
Fully distributed time-varying formation tracking control for multiple quadrotor vehicles via finite-time convergent extended state observer
2020-12-09 06:57WenqingZHANGChoyngDONGMopengRANYngLIU
CHINESE JOURNAL OF AERONAUTICS 2020年11期
Wenqing ZHANG, Choyng DONG, Mopeng RAN, Yng LIU
a School of Aeronautic Science and Engineering, Beihang University, Beijing 100191, China
b School of Electrical and Electronic Engineering, Nanyang Technological University, Singapore 639798, Singapore
KEYWORDS
Abstract This paper investigates a time-varying anti-disturbance formation problem for a group of quadrotor aircrafts with time-varying uncertainties and a directed interaction topology.A novel Finite-Time Convergent Extended State Observer (FTCESO) based fully-distributed formation control scheme is proposed to enhance the disturbance rejection and the formation tracking performances for networked quadrotors. By adopting the hierarchical control strategy, the multiquadrotor system is separated into two subsystems: the outer-loop cooperative subsystem and the inner-loop attitude subsystem. In the outer-loop subsystem, with the estimation of disturbing forces and uncertain dynamics from FTCESOs, an adaptive consensus theory based cooperative controller is exploited to ensure the multiple quadrotors form and maintain a time-varying pattern relying only on the positions of the neighboring aircrafts. In the inner-loop subsystem, the desired attitude generated by the cooperative control law is stably tracked under a FTCESO-based attitude controller in a finite time.Based on a detailed algorithm to specify the cooperative control protocol,the feasibility condition to achieve the time-varying anti-disturbance formation tracking is derived and the rigorous analysis of the whole closed-loop multi-quadrotor system is given.Some numerical examples are conducted to intuitively demonstrate the effectiveness and the improvements of the proposed control framework.
1. Introduction
The past few decades witnessed rapid developments of the formation control for Unmanned Aerial Vehicles (UAVs) due to its potential applications in plenty of fields.1–3Different from fixed-wing UAVs, multi-rotor vehicles have many obvious superiorities such as simple structure, vertical takeoff and landing, hovering ability, and fast maneuverability.4As a representative application of multi-rotor UAVs, the formation issues of multi-quadrotor networks have attracted wide interest from both research and engineering communities.5–8
There are several significant challenges to the multiquadrotor formation control in practical scenarios. First,quadrotor vehicles are types of in nature underactuated,strong nonlinear coupling and Multi-Input Multi-Output (MIMO)systems, which highly complicates the controller design especially in formation control problems.6Besides, throughout the whole formation flight, each aircraft of the multiquadrotor system is inevitably subject to time-varying disturbances and other adverse factors, and this heavily threatens the flight stability. Last but not least, the realization of the desired formation generally cannot rely on the centralized coordination. This is because it is practically inapplicable for each aircraft to acquire global information in real time especially in the presence of limited sensing capability of sensors and unreliable information interaction. In such a circumstance,the analysis of the formation control problems for multiple quadrotor UAVs becomes much more complicated.
In order to solve the formation control problems for multiple UAVs, an abundance of approaches have been proposed from different perspectives, including leader-follower approach, virtual structure strategy, behavior-based method,finite-time control framework, etc.9In Ref.10and Ref.11, the leader-follower based and virtual structure based timevarying formation protocols are proposed respectively for multi-quadrotor systems with undirected switching topologies.The necessary and sufficient feasibility conditions for the realization of formation control are also extracted. However, the rotational subsystem of the quadrotor aircraft is not involved.In Ref.12based on the relative weight of desired behavior of each UAV, a behavioral approach is proposed to carry out a waypoint-passing formation flight. The collision avoidance formation problems for multiple UAVs are considered in Ref.13under a unified distributed optimal control scheme. In this framework,an avoidance cost is introduced via an inverse optimal control method, and the formation control and the obstacle avoidance are integrated together. In Ref.14, based on a new pairwise collision avoidance function of relative positions and velocities, the distributed coordination control of multiple quadrotor aircrafts is studied in three-dimensional space. With a fault-tolerant idea, in Ref.15, the Fault-Tolerant Formation Control (FTFC) methodology has been conducted to counteract the actuator faults during the formation flight,in which the finite-time convergence of FTFC gains are also considered. In Ref.16, a virtual target guidance based model predictive control scheme is synthesized for multiple UAVs to achieve the desired formation relying only on the neighboring information. An event-triggered mechanism is also introduced into the formation protocol to reduce the calculative burden. In Ref.17, the distributed formation control for multi-quadrotor systems is carried out under a nonsmooth consensus algorithm, in which the translational subsystem is tackled by the linear quadratic regulator optimal approach and a global-bounded finite-time attitude controller is proposed for the rotational subsystem. Fully distributed finitetime formation control problems for multiple quadrotor aircrafts are investigated in Ref.18based on the homogeneous system theory and finite-time Lyapunov theory. The proposed protocol is comprised of a leader observer, a trajectory controller and an attitude controller which ensure the quadrotors achieve the desired formation in finite-time. However, the aforementioned works rarely take into consideration the internal uncertainties and external disturbances which inevitably exist in practical formation tasks.
