
Event-triggered control for containment maneuvering of second-order MIMO multi-agent systems with unmatched uncertainties and disturbances
2020-12-09 06:58YioZHANGDnWANGZhouhuPENGLuLIUShiminWANG
CHINESE JOURNAL OF AERONAUTICS 2020年11期
Yio ZHANG, Dn WANG,*, Zhouhu PENG, Lu LIU, Shimin WANG
a School of Marine Electrical Engineering, Dalian Maritime University, Dalian 116026, China
b Department of Electrical and Computer Engineering, University of Alberta, Edmonton, Alberta T5J 4P6, Canada
KEYWORDS
Abstract This paper is concerned with distributed containment maneuvering of second-order Multi-Input Multi-Output (MIMO) multi-agent systems with non-periodic communication and actuation. The agent is subject to unmatched nonlinear dynamics and external disturbances.Event-triggered containment maneuvering control methods is developed based on a modular design. Specifically, an estimator module is constructed based on neural networks and the nonperiodic obtained follower information through event-triggered communication. Next,a controller module is designed by using the identified information from the estimator module and a third-order linear tracking differentiator. An event-triggered mechanism is introduced for updating the actuator. Then, a path update law is designed based on the non-periodic leader information through event-triggered communication. The closed-loop system cascaded by the estimation subsystem and control subsystem is proved to be input-to-state stable, and Zeno behavior is excluded in the control process. The proposed method is capable of reducing the consumption of communication and actuation. A simulation example is provided to substantiate the effectiveness of the proposed event-triggered control method for distributed containment maneuvering of second-order MIMO multi-agent systems.
1. Introduction
During the past two decades, cooperative control problem is extensively investigated. Distributed cooperative control can find many applications in unmanned systems, such as unmanned aerial vehicles,1–4autonomous marine vehicles,5–7and unmanned ground vehicles.8Distributed cooperative control is to drive autonomous systems to achieve a cooperative motion based on local information exchanges. Topics along this research direction include leaderless consensus control,9,10leader-following consensus control guided by a leader,11–13and containment control guided by multiple leaders.14–25Specifically, containment control is to drive multi-agent systems to track and remain in a convex hull formed by multiple leaders.
During the past few years, a lot of results on containment control are available.14–25In Ref.14,a containment controller is designed for mobile robots to a given target destination. In Ref. 15, a time-delay containment control problem is addressed for multi-agent systems with first-order discretetime dynamics based on z-transformation and Routh Criterion. Containment control is addressed systematically for high-order linear time-invariant swarm systems based on the state-feedback design16and the output-feedback design.17In Ref. 18, distributed containment control is investigated for Lagrangian dynamics with uncertain parameters. In Ref. 19,robust global containment control is investigated for secondorder multi-agent systems subject to input saturation by using a slide mode control method. In Ref. 20, a distributed observer-type containment protocol is developed for highorder multi-agent systems based on relative output measurements of neighbors.In Ref.21,a fuzzy-based adaptive control method is proposed for containment control of nonlinear systems with unmeasurable states. In Ref. 22, formationcontainment problem of a class of linear multi-agent systems is addressed. In Ref. 23, a formation-containment controller is designed for multi-rotor unmanned aerial vehicles based on the directed communication strategy, and experiment results are given. In Ref. 24, a distributed finite-time faulttolerant control method is proposed for containment control of multiple unmanned aerial vehicles in the presence of actuator faults and input saturation. In Ref. 25, dynamic threedimensional containment control is investigated for multiple unmanned aerial vehicles based on a sampled-data based protocol.The methods proposed in Refs.14–25 can be ascribed to the containment tracking guided by multiple time-varying trajectories.
