
An aggregate flow based scheduler in multi-task cooperated UAVs network
2020-12-09 06:56XiohunLIZiqiXIEJinYEXinTANGChunhiLIFengzhuTANGRongYU
CHINESE JOURNAL OF AERONAUTICS 2020年11期
Xiohun LI,Ziqi XIE,Jin YE,*,Xin TANG,Chunhi LI,Fengzhu TANG,Rong YU
a School of Information and Communication, Guilin University of Electronic Technology, Guilin 541004, China
b Guangxi Key Laboratory of Multimedia Communications and Network Technology, School of Computer, Electronics and Information, Guangxi University, Nanning 530004, China
c National Engineering Laboratory for Comprehensive Transportation Big Data Application Technology (Guangxi),Nanning 530001, China
d School of Automation, Guangdong University of Technology, Guangzhou 510006, China
KEYWORDS
Abstract Unmanned Aerial Vehicles (UAVs) cooperative multi-task system has become the research focus in recent years.However,the existing network frameworks of UAVs are not flexible and efficient enough to deal with the complex multi-task scheduling, because they are not able to perceive the different features. In this paper, a novel cooperated UAVs network framework for multi-task scheduling is proposed.It is a three-layer network including a core layer,an aggregation layer and an execution layer, which enhances the efficiency of multi-task distribution, aggregation and transmission. Furthermore, an AggreGate Flow (AGFlow) based scheduler is dedicatedly designed to maximize the task completion rate, whose key point is to aggregate flows belonging to one task during the multi-task transmission of UAVs network and to allocate priority by calculating the urgency-level of each AGFlow.Simulation results demonstrate that,compared with that of state-of-the-art scheduler,the average task completion rate of AGFlow based scheduler is raised by 0.278.
1. Introduction
Unmanned Aerial Vehicle (UAV) is one of the most potential emerging technologies due to its flexibility, easy deployment and low cost, especially in dynamic tasks such as target tracking, rescuing and fire monitoring. However, a single UAV is difficult to complete the task with huge computational load and wide flight range with the limitation of load capacity and power supply.1To break through individual constraints,the multi-UAV system is defined as a multi-agent system that can be controlled independently and remotely. With the advantage of stronger survivability, higher extensibility and faster computation,multiple groups of UAVs(numerous clusters of UAVs)can execute complicated task in an efficient way.
There are increasing studies2–6related to the problem of UAV multi-task cooperation recently. Moreover, the existing network framework of UAVs can be mainly divided into star network and mesh network. Both of them have disadvantages in the application of multi-task system.
Star network can be considered as a centralized network,in which all UAVs are connected to one or more base stations,so communication between UAVs needs to be forwarded by these stations. For example, in Iterative Trajectory, Sensing, and Scheduling Optimization (ITSSO),6tasks are assigned to each UAV and need to be executed in a cooperative way. The base stations communicate with each UAV individually.The UAVs send the sensed data back to those base stations. In another study,2a two-layer cooperative network is proposed, which combines UAVs with ground vehicles. These vehicles are connected to UAVs and responsible for the data collection of UAVs,as well as mission command issuing.UAVs are responsible for data acquisition and work as relay node to connect with the ground on special occasions. The data collected by UAVs is transmitted to the vehicle that works as base station through UAV-to-Vehicle (U2V) link, and then it will be processed and sent to the ground vehicle through the Vehicle-to-Vehicle (V2V) link. Moreover, there is a simple centralized UAV network in Load-Carry-And-Deliver (LCAD),7where multiple UAVs work as data transmission nodes and one of the UAVs extracts the data from the source node and transfers it to the destination node.Although the star network is simple and easy to control, it also has the weaknesses of robustness and extendibility. For instance, if one ground central node fails, the communication of nearby UAVs would be interrupted. Also, it is difficult to dynamically adjust and extend the network structure when the task is changed, because data transmission depends heavily on the core nodes and modification of core nodes is impossible in real network.
Mesh network is also known as distributed network, in which UAVs are interconnected directly through numerous links,and only a few UAVs connect to the ground control center. In Refs.3,8,9, one UAV is selected from each cluster of UAVs as a cluster-head, and the information of this cluster is collected by the cluster-head and transmitted to the ground central node through core network. In addition, there is a multi-network communication architecture for heterogeneous UAVs10that form a multi-layer ad hoc network, so the UAV is able to communicate with each other in UAVs.Corresponding to the low layer of multi-layer UAVs ad hoc network, the high layer is composed of the backbone UAV of each UAV. In multi-layer UAVs ad hoc network, only one backbone network directly connects with ground stations.The information exchanged between any two UAVs will not be routed by ground station,and the ground station only processes the information of their own, so the computing and communication overhead of ground station can be significantly reduced. Even though the connection between UAVs can greatly improve the system’s robustness, congestion of the cluster-head still cannot be avoided when massive UAVs attempt to send the sensed data. Therefore, the existing network structure is not good enough to meet the requirements of multi-task computation and data transmission.
In summary, there are two challenges in UAVs multi-task cooperation system. Firstly, the system needs an efficient and flexible network structure that is suitable for the distributed tasks,in which UAVs can be freely arranged and split without impact on operation of the system,also the device fault cannot make the whole system collapse.Secondly,due to a large number of task results, the nodes connected to the ground may cause congestion in transmission no matter in what kind of network architecture.That is the reason why we require scheduler to allocate flow to priority queue according to task features. However, the existing flow scheduling methods like per-flow-FAIRness (FAIR), First-In-First-Out (FIFO) and Shortest-Job-First(SJF)11are not able to perceive the task features because these schedulers are based on single flow that is a traditional abstract.
Inspired by the above consideration, a multi-task cooperative UAVs network structure is proposed in this paper. Based on the new structure, an abstraction of mixed flow and its scheduler are dedicatedly designed to improve the task completion rate. The contributions of this paper are summarized as follows:
(1) In order to meet the demand of task completion, this paper proposes a new multi-task cooperated UAVs network framework, that is, a three-layer network including a core layer, an aggregation layer and an execution layer.
(2) Based on the new UAVs network framework, an abstraction named as AGFlow is proposed, which can perceive the task feature in scheduling.
(3) An AGFlow based scheduler is designed to improve the multi-task completion rate.We implement this scheduler in a trace-driven simulator to evaluate the performance.
The rest of the paper is organized as follows. Section 2 presents the framework of the multi-task cooperative UAVs network. Based on the framework, AGFlow is proposed to aggregate mixed flows with task level features in Section 3.Then design details of the AGFlow based scheduler are illustrated in Section 4. Section 5 evaluates the performance of our scheduler. Finally, the conclusion is drawn in Section 6.
2. UAVs network structure
In popular data collection tasks, such as surveying and mapping, images from decentralized unmanned areas need to be converged, which requires to use multiple groups of UAVs.Same as Mesh network, the collected data must be submitted to command center through the core nodes. To mitigate the congestion, it is necessary to find a cooperative strategy for UAVs. However, the deficiency of real-time cooperation between UAVs may cause a flexible schedule among them and fails to ensure the execution of tasks.To resolve the problem, this paper proposes a task-oriented cooperative UAVs network, in which UAVs are generated with the beginning of new tasks. Fig.1 gives the structure of this network that includes all UAVs in the task but they need not have to be in the same space position.
The multi-task cooperative UAVs network is a three-layer structure including a core layer, an aggregation layer and an execution layer, which can be represented as

