
基于PMAC的倾角传感器动态校准装置
2020-12-15 11:18李娜娜
仪表技术与传感器 2020年11期
李娜娜,彭 军
(北京长城计量测试技术研究所,北京 100095)
0 引言
倾角传感器是测量关于水平面的倾斜角的装置,具有结构简单、可靠性高、使用通用传感器集成电路等优点。目前动态倾角传感器应用越来越广泛,例如机器人行走时倾角和腿部关节姿态的获取;卫星通讯车在运行过程中俯仰方向或横滚方向存在高频抖动时;船舶航行时姿态角的测量,雷达车辆平台检测等都用到了动态倾角传感器的实时测量功能。但是倾角传感器在实际使用中往往存在较大的非线性误差和温度漂移误差等缺陷,以致精度易受影响从而导致测量误差过大[1-2],因此研究倾角传感器的静态和动态特性非常重要。目前国内对倾角传感器的校准主要集中在静态方面[3-4],动态方面的校准研究比较少。
为解决倾角传感器动态校准的问题,本文介绍了一种基于PMAC卡的倾角传感器动态校准装置,并对其控制系统方案进行了设计,最后通过校准装置的动态试验和传感器的校准试验,验证该控制系统可以实现对倾角传感器的动态校准。
1 倾角传感器动态校准装置工作原理
装置结构示意图如图1所示,装置台体部分主要由主轴、台面、空气轴承、光栅和电机组成,空气静压轴系由于气膜产生的均化效应,不仅可得到较高的回转精度,而且摩擦小,运行平稳。无刷永磁电机作为驱动元件,其转子直接安装在旋转轴上,定子安装在壳体上。采用高准确度的光栅元件作为测量元件,光栅盘安装在旋转轴上,随轴可360°旋转,读数头则安装在相对静止的壳体上,台面开有螺纹孔,用来安装被校传感器。