In the presence of multiple parameterized paths, containment maneuvering of multi-agent systems has drawn great attention26–31.In Ref.26,containment maneuvering is investigated for networked Multi-Input Multi-Output (MIMO) nonlinear systems by using a predictor-based neural adaptive control approach. In Ref. 27, an adaptive control method is presented for state-feedback containment maneuvering of fully-actuated marine surface vehicles by using an estimatorcontroller decoupling design. In Ref. 28, distributed containment control is investigated for marine vessels by using an output-feedback design. In Ref. 29, output feedback containment maneuvering problem with time-varying formation and collision avoidance is addressed for multiple autonomous surface vehicles based on potential functions and extend state observers. In Ref. 30, distributed containment maneuvering is investigated for under-actuated unmanned surface vehicles by suing an auxiliary variable approach and an extended state observer. In Ref. 31, a finite-time anti-disturbance rejection control method is proposed for output-feedback containment maneuvering of multiple autonomous surface vehicles.Regarding to the containment maneuvering controllers developed in Refs. 26–31, communication and actuation are executed by a continuous or pre-timed strategy, resulting in the high consumption of system resources. Many low-cost multiagent systems are always resource-constrained. Therefore,non-periodic control methods are highly desirable to relieve the resource consumption of communication and actuation.
In recent years,event-triggered control provides an efficient way to construct non-periodic control schemes. Many eventtriggered control methods have been proposed for the individual plant in Refs. 32–37, and are further extended to multiagent systems38–44. In Ref. 38, an event-triggered controller is designed for first-order linear networked systems to reduce the frequency of actuator updates. In Ref. 39, an eventtriggered fuzzy adaptive controller is designed for containment control of strict-feedback systems. In Ref. 40, an eventtriggered consensus controller is constructed for networked systems subject to the input time delay. In Ref. 41, an eventtriggered fuzzy adaptive control methods are proposed for consensus control of nonlinear multi-agent systems. In Ref.42, an event-triggered distributed cooperative controller is designed for unmanned aerial vehicles based on virtual target guidance and model predictive control in the kinematics level.In Refs. 43,44, fully