新型机电一体化微磁力矩器设计与实现
2020-11-24 03:34袁德虎武海雷沈国明刘超镇
上海航天 2020年5期
袁德虎,孙 俊,武海雷,沈国明,刘超镇
(1.上海市空间智能控制技术重点实验室,上海 201109;2.上海航天控制技术研究所,上海 201109)
0 引言
磁力矩器是现代微小卫星利用地磁场来实现姿态控制的主要执行部件,已发射的微小卫星中大约2/3 都装有磁力矩器[1-4]。磁控经常作为微小卫星姿态控制的主控手段、备份手段和应急手段[5-8]。它不同于动量轮,没有活动部件,可靠性高功耗低;相对于喷气推力器而言,更适合长寿命工作,而且也不会对光学仪器造成污染[9-11]。
文献[12-13]运用多目标优化设计的方法对空芯磁力矩器进行了设计,然而空芯式磁力矩器和磁棒式磁力矩器的结构组成差异较大,由于磁棒中磁芯材料的磁滞作用的影响,磁棒的控制算法比空心线圈要复杂,所以文献中的设计与实现方法并不适合磁棒式磁力矩器。文献[14]对磁棒式磁力矩器进行了优化设计,但是所设计的磁力矩器磁矩较小,仅适用于立方体纳星,难以满足微小卫星的需求。
本文结合某微小卫星平台的应用需求,采用了机电一体化概念对微型磁力矩器进行了设计[15];采用了单绕组线圈,对磁芯参数和线圈参数进行了最优设计,另外还设计了脉冲宽度调制(PWM)换向驱动电路;最后设计了一种简单易行的磁矩测试方法,并对所研制的微型磁力矩器进行了测试,验证了所提出的设计方案的合理性与有效性。
1 磁力矩器工作原理
磁力矩器是用来产生磁偶极矩,进行姿态和角动量控制,从而补偿卫星残余姿态偏差和减小环境干扰力矩所引起的姿态漂移,同样,其也可以对动量交换系统进行卸载。磁力矩器的磁性线圈控制系统,是利用星体中磁线圈产生的磁矩与外界地磁场相互作用所得到的控制力矩来使卫星再定向,由于它们使用地球的天然磁场,因此在高轨道使用效率不高,而适用于低轨道的微小卫星。磁力矩器产生的磁矩矢量M与地磁场矢量B相互作用而产生控制力矩T,其关系为

常规的磁力矩器功能原理图如图1 所示。磁力矩器接收GNC 计算机提供的控制电流信号,该电流信号流入磁力矩器线圈,输出与其成正比的磁矩,以达到控制磁矩的目的。磁力矩器正交安装在卫星内部,通电后在地磁场作用下产生控制力矩,用于动量轮卸载和卫星姿态的磁控制。它由三根磁力矩器组成,一根沿俯仰轴(X轴)安装,另两根分别沿滚动轴(Y轴)和偏航轴(Z轴)安装。在正常工作状态下,X轴、Y轴和Z轴各有一个磁力矩器工作。

图1 磁力矩器功能原理图Fig.1 Schematic diagram of the function principle of the magnetorquer
2 机电一体化设计
传统的磁力矩器是采用分离设计方式实现,其驱动控制电路板和磁力矩器的机械结构是独立分开的,驱动控制电路板位于姿轨控计算机内(如图1所示)。因此,作为磁力矩器功能单元,磁力矩器并非是独立完整的。本文采用机电一体化设计理念,通过将驱动控制电路板内嵌于支架端面上,实现了磁力矩器结构和驱动电路的集成化和整体结构的小型化,同时实现了磁力矩器功能单元的独立完整性。对卫星的研制而言,磁力矩器实际应用起来更加简便,只需要PWM 控制信号即可,而不再要求上位机有驱动功能,这样也减小了姿轨控计算机的设计复杂程度。
所研制的磁力矩器的实物图如图2 所示。
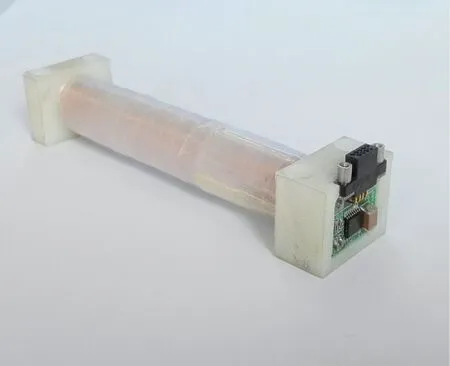
图2 磁力矩器实物图Fig.2 Physical picture of the magnetorquer
如图3所示右视图,它由单绕组线圈2、左支架1、右支架4、PWM 驱动控制电路5 和磁芯3 组成。不含PWM 驱动控制电路板的右视图如图4 所示,6 为引线孔,绕组的引线通过该孔与驱动控制电路板相连。图4 的A-A剖面图如图5 所示。图5 中:7为驱动控制电路板卡槽,PWM 驱动控制电路板内嵌于该槽内,并胶结固定在右支架上;8 为磁芯的卡槽,磁芯利用过盈配合与左右两支架紧固联接。驱动控制电路板的接插件采用低成本、小型化、轻量化的J30V2-9TJS-P2 型接插件,也有助于缩小体积,减少质量。