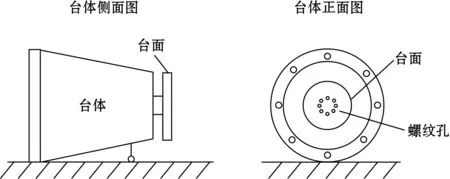
图1 校准装置示意图
校准装置工作原理如图2所示。校准时将倾角传感器的固定在台面上,通过上位机控制,给定装置不同频率下的正弦激励信号,使传感器跟随转台做正弦角振动。数据采集系统同步采集倾角传感器输出信号与光栅测角信号,通过对比2路信号得出倾角传感器的动态特性。
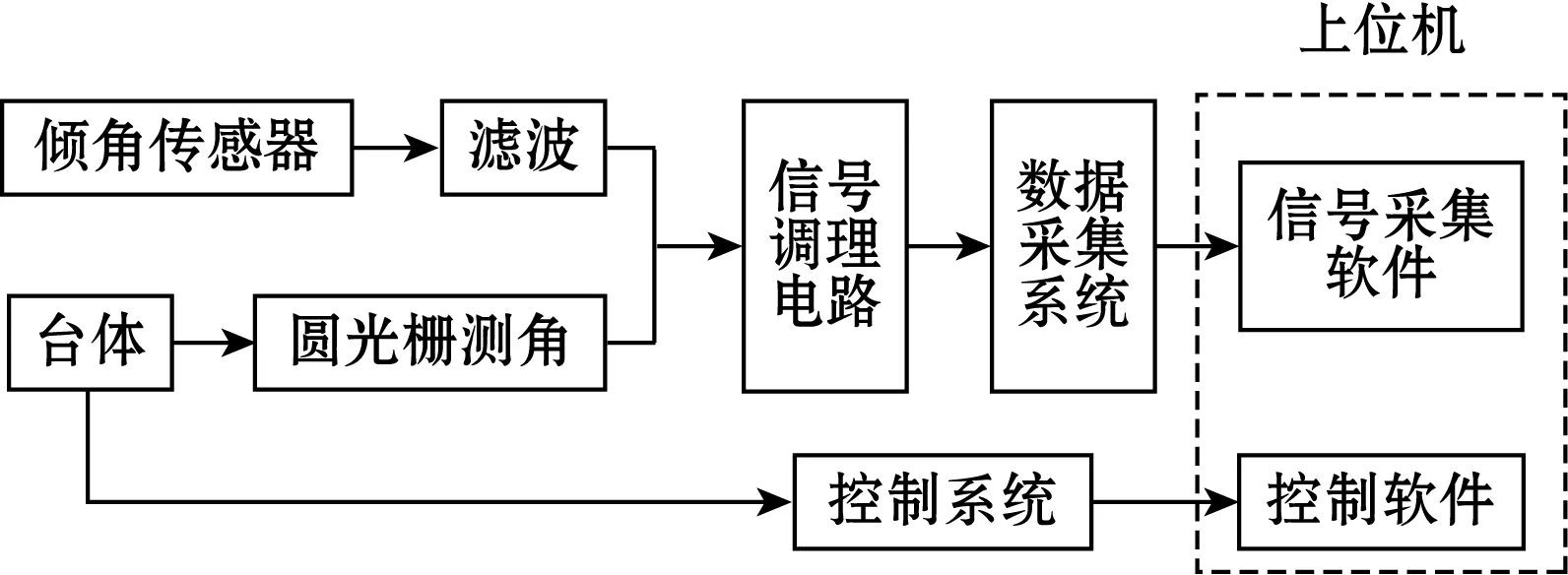
图2 倾角传感器校准装置工作原理
假设校准装置输出正弦信号为A,传感器输出信号为R,通过比较装置角位移信号与传感器输出角度信号,得到被校倾角传感器的输出灵敏度、相位延迟及带宽。
角振动频率为f时校准装置输出角位移:
A(t)=Amsin(2πf+φ0)
(1)
式中:Am为角振动频率为f时,校准装置输出角位移峰值;φ0为角振动频率为f时,校准装置初始相位。
角振动频率为f时,传感器输出角位移:
R(t)=Rmsin(2πf+φ0)
(2)
式中:Rm为角振动频率为f时,传感器输出角位移峰值;φ0为角振动频率为f时,传感器输出信号初始相位。
角振动频率为f时,传感器的灵敏度S(幅值增益)为
(3)
角振动频率为f时,传感器的相位延迟为
Δφ=φ0-φ0
(4)
当幅值增益G=0.707时,对应的频率为fc,则倾角传感器的频带宽度为
Bω=fc
(5)
也可以粗略估计倾角传感器的带宽,计算方法如下:
(6)
式中:DB为幅值衰减;K为传感器静态时的灵敏度。
2 校准装置控制系统
