
基于时空融合的Landsat反射率数据时序重建与分类质量评价
2020-11-19 02:28李大成陈金勇
太原理工大学学报 2020年6期
李 瑄,李大成,2,陈金勇,孙 康
(1.太原理工大学 矿业工程学院,太原 030024;2.高分辨率对地观测系统山西数据与应用中心,山西 晋中 030600;3.中国电子科技集团第五十四研究所,石家庄 050081)
遥感影像土地覆盖分类具有覆盖范围广、分类速度快的优点,在准确检测开发土地利用情况方面应用非常广泛[1-3]。由于存在“同一物体具有不同光谱,而不同物体具有相同光谱”的现象,当使用单时相影像来提取土地利用情况时,信息提取的准确性受到严重影响。由于受卫星重访周期和天气的影响,难以获得足够多的高质量的时间序列影像来进行土地覆盖分类。在遥感数据源方面,连续的高分辨率遥感影像数据对准确记录地物特征意义重大。因此用于融合不同时空分辨率遥感数据,以获取连续高分辨率数据的时空融合模型得到了广泛应用。
在变换模型的融合方法中,主要是小波变换,即对影像进行小波分解,然后对分解后的各层进行融合处理,通过小波变换来实现影像的融合[4]。其中MALENOVSKY et al[5]首先通过小波变换的方法,将MODIS和TM影像数据进行了融合。ACERBI-JUNIOR et al[6]运用三层分解方法,为最小失真情况下的原图像分辨率的提升构建了概念框架。在重构的时空融合模型中,最为流行的是由GAO et al[7]提出的STARFM(spatial and temporal adaptive reflence fusion model,STARFM)算法,并且在后续得到广泛的研究与应用;ZHU et al[8]提出的ESTARFM(enhanced spatial and temporal adaptive reflence fusion model,ESTARFM)算法改进了STARFM算法,逐渐成为使用最为广泛的时空融合算法。
在学习模型的融合方法中,HUANG et al[9]利用稀疏表达与字典学习提出了基于稀疏表达的时空融合模型,用非线性的方式得到了包含高低分辨率空间细节的字典对,使用字典对重建预测时刻的高分辨率影像。
在时空融合技术的应用方面,JIA et al[10]通过融合生成高分辨率NDVI数据,提取高分辨率时间序列NDVI数据中的物候特征,与Landsat数据的光谱数据集成,实现了分类精度的提升;DENG et al[11]使用ESTARFM时空融合模型融合Landsat和MODIS数据并获得时间序列高分辨率影像,使用基于对象的分类方法提取土地利用信息,得到了较好的分类精度;CHEN et al[12]通过融合MODIS、HJ-1A以及DEM等多源数据,证明了时间、光谱、角度和地形特征的融合数据比原始遥感数据具有更高的土地利用分类精度。
当前时空融合技术在土地覆盖分类上的应用均为探索性研究,对融合方法与分类方法的协同机制方面缺少相应的应用检验。因此,本文采用典型时空融合模型来生成研究区多时相的Landsat-5 TM反射率数据,在随机森林、最大似然与支持向量机分类器的支持下,对比分析了时空融合方法与分类器的协同分类结果及其精度表现,验证了该协同机制的具体表现,进一步完善了相关研究。
1 研究区概况与数据情况
1.1 研究区概况