图3 磁力矩器示意图(含驱动控制电路板)Fig.3 Sketch map of the magnetorquer (with driving control circuit board)

图4 右视图(不含驱动控制电路板)Fig.4 Right side view(without control circuit board)

图5 图4 的A-A 剖面图Fig.5 View of theA-A cross-section in Fig.4
3 多约束条件下的线圈参数和磁芯参数最优设计
以给定的磁力矩器的质量和功耗限制为约束条件,以磁矩M取得最大值为优化目标,根据磁矩、质量和功耗的数学模型对线圈参数进行最优设计,即
优化目标:

约束条件:

式中:M、m和P分别为磁力矩的磁矩、质量和功耗;mmax为磁力矩器所允许的最大质量;Pmax为磁力矩器所允许的最大功率。

式中:r为磁芯半径;N为线圈匝数;i为线圈电流;U为供电电压;γ1为磁芯密度;γ2为线圈密度;Rw为线圈半径;a为绕线后磁力矩器半径;l为磁芯长度;k1为与磁芯材料有关的参数,具体形式为

式中:μr为磁芯相对磁导率;Nd为退磁系数,

将已知具体参数带入式(2)~式(6),以r、l、Rw、a为变量,采用穷举法进行寻优,再结合漆包线导线的工程规格,确定最终参数见表1。

表1 磁力矩器参数Tab.1 Parameters of the magnetorquer
4 PWM 换向驱动控制电路设计
如图6 所示,GNC 计算机产生PWM 控制信号输出给H 桥电路,继而驱动磁棒线圈输出磁矩,同时可以完成磁棒线圈电流采集并进行遥测输出。驱动电路采用数字电路的方式实现,它与外界通过数字接口进行数据交互,减少了线圈对外界电路的影响。而常规的电流幅度驱动控制方式,其模拟信号受磁棒线圈感性负载的影响较大。另外电流幅度控制电路由于要实现电压放大,将会造成电路的效率不高(功率运放的效率不高,自身功耗较大),而且与GNC 计算机的接口相对较复杂。PWM 驱动电路则效率高、功耗低,而且与控制器接口简单,控制更加简便,通过调整PWM 波的占空比即可调节驱动电流的大小。由于采用了换向驱动控制设计,因而传统的双绕组就不再需要了,线圈采用单线连续绕制方式即可,这样线圈的重量和体积则都减少了一半,也便于实现磁力矩器的小型化。

图6 磁力矩器信息流程图Fig.6 Information flow chart for the magnetorquer
H 桥芯片选用TI 公司的DRV8848 双路电机驱动器。该芯片具有3 μA 低功耗睡眠模式,可将部分内部电路关断,从而实现磁力矩器非工作状态下极低的静态电流和功耗。芯片管脚功能图如图7 所示。磁力矩器中电流控制接口与IN1 和IN2 相连,通过IN1 和IN2 的不同组合来控制线圈中的电流方向,通过IN1 或IN2 的PWM 波来控制线圈中电流的大小。IN1 和IN2 的逻辑组合见表2。
PWM 方波的频率最好大于20 kHz,推荐使用50 kHz,最大250 kHz。按如图8 所示的要求进行操作,控制时序推荐见表3。
电流采样芯片选用Allegro 公司的ACS712 型电流传感芯片。由于所设计的驱动电路有电流采集功能,因而可以实现磁力矩器的闭环控制,相对传统的开环控制策略控制精度更高。