对倾角传感器动态校准装置的控制系统要求如下:实时采集圆光栅反馈的台体角度信息;控制台体做正弦角振动,并能设置控制参数。倾角传感器有角度范围限制,在某频率下的正弦角振动时,控制系统对最大偏角应是可控的;倾角传感器敏感重力加速度,测量输出倾斜角度,正弦角振动的基准应保持与水平面垂直,如果基准偏移,无法正确测量倾角传感器的动态特性,控制系统的输出模式应为位置环正弦角振动。
根据上述要求,再结合校准装置台体结构,控制系统中主控制器选用多轴运动控制器PMAC(programmable multi-axis controller),是基于工控PC机和Windows操作系统的多轴、多通道开放式运动控制器。PMAC可与各种伺服系统相匹配,构成数控系统的核心驱动部分;可与各种检测元件匹配,包括测速发电机、光电编码器、光栅、旋转变压器等。并能提供开放式的人机界面,使控制系统与用户设计的多种目的相匹配[5]。
控制系统硬件结构如图3所示,主要由台体(包含伺服电机,圆光栅测角系统等)、伺服驱动器、PMAC运动控制器,数据采集系统及上位机组成。
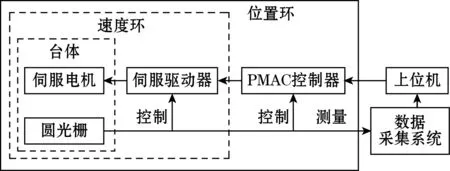
图3 控制系统结构示意图
根据以上对控制系统的需求分析,校准装置的主要工作模式为输出位置环正弦角振动,伺服方式为位置伺服。如图3所示,PMAC仅作为位置环控制器,由伺服驱动器闭合速度环。圆光栅可直接反馈高精度的角位置,但要为速度环提供速度反馈量,需要在误差反馈中加入微分部分,得到角速度量,作为速度环反馈。这样很容易引入高频噪声,对系统造成影响。因此由伺服电机、伺服驱动器及圆光栅(用来测量系统的角度变化)构成速度环,用于实时补偿被控对象内外部的各种扰动。速度环在校准装置的伺服系统中是十分重要的,它需要有良好的伺服性能和伺服刚度。