Subset C is a set of nodes in the core layer and each node is an airship that acts as a core switch.C is used to distribute the tasks to UAVs.
Subset A is a set of nodes in the aggregation layer and many devices can act as these nodes, such as UAV12, mobile vehicle,13and base stations. A is responsible for connecting C and E, which is generally an ad hoc network and helps to expand the coverage of network.
Subset E is a set of nodes in the execution layer, including several subsets {E1,E2,...,En}, and each subset E is an UAV and responsible for task execution.
The network structure described in Fig.1 is the simplest scenario with only one airship,from which the scenario of multiple airships can be easily inferred.The processes of multi-task cooperative transmission for this new framework can be illustrated as the following four steps:
Step 1. Distribution of multi-task. As a rule, multi-task is generated from the command center user, and forwarded to A by C. Then the multiple tasks are distributed to the UAVs by A.
Step 2.Aggregation of mixed-flow.The UAVs in E and the relay nodes in A form multi-hop self-organizing network through wireless communication, which is the UAV ad hoc network for executing distributed multiple tasks. Generally,the relay nodes are responsible for the task, and the UAVs only work as executor to process the multiple tasks. Then mixed-flow is generated by several results, which can be denoted as {f1,f2,...,fn}.
Step 3. Transmission of mixed-flow. During the process,mixed-flow is transmitted from UAVs to the airship through the relay nodes, and then it is forwarded by the airship to the command center.
Step 4. Task submission.The mixed-flow is received by the command center and will be integrated according to the requirements and sent to the user.
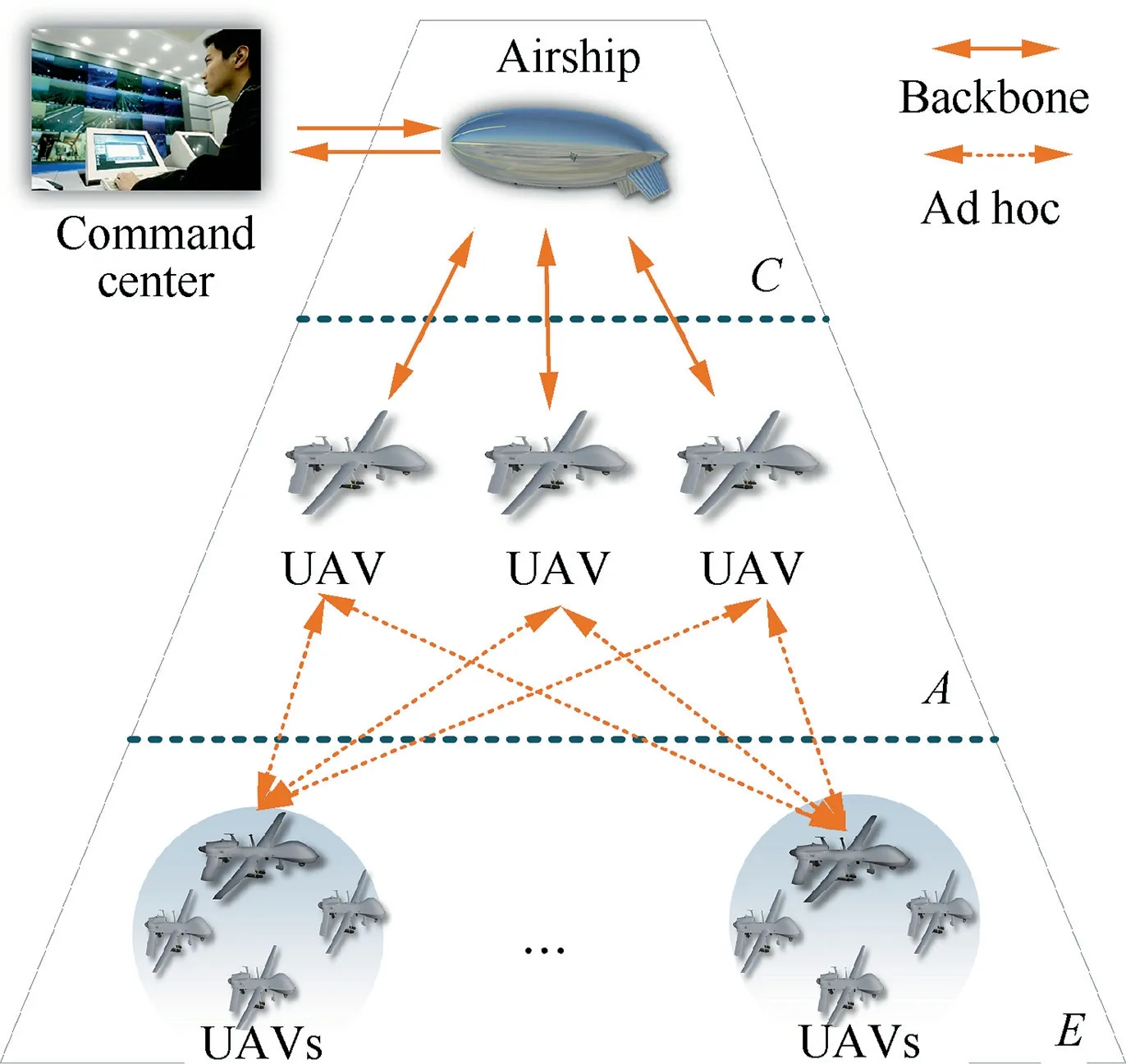
Fig.1 Multi-task cooperated UAVs network.
Unfortunately, once the massive mixed-flow goes through the airship, the scheduling efficiency of the core switches in C will face significant challenge because they are from multiple tasks with different features. Since a task is completed only when all results are converged, missing of one result will lead to task submission failure. Therefore, mixed-flow of a task should be scheduled integrally.
Under the multi-task cooperated UAVs network, there are two critical points to ensure the success of task submission.The first is how to integrate mixed flows into UAV task,whose design is present in the new definition of AGFlow.The second is that the AGFlow based scheduler should consider the different requirements of users that are expressed in multi-task features. In conclusion, we believe that the airship should be enable to schedule mixed-flow with perception of task features.
3. Definition of AGFlow
Since a task can only be considered as completed after all results are converged, the task feature should be considered in mixed-flow scheduling.It is obvious that the latency requirement of task is the most important thing. When multi-task flows arrive at the core switch at the same time, the task with strict deadline and small size should be transmitted prior to increase the task completion rate. Therefore, it is necessary to abstract task features to improve task efficiency.
The abstraction used in current schedulers is flow f, whose structurecanberepresentedbyafive-tuple<startTime, source, des, size, port >in the multi-task network, and it can be found that the features in flow structure are weakly related to the task, so it is difficult to obtain task feature from the flow abstraction. Therefore, we propose a new abstraction AGFlow which is denoted as AF,the aggregation of all parallel flows generated by a UAV, as shown in