图7 H 桥芯片DRV8848 管脚功能图Fig.7 Pin function diagram of DRV8848 H-bridge chip
5 测试方法

图8 控制时序图Fig.8 Control sequence diagram

表2 PWM 控制逻辑组合Tab.2 PWM control logic combination
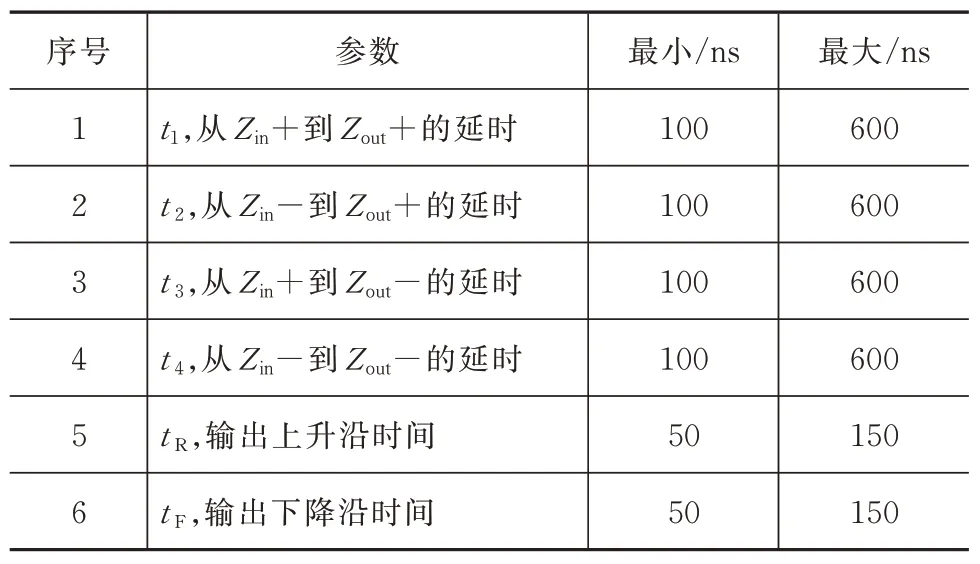
表3 控制时序Tab.3 Control time sequence
根据磁棒式磁力矩器所产生的磁场强度与磁矩之间的关系,设计了磁矩的测试方法。测试方案框图如图9 所示。GNC 计算机输出PWM 控制信号给磁力矩器上的驱动板,电流表可以测得通过线圈的电流大小,利用高灵敏度磁通门磁力仪测量磁力矩器所产生的磁场强度H,结合磁力仪的探头至磁力矩器中心点的距离R,可以得出磁力矩器在不同大小的通电电流时的磁矩为

实测时,探头和磁力矩器需要水平放置在一条直线上。为了便于计算,R可以取0.585 m,0.5853=0.2。相对于传统的近场分析法,该测试方法操作更加简便,试验成本更低。

图9 磁矩测试原理图Fig.9 Schematic diagram for magnetic torque test
6 测试结果
所研制的机电一体化微型磁力矩器已成功应用于某60 kg 的微小卫星。以下分别给出磁力矩器的电流换向能力测试和磁矩测试结果。
6.1 电流换向能力测试
测试结果见表4,由表4 可以看出,PWM 驱动控制下的磁力矩器的最大换向频率为8 Hz,当频率大于8 Hz 时线圈中的电流已不能进行换向。所以电路开关允许的最小时间不小于125 ms,即由正向变为反向时至少应该有125 ms 的无电流时间,否则会因电路中电流变化太快,造成磁棒(感性负载)产生的反电动势过大,从而影响驱动电路的正常工作。

表4 电流换向能力测试Tab.4 Current direction variation ability tests
6.2 磁矩测试
按照第4 节中所述的测试方法对所研制的磁力矩器进行测试,测试时IN1 脚进行PWM 调制,IN2 一直拉低,可以得到正向磁矩。针对5、10、20和50 kHz 等不同的PWM 频率进行测试,PWM 方波的占空比和输出磁矩的关系如图10 所示。
由图10 可看出,当PWM 频率f=50 kHz 时,占空比和磁矩关系曲线的线性度较好,具体测试数据见表5。表中可见:当占空比小于50%时,输出磁矩变化很小;大于50%时,磁矩随占空比呈线性关系增大;当占空比为100% 时,磁矩可达最大值1.718 A·m2。剩磁仅为0.002 A·m2。

图10 占空比和磁矩的关系Fig.10 Relationship between the duty ratio and the magnetic torque

表5 PWM 频率f=50kHz 时的测试数据Tab.5 Test data when the PWM frequencyf=50 kHz
7 结束语
磁力矩器是现代微小卫星姿态控制系统的主要执行机构。本文针对现代微小卫星的需求,采用机电一体化设计理念,以及单绕组加PWM 的驱动控制方式实现了磁力矩器的小型化和集成化;对线圈参数和磁芯参数进行了最优设计,最后设计了一种磁矩测试方法。实际测试结果表明,所研制的微型磁力矩器具有输出磁矩大、输出磁矩线性度好、线性工作范围宽、剩磁小、功耗低、重量轻、体积小、控制方法简便等优点,因此非常适合于微小卫星的姿态控制。本研究可为未来微小卫星姿态控制执行机构的发展提供了新的思路和实现途径。
猜你喜欢
大电机技术(2022年4期)2022-08-30
现代电子技术(2022年6期)2022-03-25
防爆电机(2022年1期)2022-02-16
新视线·建筑与电力(2021年2期)2021-09-10
直升机技术(2020年2期)2020-06-16
山东青年(2016年12期)2017-03-02
中小学实验与装备(2014年2期)2014-09-21
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
学苑创造·A版(2009年9期)2009-11-12
网络与信息(2009年3期)2009-05-21