以PMAC作为位置环的控制器,PMAC通过ISA插槽与PC通信,通过附件板ACC-8E与伺服驱动器连接,ACC-8E输出2路差分模拟信号,控制伺服驱动器,并接收圆光栅输出的位置信号。PMAC卡有精确的位置控制能力,并且可提供一套完整的功能指令集合,能进行直线插补、圆弧插补、样条曲线插补,能以增量或绝对方式运行等,用户可根据自己的控制需求,编写应用程序[6]。通过在校准装置的上位机上编写正弦角振动运动轨迹程序,下载至PMAC卡上,再根据要跟踪的设定轨迹及圆光栅的反馈角度值产生速度环控制量作为速度输入。
PMAC卡为用户提供了PID+速度/加速度前馈+NOTCH滤波的控制环算法,是以下算法的综合:带死区的PID控制算法、积分分离PID控制算法、遇限削弱积分PID控制算法、速度前馈-反馈和加速度前馈-反馈控制算法。PMAC卡可以在多个坐标轴系实现改进型PID算法的综合应用,具有响应速度快和精度高的特点[7-8]。图4为算法结构简图。
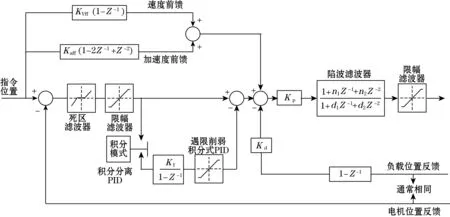
图4 PMAC控制算法结构简图
图4中,KP为比例增益,Kd为微分增益,KI为积分增益。通过这3个参数,可缩短系统响应时间、减少超调并增强系统的稳定性;Kvff为速度前馈增益,可减小由于系统阻尼所引起的跟随误差;Kaff为加速度前馈增益,可减小由于系统惯性所带来的跟随误差。
参数调试时首先采用测试阶跃输入的响应,测试系统跟随性能。逐渐增大比例系数KP,直到系统有较大的超调,并且脉冲结束后台面有振荡现象;然后减小KP,增大Kd,减少系统超调和稳定时间;再增大KI,加快系统响应;调整好比例、积分、微分参数后,采用测试抛物线输入的响应,调整速度、加速度前馈参数,使得误差与速度、加速度无关[9-10]。