ThestructureofAGFlowisasix-tuple<AFID, UAVsID, DES, AT, AS, AD >,which is detailed in Table 1.Based on AGFlow abstraction,it is easy to acquire some important task features such as task size and delay demand.
Fig.2 depicts the aggregation of AGFlow in different scenes. The simplest scene is shown in Fig.2(a), where one UAV is aggregated by one task, and all flows generated by the UAVs is an AGFlow. In addition, as shown in Fig.2(b),it is possible for a UAV to execute multiple tasks simultaneously, and thus flows generated by one UAV can also be separated into several AGFlows.Fig.2(c)is the most complicated situation, where multiple tasks are performed by multiple UAVs, leading to multiple AGFlows belonging to multiple UAVs, and obviously the aggregation of AGFlow is only related to the task.

Table 1 AGFlow structure.
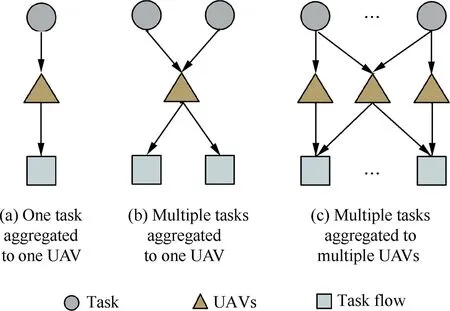
Fig.2 UAVs cooperative multi-task case.
When a number of AGFlows arrive at the core switch simultaneously, tasks with stricter deadline and smaller size should be transmitted for priority, so the task completion rate is possible to be maximized.There are two objectives for multitask scheduler:
(1) Maximizing completion rate. In multi-task system, various tasks usually have different requirements of delay,and they are effective only when their deadlines are met. For instance, most of the control commands of UAVs including tracking, reconnaissance, and turning have strict delay requirements.For example,in tracking task,one of the UAVs which fails to receive instructions until deadline may lead to target missing,as well as task failure.However in the data backup tasks such as video and image collected daily by UAVs, the delay requirements are not very strict, and some of them even have no deadline.It is obvious that the scheduler needs to prioritize the task with high urgency-level.
(2) Minimizing average completion time. Typically, the multi-task traffic can be classified into two categories:14one is large task that generates flows with a large number of bytes,and the other is small task created by timesensitive application with small size. If a scheduler is aimed at minimizing average task completion time,small task should be scheduled for priority, and as a result, more tasks can be completed in a shorter duration. But it is supposed that the large task is bound to be more tolerant of delay. However, it is not always in such case.
Since the urgency-level and bytes size are not uniform features in a task, the two objectives are mutually exclusive, and achieving two goals simultaneously is a difficult problem15.To simplify the design, we only focus on one objective for UAVs scheduler.
Generally, the multi-task cooperated UAVs system is highly dynamic.For instance,in the emergency rescue applications,various urgent tasks such as changing targets and reconnaissance environment are often issued because of changeable environments, most of them have strict latency demand, and the results may decide their success or failure of the emergency rescue action. In multi-task system, the task size should not be the only consideration for scheduling.On the contrary,deadline is more important so that it should be taken into account for priority. As a result, maximizing task completion rate is more appropriate for our AGFlow based scheduler.
In the transport layer, the task completion rate is equal to the AGFlow Completion Rate(ACR).To meet the task deadline, AGFlow can only be completed when ET-AT <AD,where ET is the end time of the latest flow in AGFlow.

Also, we obtain the AGFlow completion time ACT.

There are some examples shown in Fig.3 to explain why the existing mixed-flow schedulers are difficult to be applied directly in UAVs. In addition, the motivation of AGFlow based scheduler is also described through these examples.
Suppose that there are two AGFlows:

FIFO scheduler prioritizes flow with smaller AT, in Fig.3(c)and(d),using AGFlow in FIFO cannot improve the performance, and the average ACT and ACR of flow and AGFlow are both 7 s and 0.5 respectively. It is because FIFO only depends on the AT to make scheduling decisions, and AT is related to the startTime of flow without consideration of other important task features such as AS and AD.
SJF scheduler allocates the flow with smaller size in high priority queue.In Fig.3(e)and(f),using AGFlow in SJF fails to improve the performance. The reason is that SJF only considers the AS without thinking about the importance of AD,and it is obviously incomplete.
FAIR scheduler fairly shares the resources of the network to each flow.16In Fig.3(g),the AF1is completed at 7.5 s which has already missed the deadline, finally the average ACT is 7.75 s and ACR is 0.5. In Fig.3(h),two AGFlows fairly share the bandwidth,overall,the average ACT is 8 s and ACR is 0.5.It is remarkable that the performance of FAIR in AGFlow abstraction is worse than that in flow abstraction, because FAIR focuses on improving fairness and shares bandwidth equally to each AGFlow, so all AGFlows are delayed. It is proven that the fairness is not an important requirement for the delay-sensitive tasks.
The abovementioned analysis show that the existing flow schedulers are limited on using AGFlow, which inspires us to design an AGFlow based scheduler to improve the efficiency of transmission in multi-task network.
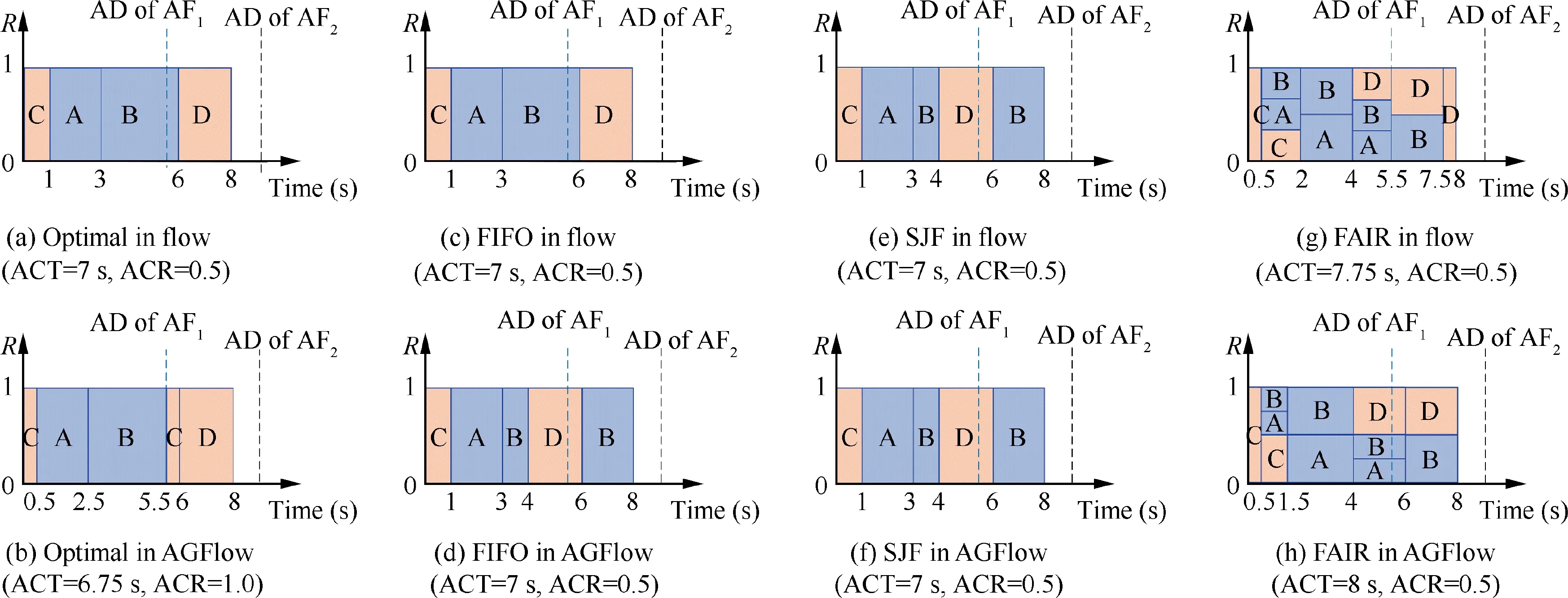
Fig.3 Comparison of different schedulers in two abstractions.

