我国首次自主火星探测任务中环绕器的研制与实践
2020-11-24 03:34张玉花王献忠褚英志朱新波牛俊坡
上海航天 2020年5期
张玉花,王献忠,褚英志,朱新波,王 伟,3,牛俊坡,3
(1.上海航天技术研究院,上海 201109;2.上海卫星工程研究所,上海 201109;3.上海深空探测技术重点实验室,上海 201109)
0 引言
自1960 年以来,人类深空探测活动的对象囊括了太阳系所有类型的天体。探测形式也从前期以飞越为主,到绕、落、巡和采样回等多样化发展。其中,环绕探测作为着陆、巡视、采样回探测的基础,在深空探测中起到举足轻重的作用。火星作为距离地球最近的类地行星,在国际上一直是探测的热点。
1960 年,美国和苏联在冷战背景下同时起步,在火星探测领域展开了激烈竞争。截至2020 年9 月,人类共开展了47 次火星探测任务,如图1 所示。如按时间来划分,火星探测历程大致可分为3个阶段:第1 阶段(1960—1975 年),共实施了25 次任务,主要特征是美、苏把火星探测作为竞技场,掀起了火星探测的一轮高潮;第2 阶段(1976—1990年),随着美、苏竞争战略重点转移,火星探测进入低潮期,仅实施2 次任务;第3 阶段(20 世纪90 年代至今),共实施20 次任务,以发展新技术和获得科学上发现为主要驱动力[1-7],其中,涉及环绕探测的任务有27 次,约占57%,10 次的探测形式是通过一次发射完成环绕、着陆任务。
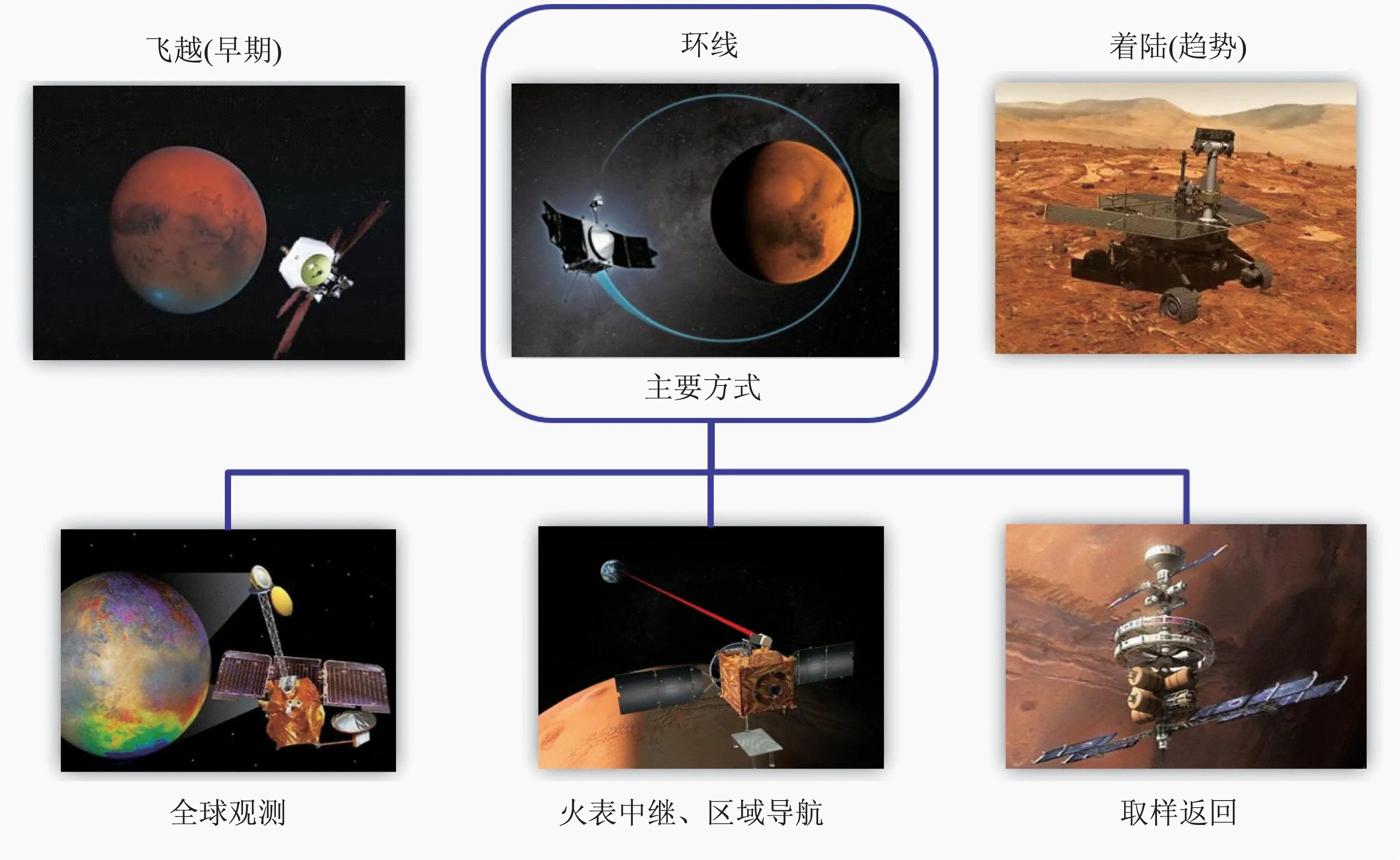
图1 火星探测主要方式Fig.1 Main methods for Mars exploration
2020 年作为最新的火星发射窗口期,全球有三大火星探测任务:中国“天问一号”探测任务、美国“毅力号”火星车2020 探测任务(Mars2020)、阿联酋“希望号”火星探测任务[8-12],概念图如图2 所示。

图2 3 个国家的任务概念图Fig.2 Mars exploration of three countries
美国“毅力号”火星车(Mars2020)于2020 年7 月30 日发射,用于进一步寻找火星生命迹象,测试从火星大气层中产生氧气的方法,探测火星地质、环境条件,存储火星样本,为未来样本返回任务做准备[13-16]。