图5和图6为调试好的系统阶跃响应和动态响应。
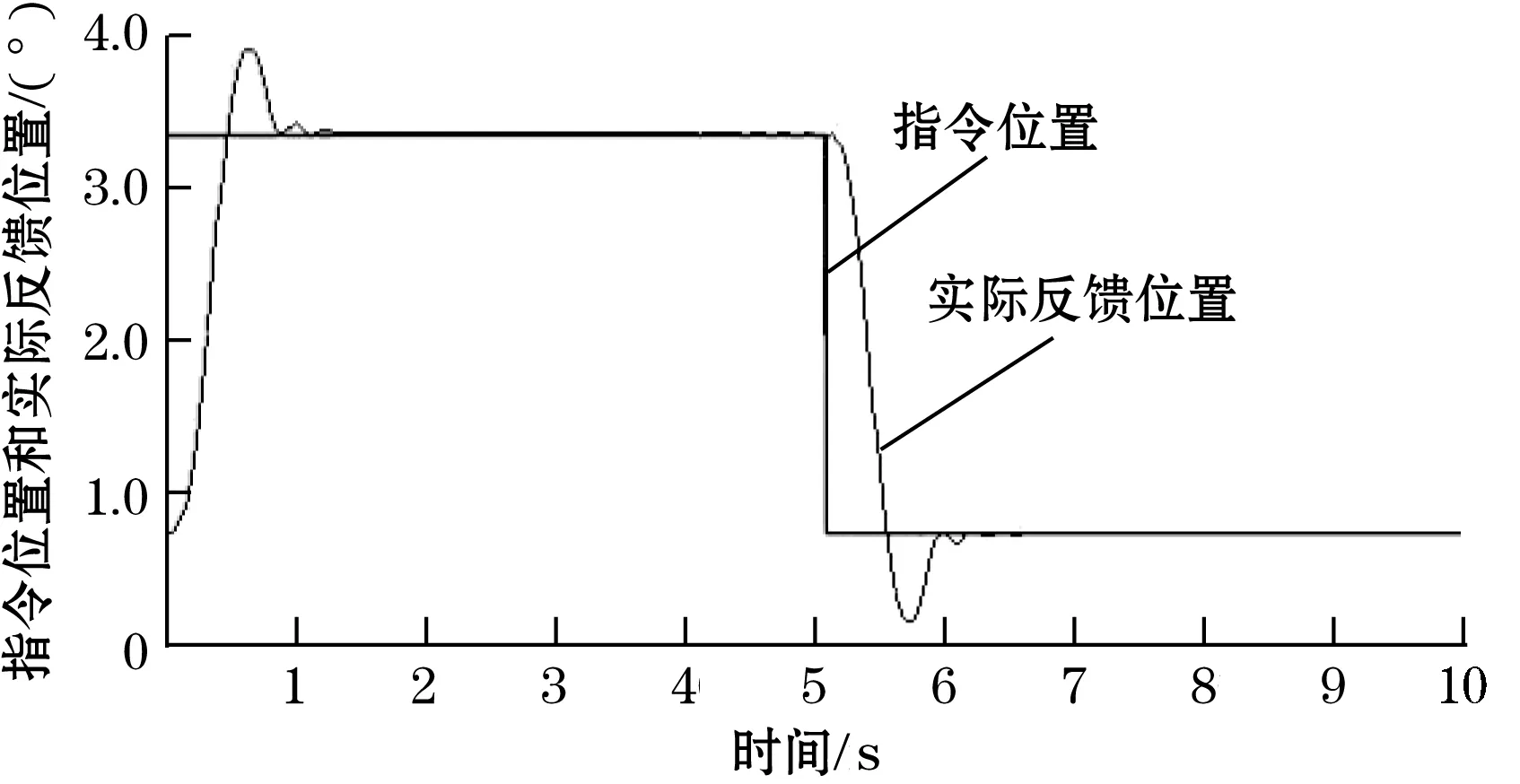
图5 校准装置阶跃响应图
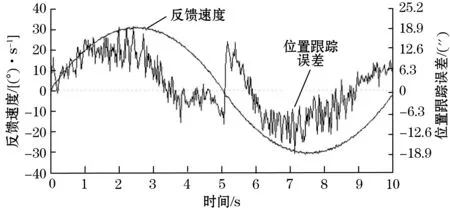
图6 校准装置动态响应图
3 试验验证
3.1 校准装置静态角位置
采用光电自准直仪和棱体测试校准装置的角位置精度,角位置精度高才能保证正弦角振动时基准的位置精度及对最大偏角的控制。试验结果见表1。
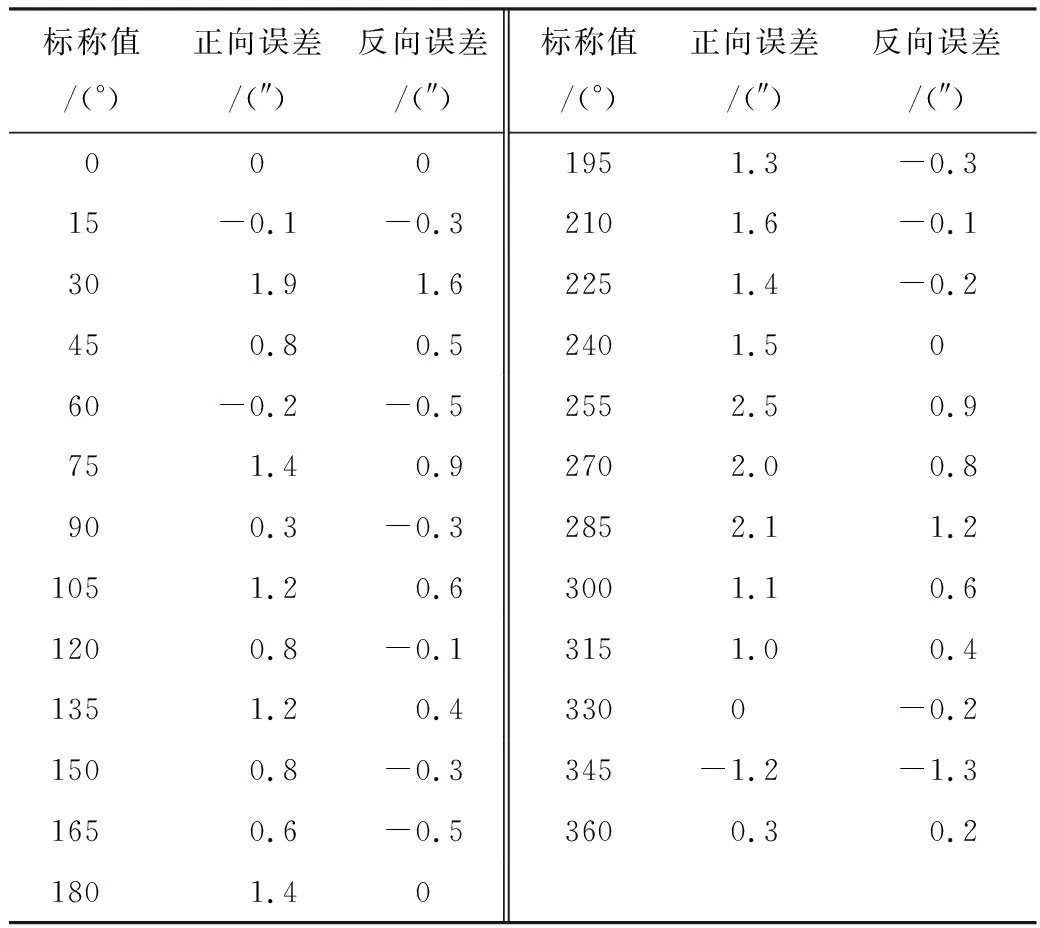
表1 校准装置静态角位置
表1中,定位误差为1.9″,定位重复性为0.2″。校准装置的静态角位置可以满足倾角传感器静态校准的需求,校准装置也可对倾角传感器进行静态校准。虽然静态角位置精度不能代表动态校准时角位置精度,但从一定程度上可以保证动态校准时正弦角振动基准线的位置和最大偏角不会偏差太大。
3.2 校准装置动态试验
校准装置处于空载状态,采集装置在不同频率不同幅值下输出的光栅信号,试验结果如表2所示。
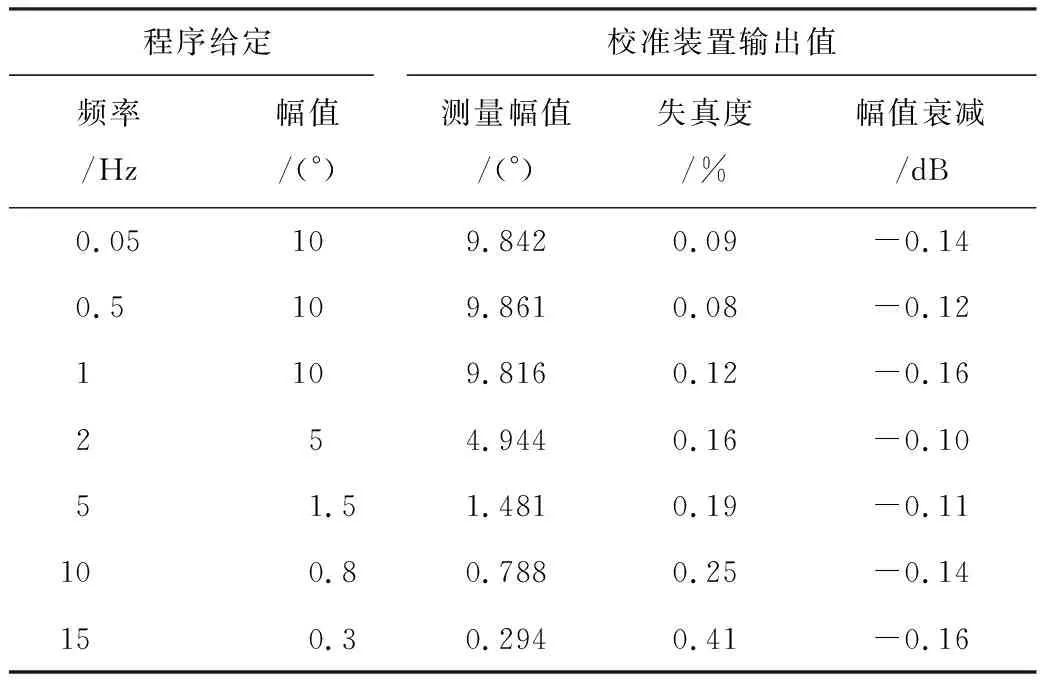
表2 校准装置空载动态试验结果
从表2可以得出,在15 Hz以下,基于PMAC卡的控制系统将失真度控制在0.5%以内,幅值衰减大于-0.2 dB,满足一般倾角传感器动态校准的要求。
3.3 倾角传感器动态校准试验