Table 2 Parameters of AGFlows.
4. AGFlow based scheduler
The AGFlow based scheduler is designed in this section to introduce task-level feature into network scheduler.Prediction model of task size is also established by data analysis, achieving the goal of maximizing ACR.We first formulate the problem and explain the definition of urgency weight.
Suppose that Zibe a Boolean that indicates whether an AGFlow which belongs to task Tican meet deadline or not.The goal of our scheduler is described by objective function opj, which makes the sum of Zimaximum.
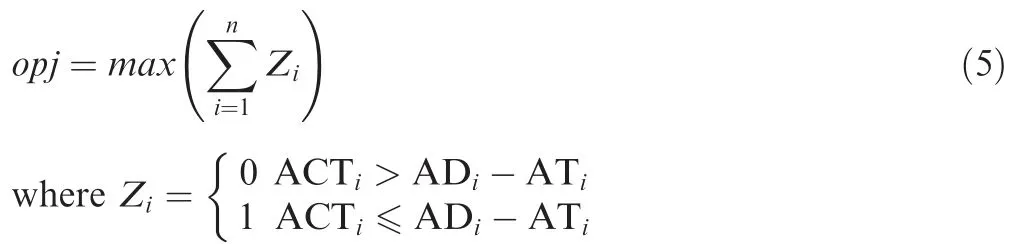

Generally, the tasks of UAVs network can be categorized into several types such as communication, interactive, computation and background. They will be assigned different urgency levels.17Therefore, the priority of task is allocated based on the urgency weight ω in our design, which denotes the urgency level of AGFlow, and the more emergent the AGFlow is, the smaller ω is.

Eq. (6) indicates the computation of ω. The AGFlow scheduling algorithm should take urgency into consideration.An AGFlow with small ω must be transmitted first, but if ω <1, it means that the lower limit is greater than the upper,which indicates that the AGFlow is unable to be completed in valid completion time. Therefore, in our design, the AGFlow with ω <1 will be dropped.
To achieve our goal,AGFlow with small ω needs to be prioritized. Normally, there are 8 priorities provided to queue at commodity switches.18This is the reason why priority queues of our scheduler are 8.
4.1. Scheduler overview
Due to the development of Software-Defined Networking(SDN)19in recent years, the control plane can be decoupled from data plane, and the network management policies and operations are determined by a physically or logically centralized network controller16which is known as Master in our design.
Our scheduler will be deployed at the core switch located on airship.Its overview is described in Fig.4,including a Master,multiple Agents and an Off-line Learning module.
In Agents, Flow Information Collector is responsible for extracting flow information at Network Interface Controller(NIC),and Aggregator is responsible to form AGFlows.After aggregation, Agents send the AGFlow information to Master and background Database.Eventually,according to the priority returned from Master,Agents will schedule AGlows at NIC.
In Off-line Learning module, the historical information saved in Database of AGFlow will be transported to the Learner regularly.After modeling,the AS prediction model will be sent to Master.
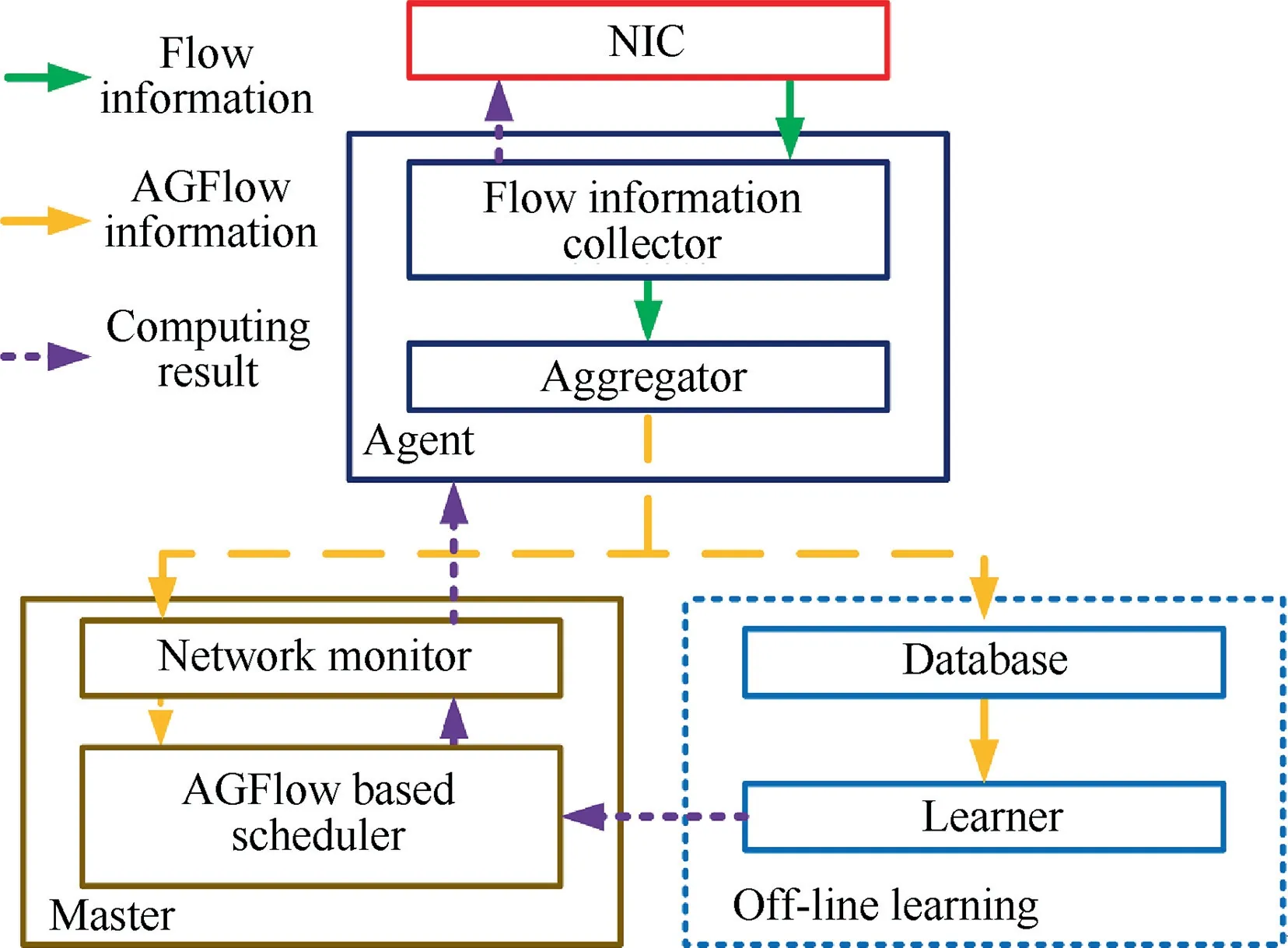
Fig.4 Scheduler overview.
In Master, the Network Monitor forwards the AGFlow information to scheduler,and the scheduler assigns the priority queue to each AGFlow according to ω. Then, the priority assignment of AGFlow is ret urned to the Agents.
4.2. Prediction of AGFlow size
In the calculation of ω,the AD,AT,and Rmaxare fixed values during transmission, but AGFlow size AS is not always known, because a part of UAVs may be affected by the environment or other factors, which results in different mission execution speeds, and mixed-flows in an AGFlow will arrive at the core switch at different time. Hence, an AS prediction model is necessary in our design. Since it is multi-priority scheduler, the multiple classification is adopted in the modeling, which is divided into 8 categories.
Supposing that AS follows the long tail distribution, it is also a common assumption in many related researches.20–22There are 6 features selected in the training model, and all of them form a set MA. Table 3 illustrates the features and their meanings.