基于对地物类型与气候变化的考虑,本文选择了辽宁省朝阳市西部地区作为实验研究区(如图1所示)。该研究区主要覆盖朝阳市辖区与朝阳县,地理范围为东经118°50′—121°17′,北纬40°25′—42°22′,总面积共5 625 km2,属北温带大陆性季风气候,地物类型包括建筑物、农田、林地、水体、裸地。
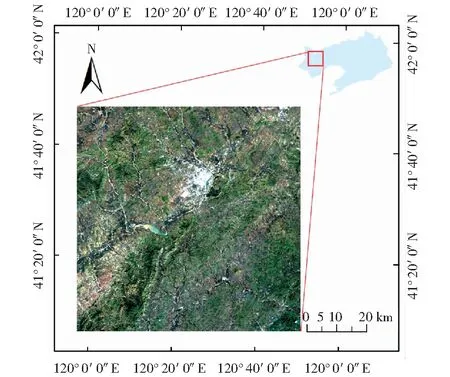
图1 研究区遥感影像Fig.1 Remote sensing image of studied area
1.2 实验数据
本文筛选了2008-03-13-2009-02-02间的无云Landsat和MODIS数据为最终的实验数据,Landsat数据需进行正射校正、辐射定标以及大气校正等处理,MODIS数据需进行重投影及重采样处理。所采用的具体数据信息如表1所示。为验证分类结果的精度并进行对比分析,收集了研究区2008年的土地利用调查资料及其处理成果作为参考分类数据源,用于对分类结果的精度评定。

表1 遥感数据信息Table 1 Remote sensing data information
2 实验方法
采用多种时空融合模型对研究区多时相30 m分辨率影像数据进行融合重建以及质量评价。依据重建数据进行土地利用分类,并研究时间特征信息对分类精度变化的影响。实验流程如图2所示。

图2 实验流程Fig.2 Experimental procedure
2.1 基于时空融合的时序影像生成
时空融合是一种在现有高低分辨率影像数据对的基础上,运用特定的算法,实现对预测时期高分辨率影像融合重建的方法。由于时空融合模型在不同区域的适用程度不同,融合重建结果质量会有一定差异,因此本文选用STARFM、ESTARFM与半物理3种时空融合模型,分别对研究区时序数据进行重建和质量评价,以探索重建质量与时序数据分类结果精度的关系。
2.1.1STARFM时空融合模型
STARFM时空融合模型是由GAO et al[7]提出的一种通过基础时相的高低分辨率影像和预测时期的低分辨率影像,实现预测时期的高分辨率影像融合重建的算法。该模型是在原始数据的基础上,设定一个滑动窗口,搜索窗口内与中心像元的光谱特征相似的像元,进而计算临近像元的距离权重和转换系数,实现对预测时相高分辨率影像的重建。其计算公式为:
(1)

2.1.2ESTARFM时空融合模型
ESTARFM时空融合模型是由ZHU et al[8]提出的一种基于双数据对的时空融合算法,具有相对较高的融合质量,应用极为广泛。首先通过确定滑动窗口的大小,在两个时相影像数据对中遍历搜索与中心像元光谱相似的像元;然后,利用两个时相高低分辨率影像以及预测时相的低分辨率影像计算相似像元的时间权重。最后,根据时间权重与相似像元的各类权重计算中心像元,实现对预测时相影像的重建。其中心像元的重建方法表示为:
Rpre(xw/2,yw/2,Tpre)=T1R1(xw/2,yw/2,T1)+
T2R2(xw/2,yw/2,T2).
(2)
式中:Rpre为预测时相Tpre的高分辨率融合数据;w为滑动窗口的大小;R1与R2分别为两个基础时相的高分辨率数据;T1与T2分别为两个基础时相数据的时间权重。
2.1.3半物理融合模型
与STARFM模型相同,半物理融合模型是一种基于单数据对来实现数据重建的方法。其通过利用反射率参量的几何光学模型,建立起不同尺度影像之间的相互关联,进而准确地捕捉到时相变化引起的影像变化信息。其模型的反演原理如下式:
ρ(λM,ε)=f1(λM)K+f2(λM)K+f3(λM)K.