将某型号倾角传感器[带宽为3 Hz,角度范围为±90°,静态灵敏度为0.02 V/(°)]固定安装在校准装置上,使其敏感轴与台面平行,与校准装置旋转轴系垂直,在不同频率下测试倾角传感器的动态性能。校准结果如表3所示。
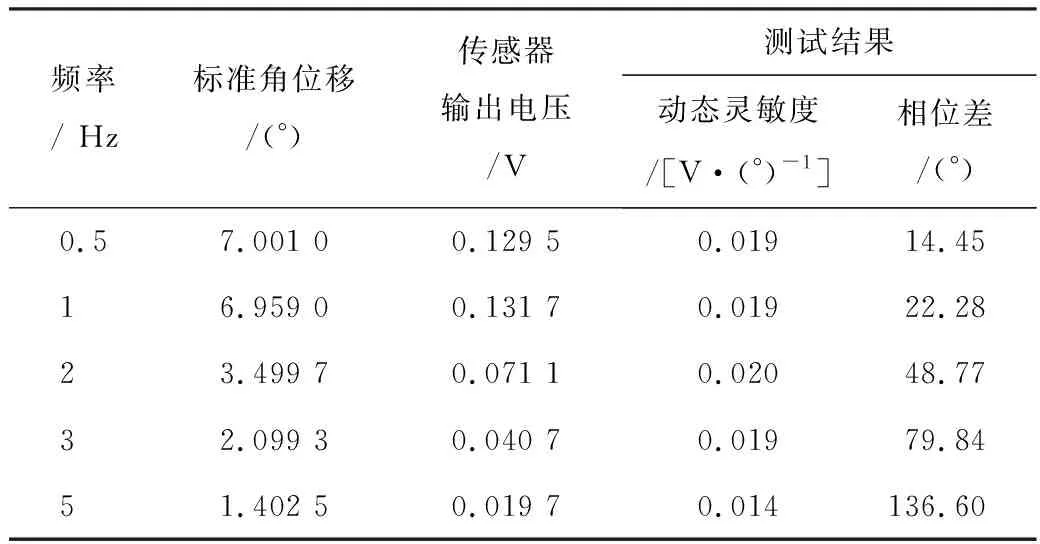
表3 倾角传感器动态测试结果
如表3所示,在5 Hz时,传感器的相位差大于90°,此时灵敏度比静态灵敏度也有所衰减,而3 Hz时相位差小于90°,灵敏度衰减很小,与传感器标称特性基本相同。试验验证了校准装置的控制方案可以满足对倾角传感器校准的需求。
4 结论
文中主要介绍了一种基于PMAC运动控制器的倾角传感器动态校准装置及其控制系统方案设计,并测试了校准装置的静态角位置、空载时动态特性,对某型号倾角传感器开展了动态校准试验,试验结果证明校准装置在0.05~15 Hz时,失真度小于0.5%,所校准倾角传感器结果与其标称指标基本相同。说明以PMAC运动控制卡为核心构建的倾角传感器动态校准装置的控制系统可以实现对倾角传感器的动态校准功能。但15 Hz以上还需要进一步的研究和试验。
猜你喜欢
大学物理(2022年7期)2022-07-26
新高考·高三数学(2022年3期)2022-04-28
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年24期)2019-02-23
中学生数理化·高一版(2018年6期)2018-07-09
理科考试研究·高中(2017年7期)2017-11-04
北方交通(2016年12期)2017-01-15
中学生数理化·高二版(2016年9期)2016-05-14
专用汽车(2015年1期)2015-03-01