The machine learning algorithm used in AGFlow based Scheduling is eXtreme-Gradient-Boosting (XGBoost).XGBoost23is an ensemble learning algorithm based on gradient boosting.
For a data set D with n samples and m features,

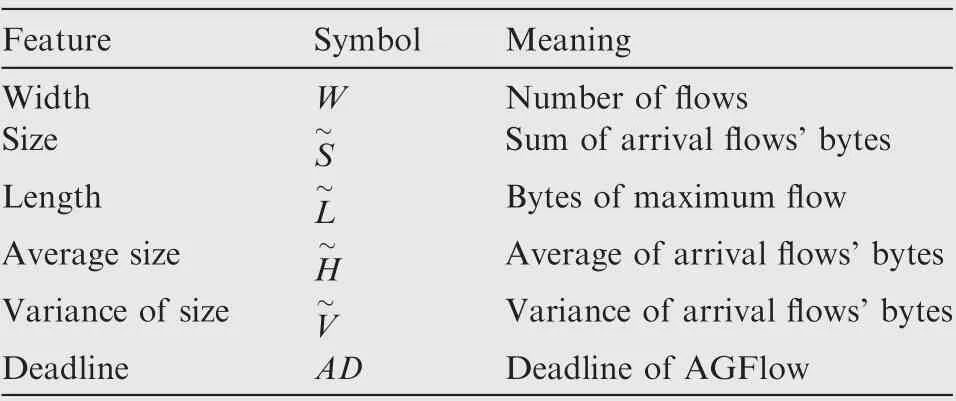
Table 3 Features of training model.
where |D |=n (xi∈Rm,yi∈R). The XGBoost model is a collection of regression trees F.

where f(x)is a regression tree with private tree structure q and leaf weight w.q represents the structure of each tree that maps an example to the corresponding leaf index.Suppose there are K regression trees in our model, and ^y is the prediction result of AFiwith feature set MiA(i ∈[1,n]).

The modeling algorithm is shown in Algorithm 1.Input is a training data set Dtrainwith N samples, and each sample has a set MAwith m features.Output is the model F that is generated by algorithm.
In the algorithm, f0is initialization model, and Sco is used to evaluate the performance of regression tree. In the generation of each regression tree, it is necessary to know splitting by which feature can bring the highest score. newSco is the score of the tree after splitting by leaf node j, where g and h are the first and the second order gradient statistics of the loss function.