In recent years, some researchers have noticed this issue and have some results on anti-disturbance formation control for multi-UAVs published.19–21In Ref.19, an priori-bounded adaptive control scheme is proposed to solve the formation control problems of multiple quadrotor UAVs with parametric uncertainties and external disturbances. However, the disturbances considered in Ref.19are actually time-invariant because of the third assumption assumed. The three-dimensional antidisturbance formation tracking of multiple quadrotors is conducted in Ref.20using a robust consensus-based approach and filtering design technique.Note that the communication graph adopted in Ref.20is undirected which means that the information interaction among aircrafts is bidirectional and the resource consumption in practice will be unnecessarily doubled.In Ref.21,a finite-time neural network disturbance observer based formation control scheme is proposed, in which a distributed finite-time trajectory controller and a finite-time attitude controller are designed using the nonsingular fast terminal sliding mode approach. Under this type of formation control law, the multi-UAV system can achieve timeinvariant formation tracking in a finite time. Actually, up to now, the research results on anti-disturbance formation control for multi-quadrotor systems are not very affluent and complete. Thus, it is still necessary and open to further improve the anti-disturbance formation control performance for the multi-quadrotor system in practical applications.
Inspired by the analysis above and partly motivated by the previous works,22–26in this paper,a novel Finite-Time Convergent Extended State Observer (FTCESO) based fullydistributed formation control framework is proposed, by which the time-varying anti-disturbance formation tracking problems for multi-quadrotor systems with directed interaction graph are conducted in a 3-D space. As we know, the Extended State Observer(ESO)is the core part of Active Disturbance Rejection Control (ADRC) scheme which has a strong capability to deal with the uncertain nonlinear systems.27–30While the linear ESO with high-gain characteristic has been widely applied in varieties of applications, it has an undesirable ‘‘peaking phenomenon” and can only asymptotically converge in an infinite time interval.31By contrast, the FTCESO not only can alleviate the peaking problem effectively, but also can achieve the convergence in a finite time.Actually, the FTCESO has a better observation performance under the same conditions, which can be verified in the latter simulation section. Although some works have investigated the applications of FTCESOs on single one object,26,32the extension to multi-quadrotor systems is not trivial, especially in the case where the multiple quadrotors need to perform cooperative missions under a partial directed topology.
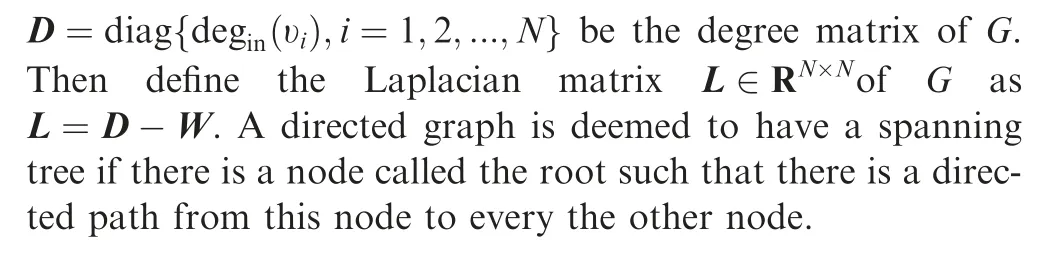
The proposed formation control framework is designed based on a general backstepping method, and there are two blocks involved in the scheme: a fully-distributed FTCESObased cooperative controller for the outer-loop subsystem and a finite-time anti-disturbance attitude tracking controller for the inner-loop subsystem. In the first subsystem, with the fully distributed perspective,an adaptive consensus theory22,23is employed to exploit the formation control protocol relying only on the aircraft’s neighboring output information. By adopting distributed FTCESOs, the velocities of the aircrafts,the external time-varying disturbing forces, uncertain nonlinear dynamics and unknown control inputs of the leader are estimated and compensated in the control law in real time.According to the hierarchical control strategy,the desired attitude for the rotational subsystem is generated by the formation control law. For the inner-loop, based on the homogeneous system theory,finite-time control technique and the FTCESO,an error feedback controller is developed such that each follower’s attitude converges to the desired attitude in a finite time in the presence of time-varying disturbing moments and internal nonlinearities. Compared with the previous works,the main contributions are summarized as follows:(A)A novel FTCESO-based fully-distributed formation control scheme is first proposed for the multi-quadrotor systems to enhance the disturbance rejection and cooperative flight performances,and the rigorous theoretical analysis of the whole closed-loop system is given, (B) compared with Refs.10,11,33,the formation protocol designed in this paper does not need the eigenvalue information of Laplacian matrix or any other global information.Moreover,it is actually a type of output feedback control law only requiring the quadrotors’positions to be measurable,which means that the method proposed here is of more practical significance, iii) in comparison to the ESO-based control scheme in Ref.33, the developed FTCESO-based formation protocol has got remarkable improvements in the disturbance estimation and formation tracking which are clearly demonstrated in the simulations.
The rest of paper is organized as follows. Some notations and problem statement are presented in Section 2.In Section 3,the FTCESO-based fully-distributed formation control framework is thoroughly addressed with theoretical analysis in both outer-loop and inner-loop subsystems.Section 4 demonstrates the effectiveness and improvements by two numerical examples, and the whole work is concluded in Section 5.