阿联酋“希望号”火星任务是阿联酋首个行星际、火星探测任务,由阿联酋航天局联合美国航空航天局(NASA)和日本JAXA 等全球航天机构合作的火星轨道器于2020 年7 月20 日发射,全面探测火星大气,研究火星气候变化、低空天气变化、沙尘暴预报等,绘制火星详细地貌和大气变化情况[17-18]。中国“天问一号”探测任务是中国首次独立自主开展的行星探测,于2020 年7 月23 日由长征五号遥四运载火箭发射升空,目前正在奔火途中,将一次性完成“绕、着、巡”三项工作,探测起点高、技术难度大[19-21]。
本文主要通过对我国首次自主火星探测器“天问一号”的环绕器在研制和实践过程中的技术难点及关键技术进行归纳总结,梳理未来深空环绕探测的技术发展路线,针对后期的任务需求提出构建深空通用化环绕平台设想,为我国深空探测的继承性发展提供参考。
1 环绕器方案概述
火星探测器系统整体构型如图3 所示,其由火星环绕器和着陆巡视器组成。通过环绕探测,实现火星全球性和综合性的探测;通过巡视探测,实现火星表面重点地区高精度、高分辨的精细巡视勘查。

图3 火星探测器整体构型示意图Fig.3 Overall configuration of Mars probe
火星环绕器是火星探测器的重要组成部分,承担了携带着陆巡视器,完成地火转移段轨道修正、火星制动捕获、环火段轨道调整等任务,进入火星停泊轨道后,进行落区的预探测和进入点位置调整,择机与着陆巡视器分离,提供着陆巡视器进入、下降、着陆(Entry,Descent and Landing,EDL)过程及火星表面探测过程的中继支持服务。环绕器进行轨道机动进入遥感轨道,通过携带的中分辨率相机、次表层探测雷达等有效载荷开展科学探测。为完成上述探测任务,环绕器主要具备8 大功能:结构支撑与连接功能、姿态轨道测量与控制功能、测控数传功能、信息管理功能、能源管理功能、热管理功能、自主管理功能、科学与工程探测功能。
环绕器系统由结构、太阳翼、热控、制导/导航与控制(Guidance,Navigation and Control,GNC)、推进、综合电子、测控数传、定向天线、总体电路、电源、工程测量和有效载荷12 个分系统组成。环绕器构型设计采用“外部六面柱体+中心承力锥筒”的构型,如图4 所示。
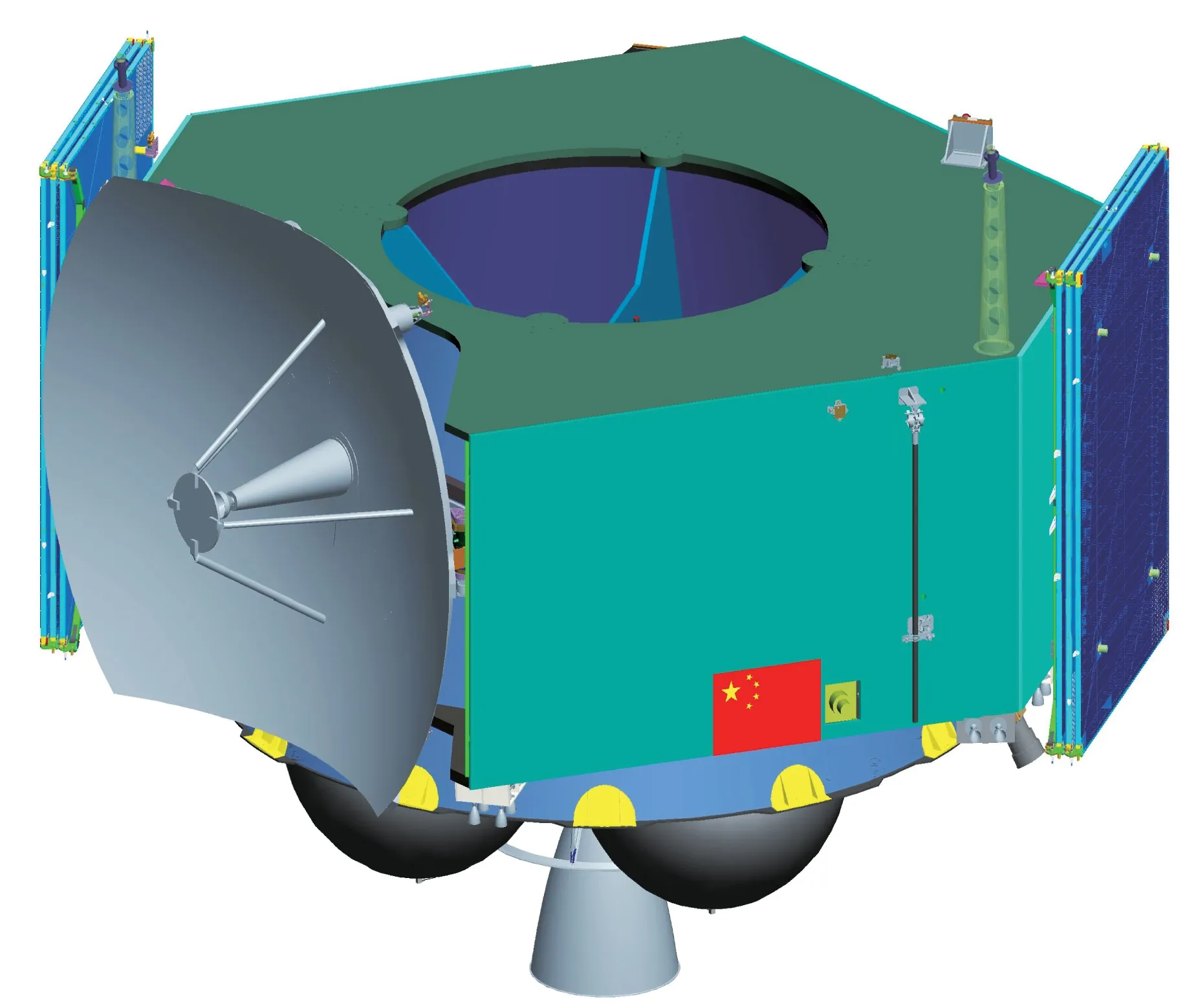
图4 环绕器收拢状态构型图Fig.4 Collapsed state configuration of Mars orbiter