(3)
式中:ρ(λM,ε)代表影像地表反射率;λM与ε分别是波长与视向量;f1(λM)、f2(λM)、f3(λM)表示光谱通道的模型参数;K表示影像的BRDF模型核。
2.2 时序影像数据的分类
采用随机森林、最大似然与支持向量机分类器分别对时序影像进行土地利用分类,并对分类结果进行精度评价。研究时间特征信息对分类精度变化的影响。
2.2.1随机森林分类器
随机森林(random forest,RF)分类器,是基于决策树分类建立的,能够抑制过拟合,且运行成熟迅速,适用于中分辨率影像分类。
RF分类器在运行过程中,首先读取影像和样本大小、地理投影、波段数等影像信息以及分类器特征信息,并将特征信息转化成为一维向量模式输出;之后合并所有特征信息,生成影像数据集与样本数据集,构建随机森林分类器,确定决策树个数后,对输入影像与样本数据集进行分类;最后输出的数据集写成图像,形成最终的分类结果。
2.2.2最大似然分类器
最大似然分类器(maximum likelihood classification,MLC),是根据最大似然比贝叶斯判决准则法来建立非线性判别函数集获得分类结果的一种方法,属于监督分类。MLC分类器在运行过程中,首先在确定影像的波段和特征数的基础上,根据影像所属区域具体情况,在影像上选取训练样本,并进行先验概率求解;然后,将训练区以外的图像像元逐个逐类代入概率乘法公式后,比较各类地物的归属概率大小,选择最大概率值得出类别;最后根据不同像元的概率统计情况,生成分类结果,填充不同类别颜色构成分类图。
该分类器运行简单,实施方便,其密度分布函数对于分类结果的解释非常清晰,在多光谱影像分类领域应用广泛。
2.2.3支持向量机分类器
支持向量机(support vector machine,SVM)分类器属于监督分类,是一种广义线性分类器。在遥感分类中广泛应用,极为可靠。
SVM分类器在分类之前,首先对影像数据进行数值化处理,并将图像转化为数值信息,之后对分类特征进行选择,并生成特征数据集,最后从数据集中抽取部分样本作为训练集,对模型进行训练。在进行分类后,SVM分类器会对惩罚项和核系数进行优化,进一步提高精度后再输出分类结果。
