
A survey of safety separation management and collision avoidance approaches of civil UAS operating in integration national airspace system
2020-12-09 06:57XiangminGUANRenliLYUHongxiaSHIJunCHEN
CHINESE JOURNAL OF AERONAUTICS 2020年11期
Xiangmin GUAN, Renli LYU,*, Hongxia SHI, Jun CHEN
a Department of General Aviation, Civil Aviation Management Institute of China, Beijing 100102, China
b General Aviation Institute of Zhejiang JianDe, Hangzhou 311600, China
c School of Engineering and Materials Science, Queen Mary University of London, London E1 4NS, United Kingdom
KEYWORDS
Abstract Recent years have witnessed a booming of the industry of civil Unmanned Aircraft System (UAS). As an emerging industry, the UAS industry has been attracting great attention from governments of all countries and the aviation industry.UAS are highly digitalized,informationized,and intelligent;therefore, their integration into the national airspace system has become an important trend in the development of civil aviation. However, the complexity of UAS operation poses great challenges to the traditional aviation regulatory system and technical means.How to prevent collisions between UASs and between UAS and manned aircraft to achieve safe and efficient operation in the integrated operating airspace has become a common challenge for industry and academia around the world.In recent years,the international community has carried out a great amount of work and experiments in the air traffic management of UAS and some of the key technologies.This paper attempts to make a review of the UAS separation management and key technologies in collision avoidance in the integrated airspace, mainly focusing on the current situation of UAS Traffic Management (UTM), safety separation standards, detection system, collision risk prediction, collision avoidance, safety risk assessment, etc., as well as an analysis of the bottlenecks that the current researches encountered and their development trends,so as to provide some insights and references for further research in this regard.Finally,this paper makes a further summary of some of the research highlights and challenges.
1. Introduction
In recent years, the civil Unmanned Aircraft System (UAS)industry enjoys a rapid development.Free from the limitations of on-board pilots, UASs have remarkable advantages in terms of the working environment, working hours, manufacturing, and application costs, and are thus more suitable for the implementation of hazardous and complex tasks and operations. With such advantages, UASs have been applied in depth in a wide range of fields such as aerial photography,plant protection, industry, environmental protection and emergency rescue, and are playing an increasingly important role in the national economy and national defense. As an emerging industry, it has been attracting great attention from governments of all countries and the whole aviation industry.1,2By the end of 2018, the number of officially registered UAS and licensed UAS companies in China reached 300000 and 6000 respectively, and nearly 1 million UAS flight hours were achieved in a year.
UAS means a system consisting of Unmanned Aerial Vehicle(UAV),ground control station,command and control data link, and any other component specified in the approved design model.There are different types of UAS with great different capabilities. Based on the operation risk, UAS can be divided into open class, specific class and certification class.The open class has very low operation risk, and operators can carry out flight activities according to the operation rules in altitude, speed, range and other aspects. The operation risk of certification class is as high as manned aircraft operation in air route network and the regulatory rules, and the requirements of certification class are almost exactly the same as manned aircraft. The operation of specific class has moderate risk,and the risk assessment method is introduced to evaluate whether the operation risk scope is within the acceptable range.
Besides, the UAS operation can also be classified into two types: isolation and integration. Isolation operation refers to a single mode operating environment with sparse UAS in isolated airspace without impact on operation of other manned aircraft. Integration operation not only refers to multi-type aircraft including UAS and manned aircraft operation in the connected airspace, but also refers to UAS joining in the air transportation system, such as feeder airport cargo by UAS now in China.
The integration of UAS into the National Airspace System(NAS) will become an important trend in the development of civil aviation.3Though now NAS is trying to adapt to the integration of UAS, in the future we may have a new era of fully unmanned aviation even for the air transportation system.However, now the complexity of UAS operation poses great challenges to the traditional aviation regulatory system and technical means especially for UAS in specific class and certification class as shown in Fig.1.In order to make UAS fly better and farther, the international community has in recent years carried out a great amount of work and experiments in the regulatory standards,air traffic management and key technologies of UAS.

Fig.1 Integration operation.
In terms of regulatory standards, International Civil Aviation Organization (ICAO), Joint Authorities for Rulemaking of Unmanned Systems (JARUS), and some countries or regions like the United States, Europe, and China have made progress and achievements in such aspects as integration oversight, operation concepts, operation rules, procedural standards and personnel requirements.4–6However, due to the lack of mature operational experiences and sufficient data to support the development of regulatory standards, a mature regulatory legal system is yet to be established in a short period, and there is still a shortage of legal guidelines in the formulation of standards.
In the area of UAS Traffic Management (UTM), the United States, Europe, Japan, Singapore and China have all carried out researches on operational concepts and technologies and related system development, with the goal of achieving a safe and efficient integration of UAS flights into the national airspace with manned aircraft.7–10Due to the different performance of UAS, the variety of sensors and a lack of complete operating rules and separation standards, to achieve a transition from a single mode operating environment with sparse UAS to a complex and large-scale mixed environment with multi-type aircraft integrated in the airspace poses a serious challenge to the safe operation of integrated airspace. Maintaining safety separation and avoiding collision are the key technologies to ensure the safety of UAS operation, which is the core of the UAS management system. UAS onboard equipment is rudimentary and different in performance, and their operating environment is more complex and variable,so it is important to conduct a further study on the UAS safety separation and collision avoidance approaches and equipment based on different operating scenarios.
In general, how to ensure a safe separation between UASs and between UAS and manned aircraft and avoid collisions in order to achieve a safe and efficient operation in integrated airspace has become a common challenge for industry and academia around the world.11,12
Safe separation management includes many highly coupled factors such as airspace capacity management, the performance of communication, navigation and surveillance, route planning, overtake rules, collision avoidance strategies, etc.,and each one may lead to the dynamic change of the whole air traffic. It will be very challenging to establish the relationship between safe separation management method and collision risk now, since the whole airspace system is in the accommodation stage and all aspects of integration operation are still being explored.Although the overall research is still in the initial stage, there have emerged a large number of approaches or methods, which are valuable experiences or insights for the follow-up researches.
Therefore, this paper attempts to make a comprehensive study on the key technologies of separation management and collision avoidance in terms of the integrated airspace operation by making a review of the current researches, especially in the scenarios with specific class and certification class UAS in air route and terminal area airspace. Unlike the air transportation system where the separation maintenance rules,equipment and technology are quite mature,the integration of UAS application scenarios brings redefinition of the safety separation criteria among different types of aircraft,different conflict detection and collision avoidance strategy,and new safety risk assessment method.