火星环绕器的飞行过程如图5 所示,主要包括:发射段、地火转移段、制动捕获段、轨道调整与中继通信段以及科学任务段。根据环绕器在全过程飞行中的状态可以将环绕器的工作模式划分为发射段模式、巡航飞行模式、中途修正模式、制动捕获模式、轨道调整模式、火星停泊模式、器器分离模式、中继通信模式、科学探测模式、日凌模式及应急模式。
2 技术难点与挑战
作为我国首次自主火星探测任务,火星环绕器的工程研制面临诸多难点与挑战。
2.1 缺乏一手的火星环境数据
虽然通过载人航天工程、探月工程和其他重大航天工程实施,积累了一定的地外探测器研制经验,但是目前对火星空间环境(引力场、磁场、大气、地形地貌等)的认识仍然不够,环境数据来源于国外探测结果,缺乏一手的火星探测数据,需要深入调研分析火星探测任务全过程环境要素,开展环境适应性设计,确定技术方案,进行必要的试验验证,确保产品选用和系统继承的正确性,满足任务最大包络要求,确保方案可靠、指标裕度充足、对任务要求全覆盖。

图5 火星探测器飞行过程示意图Fig.5 Flight process of Mars probe
2.2 器地距离遥远
器地距离远带来空间损耗高、通信时延大的问题,主要给测控数传和GNC 方案设计提出了更高要求。器上需要配置大功率行放和大口径天线,提高等效全向辐射功率(Equivalent Isotropically Radiated Power,EIRP)值,补偿远距离带来的链路损耗,满足器上数据对地传输需求;器上需要配置高灵敏度深空应答机,解决最远4 亿km 的上行遥控指令接收问题。此外,由于距离远,导致深空探测器无法像地球卫星一样实现测控天线的全空间对地覆盖,GNC 分系统必须和测控系统配合,实现各种正常、异常模式下的对地链路建立与可靠通信。
2.3 器日距离变化大
器日距离变化大带来太阳辐照强度变化范围大的问题,主要对热控和电源系统设计产生较大影响。整个探测任务期间,探测器和太阳的距离在1.0~1.5 AU 之间变化,太阳辐照强度相应在约1 367~589 W/m2之间变化。导致近地空间时,太阳电池阵功率能力高,近火空间时大幅降低,需要考虑电源系统优化设计和热管理等问题。此外,太阳辐照强度的大范围变化,也需要考虑整器的热控制与管理方案优化设计。
2.4 通信链路中断时间长
通信链路中断时间长将带来长期无地面测控支持的在轨自主运行问题,主要对环绕器自主管理与控制技术水平提出了新的挑战。由于地球自转和天体遮挡等原因,导致器地通信链路中断时间较长。日凌期间,环绕器需要自主在轨运行数十天。环绕器需要解决能源管理、姿态管理和进出日凌的通信管理等几个方面的问题,确保环绕器无人照料期间的安全。