distributed event-triggered protocols are proposed for linear multi-agent systems. Generally speaking,communication and actuation are executed by predetermined triggering events in the event-triggered control, leading to reducing the unnecessary consumption of system resources.Therefore, it is rewarding to apply event-triggered control scheme to containment maneuvering of multi-agent systems.
Motivated by the above observations, an event-triggered control method is proposed for distributed containment maneuvering of second-order MIMO multi-agent systems.The follower is subject to unmatched nonlinear dynamics and external disturbances. The communication topology among followers and leaders is directed. An event-triggered control method is developed based on non-periodic communication and actuation and a modular design technique,consisting of an estimator module, a controller module, and a path update law. Specifically, the estimator module is constructed by using a neural adaptive control design and the nonperiodic information from followers through event-triggered communication,and the triggering condition of follower communication is designed by using state-independent thresholds.The controller module is constructed based on approximation results of the Radial Basis Function (RBF) network from the estimator module and a third-order linear tracking differentiator. An event-triggered mechanism is introduced for updating the actuator,and the triggering condition is designed based on mixed thresholds. The path update law is constructed for the synchronization among path variables based on the nonperiodic information of leaders through event-triggered communication, and the triggering condition is designed by using a compensation strategy. The closed-loop stability is analyzed by using a cascade stability analysis. Besides, Zeno behavior will not occur during containment maneuvering process.
Compared with the existing results on containment maneuvering control and event-triggered control, the salient features of the proposed method are summarized as follows. Firstly,compared with the existing containment maneuvering control methods developed in Refs. 27–31 for second-order dynamics with continuous communication and actuation, the proposed event-triggered containment maneuvering control method is advantageous over these methods in relieving the burden of communication and actuation. Secondly, compared with the

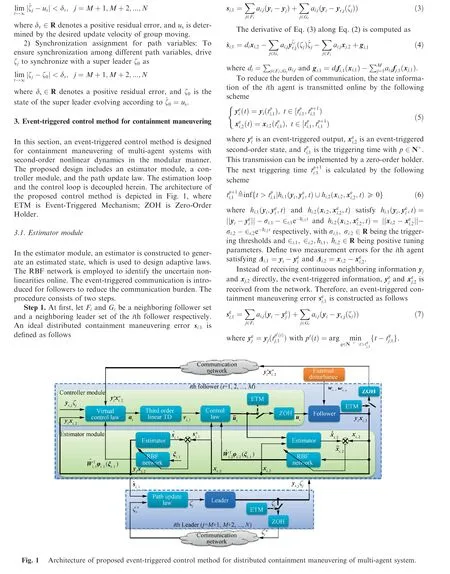





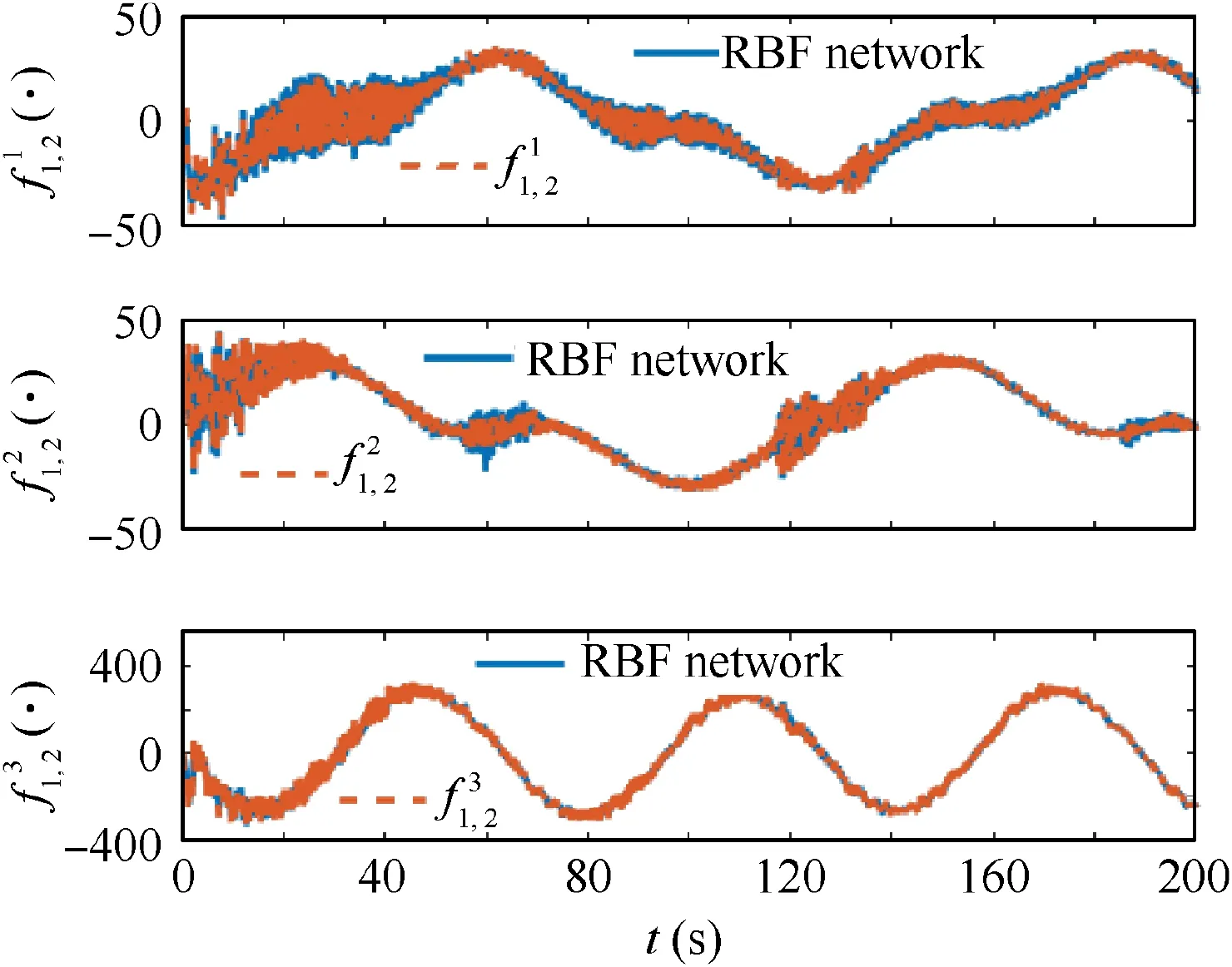
Fig.7 Learning profile of RBF network.
