
基于多项式拟合的抗扰动纬度估计和粗对准方法
2020-12-14 07:50杨鹏翔梅春波卢宝峰
中国惯性技术学报 2020年4期
杨鹏翔,梅春波,刘 琴,卢宝峰
(西安现代控制技术研究所,西安710068)
初始对准是为捷联惯性导航系统导航解算提供姿态、方位初值的一项关键技术[1-2]。通常,初始对准过程中,需要外部提供准确的地理纬度信息,以实现对地球自转角速度的补偿。但是,在隧道、深山、密林以及水下等一些特殊场合,获取纬度信息并非易事,因此,需要开展纬度未知条件下的初始对准方法研究。
纬度已知条件下,已有大量的文献研究讨论了捷联惯导系统静基座、扰动基座以及运动基座初始对准问题,取得了丰富的研究成果[3-5]。对于纬度未知条件下的初始对准问题的研究文献则较少,文献[6]讨论了静基座条件下的纬度估计和初始对准方法,首先利用静止状态下,陀螺仪敏感的地球自转角速度估计出纬度值,然后采用双矢量定姿的解析方法实现初始对准;文献[7]、[8]针对纬度未知且基座存在扰动的情况,采用了惯性系初始对准框架,有效隔离了角运动的干扰,对于线运动干扰,则分别采用了小波滤波[9]、积分平滑[10]等方法,其算法的本质都是首先估计出纬度值,然后基于近似的纬度估计值,在运用纬度已知条件下的对准算法实现初始对准。
本文在之前各位学者的研究基础上,提供了另一种可解决基座角晃动及线振动干扰的纬度估计和粗对准方案。首先,通过引入惯性系和姿态阵的链式分解,实现了对基座晃动角速度的隔离;其次,对加速度计测量值进行积分变换,将其投影至惯性系,并对惯性系内比力积分结果进行多项式拟合,实现了对干扰加速度的二次平滑;然后,依据拟合结果,完成了纬度和姿态阵的估计;最后,通过试验验证了本文算法的有效性。与之前的研究方法相比,本文提供的算法在通过惯性系对准隔离角晃动,利用比力积分抑制对准过程中线运动干扰,通过多项式拟合同步估计纬度和姿态,工程实现简单,在收敛速度和精度方面优势明显。
1 惯性系对准原理
惯性系对准以姿态阵链式分解为基础,

其中,n为导航坐标系,取为东北天地理坐标系;in为导航惯性系,与对准开始时刻的n系重合;b为载体坐标系;ib为载体惯性系,与对准开始时刻的b系重合。根据上述坐标系定义,可得,

其中,L为对准点地理纬度信息;t为对准开始后持续时间;cL= cos(L)、sL= sin(L)、cωt= cos(ωiet)、sωt= sin(ωiet)、s2L=sin(2L);ωie为地球自转角速率;为陀螺仪测量角速度。
扰动基座条件下,加速度计测量的主要分量为地球重力加速度在载体系的投影,将基座扰动加速度与加速度计测量误差合计为测量误差,则加速度计的理想测量值可描述为,

为了平滑干扰加速度,对式(3)进行积分,记

则有,在对准过程中任意时刻tk,

因为及gn解析已知,所以,可以得到(tk)的解析表达式为

在纬度L已知时,利用式(5)所有时刻积分矢量的等式关系,完成常值姿态阵的最优估计。然后,结合式(2)计算结果,利用式(1)关系得到对准过程中实时的姿态阵。
当纬度L未知时,依据式(2)、(4),利用陀螺和加速度计的输出,可完成及(tk)的计算,但是及式(6)中(tk)均无法计算,从而也无法完成对准。
同时,(tk)可由陀螺仪和加速度计的测量值直接积分计算,如式(2)、(4)所示。对(tk)的计算结果进行以时间t为自变量的多项式拟合,拟合过程具有对干扰加速度积分误差的二次平滑作用。根据参数的拟合结果,可进一步实现纬度估计和粗对准。
2 纬度估计与粗对准