2.5 制动捕获机会唯一
由于火星捕获窗口的唯一性,捕获的成败决定了火星探测任务的成败。但是,由于捕获时器地距离远,地面无线电测定轨精度低,并且无法实时监控制动过程,全靠器上自主执行捕获策略。同时,受限于运载发射能力,探测器携带推进剂有限,必须精确判断并控制开关机时机和时间。由此可见,实现火星制动捕获,形成环绕轨道技术难度很大。需要制定自主管理策略,优化制动捕获控制参数,开展充分的仿真与半物理试验验证。此外,制动过程中,器上需要具备自主二次点火能力,应对器上突发故障,确保火星捕获安全可靠。
2.6 器器分离升轨难度高
器器分离阶段,环绕器需要在缺乏地面测控支持的情况下,自主完成三次大幅度姿态调整和两次轨道机动,过程十分复杂。为了建立着陆巡视器要求的高精度进入条件,环绕器需要降轨至撞击轨道,若升轨异常,则存在坠毁在火星大气层的风险。此外,在着陆巡视器分离后,环绕器需要建立器器-器地实时转发的中继通信链路,获取着陆巡视器进入火星过程的工程数据,这对环绕器控制能力、通信能力都提出了很高的要求。
3 火星环绕器研制情况
3.1 研制历程
2016 年,我国火星探测任务正式批复立项,基于前期工作同步完成关键技术攻关工作,并转入初样研制阶段。
在初样阶段,火星环绕器根据识别出的火星在轨低温条件,完成了舱外单机/组件级的低温储存、冷热交变试验;针对3 000 N 发动机点火、器器分离冲击,完成了太阳翼、定向天线展开状态下的冲击分析及薄弱组件的静力验证试验;针对长期在轨存储环境,完成了蓄电池、推进系统的长期存储试验。各项试验结果表明,环绕器方案设计满足各项环境约束,并有一定的裕度。此外,环绕器还完成了测控对接试验、与运载火箭的器箭分离试验、与应用系统的对接试验、与发射场的合练等,验证了与四大系统之间的接口匹配性和工作协调性。
2018 年,火星环绕器按照研制技术流程完成初样工作,转入正样研制阶段。在正样研制过程中,各分系统完成了产品研制和试验、复查及设计复核;整器完成了总装、电性能综合测试、电磁兼容性(Electromagnetic Compatibility,EMC)试验、力学试验、热试验;完成了与地面测控、地面应用、运载火箭系统的对接试验,完成了与测控、地面应用系统的全任务1∶1 联试,进一步验证发射状态下的匹配性。2020 年7 月23 日在文昌航天发射场发射成功,目前在轨运行状态良好。
3.2 关键技术突破情况