6. Conclusions
This paper presents an event-triggered control method for containment maneuvering of second-order MIMO multi-agent systems with unmatched nonlinear dynamics and disturbances. The event-triggered containment maneuvering control laws are proposed based on a modular design. The estimator module, the controller module, and the path update law are designed based on the non-periodic event-triggered information. According to the characteristics of agents, three eventtriggered mechanisms are designed accordingly. The stability of the closed-loop containment maneuvering system is established based on the cascade stability analysis. The error signals in the closed-loop containment maneuvering system are proven to be uniformly ultimately bounded. Besides, Zeno behavior does not occur. Simulation results are provided to illustrate the effectiveness of the proposed event-triggered control method.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China (Nos. 61673081, 51979020, 51909021, 51939001), and in part by Science and Technology Fund for Distinguished Young Scholars of Dalian (No. 2018RJ08), and in part by the Stable Supporting Fund of Science and Technology on Underwater Vehicle Technology (No. JCKYS2019604SXJQR-01), and in part by the Supporting Program for High-level Talent in Transportation Department (No. 2018-030), and in part by the National Key Research and Development Program of China (No. 2016YFC0301500), and in part by the Fundamental Research Funds for the Central Universities (Nos. 3132019319, 3132020101, 3132020102), and in part by China Postdoctoral Science Foundation (No. 2019M650086), and in part by the Training Program for Doctoral Innovative Talents of DLMU (No. CXXM2019BS001).
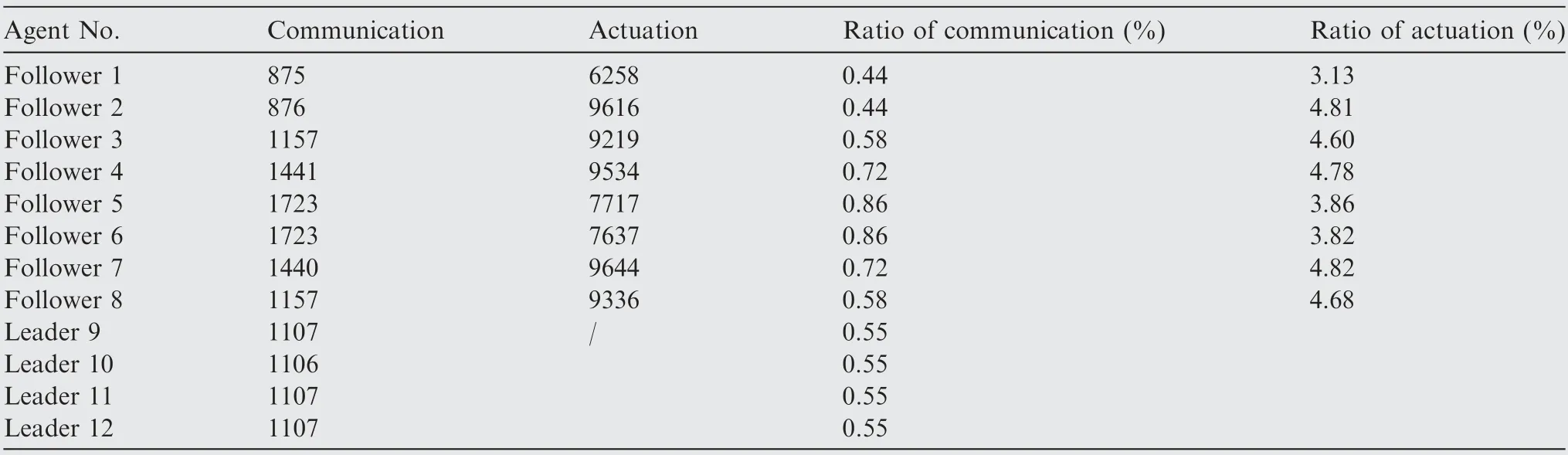
Table 1 Triggering times and ratios of the multi-agent system (total sampling times is 200000).
 CHINESE JOURNAL OF AERONAUTICS2020年11期
CHINESE JOURNAL OF AERONAUTICS2020年11期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Mission-driven autonomous perception and fusion based on UAV swarm
- Adaptive level of autonomy for human-UAVs collaborative surveillance using situated fuzzy cognitive maps
- Coactive design of explainable agent-based task planning and deep reinforcement learning for human-UAVs teamwork
- Two-phase guidance law for impact time control under physical constraints
- Adaptive leader–follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances
- Optimal video communication strategy for intelligent video analysis in unmanned aerial vehicle applications