将式(7)、(8)代入式(5)中,则有


对比式(9)、(10)可得
对式(11)、(12)两端分别求模值,并结合姿态阵的单位正交特性,则有
考虑纬度的值域为[-90°,+90°],则有

对式(11)、(12)两端进行归一化,并结合姿态阵的单位正交特性,则有

进一步,结合姿态阵的正交特性,则有

由式(15)无法区分南北半球,利用估计的姿态阵将最终积分值(tk)投影至in系,记为(tk),由式(7)可知,(tk)的第二个分量的符号与纬度L的符号一致,从而判断纬度的正负。
3 试验验证
在实验室(纬度为34.1975 °)条件下,利用高精度三轴转台,在三个轴向分别施加幅度1 °,频率1 Hz 的角运动,模拟基座的扰动。使用的高精度光纤捷联惯导系统,陀螺漂移重复性及稳定性均优于0.005 °/h,加速度计零偏重复性及稳定性均优于50 μg。
试验分四个方位进行,方位角近似为0 °、90 °、180 °、270 °,每个方位上进行6 组,共24 组。为了方便评估对准效果,每组对准数据由300 s 静止数据和60 s 晃动数据组成。验证时,对每组测试,首先利用前300 s 数据完成初始对准,依据对准结果,对后60 s 晃动数据进行姿态跟踪,以此跟踪姿态为真值参考。
作为不同方位上纬度估计曲线结果如图1所示,粗对准结果相对于参考值偏差收敛曲线如图2~4 所示。统计结果如表1所示。结果表明,晃动条件下,纬度估值可以在60 s 内收敛至0.17 °(RMS)以内;晃动条件下,水平姿态角在10 s 即进入收敛状态,其偏差可以在60 s 内收敛至0.001 °(RMS),航向角偏差可以在60 s 内收敛至0.07 °(RMS)以内。

图3 滚转角估计偏差收敛曲线Fig.3 Estimation errors of gamma
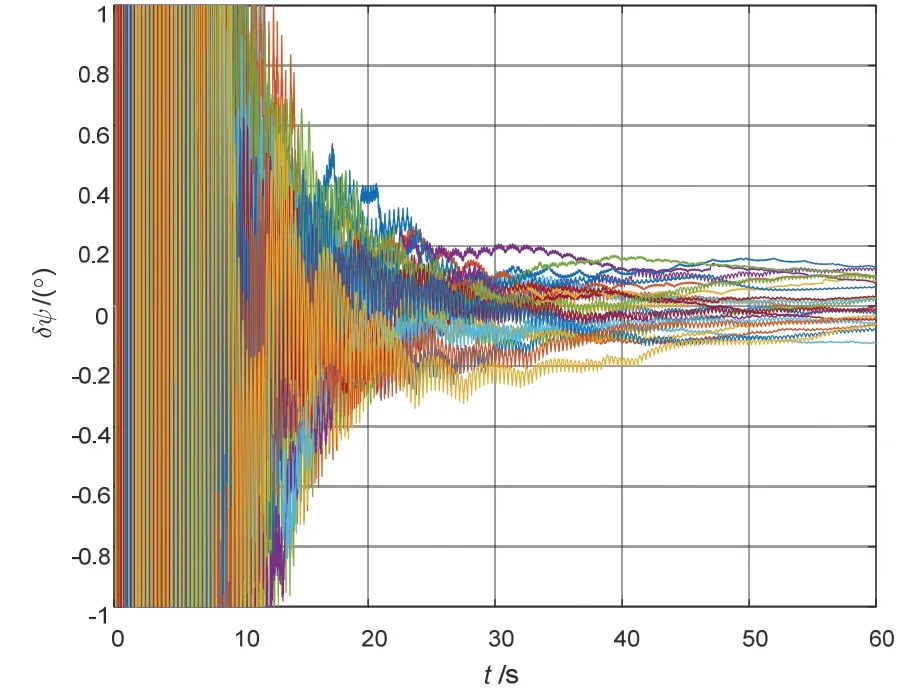
图4 航向角估计偏差收敛结果Fig.4 Estimation errors of yaw

表1 60s 对准结束时刻估计值相对参考值偏差统计Tab.1 the parameters estimated errors
4 结 论
针对纬度未知条件下晃动基座初始对准问题,本文实现了一种基于惯性系比力积分变换和多项式拟合的纬度估计与粗对准算法,具有隔离基座角晃动、抑制基座线振动干扰的特点。通过多方位摇摆台对准实验验证,结果表明,以静基座对准后姿态保持结果为参考时,基于1 min 的摇摆数据,纬度估计精度可以达到0.17 °(RMS),水平姿态对准相对偏差不大于0.001 °(RMS),航向角对准相对偏差不大于0.07 °(RMS)。本文所设计算法计算简洁,便于工程实现,具有很好的工程应用价值。
猜你喜欢
上海计量测试(2021年4期)2021-09-13
中国惯性技术学报(2019年1期)2019-05-21
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
齐鲁周刊(2017年29期)2017-08-08
中学政史地·教学指导版(2016年12期)2017-05-16
探测与控制学报(2015年4期)2015-12-15
探测与控制学报(2015年4期)2015-12-15
弹箭与制导学报(2015年1期)2015-03-11
导航定位与授时(2014年2期)2014-04-27
