基于积分清零补偿的加速度计信号数字化处理方法
2020-11-18 07:36:58邹劲松冯济琴
仪表技术与传感器 2020年10期
邹劲松,冯济琴,唐 皇
(1.重庆工业职业技术学院,重庆 401120;2.重庆理工大学机械检测技术与装备教育部工程研究中心,重庆 400054)
0 引言
在捷联惯性导航系统中,陀螺仪和加速度计是重要的惯性敏感元件,除元件本身精度是影响导航精度的原因外,惯性敏感元件的输出信号处理更是导航精度的重要影响因素[1-2]。惯性导航系统的运行原理是导航计算机通过对载体运动的加速度进行积分,可得出定位所需的速度和位置信息[3],但因导航计算机只能处理数字信号,便需要采集电路将加速度计输出的模拟信号转换成数字信号。
目前,国内惯性导航领域,对加速度计数据采集方法主要采用直接A/D采样、电流频率(I/F)转换方法或者电压频率(V/F)转换方法。其中最常用的是I/F转换方法,但由于采用分立元件和I/F转换电路采用恒流源反馈特点,因此存在不能很好满足捷联惯性导航系统功耗小、体积小的应用场合[4-6]。而A/D转换采样加速度信号电路简单,稳定性好,但是会存在丢失采集精度等问题[7]。
现有的加速度计测量方法若用纯硬件的方式(I/F,V/F)进行处理,在不采用后期细分的基础上,无法同时保证全量程输出的线性度与转换后的实际分辨率,若用纯软件(A/D)的形式进行处理,则无法达到高精度采样[8-10]。
为充分发挥硬件和软件处理信号的各自优势,提出基于积分清零补偿的新型加速度计信号处理方法,将积分器的工作范围限定在线性区,解决不同幅值大小的信号采集问题;利用积分电路的特点使干扰信号得到有效抑制;同时利用对标准电压的积分消除电路中最大的积分时间常数的测量误差;利用A/D转换器采样积分输出,直接得到速度增量的数字量,提供给导航计算机用于解算载体速度和位置信息。采用硬件积分加软件清零补偿的方法提高导航速度增量测量的实时性和准确性。
1 加速度信号转换为速度增量的原理
加速度输出的电流信号经精密电阻转化为电压信号,通过电路积分器输出,然后再经高精度A/D转换器周期采样积分器输出的电压增量,得到积分器输出的数字量。其中硬件部分包含RC积分电路和高精度A/D转换电路,积分电路主要对输入的电压进行积分。软件部分主要是对A/D采样后的数据进行处理,对于实时输入的加速度计信号进行幅值判别,从而判断是否需要进行积分清零并补偿,同时计算出积分增量,最后输出速度增量用于导航解算。其具体系统设计如图1所示。

图1 加速度信号转换系统设计
加速度计因加速度作用输出电流,其关系见式(1):
Ia=a(t)G
(1)
式中:a(t)为加速度计的输入;G为加速度斜率。
加速度输出电流信号流过精密电阻Ra形成电压Ua作为积分器的输入,其与加速度关系见式(2):
Ua=a(t)GRa
(2)
根据微积分定理可得Ua在Ts区间上积分的增量ΔS为
(3)
则可以得到Ts区间速度增量为
(4)
因此只要测得加速度变换后信号Ua在Ts区间上积分的增量ΔS,就可以计算得到用于导航解算的速度增量Δv。
2 积分清零补偿模型的建立
2.1 积分增量ΔS的测量模型
输入端的Ua经过积分器后形成的积分电压Us,若采样Ti和Ti-1(Ts为采样周期)时刻的积分电压Us(i-1)、Usi,则可以得到Ts区间积分器输出电压的增量见式(5):
(5)
由微积分基本定理可得:
(6)