where G and H are the sum of g and h in FI.FIis the instance set of current nodes in F.λ is a regularization parameter,and L is the instance set of left nodes after splitting. By comparison with Sco and newSco, the algorithm can decide that the tree is split by which feature. After generating a regression tree,the tree would be added to the boosting model F.Some stopping conditions should be used to avoid the overfitting.
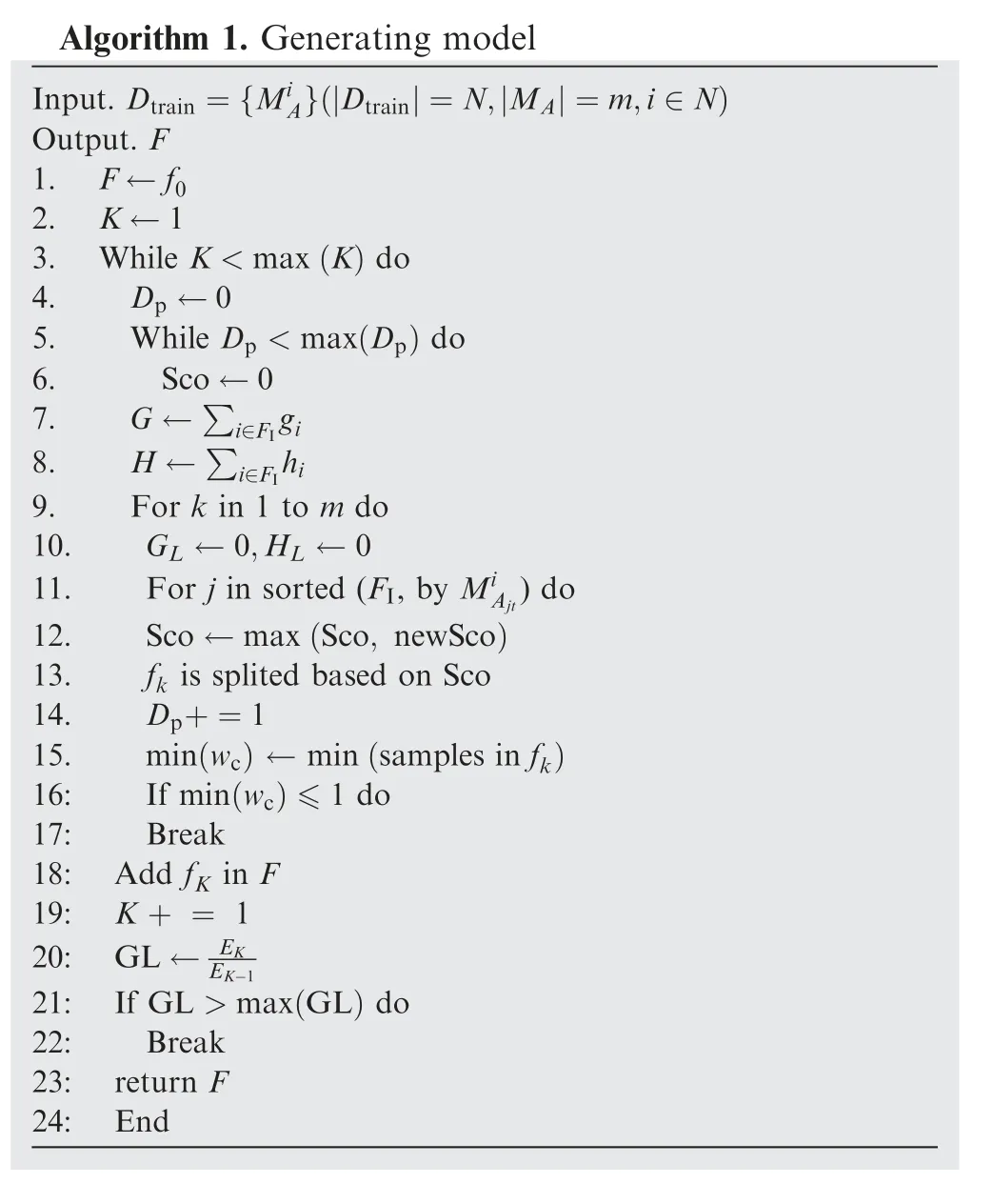
In the generation of single regression tree,the depth Dpand the minimum sample weight in leaf node min(wc) are controlled. Normally, min(wc) is the number of samples. It is default as 1. Dpis the depth of tree, a large value may cause the increase of model complexity, and typically the value is limited in [3,10]. max(Dp) is the limitation of Dp, which is set to 4 in modeling.
In the generation of boosting model,numbers of regression tree K, and the generalization loss GL are controlled. GL means the growth rate of generalization error compared with last error, and a lower value means the better performance of new model. max(K) is the limitation of K, which is set to 100. max(GL) is the limitation of GL, which is set to 0.1.

where EKis the prediction error of test set in current iteration,and EK-1is the prediction error of test set in last iteration.More details of the XGBoost can be found in Ref.23.
4.3. Priority allocation
Since the prediction model is multi-classification,while AS is a specific value, their relationship must be found to calculate ω.So, after prediction, AS of an AGFlow is assigned the value that is the upper bound δ of its classification. When the transmission rate is limited, ω of an AGFlow is obviously only related to the AS. Therefore, when ω is allocated by different priority queues, it should obey the exponential distribution.