2. Preliminaries and problem statement
2.1. Mathematical preliminaries
2.2. Related definitions and lemmas






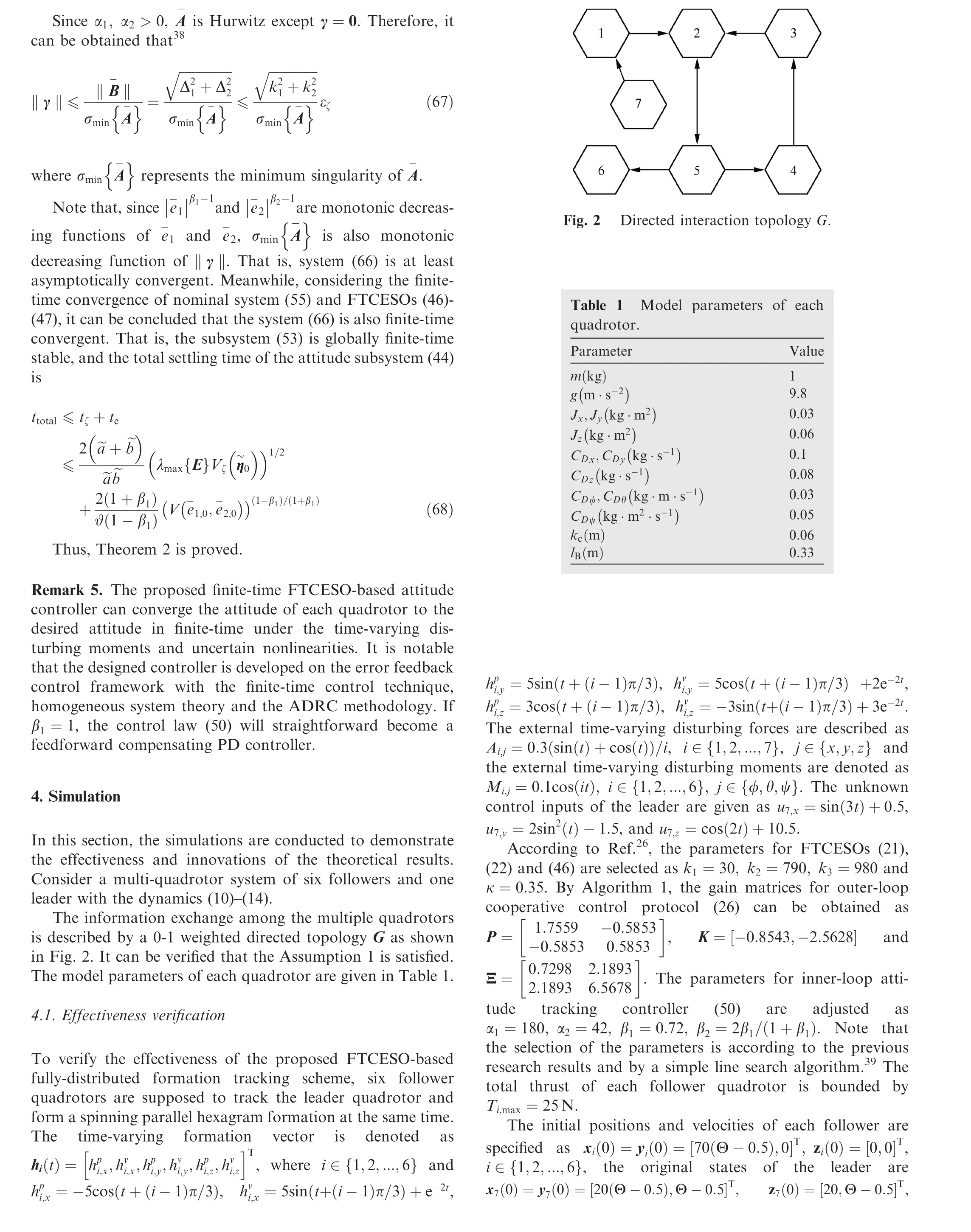
The macroscopic trajectory of the multi-quadrotor system is shown in Fig.3 in 3-D space, where the leader is marked by a black diamond and the six followers are marked by a blue circle, red square, yellow diamond, cyan hexagram, emerald green pentagram and purple triangle, respectively. It can be seen that the status of the followers and the leader at t =10 s, 15 s, 20 s, 25s are given and the path of each quadrotor from the initial moment is also depicted.Obviously,the initial positions of the quadrotors are scattered at first and the expected formation is not quite achieved at t =10 s. Then,from t =15 s to 25 s, all six followers keep a stable timevarying parallel hexagram formation with the leader in the center all the time.Fig.4 shows the total FTCESO real estimation error of the outer-loop subsystem for all seven quadrotors and it is clear that the FTCESOs converge extremely fast and the estimation error can be very small.
We take the outer-loop states of the quadrotor No.1 in the x-axis direction as an example to show the performance of the FTCESO. From Fig.5, one can see that the states and the uncertainties are perfectly estimated by the FTCESO. Fig.6 depicts the curve of total formation tracking error of the multi-quadrotor system and it shows that the formation tracking error starts converging extremely small since around t =10 s. Fig.7 illustrates the convergence of the coupling weights of all the followers in the x-axis direction, that is,Remark 2 is verified.
