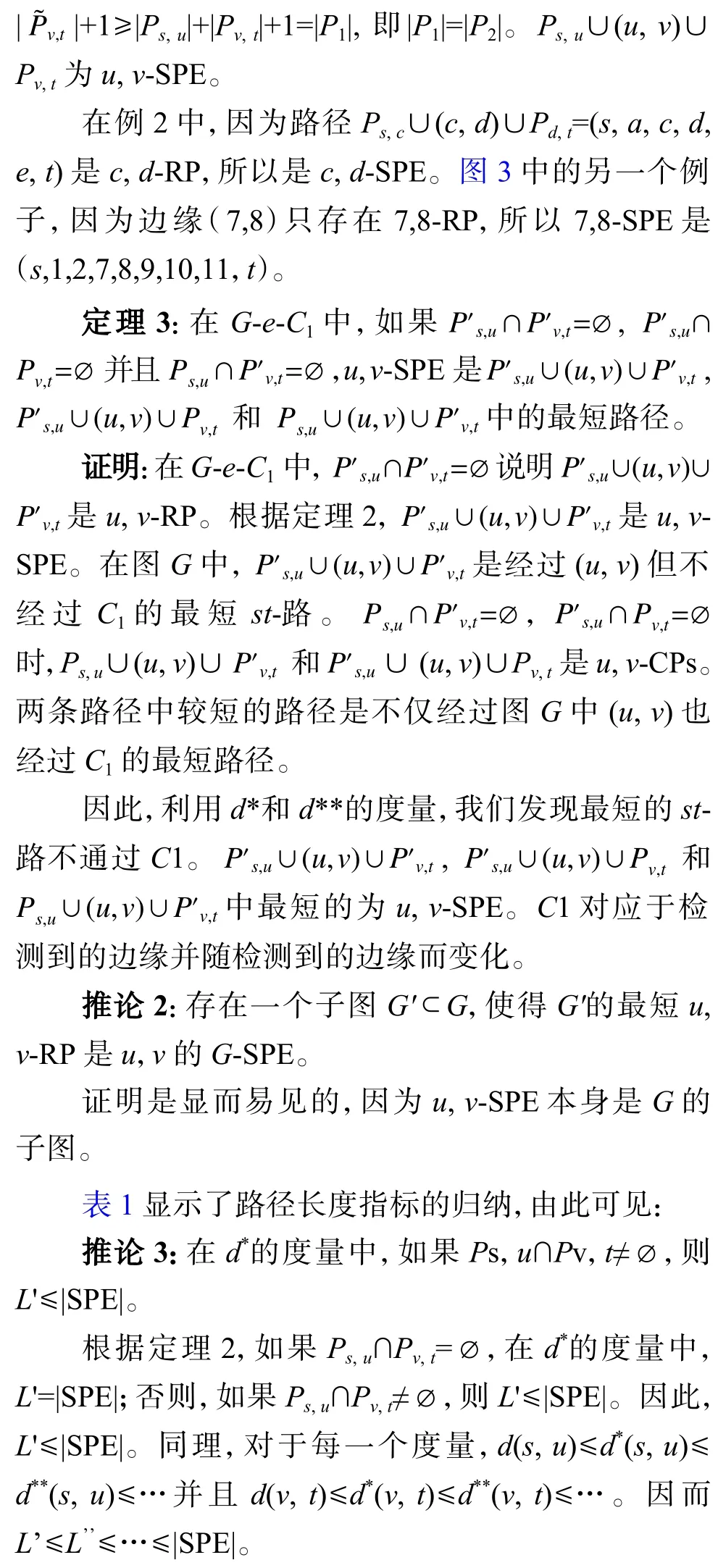
在图4 中,可以看到每个步骤都对上一步进行进一步度量。事实上,检测所有冗余边是基于SPE 的值,而不是SPE 本身。在我们的算法设计中,我们并没有尝试寻找SPE,而是使用SPE 的长度或其近似值。
以上分析侧重于有向边 (u, v)。对于边(v,u),操作是相同的。不可否认,存在最短路径不唯一的情况,实际上这并不会影响冗余边的检测,因为PP,RP 和CP 重复检查两个节点之间的最短路径。更明确地,如果通过删除Ck损坏了最短路径之一,则度量将测量其他最短路径。

表 1 路径长度的度量标准Table 1 Metrics of path lengths
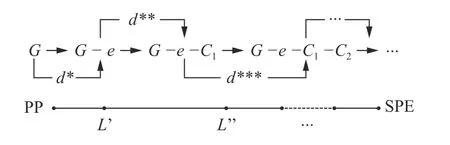
图 4 从 PP 到 SPE 的长度Fig. 4 Length matric from PP to SPE
2.2 检测冗余边的算法