导航速度计算需要的速度增量解算需要测量Ts区间的Ua平均值的积分增量,其中KIN受温度影响最大,给加速度信号的测量带来较大误差。为消除测量积分时间常数的误差可以利用对标准电压进行积分,即当在加速度信号不接入积分电路时,通过测量标准电压UREF的积分值来消除KIN的测量误差,称为校准模式。校准模式下的积分周期设置为采样周期的1/n,因此标准电压的输出见式(7):
Ur=KRUREFTs/n
(7)
若设置RIN/Rr=n,将式(6)除以式(7),则得到:
(8)
式(8)中加速度变换后信号Ua在Ts区间上积分的增量:
(9)
标准电压乘以Ts为常数得到式(10):
Sr=UREF/Ts
(10)
因此,式(8)经过变换得到式(11):
(11)
ΔUsi、Ur的值根据测量积分器的输出电压Usi、Us(i-1)所得,Sr是一个常数,由此可见无需测量KIN即可得到加速度变换后信号Ua在采样区间上积分的增量,已消除掉积分时间系数KIN的测量误差。但是为了计算处理方便,还需要对式中的模拟量进行数字化处理。
假设在校准模式下对标准电压Ur在Ts/n区间采样得到的数字量为Nr,在导航模式下对加速度计电压在Ts区间的ΔUsi实时采样数字量为ΔNi,则式(11)可写为
(12)
因此积分增量ΔS的测量模型中只有ΔNi为实时变量,只要实时采集该数字量即可计算得到积分增量。
2.2 积分清零补偿方法
上述该方法中,积分电路在输出幅度受到运算放大器线性工作范围的限制,如果信号幅度较大,运算放大器容易进入非线性区,导致测量误差,这将不利于惯性导航系统的测量。但是在积分输出中设置一个阈值,这个阈值范围内运算放大器工作在线性区。积分电压在A/D采样中对应的数字量超过规定阈值时,根据需要,由软件自动切换电子开关,当电压超过正阈值时,控制SW2选通-UREF将积分器输出电压归零(下拉至零电压附近);当电压小于负阈值-UREF时,控制SW1选通将积分器输出电压归零(上拉至零电压附近);在归零完成后,自动关断SW1和SW2。整个过程加速度计一直处于正常工作状态,积分电路也工作在线性区,积分器输出图形具体见图2。
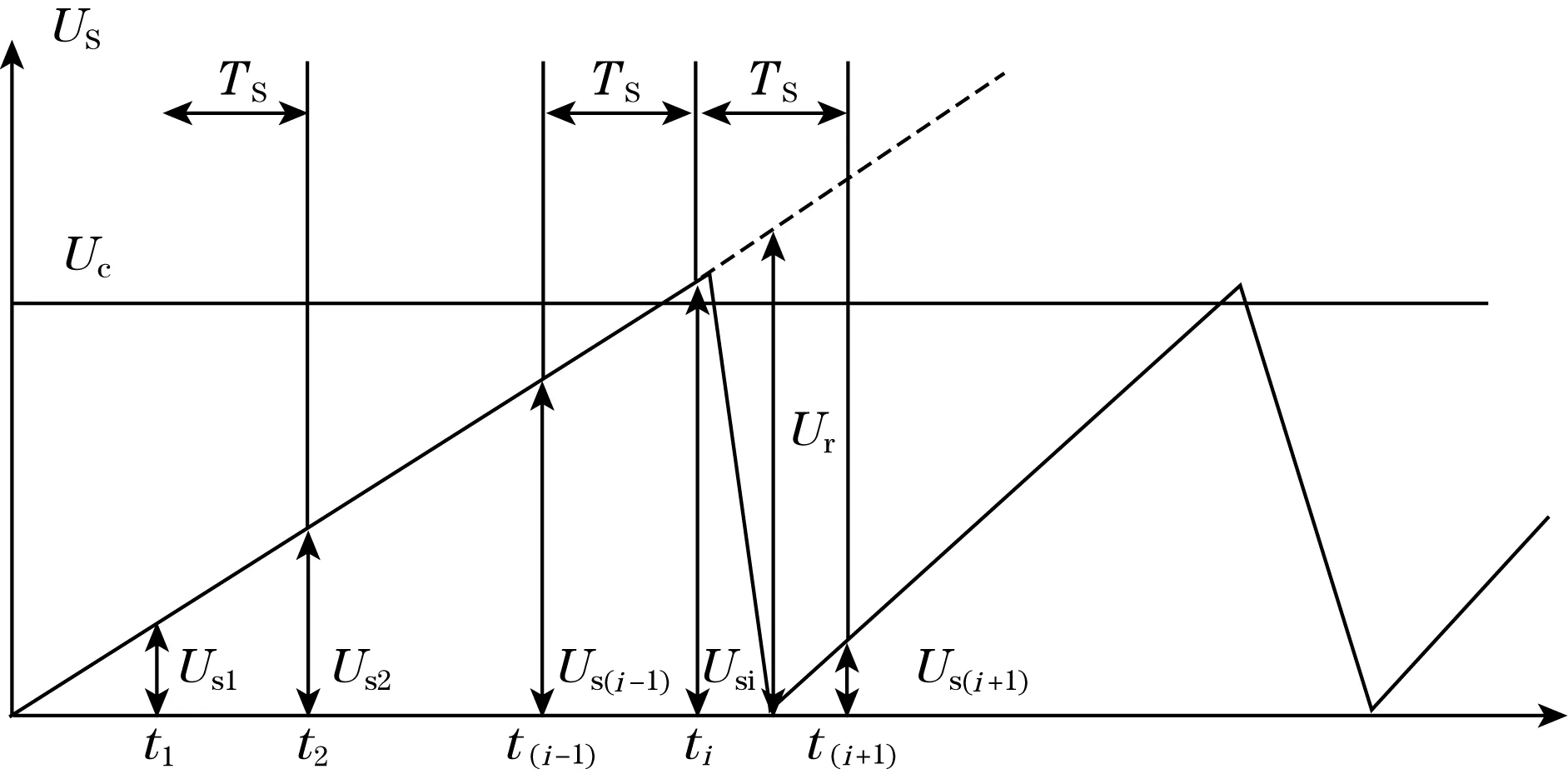
图2 积分器输出电压示意图
在实时采样积分器输出期间,若存在积分清零情况,则下一个采样时刻的积分电压在计算积分电压增量时需要进行补偿。将积分清零的时间控制在Ts/n,则该补偿电压值大小即为Ur,转换为数字量即为Nr。
因此在积分器没有清零和修正情况下积分器输出的数字量用式(13)计算。
ΔNi=Ni+1-Ni
(13)
在实时采样过程中若有清零情况出现,则在计算下一时刻积分器输出值时需要采用实时采样值再加上补偿值Nr,即式(14)。
ΔNi=Ni+1+Nr-Ni
(14)
由此通过适时清零积分器的输出,积分电压一直限定在线性区,在计算的时候对清零导致采样的误差进行补偿,完成积分器输出增量值的准确计算。
2.3 算法实现
先在校准模式下,完成对参数Nr的测量及计算;然后在实时导航模式下,微处理器周期性采样积分电路的输出信号,进行积分清零补偿方法建模。图3所示为积分清零补偿方法的软件流程图,将采集的加速度积分信号送到微处理器中,当积分电压超出阈值情况时,微处理器控制电路开关实现积分器清零动作,同时微处理器对积分器采样值进行补偿计算,带入校准模式下的Nr参数解算出3个轴向的实时速度增量Δv,提供给导航计算机用来解算速度和位置信息。