结合任务特点和工程实际,环绕器重点突破了6 项关键技术。
3.2.1 大承载轻量化复杂构型技术
火星探测器总质量约为5 000 kg,环绕器结构设计面临结构质量有限、本体包络尺寸大、运载条件苛刻、承载单机设备多且复杂等多重约束,需通过点式连接承载着陆巡视器载荷,具备携带近50%探测器质量推进剂载荷的能力,同时要兼顾大口径可展开驱动固面天线的布局安装需求。
为满足着陆巡视器、太阳翼、定向天线、高分相机、推进贮箱等大部件的安装与承载,结构构型采取中心承力筒锥筒+六面柱体的构型(如图6 所示),简化了传力路径;通过大容积并联式贮箱布局,有效降低了整器质心和与着陆巡视器界面响应;通过非承力部位减重化设计,实现环绕器结构构型的轻量化。静力试验结果表明,环绕器结构承载达到设计载荷的130%左右,结构质量占比约6%;振动试验结果表明,探测器横向基频、纵向基频均满足运载要求,且器器安装面的响应满足设计要求。

图6 结构关键部件设计Fig.6 Design of key components of the structure
3.2.2 火星捕获与器器分离自主控制技术
火星环绕器工作模式复杂多样,根据不同阶段任务需求,火星环绕器需在对地、对日、对火等模式间进行切换;火星捕获机会仅一次,捕获时器地距离单向通信延时超过10 min,为确保任务成功,火星环绕器捕获制动需具备自主控制能力;器器分离需连续多次姿态机动和自主变轨,着陆器分离精度对姿态、位置测量及控制精度要求非常高,环绕器需及时自主升轨避免撞击火星。
为了精确控制发动机变轨时点火时长,制定时间与加速度双关机策略,选取合理的最短、最长点火时长,确保火星捕获安全和器器分离阶段精确的速度增量控制。由于捕获和器器分离期间地面无法实时控制,为了应对器上突发故障,制定了自主故障诊断与策略切换,捕获段具备在轨二次点火能力,可基于多数据融合的在线诊断及快速重构,自主规划新的轨控参数,切换至备份推力器变轨完成变轨任务。此外,为了满足调姿变轨期间的对地通信、能源获取、载荷避光等需求,设计了多指向约束的姿态机动路径自主规划方法,在复杂的机动过程中满足不同的约束条件。
3.2.3 火星光学自主导航技术
在捕获制动阶段,器地距离遥远,地面导航精度与实时性不足。环绕器需要结合器上自主导航手段,快速提供高精度轨道数据。环绕器配置了光学导航敏感器,可实现器上实时轨道测量。光学自主导航在捕获段采用光学导航敏感器,环火后采用红外导航敏感器。光学导航敏感器的光学系统在重量约束条件下进行了优化设计,采用恒星姿态识别+硬脉冲校时确保时空对准,采用自适应边缘提取及伪边缘剔除和精细亚像素定位技术,实现亚像素级图像处理。近火捕获前光学导航敏感器在距离火星100 万km 时,位置误差与地面无线电测量精度相当。