Fig.3 Trajectory of the multi-quadrotor system.
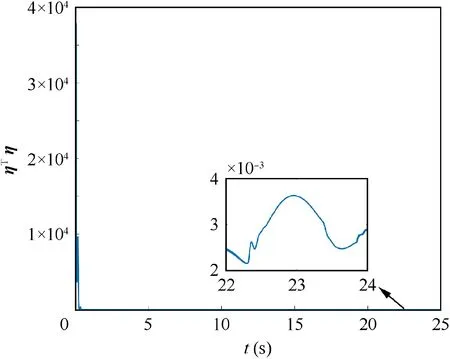
Fig.4 Total real FTCESO estimation error of outer-loop subsystem for all seven quadrotors.

Fig.5 FTCESO performance of outer-loop subsystem in the xaxis for quadrotor No.1.
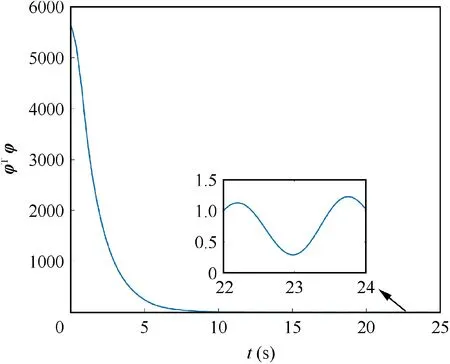
Fig.6 Total formation tracking error of whole multi-quadrotor system.
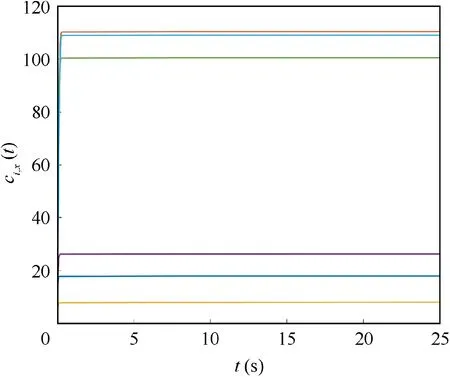
Fig.7 Coupling weights of all six followers in the x-axis
4.2. Comparison with the previous work