Hence, as shown in Fig.2, we firstly describe the international progress of the UAS operation regulatory standards and UTM and make the development stage of UAS integration operate clearly. Secondly, safety separation management and collision avoidance approaches are mainly reviewed from the UAS operation and Air Traffic Management (ATM) area on the aspects of UAS safety separation standards, collision risk prediction,collision avoidance,and safety risk assessment.Finally, an analysis is given on the bottlenecks of the current researches and their development challenges.
The rest of this paper is organized as follows:Section 2 presents the UAS traffic management system. Section 3 presents safety separation standards. Airspace situational awareness is given in Section 4. Section 5 presents the collision risk prediction method. Section 6 gives safety separation maintenance method. Section 7 summarizes the risk assessment method for UAV integrated operation. Section 8 presents conclusions with some remarks and future work.
2. UAS traffic management system
2.1. UAS operation regulatory policies and standards
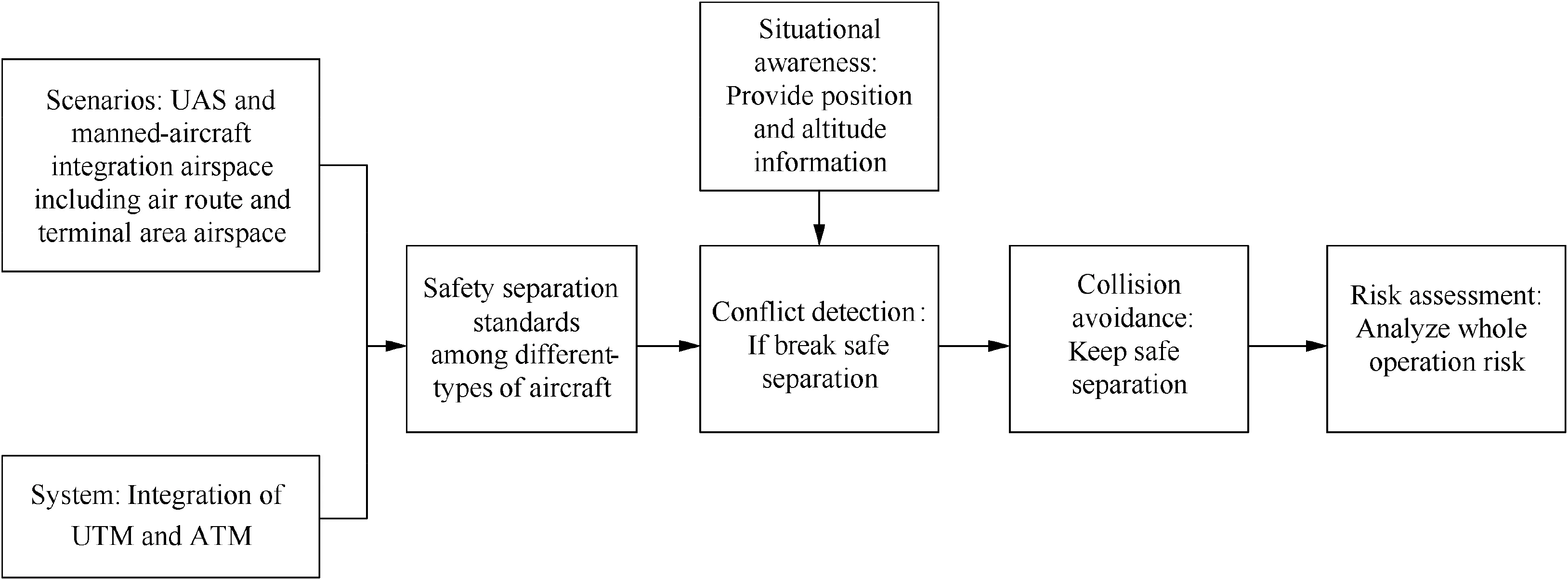
Fig.2 General framework of sub-sections.
In order to give a clearer description of the current situation and trends of related technological development, this paper first summarizes the progress of UAS operational regulations development at home and abroad. At present, countries and organizations around the world have carried out a great amount of researches and issued many documents on the legal norms and regulations for the integrated operation of UAS.
The most common practice in the world today is to classify UAS operations first by the level of operational risks, rather than by the unmanned aircraft themselves. Subsequently,national and regional regulators further classify UAS based on a specific management purpose, such as registration, pilot management, etc. For example, the European Aviation Safety Agency proposed a regulatory framework based on operational risks mainly consisting of such categories as open classes(low risks), specific classes (medium risks), and certification classes (high risks), and put forward a clear regulatory program and technology structure for each category.13
On this basis,each country has gradually constructed a regulatory system which takes operations as the core. Depending on the level of the operational risks, the corresponding management methods will vary. For example, for class C operations, which have a high operational risk, the general practice is to adopt exactly the same regulatory approach as that for manned aircraft. Category B operations are the most resilient,and most countries adopt an approach of risk assessment, i.e. assessing the relevant elements of a particular operation in accordance with the risk assessment methodology,standards and procedures;if the risks of this particular operation are assessed to be acceptable, it will be approved by the regulatory authority or the qualified entity (an organization authorized by the regulatory authority).
However, despite the efforts made by many countries,regions and international organizations to establish a standardized system in the shortest possible time, it is still quite slow in the progress.There are two reasons for that:first,there is no mature regulatory legal system in place at the national and international levels which could serve as a guideline for the development of standards; second, operational practices are not mature enough to collect sufficient data to support the development of standards, including accidents and incidents investigation and reporting data.
2.2. UTM system
Recently,driven by the United States,Europe and some other countries, ICAO and JARUS are both committed to developing UTM framework and operational guiding materials, aiming at improving the safety, security, efficiency, effectiveness,scalability, and privacy of UAS.
Complete UTM should be able to achieve the following functions as shown in Fig.3: UAS and pilots registration,geo-fencing and flying airspace dynamic/static mapping optimization,capacity and traffic flow management,weather information display, flight plan management and tracking,identification and dynamic monitoring of cooperative targets,collision risk detection and collision avoidance of cooperative targets, early warning of near-terrain detection and crossborder flight, various forms of information dissemination services, big data storage, backup, statistics and analysis, and so on.4,5,7Currently the most influential UTM solutions in the world are:the‘UAS Integration in the National Airspace System (NAS) Project’ (UAS-NAS) mainly intended for the midto-high altitude operations, and UAS Traffic Management(UTM) for light and small drones operating at low altitude,both of which are developed by the USA; the U-space System that is being developed the Joint Undertaking(JU)of the Single European Sky ATM Research (SESAR) to be capable of supporting a safe, efficient and large-scale operation of UAS at low-altitude airspace; the program of Urban Traffic Management of UAS by Singapore; the UAS operation management project proposed by China as shown in Fig.4.