SVM分类器具有优秀的泛化能力,分类速度快,结果也容易解释。但是对输入数据需要进行相关处理,在分类类别增长的情况下,其所需要的计算成本会随之呈现线性增长趋势。
花生通常是经加工后再被食用,通过加工实现蛋白低致敏或脱敏,也是食物过敏研究的重要方向之一[14]。Beyer K[15]等认为,中国花生过敏人口较少的原因主要是我国常采用水煮和油炸两种方式来加工花生,已有研究认为热加工主要是由于温度的不同对花生蛋白产生影响,除了加工引起的蛋白质结构变化可以直接影响致敏性之外,聚集性和消化吸收性等其它性质的变化也会间接影响致敏性[16]。
2.2.4影像分类处理
根据研究区生态系统、气候情况以及地理地形情况的具体组成情况,参考国际IGBP分类体系标准,本文将研究区地物划分为农田、林地、水体、人工建筑、裸地5类[13]。
样本选取采用屏幕选择的方法结合高分辨率遥感影像目视解译,直接在遥感图上选取样本点,样本点均为9个像元的正方形区域。确定训练样本类型及数量之后,进行样本采集。共选择1 350个训练样本点,总计12 150个像元。对比研究区高精度土地分类图,选择了650个验证样本点。由于篇幅限制,本文仅以裸地和人工建筑为例,展示验证样本点位的大致分布,验证样本点位如图3所示。

图3 分类样本点位分布图Fig.3 Distribution of classified sample points
3 实验结果及分析
3.1 时空融合结果及分析
3.1.1时空融合结果
在融合重建过程中,以2008-07-03的高低空间分辨率数据作为STARFM模型与半物理模型的基础时相数据;以2008-07-03和2008-10-07的高低空间分辨率数据为ESTARFM模型基础时相数据,对2008年度13个时相的数据进行了融合重建,重建结果如图4-6所示。
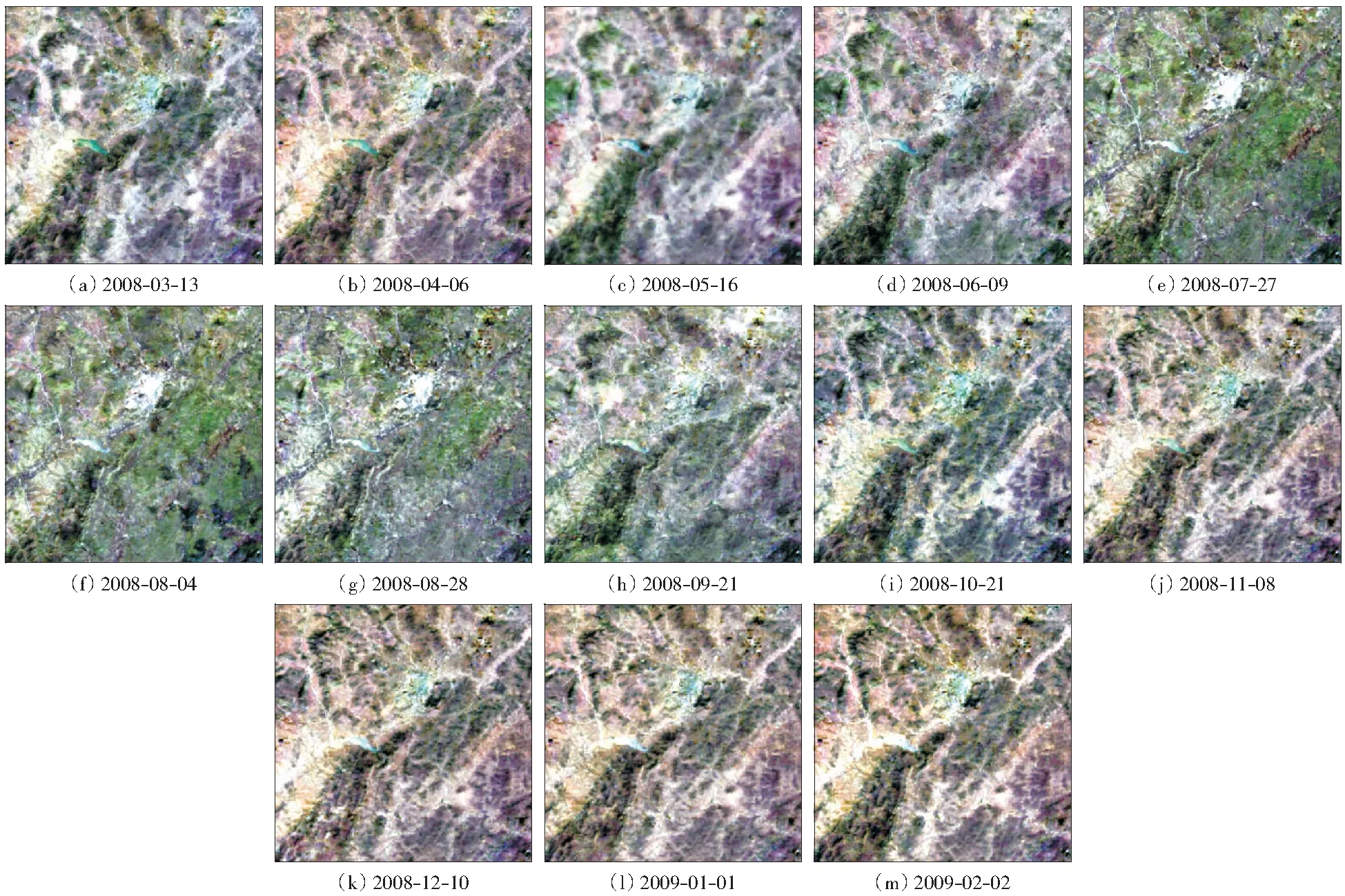
图4 STARFM融合模型重建数据Fig.4 Reconstruction data of STARFM fusion model
3.1.2融合结果分析
时空融合结果质量评价一般分为定性评价与定量评价两种,定性评价主要是通过目视比对与波段分布散点图进行评判[14]。通过目视比对,时空融合重建数据纹理特征明显,色彩失真较少,可以应用于后续实验。由于重建影像数量较多,本文不再对重建影像的波段分布散点图进行全部列举,仅以2008-07-27结果为例展示,具体如图7所示。