In this section, the same formation tracking problems in 4.1 are also conducted by an ESO-based anti-disturbance formation tracking protocol proposed in Ref.33. The improvements and innovations of the control scheme proposed in this paper will be thoroughly demonstrated by the comparisons of simulation below.
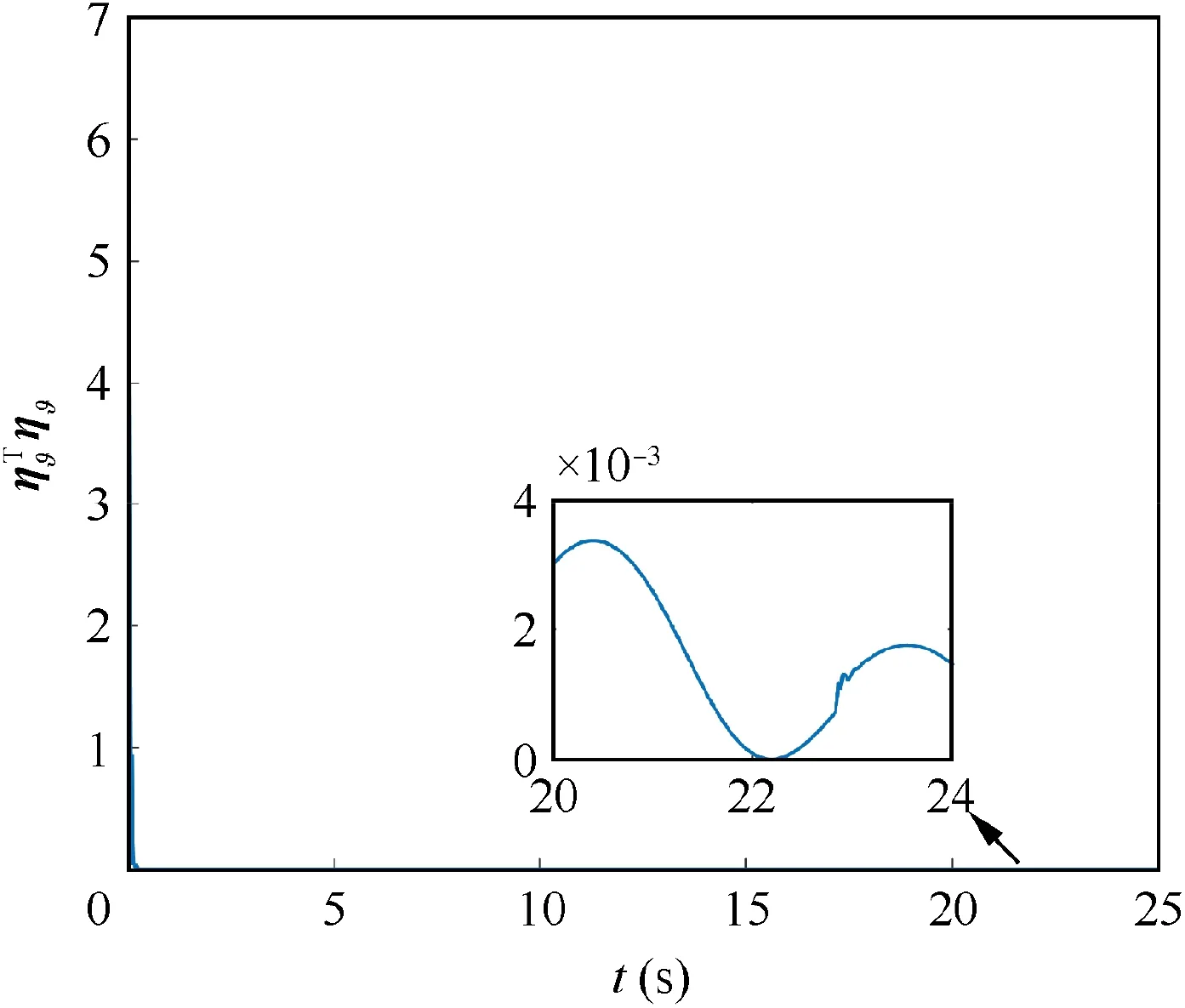
Fig.8 Total real FTCESO estimation error of inner-loop subsystem for six follower quadrotors
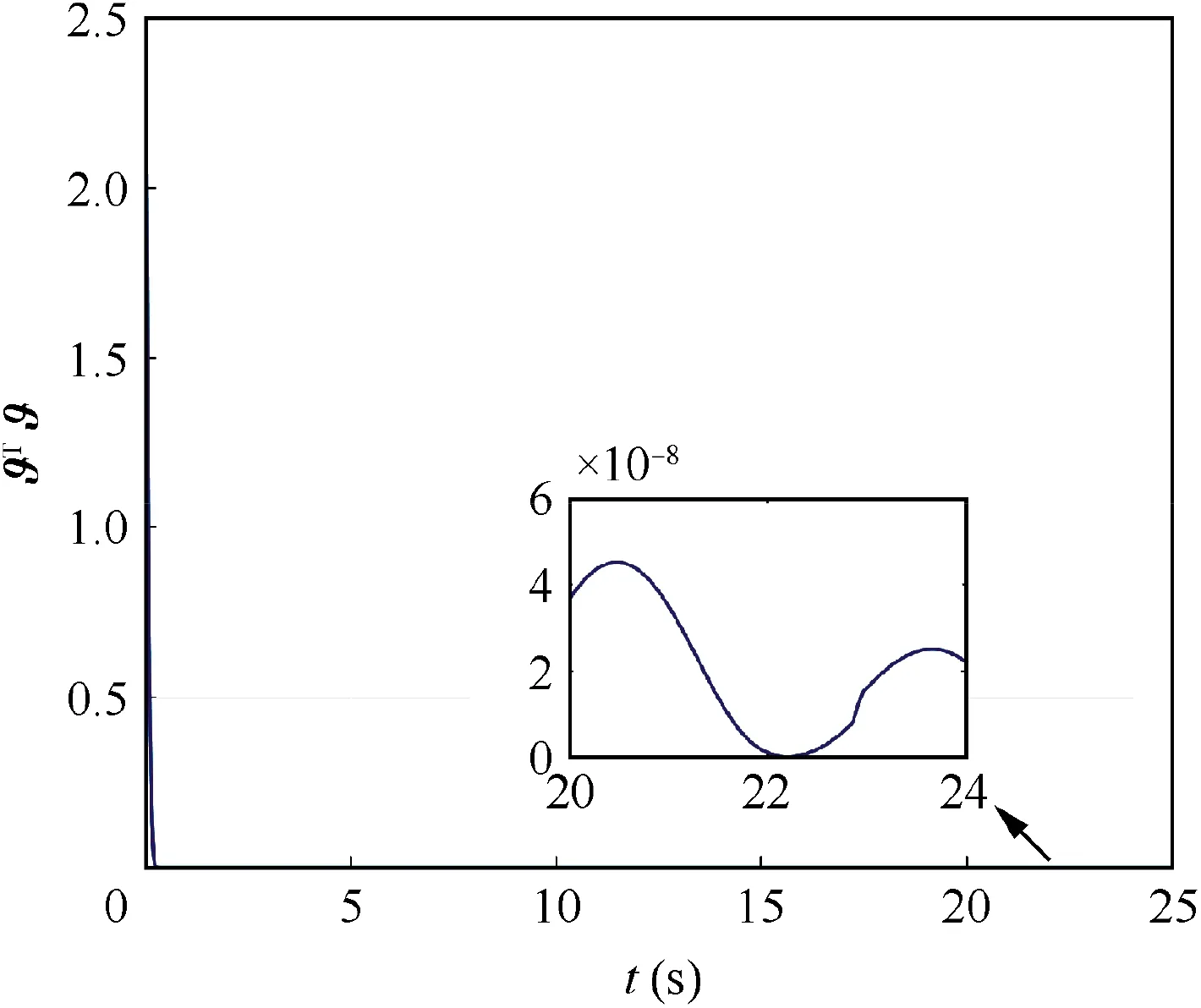
Fig.9 Total attitude tracking error of whole multi-quadrotor system.