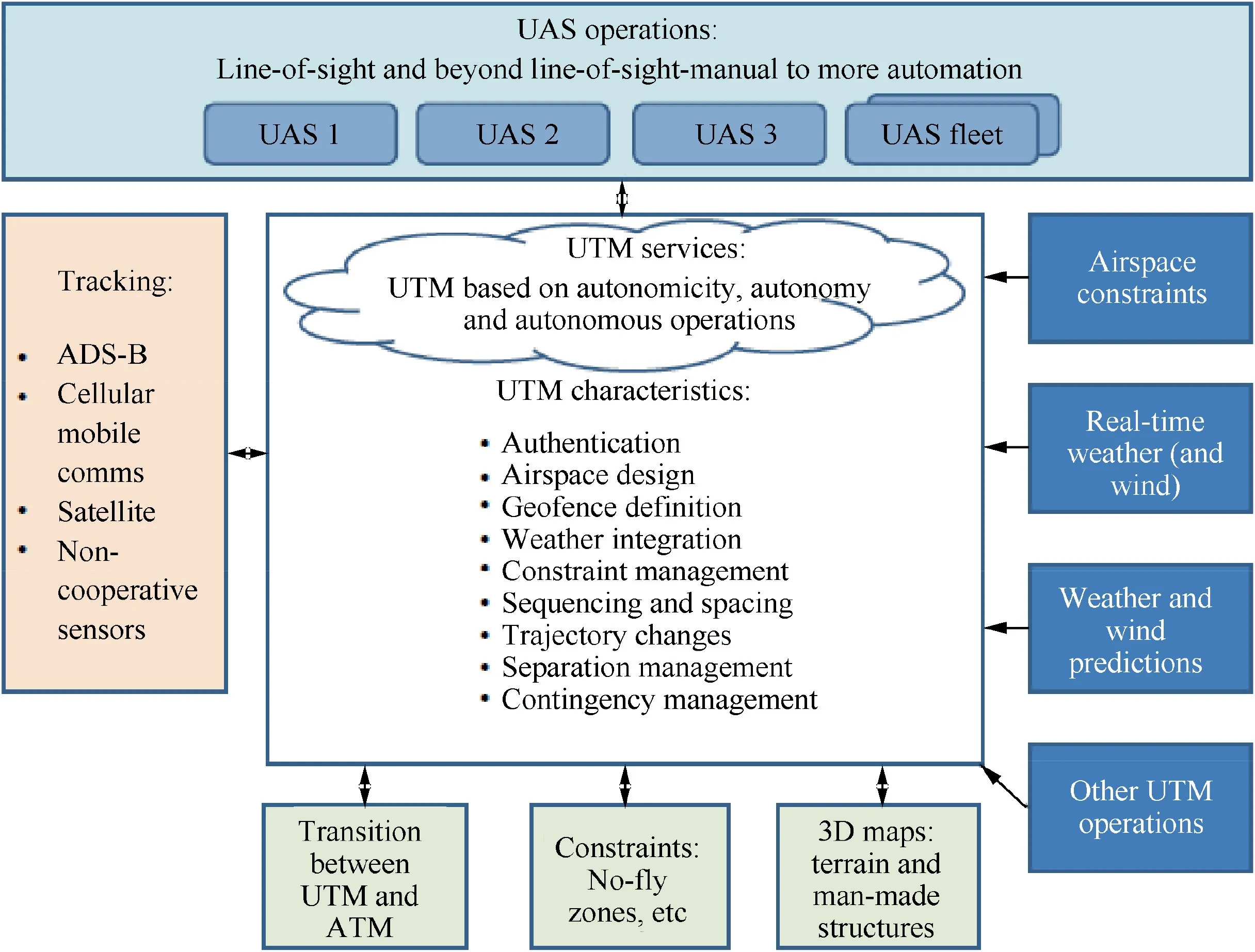
Fig.3 UTM system framework.

Fig.4 UAS operation management project of China.
The efforts made by the above countries and regions on the development and testing of UTM systems helped form a primary framework for the integrated operation of UAS and manned aircraft, and provided scientific basis for the development and application of relevant policies and key technologies.
Besides, it is necessary for UTM to integrate with traditional ATM to realize situational awareness sharing and process interoperability. The convergence of UTM and ATM requires three stages including accommodation, integration and evolvement.In the first stage,UAS is adapted to integrate into the national airspace system via persistent regulation and optimization.And then in the second stage,all types of aircraft will operate harmoniously and efficiently at current ATM system.Finally,in the future,the whole air transportation system will become fully unmanned aviation. Hence, a lot of work needs to be done in terms of operation concept, key technologies, standards, regulations and policies.
3. UAS safety separation standards
Due to the different operational and performance requirements of the integration operation airspace, the separation standard of UAS is far less than that the current air traffic control requires, so the existing safety separation standard and threshold quantification methods of civil aviation do not apply to the UAS Sense and Avoidance(SAA)system and are unable to meet the needs of operations in different scenarios.14,15Therefore, the definition and measurement of the safety separation of the UAS are a new and much-needed field of research.11If the safety separation standard is defined too small, the operational risk will increase, whereas a too large separation standard will affect the efficiency of airspace use.Therefore, how to appropriately define the safety separation standard of UAS to ensure both safety and efficiency of the airspace is the focus of researches in recent years.
The 228 document (SC-228) issued by Radio Technical Commission for Aeronautics (RTCA) sets minimum requirements for the operation of UAS, and technical requirements for the detection and avoidance, but does not establish a safe separation standard for operations.15USA researchers pioneered the efforts in defining the safety separation standard of large UAS integrated into the civil aviation controlled airspace. The concept of well-clear being considered a spacing standard has been widely accepted. The relationship between the separation maintenance safety domain and the collision safety domain is clearly illustrated in Fig.5.16The separation threshold and collision avoidance threshold are the key points where the UAS begins to maneuver to maintain a good separation safety domain or collision safety domain.UAS are considered intruders after crossing the Self-Separation Threshold(SST), when the threatened UAS begins to maneuver slowly to maintain a Well Clear(WC).Similarly,an intruder crossing the Collision Avoidance Threshold (CAT) is considered a threat, and the threatened UAS begins to perform emergency evasive maneuvers to prevent the intruder from entering its own collision safety domain.