图3 积分清零补偿法流程图
3 实验方法及结果
3.1 实验系统简介
实验系统如图4所示,系统采用JN-06型加速度计为研究对象,为研究加速度计在重力输入和零输入条件下的加速度计输出情况,用本方法设计的加速度计信号处理电路置于某50型激光陀螺捷联惯性导航系统中。将惯性系统水平置于测试实验台上,X、Y轴为重力轴垂直方向,加速度信号输入近似为0,Z轴为重力加速度反方向,加速度信号输入为当地地理位置下的重力加速度值(近似为-1g)。由此得到的加速度计三轴在重力输入和零输入条件下的数据输出结果,通过串行通信接口将数据发送至上位机保存后进行数据分析。具体实验图见图4。

图4 实验研究系统
3.2 实验方法和结果

图5、图6、图7分别为对X、Y、Z三轴加速度计信号处理后得到的速度增量。

图5 X轴输出的速度增量

图6 Y轴输出的速度增量

图7 Z轴输出的速度增量
图中X轴加速度计处理后1 s的速度增量变化量小于1.2×10-5m/s,Y轴加速度计处理后1 s的速度增量变化量小于2×10-5m/s,Z轴加速度计处理后1 s的速度增量变化量小于5×10-5m/s。
4 结论
采用硬件积分加软件清零补偿的方法,充分发挥了硬件的快速性和软件算法的灵活性,从加速度计信号转换为数字信号的方法上创新。
(1)通过硬件积分电路对加速度信号积分,实时输出电压增量,再根据校准模式下测量标准电压的积分器输出,消除受温度影响大的RC测量误差,在实时解算中能快速解算出速度增量。
(2)通过设置积分电路线性输出阈值,用清零方法来实现积分器一直工作在线性区域,同时积分器清零的电压用标准电压实现,积分器清零后输出补偿值利用校准模式下的测量值作为补偿量,可以消除积分器输出电压增量的测量误差,同时补偿值是校准模式下测量所得,因此在实时解算中也加快了解算速度。实验表明该电路的设计适合频率变化较快、加速度变化范围大的信号采集,在充分考虑各种因素的基础上克服了目前国内通用V/F、I/F、A/D直接采样等方法对加速度计数据采集的不足,可以满足中、高精度惯性导航系统对加速度计信号处理的需要,为惯性导航加速度计信号处理提供了新思路。
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:12:22
中国特种设备安全(2021年5期)2021-11-06 05:09:08
中学生数理化·中考版(2019年9期)2019-11-25 09:39:44
电子科技(2018年8期)2018-07-23 02:15:28
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41
电信科学(2016年9期)2016-06-15 20:27:25
电测与仪表(2016年24期)2016-04-12 00:21:12
电测与仪表(2015年6期)2015-04-09 12:01:12
电子设计工程(2015年16期)2015-02-27 12:07:58