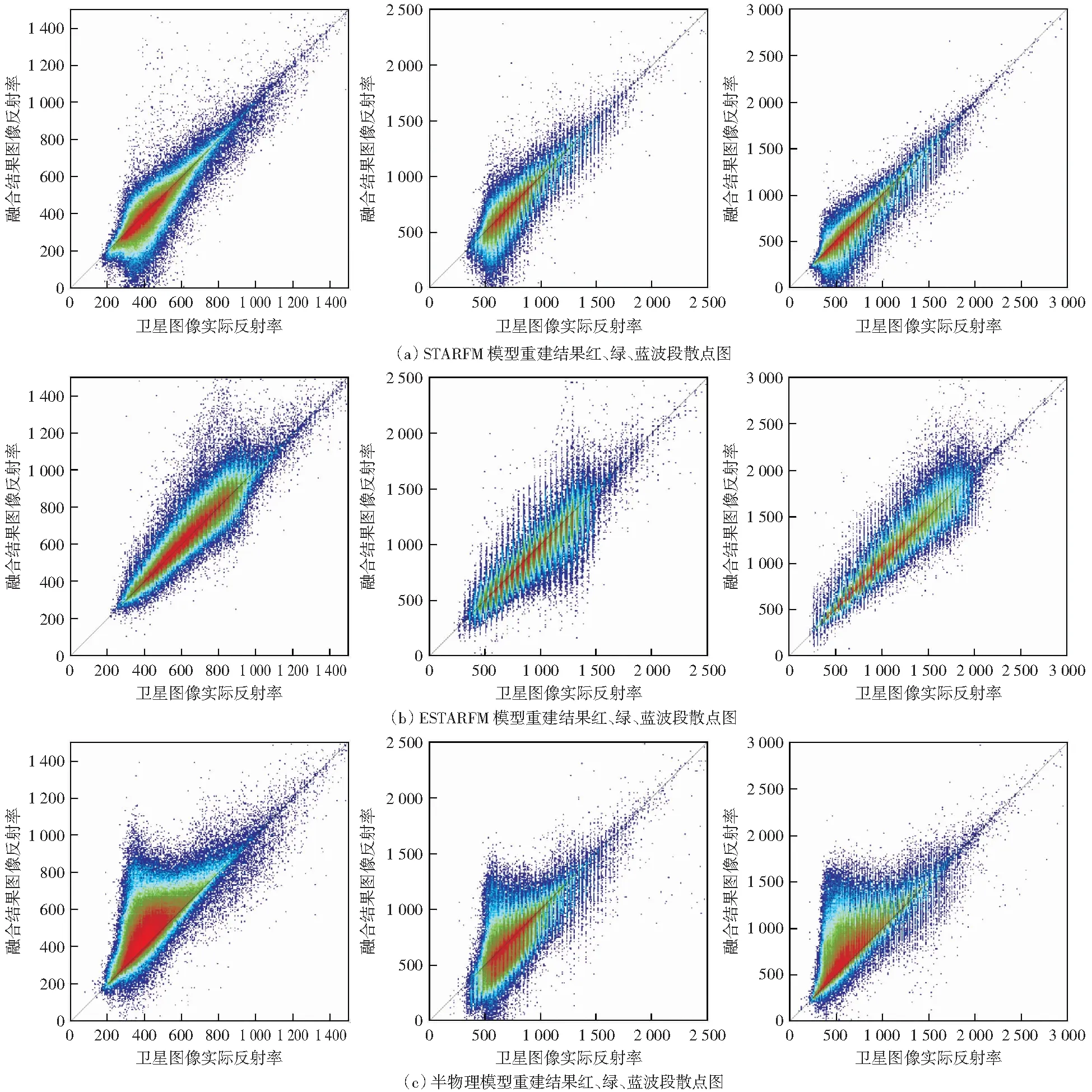
图7 2008-07-27重建结果定性评价散点图Fig.7 Scatter plot of qualitative evaluation of reconstruction results on July 27,2008
定量评价是指从误差与数据结构相似性的角度出发,对融合重建影像进行质量评价。其中较为重要的评价指标有均方根误差RMSE、结构相似性SSIM[15]、峰值信噪比PSNR以及相对整体位数综合误差ERGAS.这些融合指标中,RMSE,ERGAS指标值越小,说明融合结果的光谱误差越小;PSNR值越大,则表明融合结果失真程度越小;SSIM值越大,表明融合结果与真实结果匹配程度越高[16]。本文选择PSNR,RMSE,ERGAS与SSIM作为时空融合结果的定量评价指标。质量评价指数值如表2所示,重建后时序影像评价指标对比如图8所示。

图8 时空融合质量评价指标对比Fig.8 Comparison of spatial and temporal fusion quality evaluation indicators

表2 影像融合质量评价指标Table 2 Evaluation index of image fusion quality

图5 ESTARFM融合模型重建数据Fig.5 Reconstruction data of ESTARFM fusion model
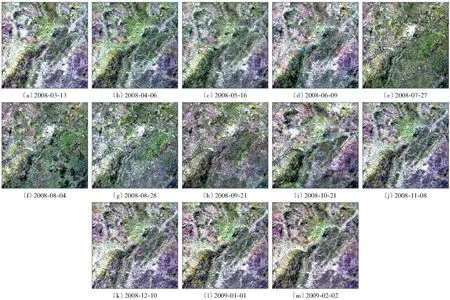
图6 半物理融合模型重建数据Fig.6 Reconstruction data of semi-physical fusion model
通过分析定量评价指标值,3种时空融合方法重建结果RMSE值均为0.01左右,ERGAS值均为20左右,表明融合影像误差值均较低。PSNR值基本都位于20以上,SSIM值基本高于0.85,表明融合重建结果质量较高,与真实数据具有较高相似度。ESTARFM模型在整体影像以及各波段的质量对比中,其表现均优于其他两种模型。这表明了ESTARFM融合模型较其他两种模型具有更好的适应性,也证明了该模型适用于土地覆盖异质性较强区域的特点。