There are three typical separation threshold definitions:distance-based, time-based, and time-and-distance combination.9The distance-based approach is to set boundaries, with the drone as the center, in the horizontal and vertical directions, i.e. forming a cylindrical safety area, if which is entered by an intruder,it is judged to be a loss of safety separation.But this approach does not take into account the speed of the intruding aircraft, and thus not applicable in the context of the integrated operation. The time-based approach takes into account the relative speed of the UAS and the intruder by measuring the time to reach the Closest Point of Approach(CPA).If this time is less than the time threshold, it is judged to be a loss of safety separation, but this approach is difficult to visualize. The approach of combining time and distance combines the advantages of the previous two and has become the trend of defining the safety separation of UAS.
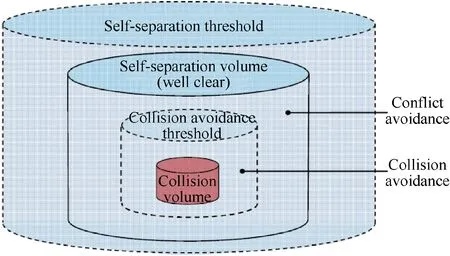
Fig.5 Separation maintenance safety domain and collision safety domain.16
Weinert et al. adopted an air collision risk-based approach for low-altitude operation scenarios,first defining the range of the‘‘well clear”and risk threshold,then simulating and adjusting the initial value through the Monte Carlo method,evaluating the adaptability of the operation and the sensitivity of the hypothesis,and finally getting the well clear’s quantitative definition, that is 2000 ft (1ft=0.3048 m) horizontal separation,and 250 ft vertical separation.17However, this was only a distance-based approach, and the speed of the intruder was not distinguished.
The study on the definition of UAS safety separation threshold for mid-to-high altitude operations was first conducted by the UAS Sense and Avoid Research Panel (SARP).Mun~oz et al.18developed a mathematical basis for the concept of Well Clear,taking the intruder as the origin to construct an Euclid three-dimensional coordinate system, through which the minimum horizontal and vertical separation was quantitatively defined by taking into account the relative motion of the intruder and the UAS based on a combination of time and distance, and then the separation in time is defined according to the closest proximity point. This study has been validated in their DAIDALUS system,resulting in the RTCA standard file DO-365: 35 s, 4000 ft in horizontal separation, 450 ft for vertical separation threshold,and 700 ft for the advisory warning vertical separation threshold.8
Mullins et al. proposed the dynamic separation threshold for the UAS on-board detection avoidance system. They took into account the performance of the intruding aircraft,replaced the distance-based threshold with a time-based threshold, and adopted corner geometry to achieve a solution with less computation.16
Johnson et al. analyzed the existing definition of well-clear separation between UAS and man-made aircraft in class E airspace, and the impact of warning standards on the airspace and the characteristics of encountering.19They set up a simulated environment with simulation tools based on UAS models, flight profiles, and historical radar data, and analyzed the risks and impact of the three well-clear separation definitions made by Federal Aviation Administration Radio Technical Commission for Aeronautics and Traffic Collision Avoidance System II respectively on the integrated hybrid operation of UAS and manned aircraft in the airspace. They also evaluated the impact of the warning logic on drone operators’ maintenance of adequate space between aircraft. The results of the analysis provided guidance for the requirements of SAA sensors and the design of SAA traffic display.
4. Airspace situational awareness
Operation of UAS in the integrated airspace should first have the capability of airspace situational awareness, which helps render reasonable avoidance solutions for UAS based on the surrounding aircraft in order to ensure the operational safety.
The detection system of the UAS is mainly divided into two kinds: collaborative and non-collaborative as shown in Table 1.20
The collaborative detection system means that the UASs are equipped with the same kind of sensors and the communications between UASs are established, which mainly includes ACAS-X U system upgraded specifically for the UAS from the TCAS system, and ADS-B. FAA developed ACAS X system for large aircraft as the next-generation airborne collision avoidance system. At the same time, the ACAS-X U system has been specifically developed for the UAS operating in an integrated airspace.21,22
The UAS with non-collaborative detection systems does not directly establish communications between each other.They detect intruders mainly through the use of optoelectronics, radar, infrared, acoustics, vision and other sensors and multi-source data fusion methods.Their advantage is that they can autonomously sense the aircraft within the detection range(without establishing communications) and other targets, but their performance is affected by the UAS flight attitude and the surrounding environment, and blind detection spots may occur. Besides, some detection systems designed on the basis of multi-sensor fusion are proposed.23
We can see that it is not conducive for non-collaborative detection system to aware overall airspace,so the collaborative detection system is more feasible for complex and large-scale multi-type aircraft operation in the integration airspace.
5. Collision risk prediction method
Collision risk prediction is to determine whether an unmanned aircraft will violate safety separation with the other one and cause conflict according to their flight plans and predicted trajectories in the case of UAS fully mastering the airspace situation information.
Reich firstly proposed the Reich aircraft collision risk model,24in which each aircraft is assumed to be a cuboid with the same size. The collision probability between two aircraft can be expressed as the collision risk between two cuboids,and it is equivalent to the collision risk probability between a particle and a cuboid. A number of researchers have done similar work based on Reich’s model. Combining various uncertainties which may affect flight safety, they changed the Reich’s collision zone into an oval or other shaped protected area defined by the minimum safety separation standard. On this basis, domestic and foreign scholars have proposed many conflict detection methods,25which can be roughly divided into two categories: deterministic and probabilistic as shown in Table 2.
5.1. Deterministic conflict detection method
In deterministic conflict detection method, ideal trajectory is adopted to describe the movement of aircraft. It is assumed that the aircraft moves along the ideal trajectory composed of a series of route points in the flight plan,and the flight speed between the route points is also given.26–29Then, conflictdetection is transformed into determining whether the minimum distance between the ideal tracks of aircraft is less than the safety separation within the predicted time range.