将归约过程整合到因子分解定理中,我们得到可靠性计算程序(RCP):
输入:G (V, E),源点 s,汇点 t,p,直径限制 D
输出:Rst(G, D)
步1:如果G 直径小于或等于D,执行步3;否则执行步2;
步2:执行NRP 以获得新网络G0;
步3:在G0中随机选择边e;
步4:递归计算Rst(G*e, D);
步5:递归计算Rst(G-e, D);
步 6:Rst(G, D)=pRst(G*e, D)+qRst(G-e, D)。
复杂性分析:文献 [8]表明,对于 D=2,Rst(G,D)可以在多项式时间内确定,并且计算D, D≥3 的固定值的Rst(G, D)是NP-难问题。
3 实例分析
在本节中,我们将说明检测冗余边的不同拓扑,并显示Petingi 算法与我们算法之间的比较。图5 说明了 4 个图:5(a)循环 C [6]; 5(b)Arpanet [6]; 5(c)欧洲光网络[6]; 5(d)加齐大学网络[6]。该算法被编码为 MATLAB 程序,并在 PC(Intel Core i5; 2 450 M;2.5 GHz CPU)上实现。
表2 显示了所提算法和Petingi 算法[2]之间冗余边数和CPU 时间的比较,其中,*IE1, T1分别为本文算法的冗余边数量和 CPU 时间;IE2, T2分别为Petingi 算法冗余边数量和 CPU 时间[2];T:未减少计算可靠性的CPU 时间。当D=3 时,在图5(a)中检测到两个冗余边,并且CPU 时间节省0.007 6 s。当D=5 时,我们在图 5(b)中找到两个冗余边,CPU 时间节省4.439 s。在许多例中,通过使用我们的算法可以完全找到冗余边。通常,冗余边的数量与直径限制 D 密切相关。例如,在图 5(c)和表 2 中,D 越小,冗余边越多,CPU 时间越少。当D<7 时,我们的算法检测到的冗余边比Petingi 算法更多。然而,当D=7 时,Petingi 算法的冗余边数与我们的相同,并且CPU 时间相近。
表3 显示了我们的算法和Petingi 算法之间冗余边数和CPU 时间的比较,其中,IE1, T1分别为本文算 法 的 冗 余 边 数 量 和 CPU 时 间;IE2,T2分 别 为Petingi 算法冗余边数量和CPU 时间[2]。总的来讲,Petingi 的算法和我们的算法都能有效地检测不相关的边缘。如果D 的值太小,则Peting 的算法更快,因为相关边的数量很小。例如,由于网络没有长度为3,4 和5 的路径,因此在D=2,3 的网络中有20 个冗余边(只有边s1 和1t 是相关的)。但是,我们的算法的优点在D=4, 5, 6, 7 和8 时通过事实凸显出来,结果见图6。原因是我们的算法能够在检测冗余边时清楚地找到PP,从而找到最内部冗余边。因此,计算可靠性的相应CPU 时间进一步减少。最后,从s 到t 的最大距离是9,此时,我们的算法和Petingi 算法的CPU 时间接近。
图 5 拓扑示意图Fig. 5 Illustration of four topologies

表 2 数值结果(p=0.9)Table 2 Numerical results with p = 0.9

表 3 冗余边的检测及可靠性计算时间(p=0.9)Table 3 Detection of irrelevant edges and computation of reliability for p = 0.9

图 6 比较不同D 值的示意图Fig. 6 An illustration for comparison of different values of D
4 结 论
我们在检测直径限制可靠性的冗余边方面做了进一步的工作。提出的一些路径长度度量来改进检测隐藏的冗余边的方法。实例分析结果表明所提出的算法能够在多项式时间(O(n4))中识别更多冗余边。
猜你喜欢
上海文化(文化研究)(2022年3期)2022-06-28
艺术家(2021年10期)2021-12-20
小学生学习指导(高年级)(2021年10期)2021-11-02
小学生学习指导(低年级)(2020年10期)2020-11-26
数学小灵通(1-2年级)(2020年9期)2020-10-27
五邑大学学报(自然科学版)(2019年3期)2019-09-06
云南档案(2019年7期)2019-08-06
江西教育B(2019年2期)2019-04-12
中国诗歌(2018年6期)2018-11-14
小天使·六年级语数英综合(2018年1期)2018-10-08