红外导航敏感器采用可见光谱段和长波红外谱段复合探测方式,如图7 所示,通过对火星凝视成像,检测火星图像边缘确定其中心相对探测器的视线角度和高度,辅助GNC 分系统完成轨道确定,红外导航敏感器采用可见光+红外探测机制,通过基于几何方法的火星中心像面修正技术和基于亚像素细分的椭圆精确拟合技术,实现高精度的位置估计。
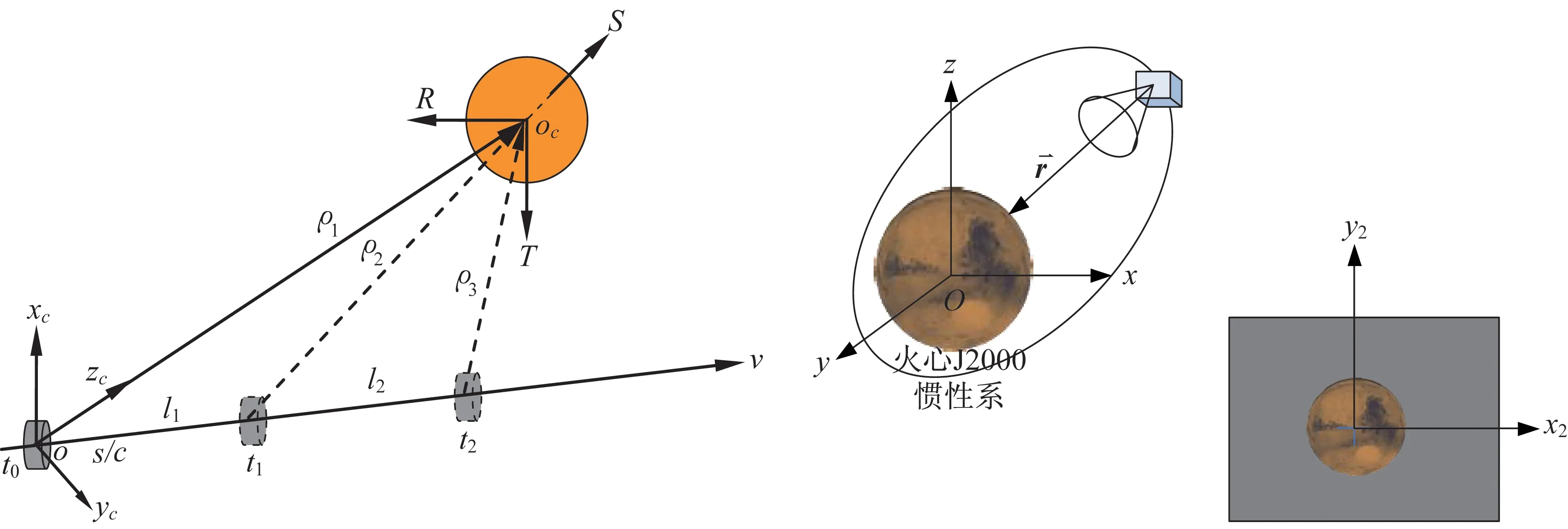
图7 捕获段光学与环绕段红外自主导航方法示意图Fig.7 Schematic diagram of optical/infrared autonomous navigation method in capture/surround phase
3.2.4 深空长期在轨自主管理技术
火星环绕器在轨飞行时间长,飞行过程中存在日凌/凌日天文现象,而且飞行距离遥远,器地通信时延很大,制动捕获和器器分离等关键段无法实现实时监控,需要火星环绕器在不同的任务阶段实现自身自主管理,主要包括平台常规自主管理和针对特定任务及故障预案自主管理等两个方面。平台常规自主管理,涵盖自主实现平台的正常运转,完成自主热控制、自主能源控制、自主姿态测量与确定、自主姿态机动、自主轨道保持,为探测器上的单机营造合适的温度环境,为科学载荷工作提供必要的支撑。针对特定任务及故障预案的自主管理,自主实现既定的科学探测任务,完成科学数据获取、预处理与存储,确保科学探测数据的连续性,在器地链路恢复时将日凌期间的探测数据回传地球,最大限度地确保科学探测成果的完整性。
通过研制高度集成的小型化综合电子系统,实现器务管理、遥测遥控、热控管理、配电管理、推进控制、机构驱动、数据存储功能的一体化,为综合信息自主管理奠定了硬件基础。通过设计多系统多模式器上信息综合处理方法,保证一级故障任务正常执行,二级故障整器安全。通过关键技术攻关,可实现环绕器在轨无人监控状态下自主运行大于30 天的能力。
3.2.5 深空高速测控数传一体技术