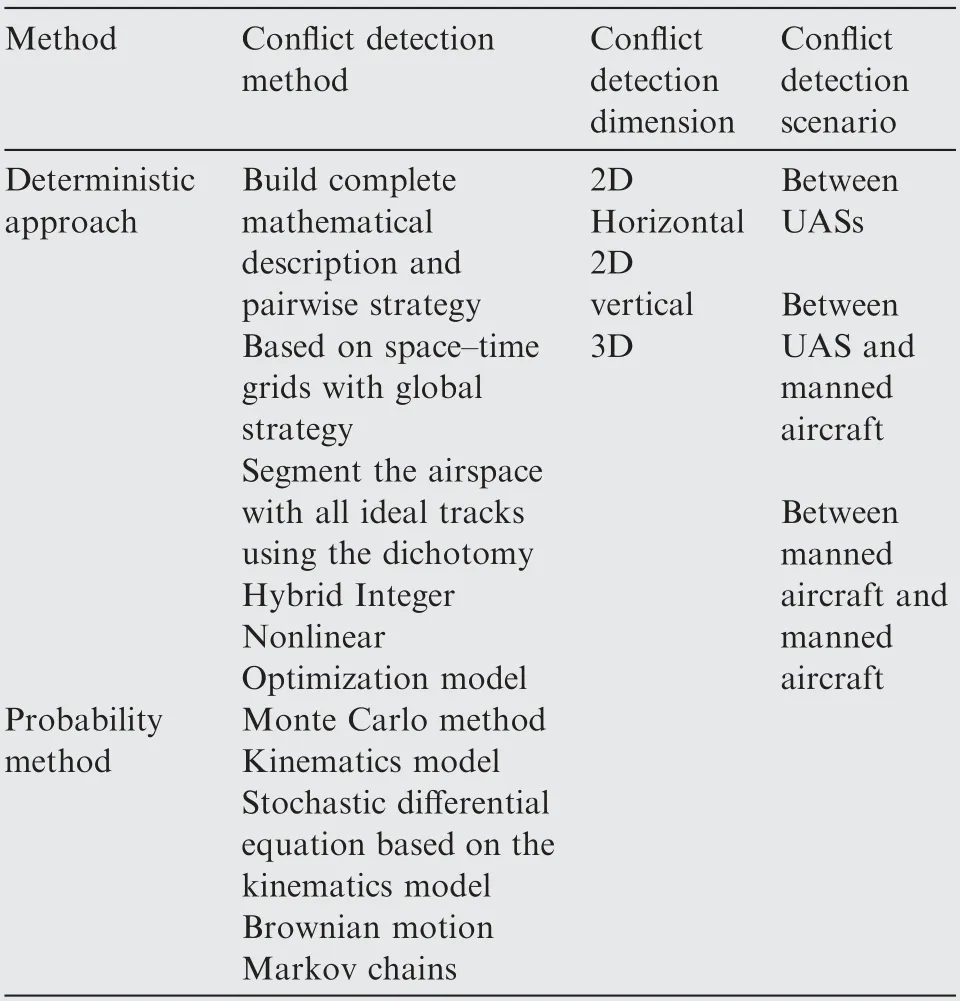
Table 2 Collision risk prediction method.
Dowek and Mun~oz30provided a complete mathematical description of deterministic conflict detection method, that is,the ideal track of aircraft was taken as the center point, and the spherical or cylindrical protection zone of aircraft around the center point was expressed as the safety separation. They also proposed a conflict detection method based on the ‘‘pairwise strategy”.However,when dealing with the conflict detection of multi-aircraft,the method proved to be highly complex in terms of computations, because with this method, the conflict detection had to be done in pairs.
Jardin proposed a conflict detection method based on‘‘global strategy”, which could improve the computational efficiency.31In this method, the airspace was divided into space–time grids, and conflict happens if any grid was occupied by more than two aircraft. The spatial data structure model was further used to describe the ideal track, and then the calculation of three-dimensional distance of aircraft could be simplified to judge the overlap of aircraft arrival time,which greatly reduced the computational complexity.32–34
The dichotomy was adopted to segment the airspace with all ideal tracks,and the iteration terminates until each airspace segment contained only one ideal track. The computational complexity of this method was less affected by the number of conflicting aircraft. In the simulation testing scenario of 10,000 aircraft in German airspace, it only took 14 min to complete all the conflict detection, and the average conflict detection for each aircraft only took 0.08 s, close to real-time detection.35
Alonso-Ayuso et al. presented a hybrid integer nonlinear optimization model for conflict detection.36Han and Bang studied the UAS conflict detection algorithm based on the conventional proportional guidance law, and then they extended the guidance law to tackle the 3D maneuver problem.37Jilkov et al.adopted multiple models to improve the prediction accuracy from the perspective of track prediction,thereby improving the estimation accuracy of the conflict probability.38
5.2. Probabilistic conflict detection method
Probabilistic conflict detection introduces uncertainty in the representation of actual track, including direct superposition of random disturbance on ideal track, and aircraft kinematics or dynamics model described by stochastic differential equation. As one of the advocates of this method, Yang and Kuchar proposed an aircraft track prediction model in the case of free flight, in which different probability densities are used to depict aircraft dynamic parameters, and the Monte Carlo method was adopted to solve the conflict probability.39Paielli and Erzberger used kinematics model to express the aircraft ideal track, and employed Gaussian distribution to describe the random disturbance,which was assumed to be independent both in time and space.40Liu and Hwang introduced a stochastic differential equation to describe the track uncertainty based on the kinematics model.41Besides, Brownian motion was used to portray random disturbances in threedimensional space,and they were assumed to be spatial correlated.42Jilkov et al. improved the estimation accuracy of conflict probability via enhancing the track prediction ability.38
Based on the actual track model, the probabilistic conflict detection method is turned into a conflict probability calculation problem. Conflict is assumed to happen if the conflict probability of the actual tracks is greater than the warning threshold. The existing conflict probability calculation methods include approximate analysis method, grid calculation method and Monte Carlo method. A grid computing method was proposed by Hu and Prandini to calculate the conflict probability through discretization of the random process of aircraft motion in time and space, and then Markov chains were employed to approximate the stochastic differential equation.42However,the computational complexity of this method is high and can easily lead to‘‘dimensional disaster”,especially with the increase of the number of aircraft and the airspace range. According to the aircraft track model and conflict scenario,the Monte Carlo method was adopted to generate actual track samples,43and to estimate the conflict probability. This method can effectively deal with the complex aircraft track model and avoid ‘‘dimensional disaster”. However, in order to obtain high probability estimation accuracy, the Monte Carlo method requires a large number of actual track samples,which would lead to poor efficiency.