where δK= +∞.Suppose that AS is divided into K intervals(K =8,same as the number of priority queues), Eq.(13)gives the condition that one AGFlow AF belongs to the priority queue Q.
The priority allocation algorithm is shown in Algorithm 2.
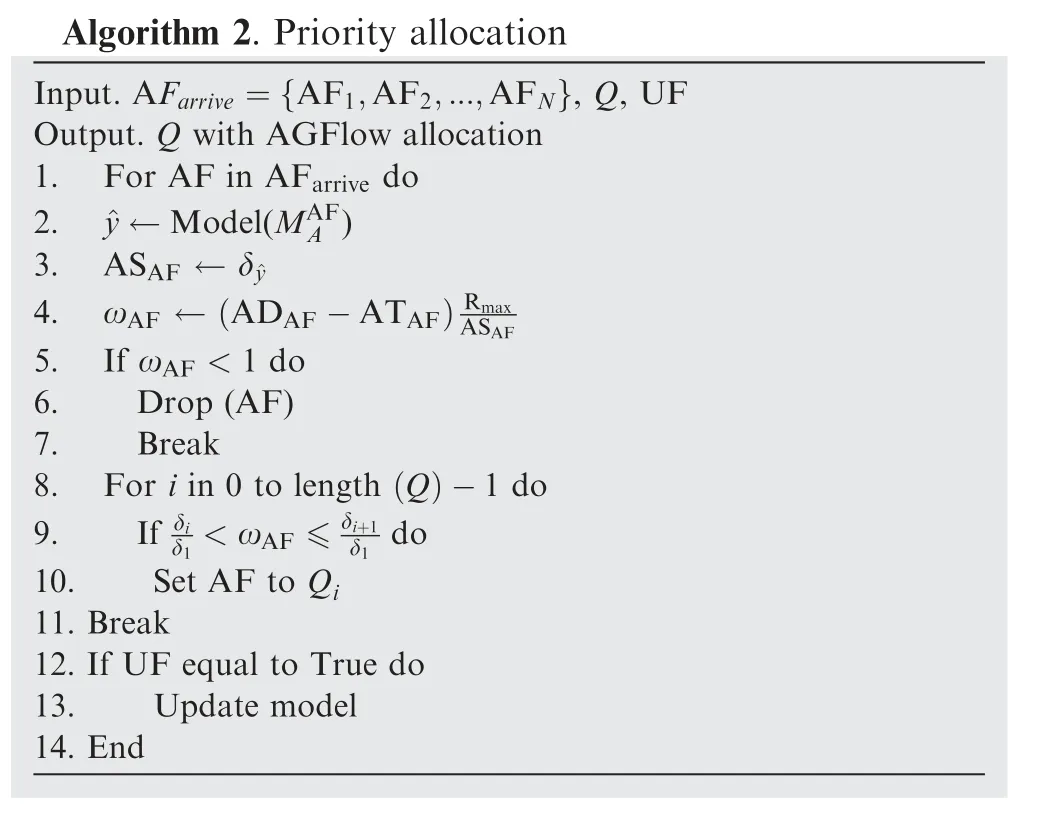
In algorithm, the inputs include a set of new arrival AGFlow AFarrive, a set of current priority queues Q, and updating flag UF. And the output is the queue Q after allocating the new AGFlow. When new AGFlow arrives at switch, their ω will be calculated by prediction model, and each AGFlow is allocated to the queue based on ω. If some AGFlows with ω <1 which cannot be completed on time, the AGFlow are dropped. As a rule, within the same queue, AGFlow is prioritized by SJF. Additionally, the prediction model will be updated to adapt to environmental changes when updating flag UF is true.
5. Experiments
The AGflow based scheduler is implemented in a trace-driven simulator,24and its performance is evaluated by a series of experiments.
There are two kinds of workloads: one is a real multi-task collaborative trace from the Facebook data center, marked with FB; the other is the large-scale trace generated from a feature-based learning traffic generator by learning FB features,25labeled with CUS, and 1000–2000 is the number of AGFlows contained in trace. The test set used in this section is sampled from FB and CUS with 3000 AGFlows.
Same as other works,26,27the AD constraints to be(1 +z)ACTRmax, the ACTRmaxis average completion time of AGFlow with the transmission rate of Rmax. z is a randomly real number between [0,1], following the uniform distribution z ~U(0,x), and a small z means a high urgency-level of AGFlow. x is the maximum value of z, and it defaults to 1 in all tests.
The AS constraint is c×s-a(c >0,a >0),where s is a randomly real number between the interval[0,1]with uniform distribution s ~U(0,x), and the value of x is 1 in the absence of special situation.By fitting the curve of the Cumulative Distribution Function(CDF)of AS in FB data set, the value of c is 1.5×106, and the value of a is-11.
5.1. Performance of machine learning algorithms
The performance of the predicted model is evaluated in the section,in which XGBoost is applied in AGFlow based scheduler. It is a multi-class classification model. 8 categories are used in modeling, and the AS of 8 categories increases from 1 to 8 in turn.There are three representative machine learning algorithms that are used in comparison: Extreme Learning Machine (ELM),29Support Vector Machine (SVM), and Gaussian Naive Bayes (NB).
5.1.1. Comparison with prediction algorithms
The Precision and Recall of four algorithms are also evaluated.The Precision is the ratio of the AGFlow which are true in a category among all AGFLows recognized as in the category.The Recall is the ratio of AGFlow in a category which are correctly recognized.
The average results are shown in Fig.5. Moreover, the 10-Fold-Cross-Validation is used in test. The obvious conclusion is that the best performer is AGFlow based scheduler with extremely high Precision and Recall,and both of them are over 0.9.Next is SVM,which shows high Precision which is close to 0.9, but it is unfortunate that it has a significant performance degradation in Recall which is 0.7. Furthermore, ELM performs better in Precision which is 0.8, and NB is mediocre.
5.1.2. Impact on ρ
To know the impact of ρ, we change ρ from 0.1 to 1.0 in training set and keep ρ in test set to 1.0, so the training set and test set are identical when they have the same ρ, which means that the accuracy is 1.0.
The results are illustrated in Fig.6. It can be seen that XGBoost achieves the accuracy more than 0.8 when ρ =0.1,while accuracy of other algorithms is less than 0.7. With the increase of ρ from 0.1 to 0.5, the accuracy of XGBoost rises rapidly, close to 1.0. However, the accuracy of other algorithms cannot reach 0.8 until ρ >0.6. The results illustrate the higher performance of XGBoost than other machine learning algorithms in multi-task recognition,and it is also the reason why we choose it.
5.2. Performance of scheduler
There are four schedulers in comparison,including SJF,FIFO,FAIR, and AGFlow based scheduler. And two metrics are applied to the test. One is ACT, and the other is ACR.
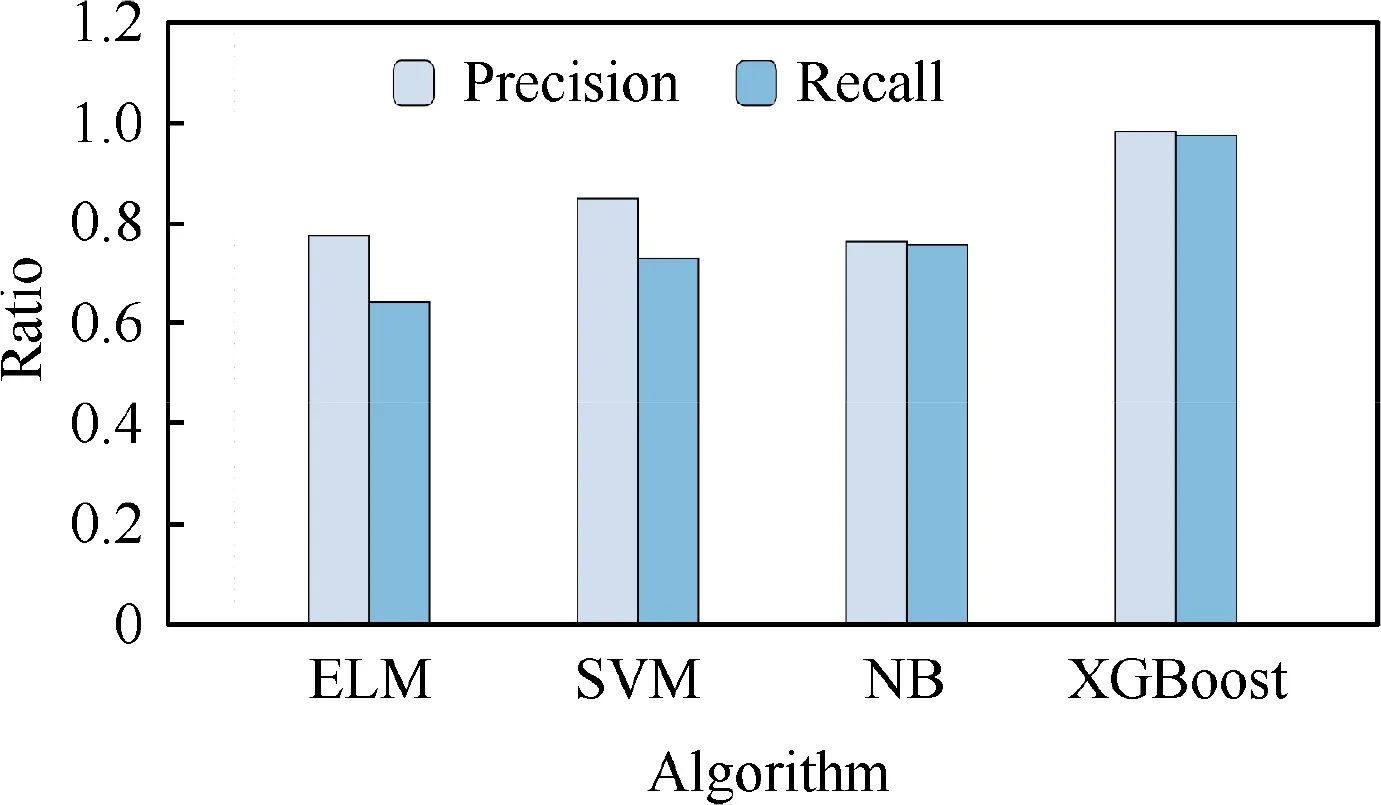
Fig.5 Comparison among four algorithms.
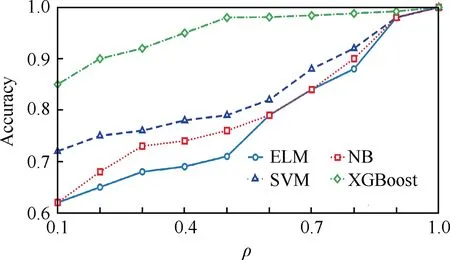
Fig.6 Impact on ρ.
5.2.1. Comparison of schedulers
The ACR changes of different schedulers during experimental time are shown in Fig.7. As expected, the AGFlow based scheduler always keeps the highest ACR among all schedulers,whose ACR achieves 0.85 when transmission time is 100 min.Moreover,the performance of SJF is better than that of FIFO because its scheduler also considers AGFlow size.The FAIR is the worst because the scheduler shares bandwidth fairly without consideration of task priority, resulting in a huge delay of most AGFlows.