Fig.8 displays the total FTCESO real estimation error of the attitude subsystem for six followers and it shows that the FTCESO also works well in the inner-loop subsystem of the multi-quadrotor network. The total attitude tracking error is depicted in Fig.9 which presents that the inner-loop subsystem converges much faster than the outer-loop subsystem and also the convergence is much smaller.
According to the simulation results above,it is verified that the fully distributed anti-disturbance formation tracking problem is totally solved for the uncertain multi-quadrotor system(10)–(14) under the FTCESO-based fully distributed formation protocol (26) and the FTCESO-based finite-time attitude controller(50).In the following,the improvements of the proposed control scheme are further demonstrated.
wheretheobservergainsareselectedas β01=-150.3628, β02=-126.8572, β03=-85.7925,the parameters α1, α2, β1, β2are adopted the same as in Section 4.1. The initial estimation values of ESOs and FTCESOs are the same which can be specified as four fifths of the initial states of the multi-quadrotor system. The comparisons of the formation tracking performance are as below.
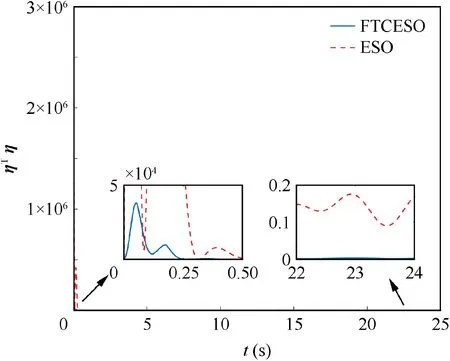
Fig.10 Comparison of total real estimation error between FTCESO and ESO for outer-loop subsystem.
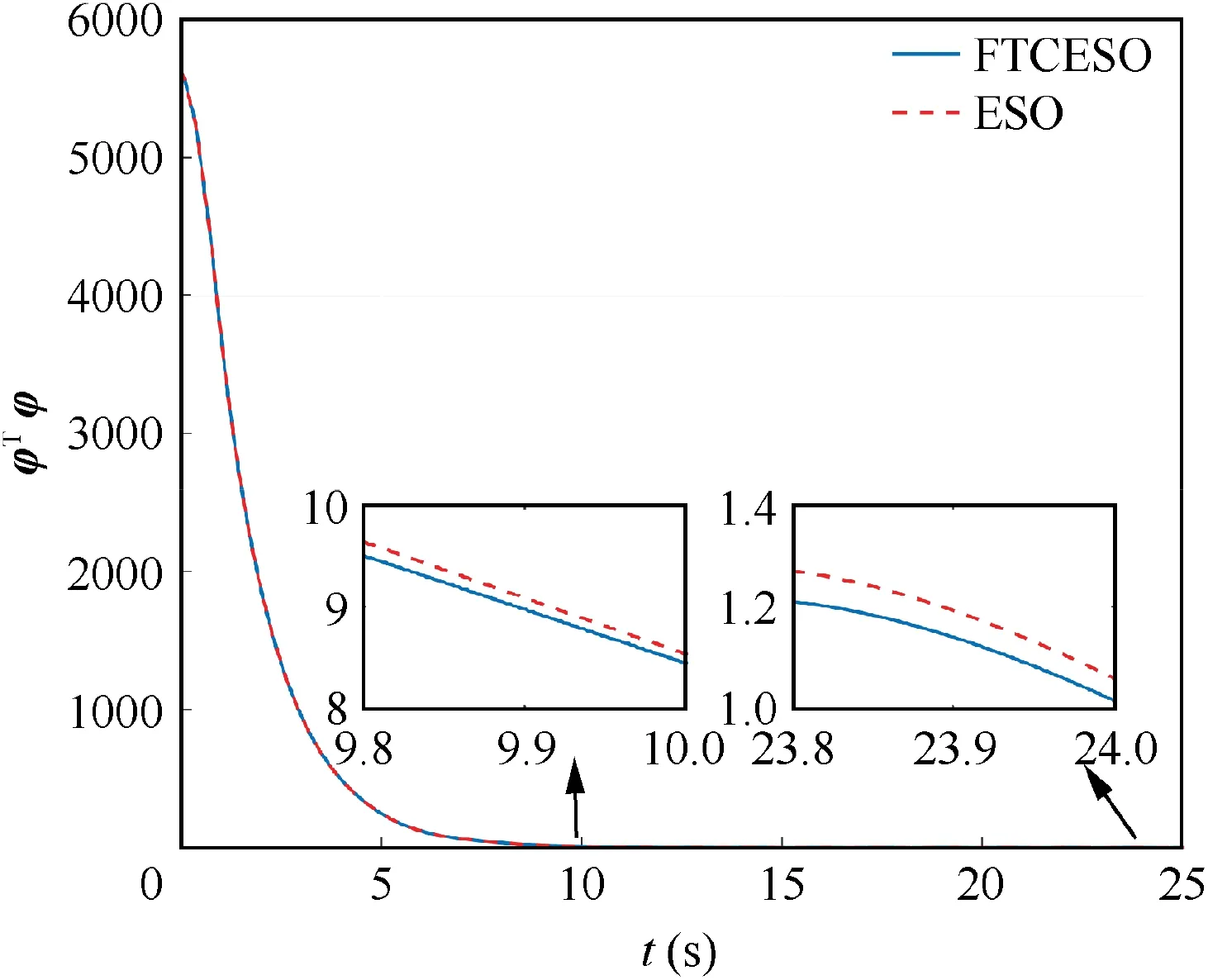
Fig.11 Comparison of total formation tracking error between FTCESO-based and ESO-based formation protocol.