A collision probability evaluation method was proposed based on conditional probability. The whole path was divided into a number of discrete path points and the collision probability of the whole path was evaluated by estimating the conditional probability of the current path points without collision.However,this method was mainly suitable for collision in twodimensional plane.44
Besides,polynomial chaos was introduced to estimate collision probability which expressed the solution of stochastic differential equation by polynomial chaotic expansion approximation, and then calculated the collision probability by Monte Carlo simulation.45
6. Safety separation maintenance
Safety separation maintenance is to relieve the aircraft of the conflict that will occur in the local airspace in a short time,on the basis of the flight conflict detection, so as to ensure a safe separation between aircraft. This method is the main means to prevent conflict and collision of UAS in short term.The air traffic flow management in fact is a strategy method to guarantee safe interval; however there are few studies on the control and resource distribution management about civil aviation aircraft and UAS.A distributed implementation method based on integer programming was proposed to solve the problem of large-scale air traffic flow management with the UAS integration into air transportation system.46In terms of the methods of tactical resolutions, it can be divided into centralized resolution and distributed autonomous resolution as shown in Table 3.From the perspective of maneuver strategy,it has six basic strategies including acceleration, deceleration,left turn, right turn, climb, and descent, and the combination strategy.
6.1. Centralized conflict resolution method
In the airspace where the ground control unit is responsible for the safety separation, the ground control unit analyzes the operational situation of aircraft in the airspace, detects possi-ble conflicts, calculates the conflict resolution strategy, and sends the instructions to the aircraft involved in the conflict for execution.The centralized conflict resolution method takes aircraft involved in conflicts as a whole and tends to obtain the overall optimal resolution strategy.47–49
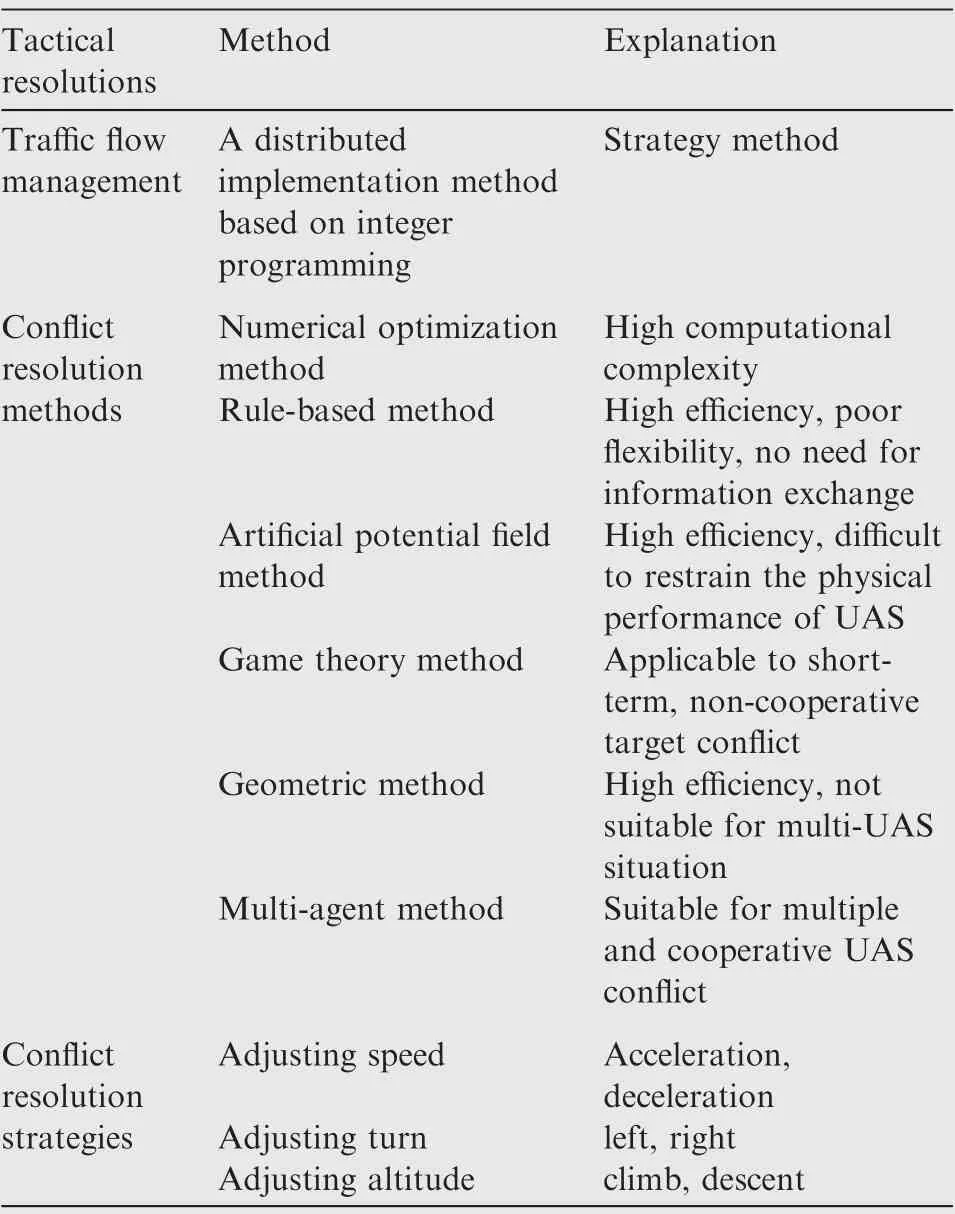
Table 3 Comparison of conflict resolution methods and strategies.
At present, centralized conflict resolution methods generally employ numerical optimization methods including linear programming,optimal control,genetic algorithm,colony algorithm, etc. The method based on numerical optimization is often concerned with obtaining the most economical conflict prevention route, and therefore aims to work out the optimal conflict avoidance strategy,based on optimal control and intelligent calculation by establishing the corresponding target function and constraint conditions. Durand et al. viewed conflict avoidance as a constraint optimization problem with minimum time delay, and adopted genetic algorithm and stochastic optimization techniques to generate avoidance maneuvers.50Frazzoli et al. approached collision avoidance as a convex optimization problem, and made use of random search to calculate the feasible local optimal conflict-free strategy.51Pallottino et al.portrayed conflict avoidance as a mixed integer linear programming problem.52Sislak et al.proposed a non-cooperative conflict avoidance method when the aircraft could not communicate with each other, and adopted the A*algorithm to plan a trajectory that did not intersect with the dynamic prohibited flight area, so as to avoid potential conflicts.53
The advantage of traditional numerical and intelligent optimization methods is to achieve overall optimization.However,due to the complex environment of integration airspace, the different performance of aircraft and the high computational complexity,the numerical and intelligent optimization method have limitations in terms of the feasibility and scalability, and it is difficult for them to solve the problem of rapid iteration of the optimization scheme with time and environmental changes.