深空探测器与地球取得联系的唯一手段是无线通信技术。由于深空探测的距离遥远等特点,使得通信信号强度损耗大,接收信噪比低,通信时延巨大,数据传输速率受限,加上通信终端相对速度大,多普勒及其变化率大,导致信号捕获和跟踪难度大。目前,国外深空探测器普遍采用测控数传一体设计方案以减少设计的重量、功耗以及简化地面接收设备等。火星环绕器配备了多副天线,通过天线多波束赋形技术实现不同距离与地球的可靠通信。为了实现高速测控数传,环绕器攻克了低信噪比载波捕获、多码率遥控上行自适应接收、单天线多波束范围赋形等技术,测控数传分系统具备极低信噪比信号捕获接收、多码率遥控上行自适应接收、高精度定轨等能力。
攻关研制了测控数传一体化的数字化深空应答机,实现上行载波跟踪灵敏度指标。通过窄带滤波、多通道快速傅里叶变换(Fast Fourier Transform,FFT)并行计算等方法,实现多档码率自适应接收,接收机动态范围大于90 dB,满足大范围空间衰减变化和姿态、天线指向多变的需求。实现测控天线收发一体化,同一副天线实现双波束赋形,近地弧段宽波束全向覆盖,降低了对姿态的要求;远地弧段窄波束配合姿态指向,满足应急通信需求。
3.2.6 多码率自适应中继通信技术
环绕器器间通信分系统采用UHF 频段和X 频段双通道进行中继通信,与着陆巡视器配合完成着陆巡视器遥控指令的前向传输和科学数据及遥测数据的返向传输。
器间通信分系统担负着火星探测器两器(环绕器和着陆巡视器)间信息通信,关系到着陆巡视器探测任务的成败;根据火星中继通信实际情况,在面临新环境——火星环境的情况下,对环绕器器间通信分系统提出了高动态范围、高灵敏度、高多普勒测量精度、轻量化小型化设计等高要求,实现UHF 多普勒测量精度要求,具备高效率载波捕获与同步跟踪能力。
4 发展与展望
4.1 技术路线
深空探测能力是一个国家综合实力的体现,继我国首次自主火星探测之后,还将实施小行星探测、火星取样返回、木星系及行星际穿越探测任务,环绕探测技术将在深空通信、高精度自主导航、智能化自主管理与高效能动力4 个方面进一步提升,为后续深空探测器的研制奠定基础。具体技术路线如图8 所示。
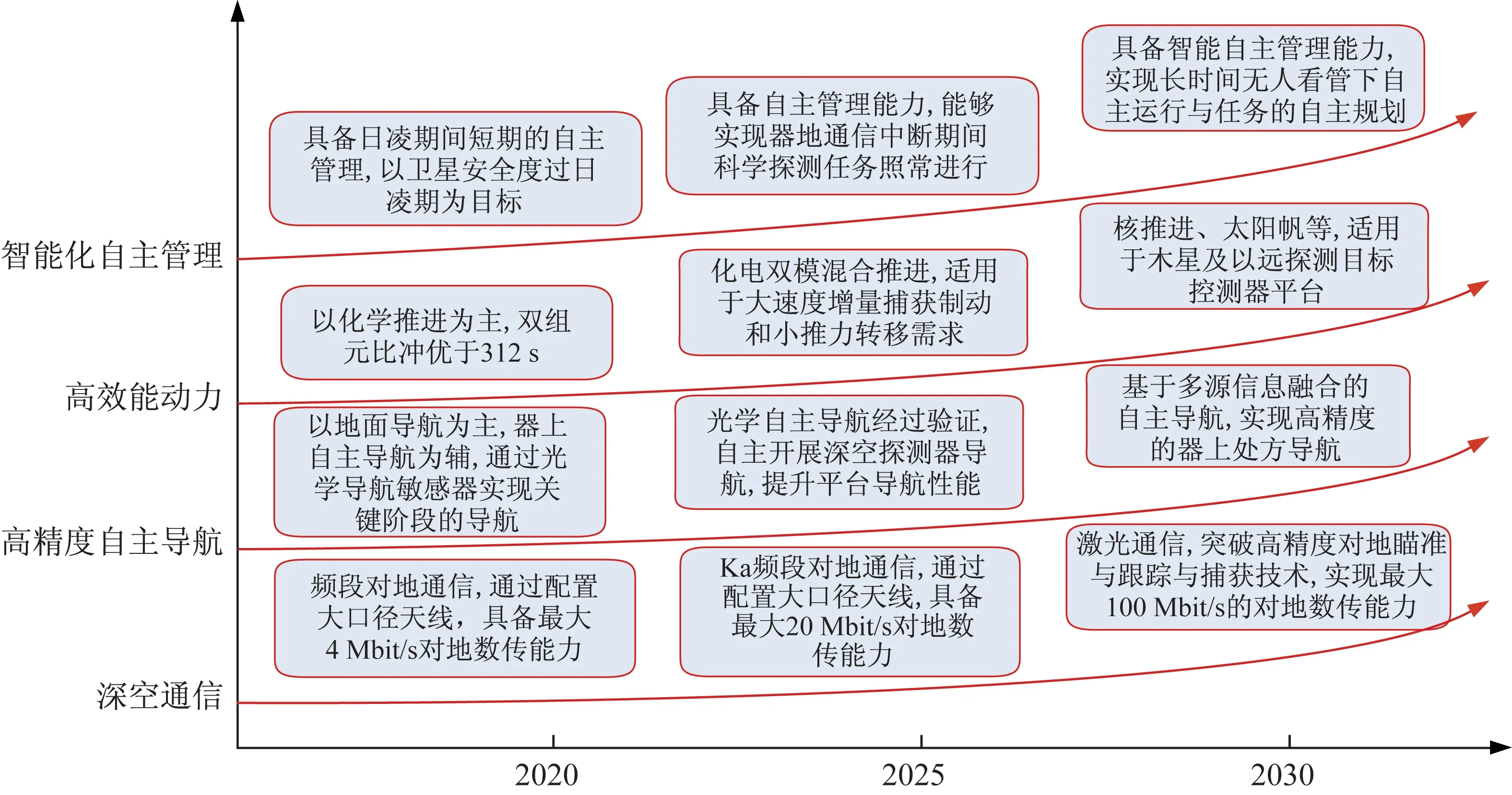
图8 技术发展路线图Fig.8 Technology development roadmap
4.2 深空通用环绕平台
我国首次自主火星探测,在研制过程中突破了多项关键技术,其中大部分是深空探测任务的共性问题,如远距离通信、自主管理、自主导航、制动捕获等。我们充分利用已有的技术基础,立足于现有的火星环绕平台,提出深空通用环绕平台构想,为我国后续深空探测发展奠定基础。
4.2.1 平台模块化