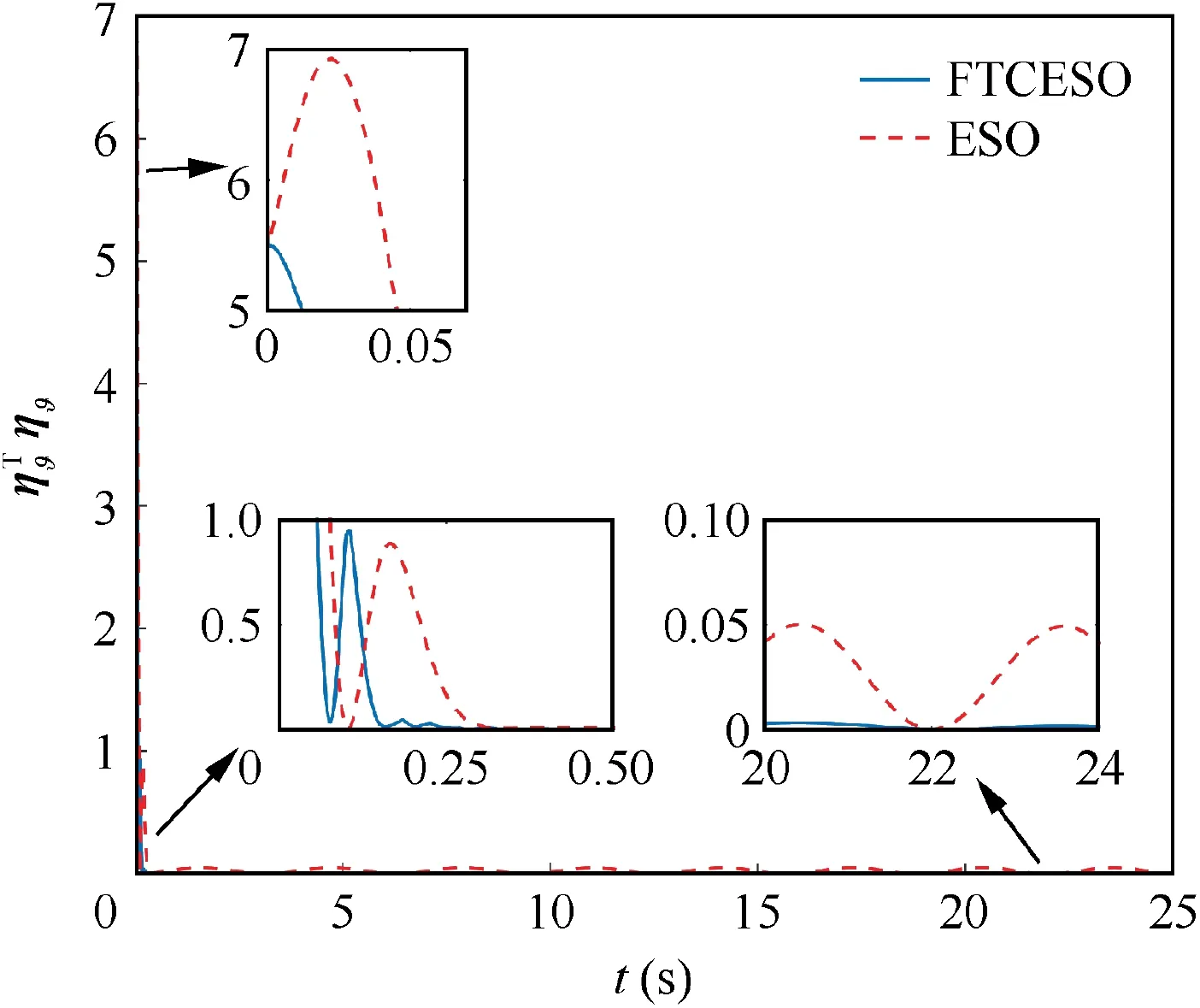
Fig.12 Comparison of total real estimation error between FTCESO and ESO for inner-loop subsystem.