6.2. Distributed conflict resolution method
The distributed safety separation maintenance method focuses on the efficiency and safety of individual aircraft, with the advantages of rapid response and short calculation time.However, it does not consider the stability of the entire airspace.54Generally, the distributed conflict resolution method mainly includes rule-based method, artificial potential field method,geometric method,game theory,multi-agent negotiation,etc.55
The rule-based approach is mainly to optimize the set of anti-collision rules based on air traffic and operating rules during the system design stage, and enforce the same rules for all aircraft in the integrated airspace. A research based on this method is made by Zhang et al.who designed a conflict detection and resolution method based on rules for large UAS equipped with ADS-B and TCAS in the integrated airspace,and conducted safety assessment on the operation of UAS.56The rule-based approach has the main advantages of simplicity and easy accessibility, requiring little or even no information exchange between aircraft. The disadvantage of the rulebased approach is its inability to consider the future intention and needs of the aircraft.57
The method based on the artificial potential field mainly regards each UAS as a charged particle,and calculates the field distribution based on the situational information of each UAS,such as the position of other aircraft, weather conditions and the uncertainty.58Collision avoidance of UAS is realized by the repulsive forces between fields. The advantage of this method is simple implementation, but due to the strong coupling of field forces, it is difficult to deal with complex situations. Besides, the method cannot take full consideration of the physical performance constraints of the aircraft, and may cause unfeasible solution. Duong and Zeghal studied the distributed conflict resolution based on the artificial potential field method. The whole process of conflict resolution can be achieved by establishing repulsive fields between aircraft and gravitational fields between aircraft and destination.59
The geometric method mainly considers the specific environment of UAS conflict, and seeks the best collision avoidance strategy via geometric characteristics analysis. The most common practice at present is to consider the conflict between two unmanned aircraft.In the case of multiple unmanned aircraft conflicts, the iterative method is generally used to solve the conflict between two unmanned aircraft, but it cannot guarantee the safety. Bilimoria proposed an optimal collision avoidance algorithm based on geometry in which the change of velocity is minimized with the minimum deviation from nominal trajectory.60Considering that UAS had different collision avoidance efficiency due to their different maneuverability, Park et al.61proposed a vector sharing method to make UAS with a slow speed take more responsibility and accomplish more maneuvers in the same time.Hence,all UASs could bring their respective advantages into full play to maximumly ensure the flight safety.
The application of game theory in the field of air traffic is gradually emerging and has achieved inspiring results. Tomlin et al.62used non-cooperative game theory to solve flight conflicts. In the two-aircraft conflict scenario, based on the twoperson zero-sum non-cooperative differential game theory framework, the accessibility analysis of mixed system was employed to obtain the ‘‘unsafe” subset of state space. Based on the satisfactory game theory, Ref. 63 established the relationship between aircraft by using conditional probability method to express the influence of the current aircraft’s resolution decisions on other aircraft. Being a decentralized and cooperative method, it can effectively solve the conflict problem among a large scale of aircraft.
In the multi-agent-based approach,each UAS is considered as an agent,which can communicate with each other and negotiate collision avoidance strategies by using efficiency functions.64Archibald et al. studied an agent method based on principle negotiation in which different agents in air traffic management can obtain their own interests via time slots negotiation.65Each agent optimizes its own behavior by evaluating the benefits of each decision, and designs cooperative search solution to improve the overall benefits.Cai and Shen66established a high-precision multi-agent framework which could be used for large-scale UAS control. The negotiated collision avoidance approach helps to reduce maneuver costs and avoid inappropriate maneuvers which may exacerbate conflict.However,in the event of a data link failure or data exchange interference, the negotiation may be interrupted. A robust and efficient algorithm based on decomposition of a large multiagent Markov decision process was proposed to generate recommendations for each UAS.67
The trajectory projection method is suitable for the control avoidance strategy based on the airborne vision sensor, which is required to estimate the current state of the intruder and predict the intruder’s trajectory.If the position of the UAS enters the dangerous area,a new heading angle command will be generated immediately to make the UAS leave the dangerous area,and then the UAS will fly back to the original trajectory along the original heading. The method is simple, direct and easy to implement.68
7. Risk assessment method for UAV integrated operation
Risk assessment mainly refers to the quantitative estimation of the impact of the consequences caused by a potential or actual accident by using scientific calculation methods and models.It is an important step to determine whether UAS can be safely integrated into the national airspace system.
The risks are mainly divided into mid-air collision risks and ground collision risks.Mid-air collision risks refer to the probability of collision between UAS and other aircraft, while ground collision risks mainly refer to the probability of UAS hitting the ground.
For the assessment of mid-air conflict risks of UAS in the integrated airspace,Zhang et al.established a cylindrical collision risk model based on conflict zones,and studied the conflict risk between manned aircraft and UAS.56The risk analysis results showed that the large UAS equipped with ADS-B,TCAS and airborne sensing systems did interfere with the operation of other aircraft in the integrated airspace. Especially as the number of aircraft increases, the automatic avoidance system of UAS would need more time to avoid collision and trigger the safety alarm, but the safety level was still acceptable.
Liu et al.proposed an aircraft collision model based on the density of flights in different areas of China’s airspace, and constructed the relative collision area between UAS and manned aircraft and their flight speeds, mainly studying the fatality risk caused by the collision in the air.69For ground collision risks,Liu et al.also assessed the fatality threat from that risk. With consideration of system reliability required to meet a target level of safety for different UASs, a ground impact assessment model was proposed and both fixed-wing and rotary-wing UAS were taken into account under a real scenario. Considering the land and population data of the experimental scenario and the UAS characteristics, casualty area of impacting debris could be obtained as well as the probability of fatal injuries on the ground.