以火星环绕器研制过程中突破的核心关键技术为支点,采用模块化思想,形成深空通用环绕平台模块库,如图9 所示。在充分继承已有技术的基础上,模块库还可以根据后续任务规划以及技术发展等动态进行模块增容以及已有模块的更新升级,具备针对未来探测任务,通过库内模块的选配组合从而快速实现任务需求的能力。

图9 深空通用环绕平台模块库示意图Fig.9 Schematic diagram of general orbiter platform module for deep space
4.2.2 系列化平台应用
以首次自主火星探测任务为契机,大力发展深空探测通用环绕器平台,可应用于火星取样返回任务、金星环绕与漂浮探测任务、小行星伴飞附着及取样返回任务、木星及其卫星探测任务和太阳极轨探测任务等多个任务的系列化环绕器。面向后续深空探测任务,采用通用环绕平台的探测器构型设想如图10~图12 所示。
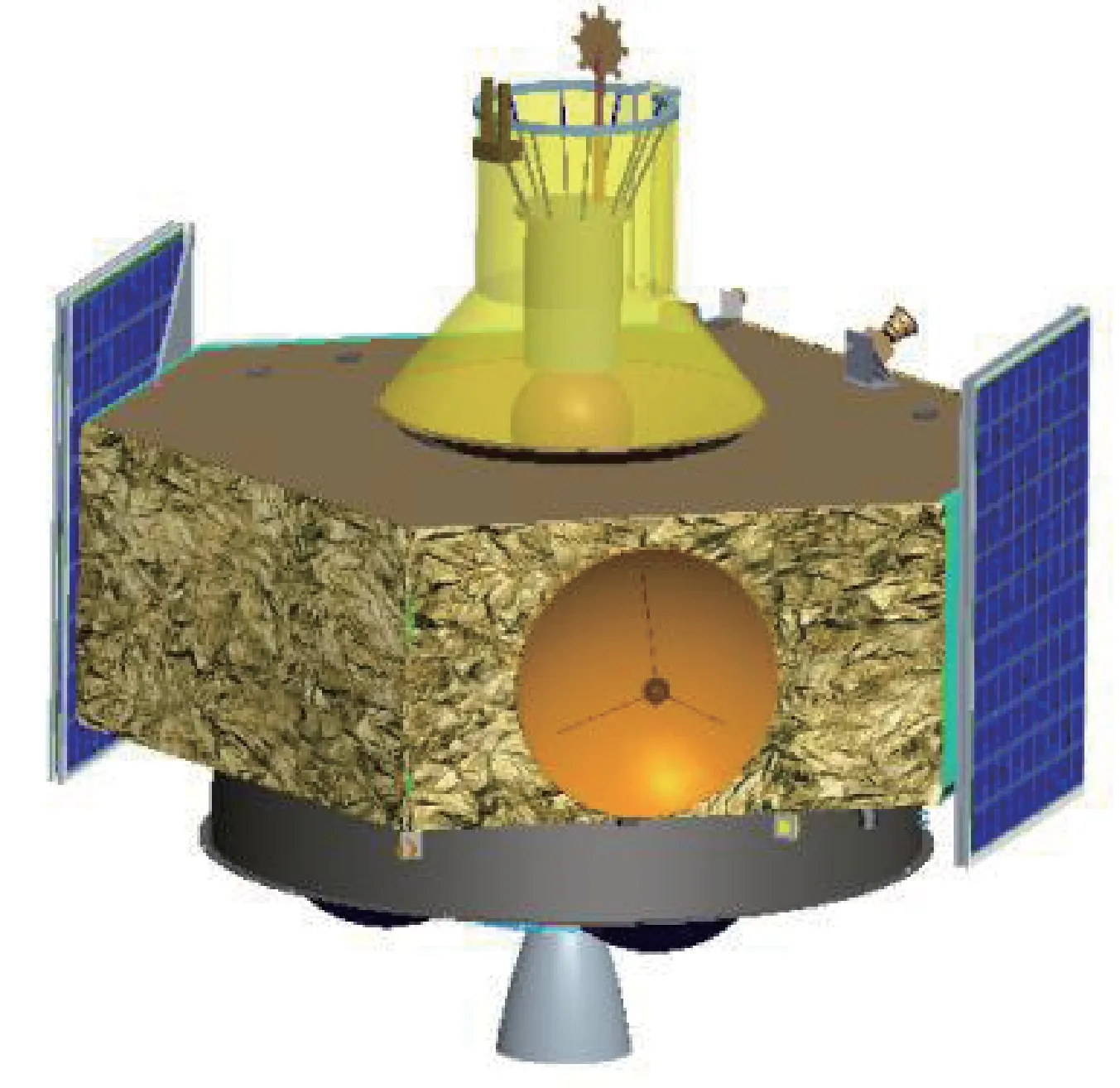
图10 火星取样返回环绕器示意图Fig.10 Schematic diagram of Mars sampling return orbiter

图11 金星探测器示意图Fig.11 Schematic diagram of Venus probe
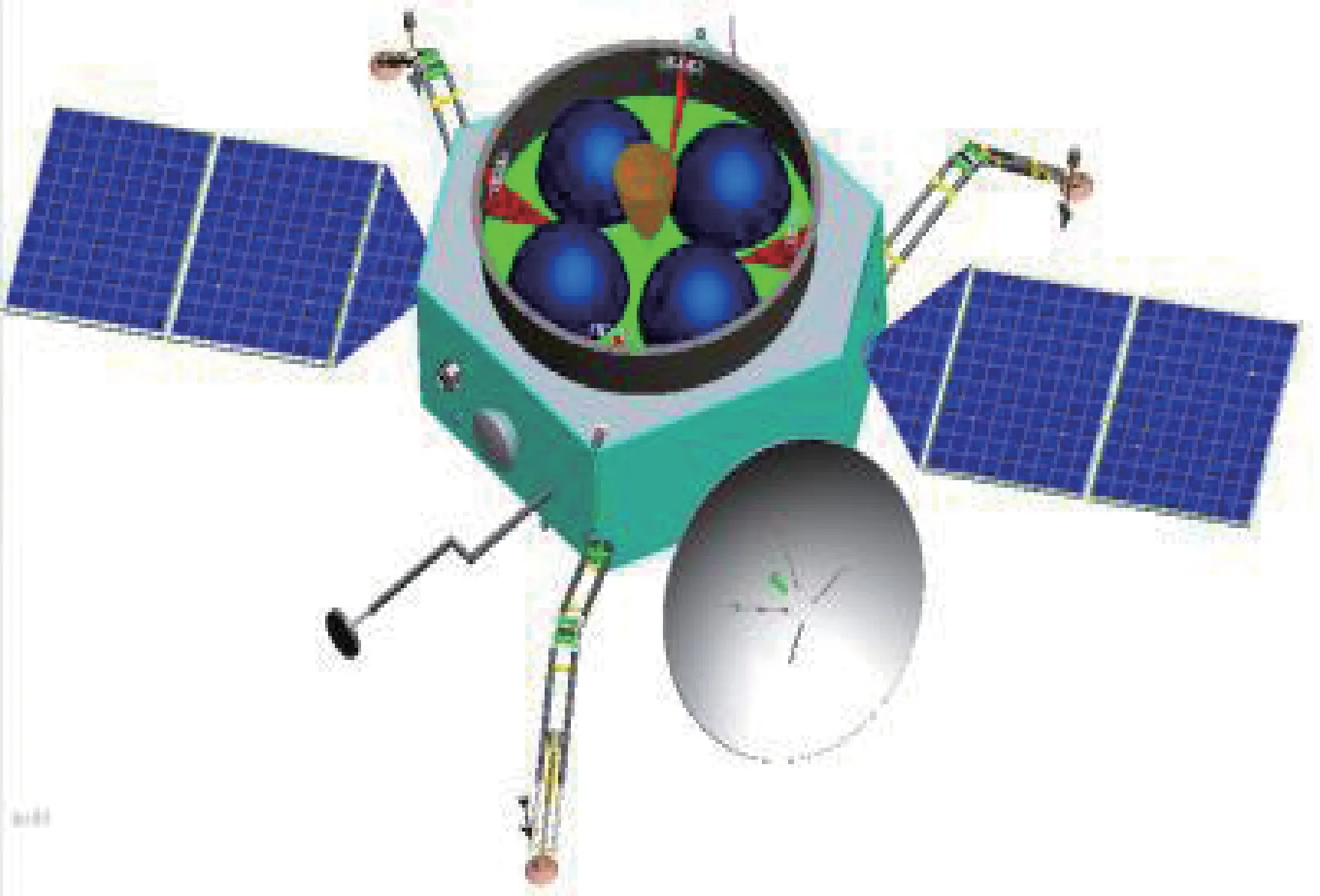
图12 小行星探测器示意图Fig.12 Schematic diagram of asteroid probe
5 结束语
火星探测器的成功发射,标志着我国行星探测工程全面拉开序幕,该任务将在世界上首次探索火星就一举实现“绕、着、巡”3 个目标,使我国深空探测能力和水平进入世界航天第一梯队,实现在深空探测领域的技术跨越。环绕器研制过程中攻关的大承载轻量化复杂构型、火星捕获与器器分离自主控制、火星光学自主导航、长期在轨自主管理、深空远距离测控通信等关键技术,将大大推动我国深空探测活动的持续发展。
猜你喜欢
振动与冲击(2022年19期)2022-10-17
航天标准化(2021年3期)2021-12-25
海外文摘(2021年7期)2021-08-31
学苑创造·A版(2020年10期)2020-11-06
大科技·百科新说(2020年10期)2020-03-01
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
少年科学(2006年2期)2006-02-20