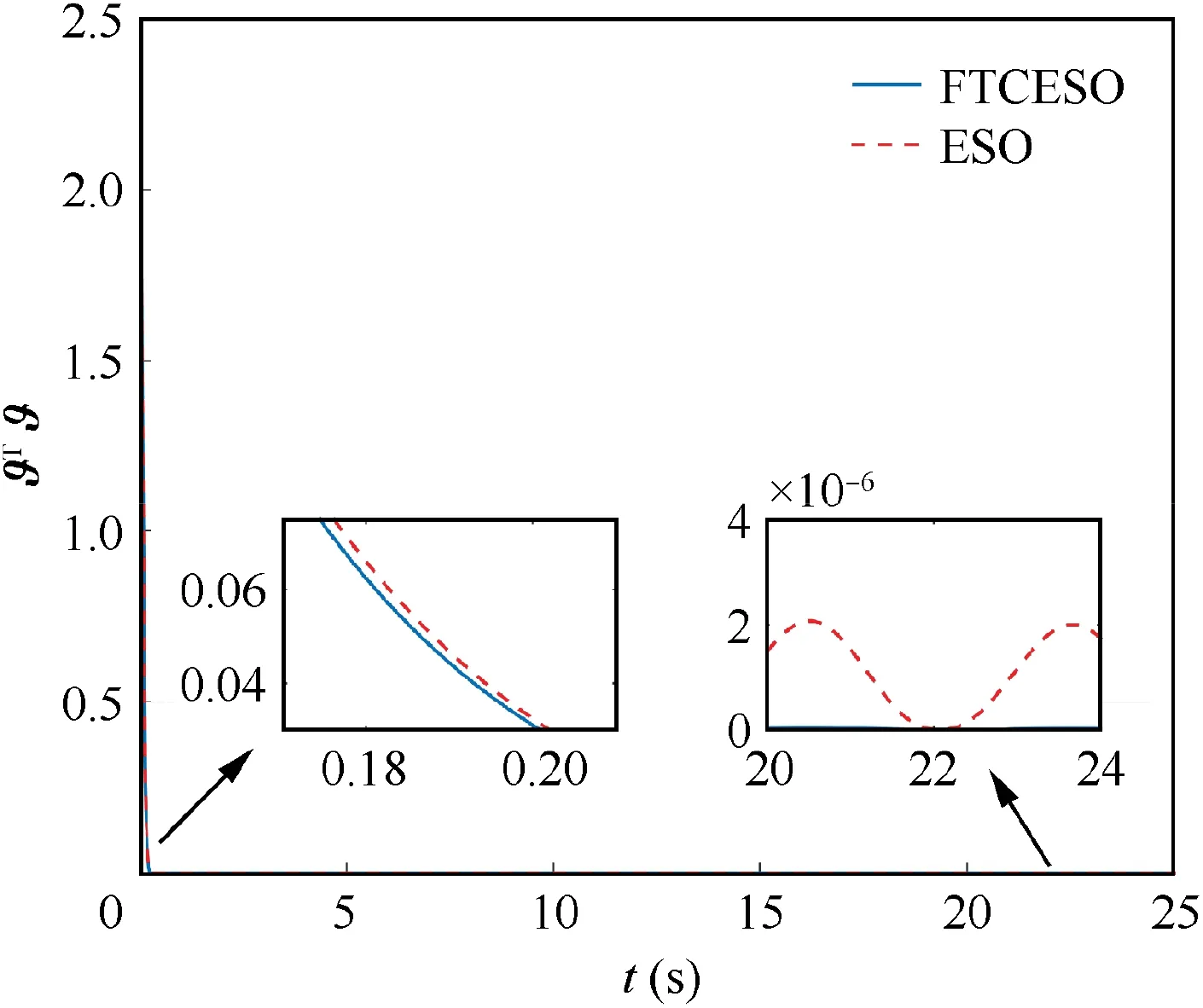
Fig.13 Comparison of total attitude tracking error between FTCESO-based and ESO-based attitude controller.
Fig.10 shows that the total real estimation error of FTCESOs for outer-loop subsystem of multi-quadrotor network has a much smaller overshoot and convergence than that of ESOs.Besides, the FTCESOs also converge faster than ESOs due to the finite-time convergence characteristic. Fig.11 further demonstrates that the FTCESO-based formation protocol(26)is of better formation tracking performance than the protocol (11) in Ref.33.
For the attitude subsystem, the FTCESO still has a better performance in all aspects of overshoot, convergence speed and convergence value, which can be verified in Fig.12.Because of the better performance of FTCESO, the attitude tracking performance under the FTCESO-based controller is undoubtedly better than that under the ESO-based one. This can also be drawn from Fig.13.
5. Conclusions
(1) A novel FTCESO-based fully distributed formation control framework is developed for multi-quadrotor systems with time-varying uncertainties and a directed interaction graph. Under the designed control framework, the time-varying anti-disturbance formation tracking problems can be perfectly solved based only on the aircraft’s neighboring output information.
(2) Based on a detailed algorithm to specify the cooperative control protocol, the feasibility condition to achieve the time-varying anti-disturbance formation tracking for multi-quadrotor systems is derived and the rigorous theoretical analysis of the whole closed-loop system is given.
(3) By conducting a comparison simulation example, it is clearly shown that,compared with an recently proposed ESO-based formation protocol, this novel FTCESObased control strategy improves the disturbance rejection and formation tracking performances.
(4) It is of interest to further study the finite-time formation issues under the proposed control scheme or to extend the results to a switching directed topology case.
 CHINESE JOURNAL OF AERONAUTICS2020年11期
CHINESE JOURNAL OF AERONAUTICS2020年11期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Event-triggered control for containment maneuvering of second-order MIMO multi-agent systems with unmatched uncertainties and disturbances
- Adaptive level of autonomy for human-UAVs collaborative surveillance using situated fuzzy cognitive maps
- Coactive design of explainable agent-based task planning and deep reinforcement learning for human-UAVs teamwork
- Two-phase guidance law for impact time control under physical constraints
- Adaptive leader–follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances
- Optimal video communication strategy for intelligent video analysis in unmanned aerial vehicle applications