由表2分析可知,当预测时相与融合基础影像时间差距较小时,融合结果在评价指标上表现较优;当时间差距较大时,融合结果的质量会相对降低。由于ESTARFM模型的起始时相为2个,所以其融合结果质量在时间序列中具有较强的稳定性。通过综合评判,ESTARFM模型在该研究区的应用情况最好,STARFM模型次之,半物理模型则应用效果较差。
3.2 分类结果及分析
3.2.1分类结果
重建生成时序影像后,采用不同时空融合模型与分类器之间协同分析的方式进行验证研究与分类精度评定。以分析时间特征信息以及融合重建结果质量对分类精度的影响,分类结果如图9所示。
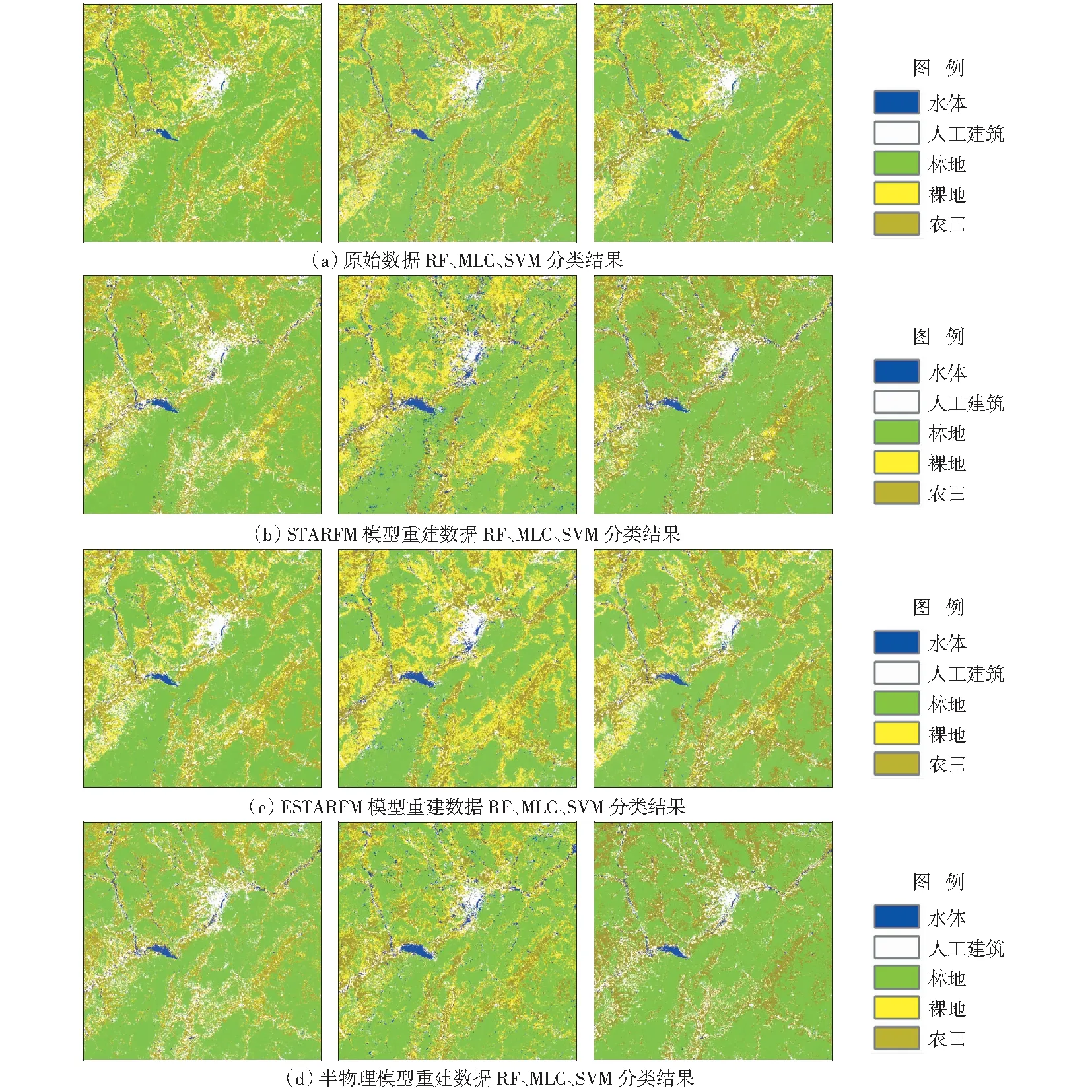
图9 分类结果Fig.9 Classification results
3.2.2分类结果评价
在分类精度评价方面,采用了混淆矩阵的方法,实现对分类结果精度的评价验证。通过选取验证样本构建混淆矩阵,再利用混淆矩阵计算分类结果的Kappa系数与总体分类精度,以这两个指标值衡量分类结果精度。3种分类器对不同重建数据的分类精度指标值如表3所示。

表3 分类结果精度评价指标Table 3 Accuracy evaluation index of classification results
综合分析分类结果的精度评定指标值可得,所有分类结果的Kappa系数基本均在0.9以上,总体分类精度超过了90%,表明分类器均具有良好的精度表现。其中RF分类器分类效果最好,总体分类精度高出SVM分类器2%左右,高出MLC分类器4%左右。Kappa系数也具有相同的变化趋势。
由表3中数据分析可知,在基于时序影像的分类结果中,3种分类器对不同的时序重建结果的分类精度指标与原始数据对比均有所提高,时序影像重建对于不同分类器精度提升都具有积极作用。总体分类精度均有1%左右的提升,Kappa系数也均提升了0.1左右。小于不同分类器的精度差值,表明时间特征的加入对精度的影响小于分类器本身。