In our observation duration, the final ACR of the SJF,FIFO and FAIR schedulers are 0.73,0.6 and 0.15 respectively,and the average ACR of AGFlow based scheduler is 0.278 higher than that of other schedulers except FAIR.
Fig.8 shows the CDF of ACT compared with four schedulers, where the rising speed is the task completion speed. It can be seen that the graph of AGFlow based scheduler is similar to that of the SJF, even AGFlow is sometimes faster than SJF, and SJF focuses on decreasing ACT. The result proves that our design would not make the significant increment of task completion time. We believe that there are two main reasons that can explain this result. The first is the positive association between size and deadline of some tasks, resulting in the similar scheduling. The second is that AGFlow based scheduler will drop the tasks that are impossible to be completed before deadline instead of transmitting them continually, which helps to save resources and accelerate the completion of other tasks. Not surprisingly, the FAIR scheduler is the slowest, because its scheduling does not categorize tasks.
5.2.2. Impact on parameters
There are two tests to evaluate how parameters influence the scheduler performance.
One is the impact on network load. By altering ξ from 0.4 to 2.0, the network load will also be increased. Under large load, the core switch is easier to be blocked by numerous AGFlows,decreasing less AGFlow that completed punctually.As shown in Fig.9, ξ =1.4 is a turning point, ACR of all schedulers decrease obviously when the network load is more than 1.4.However,AGFlow based scheduler always maintains the highest ACR under different loads, while other algorithms are greatly affected by heavy load. It is because the AGFlow based scheduler is able to give up the impossible tasks in time,achieving to save resources for other AGFlow and enhance ACR.
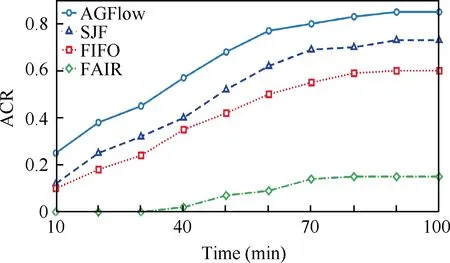
Fig.7 Comparison of ACR.
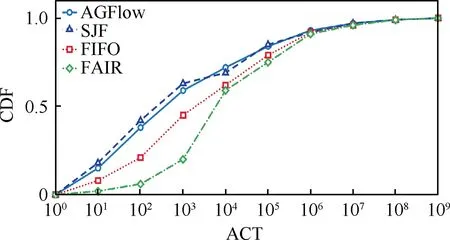
Fig.8 Comparison of ACT.
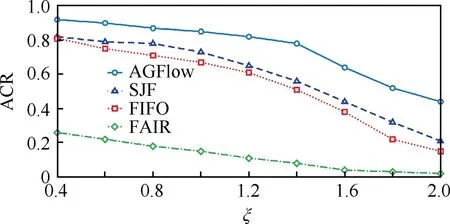
Fig.9 Impact on ξ.
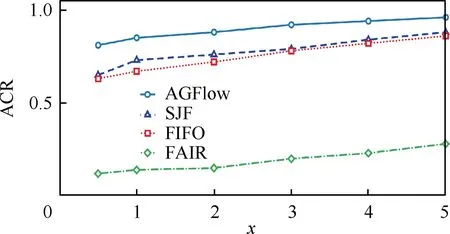
Fig.10 Impact on x.
The other is maximum value of z. According to the setting of AD, a large x would lead to the increase of AGFlow with looser deadline.The results are shown in Fig.10,and AGFlow based scheduler still has advantages even if the conditions become less strict. The major reason is that AGFlow based scheduler considers the urgency-level of AGFlow and assigns their priorities to meet delay requirements exactly, which can prevent bandwidth from being occupied by the AGFlow with low urgency-level.
6. Conclusions
(1) To meet the ever-increasing demand of UAVs cooperative multi-task system and enhance flexibility and efficiency of UAVs network, we present a multi-task cooperated UAVs network. It is a three-layer network including a core layer, an aggregation layer and an execution layer,which enhances the efficiency of multi-task distribution, aggregation and transmission.
(2) To perfect the framework design,AGFlow and AGFlow based scheduler are proposed for improving the multitask completion rate. Machine learning algorithm is used to precisely estimate the task urgency-level.
(3) The effectiveness and stability of AGFlow based multitask cooperated UAVs network are validated by several experiments. Comparison results illustrate that the proposed scheduler can significantly increase the task completion rate and achieve effective multi-task transmission.
(4) The future works will focus on the detailed design of the UAVs network, for example the node placement on aggregation layer and further exploration for the internal structure of UAVs.
Acknowledgements
This work was co-supported by the National Natural Science Foundation of China (Nos. 61762030 and 61971148), the Guangxi Natural Science Foundation, China (Nos.2019GXNSFFA245007,2018GXNSFDA281013and 2016GXNSFGA380002), and Key Science and Technology Project of Guangxi, China (Nos. AA18242021, ZY19183005,2017AB13014,2018JJA70209,AA19110044and AA19110046).
 CHINESE JOURNAL OF AERONAUTICS2020年11期
CHINESE JOURNAL OF AERONAUTICS2020年11期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Event-triggered control for containment maneuvering of second-order MIMO multi-agent systems with unmatched uncertainties and disturbances
- Battery package design optimization for small electric aircraft
- Coactive design of explainable agent-based task planning and deep reinforcement learning for human-UAVs teamwork
- Two-phase guidance law for impact time control under physical constraints
- Adaptive leader–follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances
- Optimal video communication strategy for intelligent video analysis in unmanned aerial vehicle applications