Waggoner conducted mining and analysis on the historical collision data of manned aircraft, and established the mid-air collision risk and ground collision risk models of UAS.70Lum et al.evaluated the risk of ground collision for UAS operating in densely populated areas.71
In addition, Gonc¸alves et al. provided a Petri net-based modeling method for UAS safety assessment process, aiming to describe the frequency of UAS in high collision risks and their abilities to respond to the operational input in case of failure.72
JARUS designed the Special Operations Risk Assessment(SORA) method73which could evaluate the risk scenarios related to a given hazard by visualizing the scenarios and safety risk management measures. The SORA process starts with risk modeling,then evaluates the risks of UAS midair collision and ground collision, and finally puts forward suggestions for risk mitigation. Denney et al. supplemented the current SORA guidance through a mathematically based risk assessment method.74
Besides, an online risk assessment method for entire UAS traffic was proposed using Bayesian belief networks.75
8. Conclusions
To sum up, it can be seen that the safe and efficient operation of UAS in the integrated national airspace is a complex system, involving a great many aspects such as regulations and standards, safety separation standards, collision risk prediction, collision avoidance, safety risk assessment and so on. A lot of research work has been carried out by the industry and academic institutions all over the world,many regulations and standards have been issued, and different model algorithms have been put forward. However, there is still a lot of work to be done. Based on the technical requirements of the integration operations and the development plans of ICAO,the United States, Europe,China and other countries, the following areas may be the key areas of future challenges.
8.1. Risk decomposition
The overall safety level of UAS operation in integration airspace depends on many factors. Given the equivalent level of safety, the equivalent risk is required to allocate reasonably and accurately to all aspects of the integration operation air traffic,such as the performance of the communication system,navigation system,monitoring system,UAS,onboard devices,network design,traffic rules,etc.Hence,current state of the art in each part and the economics of the improvements need to be taken into account. Besides, the safety risk indicators need to be converted into reasonable and feasible performance indicators to guide research and system design.
8.2. Impact of safe separation management method on collision risk
Safe separation management will lead to the dynamic change of the whole air traffic, including airspace capacity management, route planning, overtake rules, collision avoidance strategies and methods,etc.Each regulation will lead to different risks. Therefore, it will be very challenging to establish the relationship between safe separation management method and collision risk. On the basis of the performance of UAS and CNS, it is necessary to simulate the airspace model and traffic based on multi-agent, analyze and evaluate the error of UAS altitude, position and wind speed, establish a comprehensive risk model of collision in integration airspace, carry out the safety evaluation of the whole system operation,and then analyze the correlation between each safe separation management method and collision risk.
8.3. Sense and avoid (SAA)
Since the collision avoidance of UAS cannot be achieved by the traditional way of see-and-avoid of manned aircraft, one of the main challenges for UAS integration into NAS is to improve the UAS SAA capability to ensure that UAS can maintain a safe distance from other manned and unmanned aircraft and prevent mid-air collisions.
Collision avoidance is a large-scale complex multi-agent cooperative control and optimization problem with complicated constraints. Researchers from air traffic management and UAS field have proposed many methods.In the integration airspace, the performance of air vehicles and collision avoidance strategies are becoming richer and diverter. In addition,with the continuous expansion of the application fields and the continuous improvement of operation demand, different operation scenarios will also emerge, such as UAS formation operation which can perform tasks simultaneously with the least time and cost, and the complexity of the collision avoidance in these new air traffic scenarios is greatly increased.Therefore,it is required to propose more methods to realize collision avoidance under different scenarios with high real-time performance,scale scalability and overall safety and efficiency.
Besides, the government and industry are conducting researches on the sensor modes and algorithms involved in SAA, and the concept of AirBorne Sensing and Avoidance(ABSAA) is the main topic. Recent research objectives are flight tests of UAS equipped with different sensor modes,including electro-optical,infrared,radar,traffic warning,collision avoidance systems and ADS-B. The long-term goal is to deploy standardized airborne sensing and avoidance systems.The specific challenges of current researches include the establishment of the definition and performance level of SAA systems, assessment of the use of multiple sensors in SAA systems, and the minimum SAA information set required for collision avoidance maneuvers.
Another research highlight in the future would be the study on the compatibility of different UAS sensing technologies as well as UAS and manned aircraft sensing systems, such as TCAS and LIADR. In the meantime, in order to improve the strategic decision-making ability of multi-airspace-users for conflict avoidance, the SAA logic model and algorithm of different types of aircraft will need to be established.
8.4. Construction and evaluation of safety separation model for integrated operations
The standardization and evaluation of safety separation of manned aircraft and unmanned aircraft are among the fundamental work.Further studies need to be carried out in the following aspects, including UAS safety protection zone model,evaluation model of manned aircraft and UAS safety separation, correlation of safety separation criteria and collision avoidance in different scenarios, airspace collision risk assessment model for integrated operation of multi-type aircraft and UAS, and fast spatial–temporal deduction algorithm for the safety situation of integrated operations.
Finally, a complex and large-scale mixed environment with multi-type aircraft integrated poses a serious challenge to the safe operation, and how to ensure a safe separation between UASs and between UAS and manned aircraft and avoid collisions in order to achieve a safe and efficient operation in integrated airspace has become a common challenge.Many key factors, involved in the safety separation management and collision avoidance problem in the integration national airspace system, are highly coupled with each other and include route network design, air traffic rules, capacity management, collision avoidance, and equipment performance. For example, given the route network and flight missions, traffic rules determine the collision risk of the route,while error and uncertainties will lead to unstable operation safety of the route network. Hence, it is needed to further optimize the design of the route network. Besides, the performance indexes of the communication, navigation, and surveillance systems are the basis of the operation and closely related to the operation risks.
For safe and efficient operation,the standardization of scenarios, devices, rules and processes is required. It can be predicted that the way forward will be very challenging due to the inconsistent pace of progress in all aspects. Despite this,the current researches from UAS operation and air traffic management field on the aspects of safety separation standards,collision risk prediction,collision avoidance,and safety risk assessment will provide some insights for further researches, and the development process of UAS integration into the national airspace system will continue to accelerate.
Acknowledgements
This study was co-supported by the National Natural Science Foundation of China (Nos. U1933130, U1533119 and 71731001)and the Major Project of Technological Innovation,China (No. 2018AAA0100800).
 CHINESE JOURNAL OF AERONAUTICS2020年11期
CHINESE JOURNAL OF AERONAUTICS2020年11期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Event-triggered control for containment maneuvering of second-order MIMO multi-agent systems with unmatched uncertainties and disturbances
- Adaptive level of autonomy for human-UAVs collaborative surveillance using situated fuzzy cognitive maps
- Coactive design of explainable agent-based task planning and deep reinforcement learning for human-UAVs teamwork
- Two-phase guidance law for impact time control under physical constraints
- Adaptive leader–follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances
- Optimal video communication strategy for intelligent video analysis in unmanned aerial vehicle applications