分析比对不同时序重建数据的分类精度,3种模型重建结果与原始数据对比,分类精度均有提高。对于不同的分类器提升幅度不一样,ESTARFM模型重建结果分类总体精度均提升了约2%,而STARFM与半物理模型总体精度提升幅度只有1.5%与1%. Kappa系数的变化规律也具有相同的趋势。分类精度提升的大小与融合重建结果质量高低呈正相关,当融合重建结果质量较高时,其对分类精度提升的幅度也较大。
此外,同一地物在不同重建数据下,精度的提升幅度各不相同,以效果最好的ESTARFM模型和RF分类器组合分析,如图10所示。不同分类器在针对ESTARFM模型重建数据进行分类时,各类地物精度较原始数据提升幅度最高,其次为STARFM模型重建数据和半物理模型重建数据。各地物类型的精度提升幅度与整体影像有相同的变化规律,其精度提升幅度与重建数据质量呈正相关。
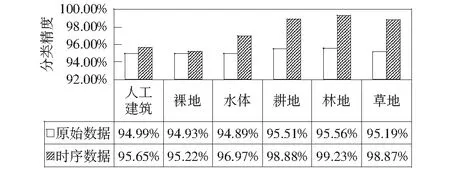
图10 各类地物分类总体精度对比Fig.10 Comparison of overall accuracy of various features classification
在基于时序影像的分类结果中,不同地物分类精度提升的幅度也有很大差别,其中提升幅度最大的是水体,由于研究区特有的气候状况,水体面积在不同季节变化较大。本文以效果最好的ESTARFM模型和RF分类器组合分析,各类地物不同数据的分类结果如图11所示。在原始数据分类结果中,由于水体在该时相有干涸现象,其面积较小,水体中部分区域被误分为人工建筑,而基于时序数据的分类结果中,水体面积相对较大,与实际地物表现情况较为接近。

图11 分类结果细节对比Fig.11 Detail comparison of classification results
除水体外,裸地、林地和农田的精度变化幅度也相对较大,由于季节因素的影响,植被的不同物候特征引起了植被类地物面积的变化。随时间因素变化较小的人工建筑面积变化幅度则最小。在基于时序影像的分类结果中人工建筑面积基本没有发生太大的改变。这说明在基于时序影像的分类中,分类精度的提升主要集中于水体类、植被类等物候特征变化明显,受时间影响较大的地物方面。
4 结论
本文通过时空融合模型,重建生成研究区年度Landsat时间序列数据,采用多种分类器对时序影像进行分类,研究了时序影像重建对不同分类器的精度影响,得到如下结论:
1) 与STARFM和半物理模型相比, ESTARFM模型表现出了较好的应用效果。基于双数据对的时空融合模型比基于单数据对的模型具有更强的适应性,融合结果质量也更高。在分类方面RF分类器的运用效果优于MLC与SVM分类器,基于决策树思想的RF分类器在总体精度Kappa系数上具有更优秀的表现。
2) 在原始影像中加入不同重建数据的时间特征信息后,其土地覆盖分类精度均有提升,且精度提升幅度与时空融合重建结果质量成正相关。当融合重建结果质量越好时,分类精度的提升幅度越大。
3) 在基于时序影像的分类中,各分类器精度虽有提升但是幅度均不大,小于分类器之间的精度差值。表明时间特征对分类精度影响的程度小于分类器本身。不同地物类型分类精度变化幅度各不相同,时间特征对于分类精度的提升主要集中于林地和农田等受季节影响较大的植被类地物。
对于土地覆盖分类来说,准确采集研究区多方面的特征信息,是提升分类精度的一种重要方法,但精度的提升主要还是依赖于分类器的完善与强化。分类器自身对于精度的影响程度大于分类特征。同时,特征信息的采集方法也会对分类精度产生影响,运用较为精准的方法采集特征信息,是保证分类结果精度的关键。
在研究过程中,仍然存在一些不足。实验中只运用了13个时相的重建数据对精度提升效果进行分析,而重建数据的数量、所覆盖的时间段以及研究区的地理及气候条件也会在一定程度上对土地利用分类精度提升效果产生影响。因此,多源数据的引入对分类精度的影响情况也值得探讨,仍然需要进一步的实验对结论进行强化研究。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
四川党的建设(2022年8期)2022-04-28
电子产品世界(2022年4期)2022-04-21
小猕猴智力画刊(2022年3期)2022-03-28
农业工程学报(2022年1期)2022-03-25
计算机系统应用(2021年2期)2021-02-23
意林·作文素材(2021年23期)2021-01-22
小学生学习指导(低年级)(2020年11期)2020-12-14
计算机应用与软件(2020年1期)2020-01-14
计算机测量与控制(2019年4期)2019-05-08
